OPERATING SYSTEMS
1/53
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
54 Terms
Generations of computers
1st Gen: vacuum tubes; manual
2nd Gen: transistors & batch operating
3rd Gen: intergrated circuits & multiprog
4th Gen: PCs: GUI
5th Gen: mobile and cloud computing
OS systems
Windows, Linus, iOs, Android
Operating System/system software?
comp progs that administrate resources of a computer and make them available via interfaces
Goals of OS
abstraction of Hardware
Resource management
communication
security
What does OS do?
examine or alter any process’s memory
read, write, delete or corrupt any file on any writeable persistent
storage medium
change the scheduling or even halt execution of any process
send any message to anywhere, including altered versions of a process’s messages
enable, disable, or use any peripheral device
reliabilty?
protection against accidental/unintentional damage
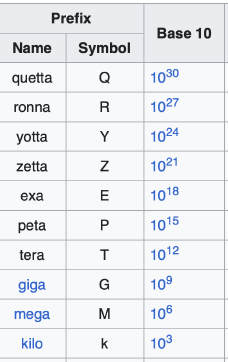
KB
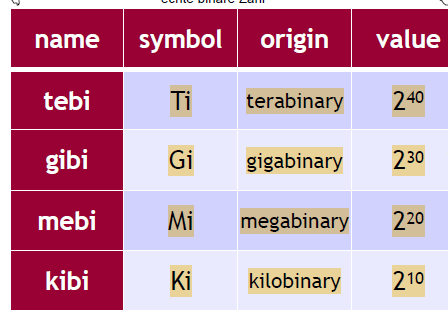
KiB
Modes of operating system?
user mode(restricted) and kernel mode(priveleged)
in user mode, only the application crashes; in kernel mode, the whole system goes down
Process vs thread
A process is a running program while thread is a lightweight process.
process is needed to create multiprogramming systems
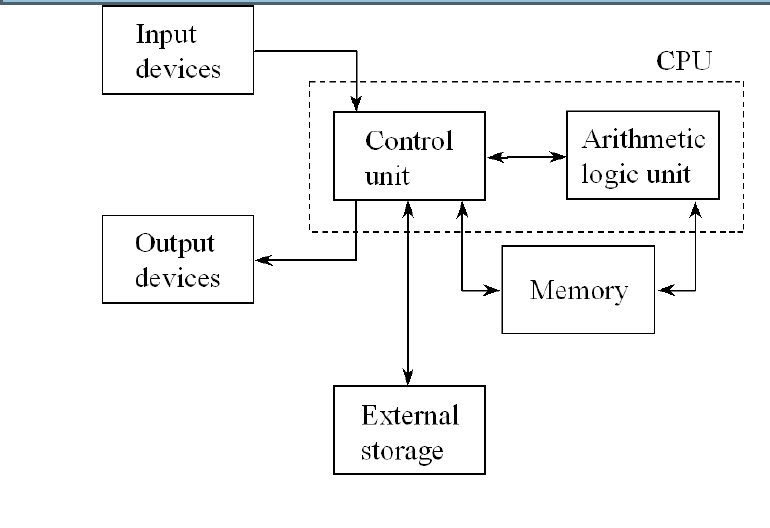
architecture of a computer
instruction cache why needed?
stores frequently used instructions;
advantage: faster retrival and execution
vNA, HA, mHA?
vNA: cannot read data and instructions at the same time
HA: can do what vNA cant; better performance but complexity
mHA: just like Harv Arch but has an instruction cache
Bus?
a set of parallel pathways for data and control signals;
The CPU, memory, and I/O devices are all connected by a system bus and communicate with one another over it. (in a PC)
Direct Memory Access
transfer data directly without interfering with the CPU;
HOLD (hold signal) and HLDA (hold acknowledge) to initiate process;
CPU receives interrupt oncecopying is done;
why CPU mit registers?
memory access is slow compared to execution of instructions
computer organization
the way a given instruction set architecture (ISA) is implemented in a particular processor
CPU has?
Program counter
Stack pointer
Flags indicate status
Fetch / Decode / Execute pipelines
multicore caching?
Hyper-Threading increases the number of instructions available to the superscalar pipeline by enabling two threads to issue instructions simultaneously on a single physical core. This enhances resource utilization by allowing multiple instructions from different threads to operate in parallel on separate data, improving overall throughput.
interrupts cause?
