Junior Design Final
5.0(1)
Card Sorting
1/134
There's no tags or description
Looks like no tags are added yet.
Last updated 10:27 PM on 5/7/23
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
135 Terms
1
New cards
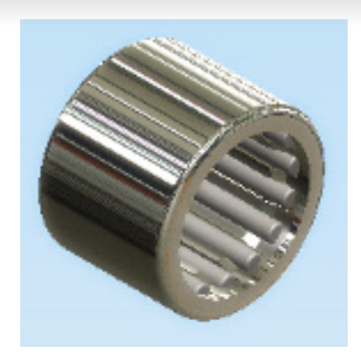
Cylindrical
What type of bearing is this? _____________ roller bearing.

2
New cards
Servo
______ motors are used to control the orientation of the output shaft over a range of 0 to 180 degrees.
3
New cards
Servo
A _________ motor includes a motor AND encoder to control the shaft orientation based on an input command.
4
New cards
Resolution
The minimum possible motion in a drive. It is extremely important in a positioning system.
5
New cards
Resolution
An example of _____________ is if there are 360 steps per revolution, then the minimum angular change that can be commanded in one degree.
6
New cards
Repeatability
The closeness of the agreement between the results of successive identical commands carried out under the same conditions (same procedure, observer, instrument, and location over a short time period) in a drive.
7
New cards
Repeatability
An example of _____________ is if you command a single step five consecutive times in the same direction, do you get one degree steps each time?
8
New cards
Uncertainty
A parameter that characterizes the dispersion of the values that could reasonably be attributed to the drive result.
9
New cards
Uncertainty
An example of _________ is … how well do you know that 10 steps causes a 10 degree rotation? What accuracy do you require for your drive system in order to realize the robot functional requirements.
10
New cards
B
We used Type ___ Uncertainty for our project which is the evaluation of uncertainty by means other than the statistical analysis of series of observations (data collected from anything other than an experiment you perform). Standards performed by another laboratory for comparison is a good example. In our case, we have an equation which describes the our system position and inputs for our desired position as well as their individual uncertainties.
11
New cards
Load
You must consider the ______ that will be driven by the stepper motors in this project. They have a torque limit (which may be speed dependent) and your load cannot exceed this torque or you will stall the motor (it will SKIP steps).
12
New cards
Range
The ______ is the maximum distance that your drive must be able to accommodate.
13
New cards
Speed
The __________ can be faster for your robot, but may reduce the accuracy or repeatability.
14
New cards
Mass
As the _____ increases, the torque required to drive the mass increases.
15
New cards
Compliance
This means that a robot has flexibility in one or more of its joints.
16
New cards
Stepper
A __________ motor is a brushless DC electric motor that divides a full rotation of the output shaft into an equal number of steps.
17
New cards
Stepper
A __________ motor’s position is commanded to move and hold at a set step without any feedback sensor (it is an open-loop system because there is no feedback and steppers are generally less accurate than servo motors).
18
New cards
Unipolar
A _________ stepper motor 1 or 2 wires are the center tap that attaches to ground on the Arduino.
19
New cards
Bipolar
A ________ stepper motor has no ground wire and 2 wires attach to M1 or M3 on the Arduino board. The other 2 wires attach to M2 or M4. These wires are outer taps.
20
New cards
Stepper
A ___________ motor does not have an inherent home position.
21
New cards
Open
A stepper motor operates in _______-loop mode which means you command the position, but don’t get any feedback about whether that position was actually reached.
22
New cards
Stepper
When powering a __________ motor, it will begin to rotate from whatever position it was in when it turned off.
23
New cards
Close
A servo motor operated on a __________-loop control system due to the encoder feedback.
24
New cards
Servo
A ________ motor has three wires: power, ground, and signal.
25
New cards
Power
On a servo motor, the _________ wire is typically red and should be connected to the 5V pin on the Arduino board (marked as +).
26
New cards
Ground
On a servo motor, the _________ wire is typically black or brown and should be connected to a ground pin on the Arduino board (marked as -).
