M1110 Lineární algebra I
1/94
Earn XP
Description and Tags
Flashcards pro přípravu na zkoušku z lineární algebry. PS 2024.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
95 Terms
Definuj těleso.
Těleso je algebraická struktura, která obsahuje dvě operace, sčítání a násobení, a splňuje určité axiomy, jako je asociativita, komutativita, distributivita, existence význačných prvků; konkrétně existence neutrálních prvků (0 pro sčítání a 1 pro násobení), opačných a inverzních prvků.
Definuj skalár.
Skalár je prvek tělesa. Jako takový se používá pro násobení vektorů a matic.
Definuj komplexní číslo.
Komplexní číslo je číslo z ve tvaru a + bi, kde a spolu s b jsou reálná čísla a i je imaginární jednotka.
Definuj algebraický tvar komplexního čísla.
Komplexní číslo z v algebraickém tvaru zapisujeme jako z = a + bi, kde a je reálná část komplexního čísla z, b je imaginární část komplexního čísla z, i je imaginární jednotka.
Definuj imaginární jednotku.
Imaginární jednotka je symbol i, který představuje druhou odmocninu z -1. To znamená, že i2 = -1.
Jak definujeme sčítání dvou komplexních čísel?
Sečteme nejdříve reálné části a poté komplexní části.
Jak definujeme násobení dvou komplexních čísel?
Podle klasických algebraických pravidel, přičemž i2, které vznikne roznásobením můžeme nahradit -1 (dle definice), takže platí:
(a + bi)(c + di) = ac + adi + bci + bdi2 = ac + adi + bci − bd = (ac − bd) + (ad + bc)i
Jaké mají komplexní čísla důsledky?
řešení rovnice x2 = −1, konkrétně x = i a x = −i
možnost řešit kvadratické rovnice s negativním diskriminantem
zachování všech algebraických pravidel pro sčítání a násobení
Definuj komplexně sdružené číslo.
z¯ = a − bi
Jak je definována absolutní hodnota z?
|z| = odmocnina(a2+b2)
Jaké jsou výhody algebraického tvaru?
snadná interpretace reálné a imaginární části
jednoduché sčítání a odčítání
intuitivní a praktický způsob reprezentace a manipulace s komplexními čísly v matematice a jejích aplikacích
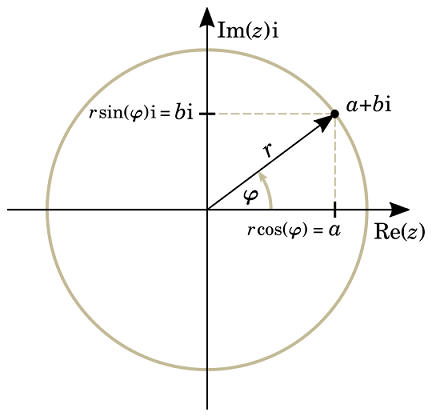
Definuj geometrický tvar komplexních čísel?
Jedná se o tvar, který zdůrazňuje geometrickou interpretaci komplexních čísel. Komplexní císlo z v geometrickém tvaru zapisujeme jako z = r(cos θ + i sin θ), kde
r je absolutní hodnota (modul) komplexního čísla
θ je argument komplexního čísla (úhel s kladnou reálnou osou)
Definuj Eulerův vzorec.
Eulerův vzorec říká, že pro každé reálné číslo x platí, že eix = cos(x) + i sin(x).To je základní vztah mezi exponenciální funkcí a trigonometrickými funkcemi.
Vysvětli, proč platí Eulerův vzorec.
Mějme Taylorův polynom pro eix. V tomto polynomu se střídají členy reálných a imaginárních částí. Pokud u imaginárních částí vytkneme i a současně seskupíme reálné části, dostaneme odhad cosx a sinx, pokud bychom s počtem členů (n) šli k nekonečnu. Tímto způsobem lze ukázat, že exponenciální funkce lze vyjádřit jako kombinaci trigonometrických funkcí.