‣ Event-driven interruption of program flow;
short privileged subprogram executed by interrupt handler
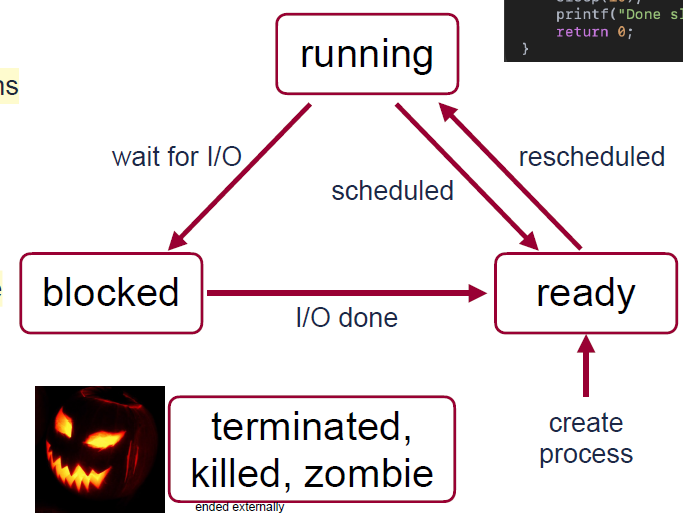
process states
process paralleity how?
pseudo-parallelism:
each process is run for a short time, about 10 to 100 ms each
Processes still run sequentially, but can be interrupted anytime
Also solves another problem: switching to time-critical tasks
process control block?
owned by eacj process
Unique process identifier (PID)
State
Complete execution state (program counter, stack pointer, registers)
Resources (memory, files, …)
Other information (scheduling, rights, …)
context switch ?
is switching CPU execution between different active processes.
the operating system
1. Stores the current process’ state in its process control block
2. Sets the system state to another process’ state from its control block
consequence sof process switching
‣ Exact timing of processes is non-deterministic
‣ Anything can happen between two CPU instructions
‣ Context switching consumes CPU time and happens often
Interrupt handler structure?
1. Save program state
2. Check/handle device activity (reason why we interrupted)
3. Restore program state
4. Continue interrupted program
Types of interrupts
hardware: asynchronous; occurs at arbitary times; generated by internal &external devices
software: synch; occurs at a specific point in the execution of the
CPU’s instructions; generated by instructions
interrupt controller n vector?
‣ interrupt controller: hardware component that manages and prioritizes interrupts from various sources
‣ interrupt vector: serves as a lookup table or array that maps interrupt numbers or codes to the memory addresses of their corresponding interrupt service routines (ISR)
Handling of external interrupts:
1. A device signals its interrupt via the bus.
2. The interrupt controller recognizes it.
3. The interrupt controller signals the CPU, providing a number identifying the device.
4. The CPU uses the number to retrieve the address of the interrupt service routine from the interrupt vector.
5. The CPU saves the current state.
6. The CPU calls the interrupt service routine.
7. The CPU restores the saved state.
8. The CPU signals the interrupt controller that the interrupt has been handled.
Interrupts within interrupts?
either forbidden or nested interrupts or interrupt priorities
Where is the interrupt vector stored?
either pointer/register or fixed memory address
Where is the current state stored?
registers need to be saved: e.g., single stack for all interrupts, some processors
have a complete second set of registers
diff betwen impreecise and precise interrupts
Precise interrupts: interrupted instruction is completed and architectural state (registers, program counter, etc.) reflects the state before the interrupt
Imprecise interrupts: allow some speculative execution or out-of-order execution when continuing after interrupt
Daemon
Background process
When are processes created?
‣ System initialization (init process PID 1)
‣ Other processes
‣ User
‣ Batch jobs
fork() work?
‣ Creates a new (child) process
‣ Child process is a copy of parent process
‣ Child has unique process identifier (PID)
‣ File descriptors are shared
‣ Return value indicates success (success: fork() returns 0 & PID of child to parent process; otherwise -1)
When are processes terminated?
‣ Regular termination (voluntary) exit(int status)
‣ Error (voluntary) signal
–––––––––––––––
‣ Severe error (by operating system)
‣ Other process (involuntary)
Process API:
set of system calls provided by an operating system to allow programs to interact with and control processes, e.g.: int kill(pid_t pid, int sig)
Thread
threads of a process share the same address space;
faster and use less memory as comparfed to processes
control of CPU execution
Thread switches
require fewer resources to be stored/retrieved:
‣ Unique thread identifier
‣ State (running, blocked, …)
‣ Complete execution state (program counter, stack pointer, registers)
‣ Resources: stack
Thread API
‣ Create a thread; accepts a callable (function)
‣ Exit from thread
‣ Join another thread, that is, block until it finishes
‣ Yield execution: volunteer to not being scheduled for now
POSIX threads(pthreads):
‣ pthread_create (similar to fork), pthread_exit, pthread_join,
pthread_yield
‣ pthread_attr_init, pthread_attr_destroy
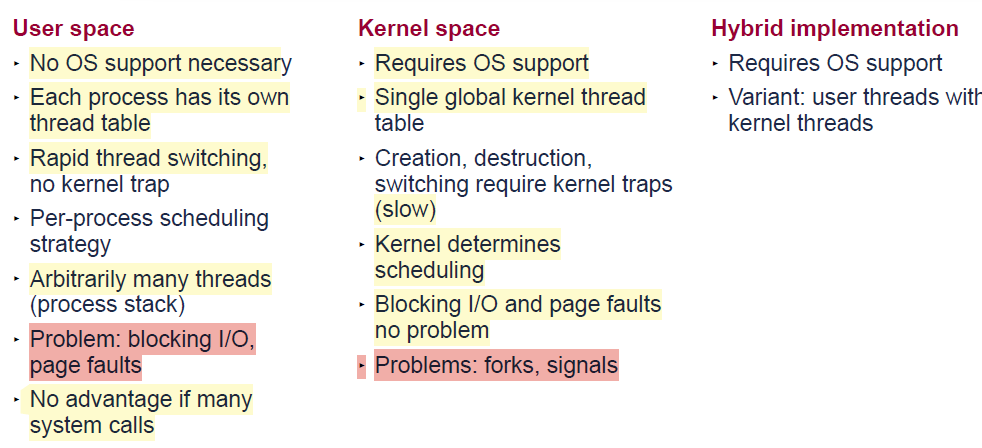
Thread implementation
Scheduling?
