Lecture 2 - Multisensory integration
1/32
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
33 Terms
sensory conflicts
-different sense might provide conflicting information about a sensory stimulus
-this conflict needs to be resolved
mcgurk effect
-audio never changes
-video shows pronunciation of different syllables
-what we hear depends on what we see
-affects auditory perception of what is actually heard
example of mcgurk effect
-person says var var throughout
-at beginning pronounce different syllables → var, dar, bar
-can see that these are pronounced differently by tracking their mouth movements to help us understand and this overrides the audio we hear
-so the audio is the same but the visual feedback changes
-so visual system is dominant
sensory uncertainty
-occurs due to:
perceptual limits
neural noise
cognitive resources
perceptual limits (sensory uncertainty)
-senses can pick up certain information but not other information
-may not pick up enough information to make certain decision
-only so many things we can pay attention to at any given moment
-limits what information comes through and may not able to use all information we receive
rock & victor - method (testing conflicts between vision and touch)
-asked to judge the size of object by vision and touch
-setup:
manipulate object to look small (vision)
could feel the object - felt bigger than looked
-so had to judge the size of the object but mismatch between visual and haptic feedback
rock & victor - results (testing conflicts between vision and touch)
-conflict between visual and touch tells us whether people depend more on haptic feedback or visual feedback
-found generally followed sense of vision → visual capture
shams - method (is there a strict sensory hierarchy)
-asked to report number of visual flashes
-at the same time an auditory distractor was played
-auditory feedback does not matter for the task
→ do not need to integrate information between visual and auditory information but if they did would support automaticity of body schema
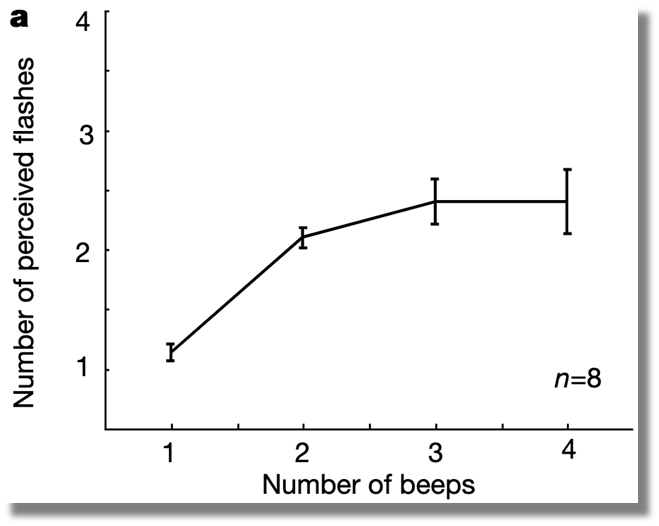
shams - results (is there a strict sensory hierarchy)
-found the number of auditory beeps determines reported number of visual flashes
-more closely followed auditory perception over visual perception
-on graph correct answer was always 1 → if show single flash and more beeps the number of flashes people report increases
modality precision hypothesis
-modality with the highest precision/lowest uncertainty is chosen depending on the task:
spatial task use vision
temporal task use audition
ernst - method (changing precision of sensory modality)
-asked to judge height of the bar
-virtual reality set-up