Jaký je alternativní zápis komplexního čísla v geometrickém tvaru s využitím Eulerova vzorce?
z = reiθ
Co to je de Moivreova věta?
Pro komplexní číslo z = r(cos θ + i sin θ) a přirozené číslo n platí z n = r n (cos(nθ) + i sin(nθ))
Jaké jsou výhody geometrického tvaru?
snadná vizualizace komplexních čísel v komplexní rovině
zjednodušení násobení a umocňování komplexních čísel
přímá souvislost s goniometrickými funkcemi
Jaký má význam násobení komplexního čísla komplexní jednotkou?
Způsobuje rotaci bodu reprezentujícího komplexní číslo kolem počátku komplexní roviny o úhel ϕ.
Mějme komplexní číslo z = r(cos ϕ + i sin ϕ) = reiϕ. Při násobení z komplexní jednotkou u dostaneme uz = (cos θ + i sin θ)(r cos ϕ + ir sin ϕ) = r(cos θ cos ϕ − sin θ sin ϕ) + ir(sin θ cos ϕ + cos θ sin ϕ) = r[cos(θ + ϕ) + i sin(θ + ϕ)] = rei(θ+ϕ)
Co je to komplexní jednotka?
Komplexní jednotka je komplexní číslo s absolutní hodnotou 1. V polárním tvaru ji můžeme zapsat jako u = cos θ + i sin θ = e iθ kde θ je libovolný reálný úhel.
Jaký je geometrický význam násobení i?
Otočení o 90° proti směru hodinových ručiček.
Jaký je geometrický význam násobení -1?
Otočení o 180° proti směru hodinových ručiček.
Jaký je geometrický význam násobení -i?
Otočení o 270° proti směru hodinových ručiček.
Co platí pro význačné prvky tělesa?
Pro sčítání to je 0 a pro násobení to je 1. Musí být různé.
Definuj opačný prvek.
Prvek b ∈ K takový, že a + b = 0, je k danému a ∈ K určený jednoznačně. Tento jednoznačně určený prvek k danému a označujeme −a a nazýváme opačný prvek k a.
Definuj inverzní prvek/převrácenou hodnotu.
Prvek b ∈ K takový, že a · b = 1 je k danému 0 =/= a ∈ K určený jednoznačně – označujeme ho a−1 nebo 1/a.
Jaké jsou vlastnosti těles?
Bud’ K těleso. Potom pro všechna n ∈ N a a, b, c, b1, . . . , bn ∈ K platí
a + b = a + c ⇒ b = c,
(a · b = a · c & a =/= 0) ⇒ b = c
a · 0 = 0
a · b = 0 ⇒ (a = 0 ∨ b = 0)
−a = (−1) · a
a · (b − c) = a · b − a · c
a · (b1 + . . . + bn) = a · b1 + . . . + a · bn.
Co jsou to zákony o krácení?
Bud’ K těleso. Potom pro všechna n ∈ N a a, b, c, b1, . . . , bn ∈ K platí
a + b = a + c ⇒ b = c,
(a · b = a · c & a =/= 0) ⇒ b = c
Vysvětli, jak je možné zavést libovolné celočíselné násobky prvků z tělesa.
Pro a ∈ K, n ∈ N klademe (−n)a = −(na) = n(−a).
Vysvětli, jak je možné zavést libovolné celočíselné mocniny.
Podobně lze pro nenulové prvky tělesa zavést i libovolné celočíselné mocniny. Pro 0 =/= a ∈ K, n ∈ N klademe a −n = (a n ) −1 = (a −1 ) n .
Definuj podtěleso.
Podtěleso tělesa K je jeho podmnožina L, která obsahuje nulu a jedničku a je uzavřená vzhledem ke sčítání, násobení, opačnému a inverznímu prvku.
Nechť K je těleso a L ⊆ K. Říkáme, že L je podtěleso tělesa K, pokud 0, 1 ∈ L a pro všechna a, b ∈ L platí a + b ∈ L, ab ∈ L, −a ∈ L a, pokud a =/= 0, tak i a−1 ∈ L.