The scheduler decides which process to run next using a scheduling algorithm
Different scenarios require different strategies/algorithms
cooperative vs preemptive scheduling
coop: embedded systems
preeemptive: modern OS; timer interupts

Scheduling scenarios
Batch processing
Structured processing of non-interactive tasks
Mainframes, data centers
Bulk database updates, automated transaction processing, scientific computing, …
Interactive systems
Few interactive tasks
Personal computers, servers
Office software, programming, email, …
Real-time systems
Known time-constrained tasks
Devices (measurement, control, processing)
Embedded/industrial/ medical devices, robots, video/audio, …
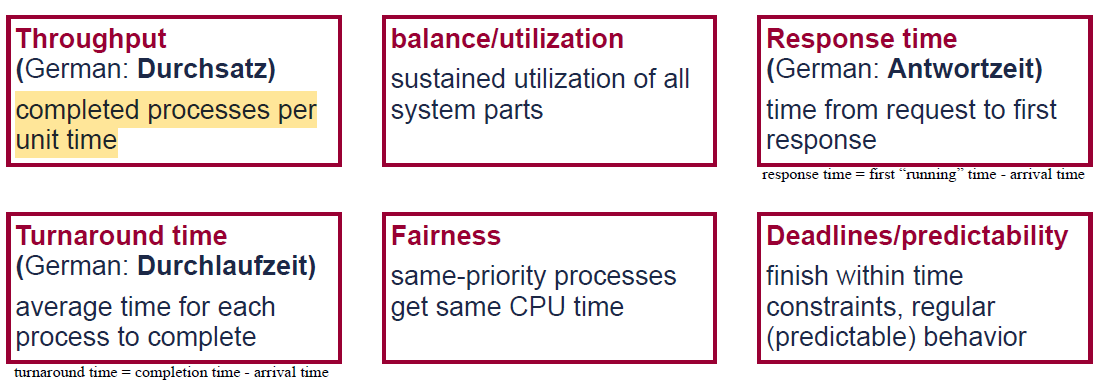
scheduling criteria
Separation of scheduling algorithm and policy via parametrization
enables processes and users to influence the schedule
First Come First Serve
jobs processed in order of arrival
cooperative scheduling
implementation in queue
can be ineff
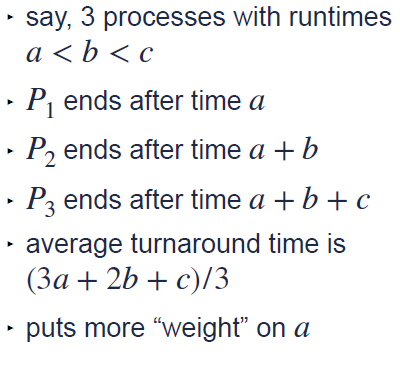
shortest job first
‣ Jobs are processed in order of their runtimes
‣ Cooperative form of scheduling
‣ Provably shortest turnaround times
vulnerable; starvation
shortest remaining time next
Jobs are processed in order of their remaining runtimes
Preemptive variant of Shortest-Job First scheduling
Round Robin
‣ Each process can run at most for a given time quantum
(time slice)
‣ Preemptive form of scheduling
‣ Assumes all processes are equally important
‣ Another process is switched in if the current process either
(a) blocks due to I/O or
(b) exceeds its time quantum
+ Prevents starvation
− Bad turnaround times, no priorities
Priority scheduling
Schedule processes with higher priority first
‣ Preemptive form of scheduling
‣ Priorities can be dynamically adjusted,
-starvation: ‣ Hybrid variant:
Priority classes, round-robin scheduling within class (still starvation)
Lottery scheduling
‣ Stochastic scheduling, resources assigned via lots
‣ Preemptive form of scheduling
‣ Priorities via additional lots
Multi-Level Feedback-Queue scheduling
‣ Optimize turnaround time and response time for users (generally contradictory objectives)
‣ Preemptive form of scheduling
‣ Hybrid between priority and Round-Robin scheduling (within same priority)
‣ Varies priorities based on observed behavior: processes that consumed their CPU quantum are de-prioritized
‣ Starvation (fixed by boosting)
‣ Can be gamed