Robotics
1/111
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
112 Terms
The term ___ refers to the engineering and use of robots.
robotics
A multifunction manipulator programmed to perform various tasks is a(n) ___.
industrial robot
Machinery that is capable of performing a variety of tasks is referred to as ___.
flexible automation
An intelligent robot uses ___ to detect changes in the work environment.
sensors
A manipulator is the ___ of the robot.
arm
A ___ robot has a manipulator that can repetitively perform the successive, predetermined steps of a given operation and the order can be easily changed.
variable-sequence
___ refers to a machine’s use of sensors to communicate with other machines through the internet.
Machine-to-machine communication
The first automation were clockwork devices used to track time automatically.
True
Artificial Intelligence is the ability of a person to control a robot.
False
According to the Robot Institute of America’s definition, a robot is a reprogrammable, multifunctional manipulator.
False
The operation instructions for a fixed-sequence robot can be easily changed.
False
The Fourth Industrial Revolution is a period defined by the development of the computer.
False
Robots are part of the flexible automation category of machinery.
True
Robots perform work that relieves men and women from repetitive operations that are monotonous.
True
The ability of a computer program to make decisions based on known information is ___.
Artificial Intelligence
A(n) ___ is the term originally used for what we now consider to be a robot.
automaton
A robot that can be given new instructions to perform new tasks is considered ___.
reprogrammable
Machinery used for ___ automation is specifically designed and built for particular tasks on an assembly line.
hard
Science fiction writer ___ included three fundamental laws of robotics in his story Runaround published in 1942.
Isaac Asimov
The ___ generation of manufacturing robots includes hazardous environment robots, navigation robots, and biped robots.
third
A(n) ___ robot has a humanlike form.
anthropomorphic
A robot unit in a humanlike form.
Anthropomorphic robot
A robot that performs new tasks when given new instructions that allow it to meet changed instructions.
Reprogrammable robot
A manipulator that repetitively preforms the steps of an operation based on predetermined conditions, which cannot be easily changed.
Fixed-sequence robot
A manipulator that reproduce a sequence of movements originally executed under the control of a human operator.
Playback robot
A manipulator worked by a human operator.
Manual manipulator
A manipulator that repeatedly performs successive steps of an operation, which can be easily changed.
Variable-sequence robot
A manipulator that performs a sequence of movements to complete a task based on numerical data provided.
Numerically controlled robot
A robot that can, by itself, detect changes in the work environment and use decision-making abilities to determine how to proceed.
Intelligent robot
The five main components of an industrial robot include which of the following?
Means for programming
A controller has ____ levels of hierarchical control.
3
The highest hierarchical control level is the ____ control.
main
The ____ provides the energy to drive the robot’s controller and actuators.
power supply
Which of the following is an example of a means for programming?
All of the above.
A robot’s ability to move up and down, forward and backward, and to the left and right is described as the robot’s ____.
degrees of freedom
The vertical traverse provides ____ motion of a robot’s arm.
up-and-down
In a(n) ____ system, no feedback mechanism is used to compare programmed position to actual positions.
open-loop
A servo robot is a(n) ____ system because it allows for feedback signals.
closed-loop
Three types of motors commonly used for ____ actuator drives include ac servo motors, dc servo motors, and stepper motors.
electric
A(n) ____ drive system uses fluid and consists of a pump connected to a reservoir tank, control valves, and an actuator.
hydraulic
The shape of a robot’s work envelope is determined by the ____.
All of the above.
A robot arm using the ____ configuration can start and stop simultaneously along the X, Y, and Z axes.
Cartesian
The ____ configuration consists of two orthogonal slides placed at a 90° angle and mounted on a rotary axis.
cylindrical
The power supply of a robotic system may convert ac voltage to the dc voltage required by a robot’s circuits.
True
The five major components of industrial robots are the controller, manipulator, end effector, base, and workpiece.
False
Robot movement is initiated by a series of instructions stored in the end effector.
False
Hierarchical control organizes commands from the software to the parts of a robot into layers.
True
Linear actuators provide rotary motion to a robot’s arm.
False
The end effector is attached to the end of the robot arm.
True
Pitch is the side-to-side movement of a robot’s wrist.
False
The operations of a robot with seven degrees of freedom are less complex than the operations of a robot with three degrees of freedom.
False
A non-servo robot is a closed-loop system
False
A servo amplifier translates signals from the controller into motor voltage and current signals.
True
Hydraulic actuator drives provide precise motion control and can handle heavy loads.
True
The four major work envelope configurations are revolute, Cartesian, spherical, and open.
False
The work envelope of a robot using a Cartesian configuration is rectangular in shape.