Vysvětli pojem charakteristika tělesa.
Jedná se o nejmenší kladné celé číslo n takové, že n1 = 0.
Čemu může být rovna charakteristika tělesa?
∞ nebo prvočíslu
Co platí pro charakteristiku tělesa a jeho podtělesa?
charK = charL
Kdy má těleso charK = ∞ ? Uveď příklad takového tělesa.
Pokud neexistuje takové n, pro které platí n1 = 0, tedy pro každé celé n > 0 platí, že n1 =/= 0. Příklad: N, R, Q, …
Definuj konečná tělesa.
Jedná se o taková tělesa, jejichž charK =/= ∞.
Jaký význam mají konečná tělesa?
V kódování a kryptografii.
Definuj množinu zbytkových tříd modulo n.
Pro každé kladné celé číslo n označme Zn = {k ∈ N | k < n} = {0, 1, . . . , n − 1}. Na této množine zavedeme dvě binární operace – sčítání ⊕ a násobení ⊙, které jsou odlišné od příslušných operací + a · v Z. Pro a, b ∈ Zn klademe
a ⊕ b = zbytek po dělení a + b číslem n
a ⊙ b = zbytek po dělení a · b číslem n.
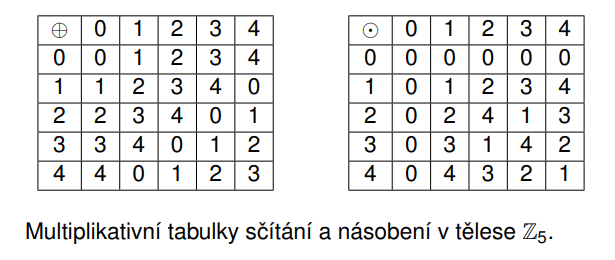
Kdy je množina Zn těleso?
Množina Zn s operacemi ⊕ a ⊙ je těleso právě tehdy, když n je prvočíslo.
Co znamená, že komplexní čísla s operacemi + a i tvoří těleso, které je algebraicky uzavřené?
Každá polynomiální rovnice s komplexními koeficienty má alespoň jedno komplexní řešení.
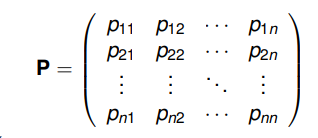
Definuj matici.
Necht’ X je libovolná množina a m, n ∈ N. Maticí typu m × n, nebo též m × n-rozměrnou maticí nad množinou X rozumíme obdélníkovou tabulku A = (aij)m×n nebo A = (aij) (nebo viz foto), sestávající z prvků množiny X.
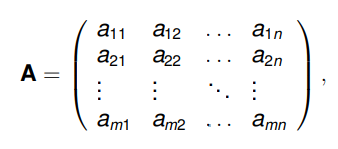
Co znamená aij v kontextu matic?
Jedná se o prvek matice, přičemž 1 <= i <= m a 1 <= j <= n. Jedná se tedy o prvek na i-tém řádku v j-tém sloupci.
Definuj totožné matice.
Jedná se o matice o stejných rozměrech, které mají na příslušných místech shodné prvky.
Definuj prázdnou matici.
Jedná se o matici o rozměru m x n, kdy m nebo n je rovno nule. V takovém případě se množina Xmxn sestává z jediné (prázdné) matice ∅.
Definuj transponovanou matici.
Jedná se o matici, kterou získáme záměnou řádků za sloupce. Je to matice AT ∈ Xn×m, kde prvek na pozici (i,j) se stává prvkem na pozici (j,i).
Jaký je vztah mezi transponovanou maticí a zápisem pomocí řádků/sloupců?
Pro libovolnou matici A ∈ Xm×n a 1 ≤ i ≤ m, 1 ≤ j ≤ n platí si(AT ) = ri (A)T , rj(AT) = sj(A)T.
Definuj symetrickou matici.
Jedná se o takovou matici, jejíž transpozicí získáme totožnou matici.
Definuj diagonálu čtvercové matice.