-could touch bar with two fingers to get estimate (haptic feedback)
-could also see the bar (visual feedback)
-introduce discrepancy between different modal inputs by changing the visual and tactile uncertainty independently
ernst - vision method (changing precision of sensory modality)
-change height of the bar
-modify uncertainty by adding visual noise → decreasing the quality of the sensory feedback
-making virtual bar more blurry to see if they still rely on visual feedback as much
ernst - haptics method (changing precision of sensory modality)
-force feedback device
-change height of bar
-robot arm locks into place in certain position, similar to as if people were bumping into a given object
-depending on the position where the robot locked in place
→ then modify the height of the bar that people are perceiving
ernst - analysis (changing precision of sensory modality)
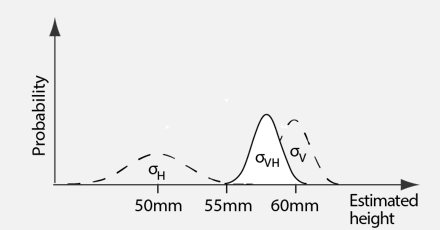
-compare against bar without sensory conflict (55mm tall)
-determine point of subjective equivalent (PSE)
-manipulate sensory uncertainty of visual feedback
-set experiment so discrepancy between modalities:
haptic feedback tells participant the bar is 50mm tall
visual feedback tells participant the bar is 60mm tall
-set bar at 55mm → so if people trust haptic feedback more they will say the bar is shorter and if they trust visual feedback more will say the bar is taller
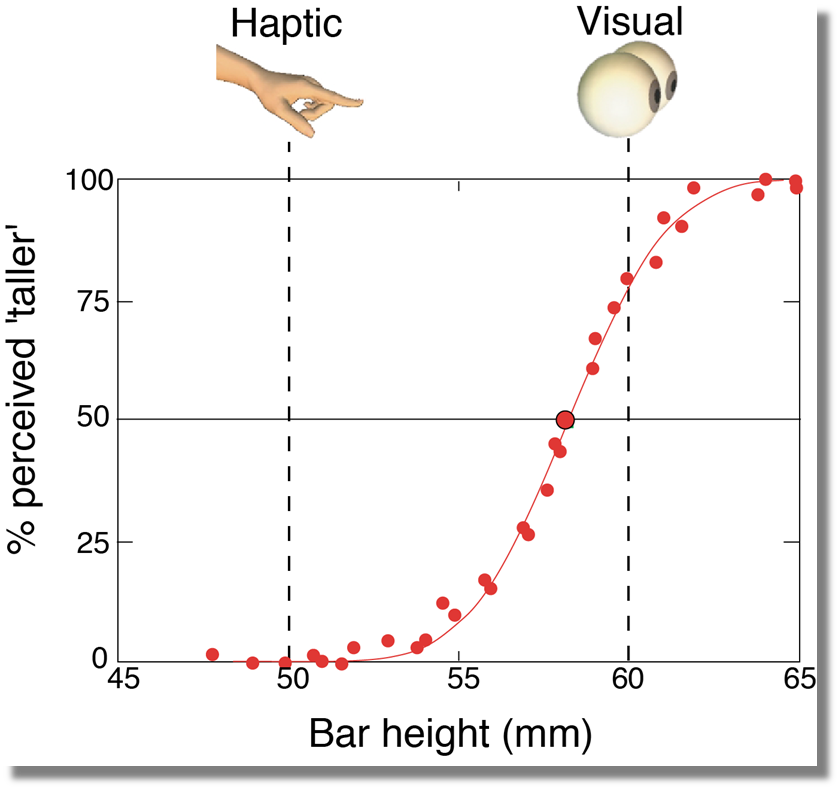
ernst - no added visual noise results (changing precision of sensory modality)
-perception of bar heigh biased towards visual input
-50% line is subjective ambivalence → both bars have exactly same height as people are unsure which bar is taller and cannot distinguish between the height of two bars
ernst - added visual noise results (changing precision of sensory modality)
-blue curve → perception of bar height not determined by both visual and haptic inputs
-clearly shifted to the left, point of subjective equivalence is almost exactly in the middle of visual and haptic bar height
-visual dominance appears to have disappeared simply by degrading quality of visual sensory feedback
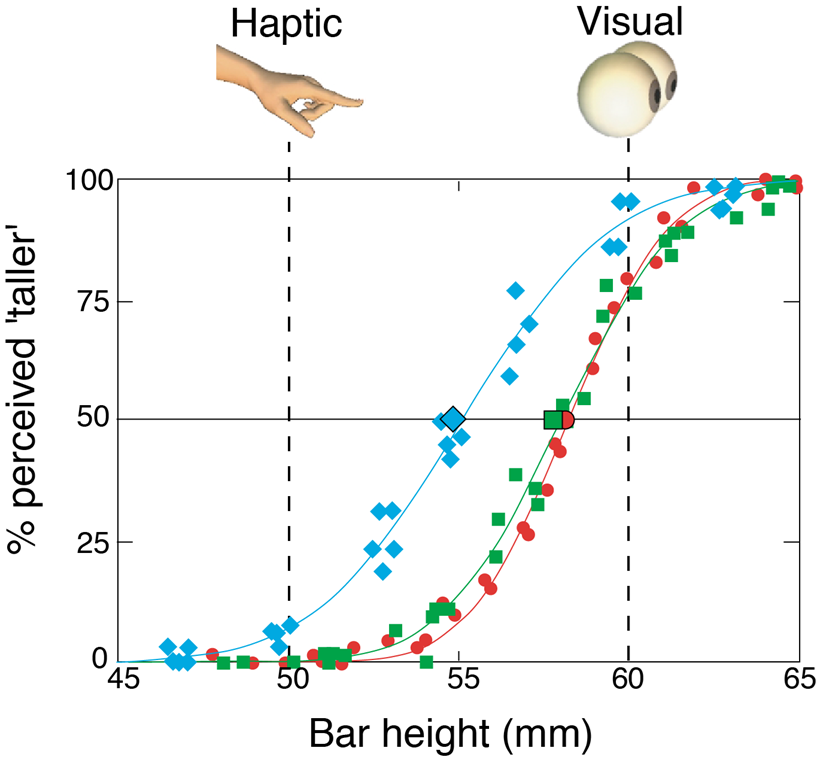
ernst - high visual noise results (changing precision of sensory modality)
-yellow curve
-perception of bar height not determined by haptic inputs
-people mostly rely on haptic feedback and almost no reliance on visual feedback
ernst - conclusion (changing precision of sensory modality)
-suggests strict hierarchy between different senses
-brain takes into account momentary uncertainty in sensory feedback and provides combination where most influenced by the sense that gives us the most reliable information at that time
normative model
-how a problem should be solved