27
New cards
Signal
On a servo motor, the _________ wire is typically yellow, orange, or white and should be connected to a digital pin (9 or 10) on the Arduino board (the S pin).
28
New cards
Microswitch
A ____________ is an electric switch that is actuated by very little force through the use of a tipping-point mechanism.
29
New cards
Microswitch
A ___________ has a defining feature which is that a relatively small movement at the actuator button produces a relatively large movement at the electrical contacts.
30
New cards
Closed
On a microswitch, normally ____________ means the switch is closed unless the button is depressed. Then the circuit is open. Output from the switch.
31
New cards
Open
On a microswitch, normally ___________ means the switch is open unless the button is depressed. Then the circuit is completed. Output from the switch.
32
New cards
Common
On a microswitch, the _____________ pin provides input to the switch.
33
New cards
Driver
It is important to pay attention to the operating voltage of a _________ because, if the operating voltage is not supplied it will NOT turn on.
34
New cards
Setup
In the ________ loop of code, the code within this function will only run one time when power is applied to the Arduino.
35
New cards
Loop
In the void _______ function of the code, the code will run continuously as long as the Arduino has power.
36
New cards
pinMode
In code, ___________() allows you to declare a digital pin as either an input or output.
37
New cards
analogRead
In code, ____________() allows you to read a signal.
38
New cards
digitalWrite
In code, ____________() allows you to write either a “HIGH” or “LOW” to an output digital pin.
39
New cards
Serial.begin
In code, ______________ allows use of the Serial Monitor. This is useful for troubleshooting.
40
New cards
analogRead
In code, ____________(pin_num) allows an analog read from a designated analog pin.
41
New cards
analogWrite
In code, ____________(pin_num, value) allows an analog write to a certain analog pin.
42
New cards
digitalWrite
In code, ___________(pin_num, HIGH or LOW) allows a digital write of HIGH or LOW to a designated digital output pin.
43
New cards
digitalRead
In code, ____________(pin_num) allows a digital read from a designated digital input pin.
44
New cards
Delay
In code, ________(time) delays the program by a specified amount of time in milliseconds.
45
New cards
Library
A ___________ is a collection of prewritten codes that can be accessed when it is referenced.
46
New cards
Steppers
___________ use shaped gear-like magnets with corresponding coils to create stepwise movements.
47
New cards
Single
A common stepper takes 200 steps to complete a full rotation (1.8 deg / sec). This is called ________ stepping.
48
New cards
PWM
For stepper motors, a further resolution can be achieved by applying the coils with a _________ signal.
49
New cards
75
Dynamics torque is _____% of holding torque.
50
New cards
Decrease
For stepper motors, using anything other than single stepping will further _______________ the amount of torque your motor provides.
51
New cards
Slower
For stepper motors, anything other than single stepping the motor will cause it to rotate __________ that single step movements unless the rate at which pulses are given is increased.
52
New cards
Vibration
Stepper motors, just like every single other static or dynamic component are subject to __________.
53
New cards
Vibration
Stepper motors exhibit a potentially high amount of ___________ either when under no load or when they are run at their resonance frequency.
54
New cards
Servo
________ motors consist of a DC motor, a gearbox, and a feedback mechanism. A control circuit onboard performs PID control to move the output shaft to the input location.
55
New cards
High
Servo motors have a _________ accuracy and will attempt to maintain their position even when external forces are applied.
56
New cards
Integer
You must use _________ inputs for servo positions when using an arduino.
57
New cards
servo.writeMicroseconds
You can use _________________ to get better resolution for servo motors.
58
New cards
40
The Arduino Mega 2560 can provide _____ mA of current per pin.
59
New cards
200
The Arduino Mega 2560 can provide ___________ mA of current for the whole board.
60
New cards
5
The USB provides __ V to the Arduino.
61
New cards
Forward
You use ________________ kinematics to check inverse kinematics.
62
New cards
Torque
______________=(Moment of Inertia)\*(Angular Acceleration)
63
New cards
Inertia
To determine the required torque, we need to know the moment of _________ for the load that the motor will be driving (this depends on your design).