Jedná se o posloupnost prvků (a11, a22, . . . , ann)-
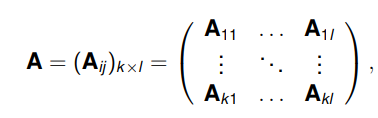
Definuj blokovou matici.
Výsledná matice typu m × (n1 + n2 ) získaná spojením dvou matic. Značíme ji (A, B) nebo (A | B). Podobně lze postupovat u matice se stejným počtem sloupců. Všeobecným zápisem tak můžeme dostat větší systémy matic zapsané ve tvaru: A = (Aij)k×l, přicemž jednotlivé bloky Aij jsou matice nad X rozměrů mi × nj , kde (m1, . . . , mk ), (n1, . . . , nl) jsou nejaké konečné posloupnosti přirozených čísel.
Definuj součet matic.
Pro matice A = (aij)m×n, B = (bij)m×n nad K platí
A + B = (aij + bij)m×n
Definuj násobení matice skalárem.
Pro matice A = (aij)m×n, B = (bij)m×n nad K a c ∈ K platí
cA = (caij)m×n
Definuj neutrální prvek operace sčítání nad Kmxn
Nulová matice, tedy matice typu m × n, jejíž všechny prvky jsou nulové. Označujeme ji 0m,n.
Definuj opačný prvek k matici A
−A = (−aij)m×n
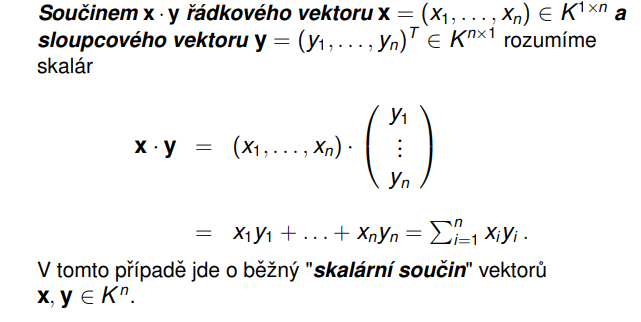
Definuj násobení vektorů.
Pro vektory u = (u1, u2, ..., un) a v = (v1, v2, ..., vn) nad K platí, že násobení vektorů může být definováno jako skalární součin, který je dán vzorcem u • v = u1v1 + u2v2 + ... + unvn.
Jaké jsou vlastnosti násobení dvou vektorů?
Pro všechna n ∈ N, c ∈ K a x, x′ ∈ K1×n , y, y′ ∈ Kn×1 platí
x · (y + y ′ ) = x · y + x · y ′ ,
(x + x ′ ) · y = x · y + x ′ · y,
x · cy = c(x · y) = cx · y,
x · y = yT · xT
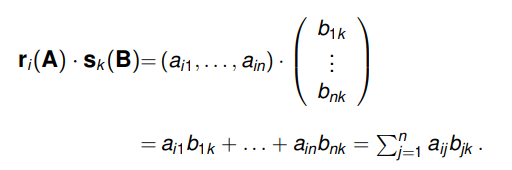
Definuj součin matic.
Nechť m, n, p ∈ N a A = (aij)m×n, B = (bjk)n×p. Součinem matic A, B rozumíme matici
A · B = (ri (A) · sk (B))m×p = viz obrázek
Vysvětli základní Leslieho populační model.
Leslieho model je diskrétní model, který se využívá k predikci velikosti a struktury populace na základě současných demografických údajů. Využívá matici přechodu, která popisuje, jak se populace mění v čase. Platí pro něj:
obsahuje míru přežití a plodnosti pro každou věkovou skupinu
populace jsou rozdělené do diskrétních věkových skupin
předpoklad, že míra přežití a plodnosti je v čase konstantní
Jaká je základní rovnice Leslieho modelu?
n(t + 1) = L · n(t)
n(t) je vektor populačních velikostí v čase t,
L je Leslieho matice,
n(t + 1) je vektor populačních velikostí v čase t + 1
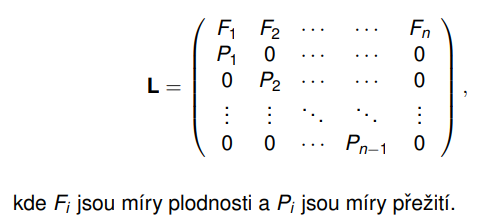
Jaký tvar má Leslieho matice L?