-the optimal solution
-based on theory
-can establish bounds → best that can be done
process model
-how a problem is actually solved
-based on data
normative model for sensory integration
-integration methods can have different levels of integrated uncertainty
-pick integration model that minimizes sensory uncertainty by combining different sensory signals in a way with smallest level of uncertainty
-two different sources of input - haptic + visual
-integrated into signal that reflects a final judgement about sensory stimulus we are experiencing
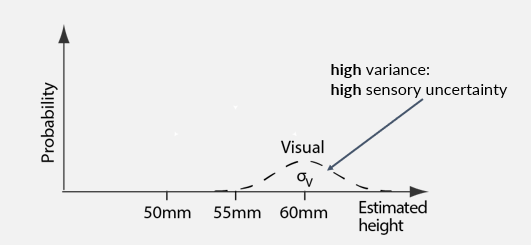
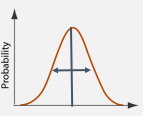
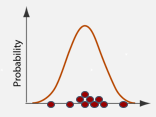
integrating probabilities - high variance (blurred stimulus)
-bar is 60mm tall
-probability distribution centred at value of 60mm → true value that sensory feedback is telling us
-distribution has some variance → reflects variance and uncertainty we have with visual feedback
-can give us best guess and can be used to quantify uncertainty we experience
distribution is relatively broad → high variance and high sensory uncertainty
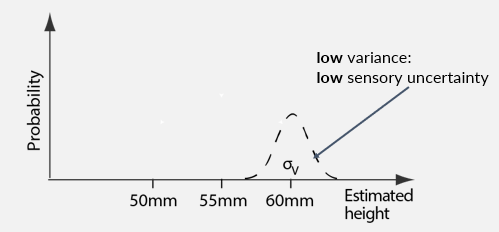
integrating probabilities - low variance
-bar is 60mm tall
-not as broad, sharper
-removing blur from visual feedback
-low sensory uncertainty and low variance
-more extreme values not as likely and can be discarded
-high confidence in what vision can tell us when stimulus is not blurred
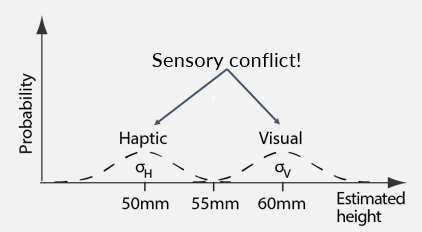
integrating probabilities - sensory conflict (blurred stimulus)
-integrating from different sensory modalities
-what is felt haptically is shown at 50mm
-what is felt visually is shown at 60mm
two different distributions - deliberately introduced mismatch in experiment
-now have their own uncertainty with each distribution
-normative model tells us that integration should be proportional to uncertainty in two signals → helps to resolve conflict
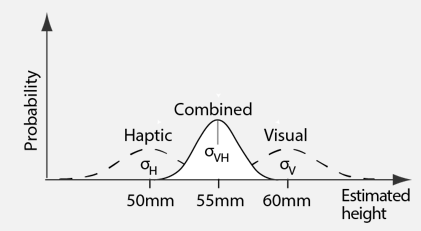
integrating probabilities - combined estimate (blurred stimulus)
-combined estimate of both visual and haptic feedback has lower uncertainty/smaller variance than either estimate alone
narrower and more peak on graph
-normative model predicts this is how we should act
-likely why we integrate across our senses → helps reduce overall uncertainty in sensory estimations
-adding more sources of information to a signal helps improve certainty of final estimate
integrating probabilities - combined estimate (unblurred stimulus)
-back to sharp signal
-low associated uncertainty in visual signal
-haven’t changed anything about haptic signal which still has high variance and uncertainty