64
New cards
Acceleration
The angular _____________ represents the time rate of change of angular velocity (i.e. the motor rotating speed).
65
New cards
Uncertainty
In order to perform ______________ analysis on the robot, we use a first-order Taylor-Series expansion of two given equations.
66
New cards
68%
If you multiply uncertainty by a factor of 1, you can be _________ confident in your result.
67
New cards
95%
If you multiply uncertainty by a factor of 2, you can be _________ confident in your result.
68
New cards
99\.7%
If you multiply uncertainty by a factor of 3, you can be _________ confident in your result.
69
New cards
Gear
If the stepper resolution is not sufficient for a direct drive solution, you can use a _____ set to increase the resolution.
70
New cards
Directly
Running direct drive means the motor drives the link ____________.
71
New cards
Speed
Adding a gear set improves resolution and torque, however we sacrifice _______ in the process.
72
New cards
Reflected
_____________ inertia is the moment of inertia the motor “sees” through the gear set.
73
New cards
Meshing
The proper __________ of the teeth in gear-pairs is CRUCIAL for continuous power transmission.
74
New cards
Pressure
The most common ______ angles for gears are 20 and 14.5 degrees.
75
New cards
Pressure
The ____________ angle is the angle between the line of action and the tangent to the pitch circles of the gears.
76
New cards
T
For proper meshing, gears must have the same pressure angle (T/F).
77
New cards
T
For proper meshing, gears must have the same module (T/F).
78
New cards
Module
The _________ of a gear can be calculated by taking the pitch diameter and dividing by the number of teeth.
79
New cards
Backlash
___________ is the amount of lost motion when movement is reversed.
80
New cards
Backlash
In a pair of gears, _________ is the amount of clearance between mated gear teeth.
81
New cards
Repeatable
It is possible to compensate for backlash within the programming if ______________, however, it will most likely cause some amount of uncertainty.
82
New cards
Belt
A _______ drive can be used to transmit rotary motion (it may be toothed). It will obtain the same behavior as a gear set, but an offset must be accounted for and an axis is required for each pulley. Additionally, belt tension MUST be considered.
83
New cards
Bearings
__________________ and bushings are used to support shafts rotating through provided axes.
84
New cards
Bearing
A _________ is a contact surface through which a load is transmitted. When relative motion occurs, we attempt to minimize friction and wear.
85
New cards
Bearings
There are two basic types of _____________: slide and roller element.
86
New cards
Sliding
_________ bearings work by direct sliding of the load-carrying member on its support.
87
New cards
Roller
__________ element bearings have balls or rollers that are located between the sliding surfaces.
88
New cards
Sliding
Two types of ________ bearings: journal/sleeve bearings and thrust bearings.
89
New cards
Journal
___________, or sleeve bearings are perpendicular to the shaft axis and support radial loads. They are cylindrical.
90
New cards
Thrust
_________ bearings support loads in the direction of the shaft axis.
91
New cards
Bushing
For the sleeve bearing, when it is not split and is a single cylindrical shell that is pressed into a hole in a housing, it is referred to as a __________.
92
New cards
Strength
Due to the high amount of stress and small contact area, roller element bearings are made of high _____ materials.
93
New cards
Roller
________ bearing components include the inner and outer rings (races) and the balls/rollers.
94
New cards
Roller
Types of _______ bearings include radial (for radial loads), thrust (for axial loads), and angular contact (for combined radial and axial loads).
95
New cards
Roller
Compared to ball bearings, ________________ bearings can support heavy radial loads and limited axial loads.
96
New cards
Spherical
What type of bearing is this? ___________ roller bearing.

97
New cards
Tapered
What type of bearing is this? ___________ roller bearing.

98
New cards
Needle
What type of bearing is this? ___________ roller bearing.
99
New cards
Two
In most applications, ______ bearings support the rotating component in the equipment, one is the fixed or locating bearing and the other is the floating or non-locating bearing.
100
New cards
1
A Class ___ (Loose) Clearance Tolerance Fit is used where accuracy is not essential (like in building in mining).