Jaká jsou omezení Leslieho modelu?
předpoklad konstantní míry přežití a plodnosti
nebere v úvahu environmentální variabilitu
ignoruje hustotní závislost a mezidruhové interakce
může být nepřesný pro malé populace kvůli demografické stochasticitě
Jaké jsou vlastnosti násobení matic?
distributivita
asociativita
násobení matic komutuje (je zaměnitelné s operací skalárního násobku)
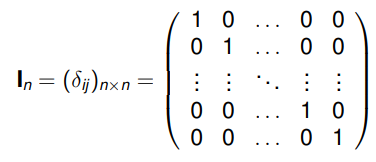
Definuj jednotkovou matici řádu n.
In = (δij)n×n
Jakou roli hraji jednotkové matice?
Role neutrálního prvku násobení.
Definuj mocniny čtvercových matic.
Pro A ∈ Kn×n , klademe A0 = In a Ak = A · . . . · A (k-krát) pro 0 < k ∈ N
Vysvětli obecně Markovův proces.
Jedná se o stochastický proces, který splňuje Markovovu vlastnost, tedy že budoucí stav závisí pouze na současném stavu, nikoliv na historii stavů.
Formuluj rovnici pro Markovův proces s diskrétním časem a konečným stavovým prostorem.
Nechť (Xt ) t∈T je Markovův proces s diskrétním časem a konečným stavovým prostorem S = {s1, s2, . . . , sn}. Lineární model pro tento proces je dán p(t + 1) = Pp(t), kde:
p(t) = (p1(t), p2(t), . . . , pn(t))T je vektor pravděpodobností stavů v čase t,
P = (pij) je matice přechodových pravděpodobností.
Jak vypadá matice přechodových pravděpodobností?
pij reprezentuje pravděpodobnost přechodu ze stavu sj do stavu si, přičemž platí, že součet pravděpodobností ve sloupci musí být roven 0.
Co je to ergodický Markovův řetězec? Uveď příklad.
Speciální typ Markovova řetězce, kde se systém v dlouhodobém horizontu dostane do jakéhosi rovnovážného stavu, a to nezávisle na svém výchozím stavu. Příkladem může být házení kostkou.
Co platí pro ergodický Markovův řetězec? (matematicky)
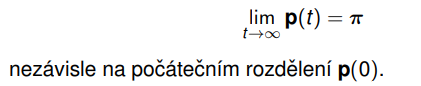
Kde se Markovův proces využívá?
analýza finančních trhů
modelování biologických systémů
simulace různých systémů
zpracování přirozeného jazyka
predikce počasí
algoritmus pro simulaci a strojové učení
Definuj inverzní matici.
Inverzní matice existují pouze ke čtvercových maticím. Taková libovolná čtvercová matice A ∈ Kn×n bude mít nanejvýš jednu inverzní matici B ∈ Kn×n tak, že platí A · B = In = B · A
Jaké jsou vlastnosti inverzní matice?
Necht’ A, B ∈ Kn×n jsou regulární matice. Potom i matice A−1 , A · B a AT jsou regulární a platí:
(A−1)−1 = A,
(A · B)−1 = B−1 · A−1 ,
(AT)−1 = (A−1)T
Definuj singulární a regulární matici.
Čtvercová matice A ∈ Kn×n je regulární, pokud k ní existuje inverzní matice A-1. Pokud taková matice neexistuje, mluvíme o singulární matici.
Definuj ERO.
Necht’ A ∈ Km×n . Necht’ matice B ∈ Km×n vznikne z A provedením jedné ERO. Označme E matici, která vznikne z matice Im provedením stejné ERO. Potom B = E · A.
Definuj ESO.