-combined estimate is biased towards the visual estimate → as this has lower uncertainty than the haptic estimate
-more reliable signal weighted more highly than the unreliable signal when combining the two → doesn’t ignore worse signal
-theory predicts would make use of all available information and should always integrate even if signals have high uncertainty → still helps narrow down sensory uncertainty
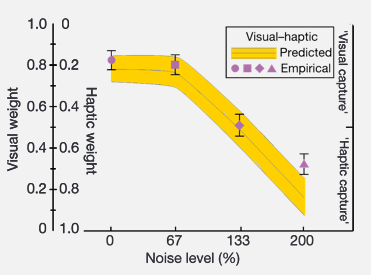
human performance vs MLE
-on left axis is visual weight - if trust vision completely at 1 would then not trust haptic at 0 and vice versa
-x axis is is changing noise level of visual feedback
-pink points are empirical data points from Ernst experiment → show that with less noise trust vision more → see a steep change in trusting haptic feedback more when visual feedback is blurred
-if people integrating information in the best way pink dots would follow yellow line
-yellow line is prediction from normative model → shows human integration follows sensory rules about what is most effective
-not followed precisely meaning maths regarding probabilities needs to be integrated into the brain as there is a close match between theory and what is actually done
do we always integrate information optimally?
need to know uncertainty for optimal integration
-can be be hard to estimate
-easier in sensory perception than cognitive reasoning
calculations can be intractable or take a long time
-heuristics are suboptimal but fast
-good enough solutions often satisfactory
are probabilities encoded in the brain?
-uncertainty needs to be represented in some way
-little direct electrophysiological evidence, but several plausible schemes proposed
mean and variance (probabilities encoded in the brain)
-mean to keep track of best guess
-variance to figure out what integration should be
full distribution (probabilities encoded in the brain)
-keep track of full distribution
-different neurons that take care of different parts of distribution
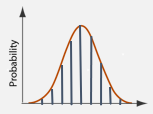
samples (probabilities encoded in the brain)
-take random values from distribution
-this estimates probability distribution
-middle between mean/variance and full distribution
correspondence problem
-assume always want to integrate across senses but may not always be the case
-mismatch between what visual and audition tells us
-each will integrate between visual and audition - where is dog located
-could be that both senses are correct and there are two dogs - one dog can see and one dog can hear → dog you see is silent and dog you hear is hidden → so have two dogs and don’t want to integrate across different senses
-seeing a dog and hearing a meow → should integrate across different senses or is this two distinct objects?