True
The ______________________________ is the part of a robot that coordinates all movements of the mechanical system.
controller
The three basic levels of hierarchical control are actuator control, path control, and ______________________________ control.
main
The arm of a robot that moves materials, parts, or tools is the ______________________________.
manipulator
Rotary motion can be converted to ______________________________ using a lead screw or other means of mechanical conversion.
linear motion
A(n) ______________________________ measures the acceleration and deceleration of the manipulator.
tachometer
The ______________________________ is the robot’s hand.
end effector
The extending and retracting movement of a robot arm is an example of ______________________________ traverse motion.
radial
The movements of ______________________________ configuration robots closely resemble those of the human body.
revolute
Three common characteristics used to classify robots are type of ______________________________, type of actuator drive, and shape of the work envelope.
control system
The simplest type of robot is a(n) ______________________________ robot, also called a limited sequence robot.
non-servo
A(n) ______________________________ actuator drive system operates using compressed air.
pneumatic
The ______________________________ configuration is ideally suited for pick-and-place operations, but has reduced repeatability and accuracy.
cylindrical
The movement of a(n) ______________________________ configuration robot resembles the action of the turret on a military tank.
spherical
A(n) ______________________________ configuration is horizontally articulated and generally has one vertical and two revolute joints.
SCARA
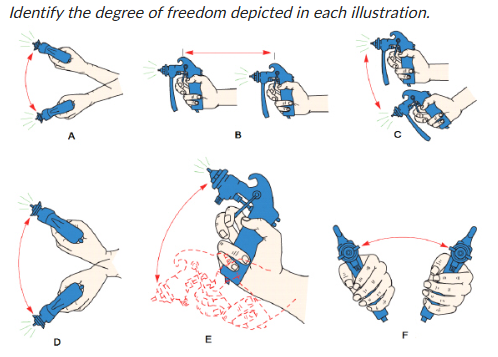
__Pitch, __Vertical transverse, __Radical Transverse, __Yaw, __Roll, __Rotational transverse
Option E, Option C, Option B, Option D, Option F, Option A
A combination or modification of other configurations.
Special
All of the following are examples of personal protective equipment, except ____.
sunglasses
Fire extinguishers that contain different substances are used to ____.
put out different types of fires
The set of regulations covering electrical wiring safety in residential and commercial buildings is ____.
National Electrical Code (NEC)
A ____ is a component of an electrical system that can be opened or closed to allow or interrupt the flow of current.
circuit breaker
A(n) ____ conductor should be used with power tools and electrical equipment.
three-wire
Use ____ procedures when repairing equipment to disable machinery and prevent hazardous energy releases.
lockout/tagout
According to OSHA safety color codes, the color ____ indicates a radiation hazard.
purple
The ANSI/RIA R15.06-2012: American National Standard for Industrial Robots and Robot Systems—Safety Requirements document provides safety requirements for industrial robot ____.
All of the above.
A(n) ____ is a safety device designed to prevent unauthorized access to hazardous areas by requiring a key for entry.
interlock
A(n) ____ prevents unauthorized entry and contains any flying objects.
safety fence
Using a ____, the light beam between two sensors is broken when a worker enters the work envelope, which sends a signal to cut the power to the robot.
light curtain
Overload protection can be provided by ____, which are pins or tubes that break or buckle under extreme stress.
mechanical fuses
An electrical shock is an injury that occurs when a person comes into contact with electric current.
True
Grounding electrical equipment stops the flow of current before it reaches the ground.
False
When a power surge reaches a fuse in an electrical system, the flow of current is interrupted.
True
Organized tool storage can contribute to a safe working environment and prevent loss.
True
Equipment grounds reduce the possibility of shock due to electrical shorts or leakage.
True
Paint or colored tape may be used on the floor to outline the perimeter of the robot’s work area
True
Barriers and sensing systems prevent theft of robotic machinery.
False
Preloaded springs are two or more elements held in position by spring-loaded mechanisms.
False
Many work-related injuries are the result of taking shortcuts or performing work with too much haste.
True
Clothing or devices that shield a worker’s body and help prevent injuries are called ______________________________.
personal protective equipment
Tools and equipment plugged into electrical outlets should be wired with ______________________________ cords and plugs.
grounded
A(n) ______________________________ consists of supplies and equipment used to treat a person in the event of an accident or injury.
first aid kit
The ______________________________ is an agency of the US federal government that sets and enforces standards related to worker safety.
Occupational Safety and Health Administration
When a circuit breaker is ______________________________, the electrical current flows uninterrupted along the channel.
closed
A(n) ______________________________ conductor should be used with power tools and electrical equipment.
three wire
Two primary safety devices used in a robot work area are barriers and ______________________________.
sensing devices