Necht’ A ∈ Km×n . Necht’ matice C ∈ Km×n vznikne z A provedením jedné ESO. Označme F matici, která vznikne z matice In provedením stejné ESO. Potom C = A· F.
Definuj elementární matici.
Jedná se o čtvercovou matici E ∈ Kn×n, které vzniknou z jednotkové matice In provedením jediné ERO nebo ESO.
Jaký je rozdíl mezi zleva elementární maticí a zprava elementární maticí?
zleva - vznikla provedením ERO
zprava - vznikla provedením ESO
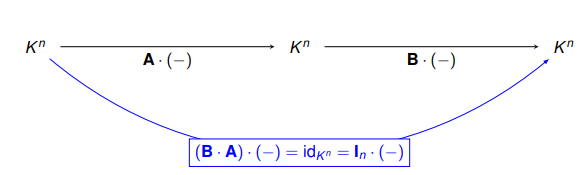
Jak na výpočet inverzní matice pomocí ERO?
Necht’ A ∈ Kn×n a E1, E2, . . . , Ek ∈ Kn×n jsou elementární matice tak, že Ek · . . . · E2 · E1 · A = In. Potom A−1 = Ek · . . . · E2 · E1.
Kdy jsou matice řádkově nebo sloupcově ekvivalentní?
Pro libovolné A, B ∈ Km×n platí:
A je řádkově ekvivalentní s B (A ∼ B) právě tehdy, když existuje regulární matice P ∈ Km×m tak, že A = P · B;
A je sloupcově ekvivalentní s B (A ≀ B) právě tehdy, když existuje regulární matice Q ∈ Kn×n tak, že A = B · Q.
Definuj LU-rozklad.
LU-rozklad matice A je faktorizace matice na součin dolní trojúhelníkové matice L (Lower) a horní trojúhelníkové matice U (Upper) tak, že platí A = LU, kde:
A je čtvercová matice řádu n,
L je dolní trojúhelníková matice s jednotkami na diagonále,
U je horní trojúhelníková matice.
Jaké je využití LU rozkladu?
Strojové učení:
Řešení soustav normálních rovnic v metodě nejmenších čtverců
Výpočet inverzních matic v různých algoritmech
Grafické aplikace:
Transformace souřadnic
Řešení problémů souvisejících s geometrií
Inženýrství:
Analýza konstrukcí
Simulace proudění tekutin
Ekonomie:
Ekonomické modelování
Optimalizace portfolia
Jak zní věta o LU-rozkladu?
Nechť A je regulární matice rádu n, u které při Gaussově eliminaci nemusíme prohazovat řádky. Pak existují regulární matice L a U řádu n, pro které platí A = LU, L je dolní trojúhelníková matice s jednotkami na hlavní diagonále, U je horní trojúhelníková matice s nenulovými prvky na hlavní diagonále. Matice L a U jsou těmito podmínkami určené jednoznačně.
Jak lze řešit soustavu rovnic pomocí LU-rozkladu?
Provedení LU-rozkladu matice koeficientů
Řešení soustavy Ly = b pro y
Řešení soustavy Ux = y pro x
Kdy je užitečné řešit soustavu rovnic LU rozkladem?
Máme soustavu rovnic se stejnými koeficienty, ale s odlišnými pravými stranami.
Jaký je výpočet inverzní matice pomocí LU rozkladu?
LU rozklad matice A
Řešení soustavy pro každý sloupec jednotkové matice (musíme vyřešit AX = I, to znamená, že Axi = ei, kde xi je i-tý sloupec A-1
Sestavení inverzní matice
Jaká je geometrická interpretace vektoru?
V prostoru vektory představujeme jako orientované úsečky (s počátečním a koncovým bodem).
Co je potřeba k tomu, aby byla úsečka umístěním nějakého vektoru?
Musí se jednat o stejný vektor, tedy musí být s původním vektorem rovnoběžná, stejně dlouhá a stejně orientovaná.
Jak sčítáme vektory?
Mějme dva vektory v rovině u = (u1, u2 ) ∈ R2 , v = (v1, v2 ) ∈ R2. Pro jejich součet platí u + v = (u1, u2 ) + (v1, v2 ) = (u1 + v1, u2 + v2 ). Geometricky se jedná o sčítání pomocí vektorového rovnoběžníku.
Jak násobíme vektory skalárem?
cu = c(u1, u2 ) = (cu1, cu2 ) pro c ∈ R, u = (u1, u2 ) ∈ R2
Definuj vlastnosti tělesa (matematickým zápisem).
{0, 1} ∈ K, 0 ̸= 1
operace ⊕, ⊙
(∀a, b ∈ K)(a + b = b + a), (∀a, b ∈ K)(a · b = b · a), (komutativita)
(∀a, b, c ∈ K)(a + (b + c) = (a + b) + c), (∀a, b, c ∈ K)(a · (b · c) = (a · b) · c), (asociativita)
(∀a ∈ K)(0 + a = a), (neutrální prvek sčítání)
(∀a ∈ K)(1 · a = a), (neutrální prvek násobení)
(∀a ∈ K)(∃ b ∈ K)(a + b = 0), (opačný prvek)
(∀a ∈ K ∖ {0})(∃ b ∈ K)(a · b = 1), (inverzní prvek)
(∀a, b, c ∈ K)(a · (b + c) = (a · b) + (a · c)), (distributivita)
Definuj vektorový prostor.
Bud’ K (číselné) těleso. Vektorovým nebo též lineárním prostorem nad K nazýváme množinu V s význačným prvkem 0 a dvěma binárními operacemi – sčítáním +: V × V → V a násobením: K × V → V – takovými, že platí
(∀x, y, z ∈ V)(x + (y + z) = (x + y) + z)), (asociativita sčítání)
(∀x, y ∈ V)(x + y = y + x), (komutativita)
(∀x ∈ V)(x + 0 = x), (neutrální prvek sčítání)
(∀x ∈ V)(∃y ∈ V)(x + y = 0), (opačný vektor)
(∀a, b ∈ K)(∀x ∈ V)(a · (b · x) = (ab) · x), (asociativita násobení skalárem)
(∀x ∈ V)(1 · x = x),
(∀a ∈ K)(∀x, y ∈ V)(a · (x + y) = (a · x) + (a · y)), (distributivita)
(∀a, b ∈ K)(∀x ∈ V)((a + b) · x = (a · x) + (b · x)) (distributivita)
Jaký je rozdíl mezi axiómy vektorového prostoru a vlastnostmi (číselného) tělesa?
Násobení v číselném tělese K je binární operací na množině K (tj. zobrazení K x K → K). Násobení ve vektorovém prostoru V nad číselným tělesem K není binární operací na V, ale na K x V → V.
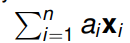
Definuj lineární kombinaci vektorů.
Lineární kombinace představuje postup, jak z určité množiny vektorů sestavit nový vektor jen pomocí sčítání a násobení. Mějme vektory x1, x2, …, xn ∈ V, kde V je vektorový prostor a koeficienty a1, …, an ∈ K. Lineární kombinací získáme vektor v = a1×1 + … + anxn.
Definuj polynom nad tělesem.
Polynomem f stupně n, kde −1 ≤ n ∈ Z v proměnné x nad tělesem K rozumíme formální výraz tvaru f(x) = a0 + a1x + . . . + an−1xn−1 + anxn kde a0, a1, ..., an ∈ K jsou skaláry (koeficienty) polynomu f a an =/= 0.
Definuj lineární zobrazení.
Necht’ U, V jsou vektorové prostory nad tělesem K. Říkáme, že φ: V → U je lineární zobrazení, pokud φ zachovává operace vektorového součtu a skalárního násobku, tj. pokud pro libovolné x, y ∈ V, c ∈ K platí φ(x + y) = φ(x) + φ(y), φ(cx) = cφ(x)
Jaké jsou vlastnosti lineárního zobrazení?
φ: V → U a x ∈ V platí φ(0) = 0, φ(−x) = −φ(x)