FANUC Basic MH (Mat Handling) Cert JUMBO
1/171
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
172 Terms
A six (6) axis robot has how many degrees of freedom?
360
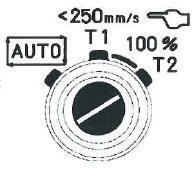
Mode Select Switch - Select correct item for the given definition: Full program speed, and override can be changed to 100%
T2 MODE
Location values (X Y Z W P R) can be copied by using what keyboard combinations? (Simulation Software)
CTRL + Right mouse
Parts must be added to a what in order to use a part? (Simulation Software)
Fixture
When a part is added to the workcell, it is automatically placed on a what? (Simulation Software)
Part Rack

What is the keyboard combo for this icon? (Simulation Software)
Shift + CTRL + ALT

What is the keyboard combo for this icon? (Simulation Software)
CTRL + ALT

What is the keyboard combo for this icon? (Simulation Software)
Shift + CTRL

What is this icon? (Simulation Software)
Move Retry

What is this icon? (Simulation Software)
Cell Browser
What key combinations allow you to rotate the workcell view around the selected object? (Simulation Software)
RIGHT drag mouse
After a workcell has been created, what properties page allows you to add additional robot options to the robot? (Simulation software)
Robot Options
When backing up an image, what 2 keys are pressed on the Teach Pendant when powering up the controller?
F1 - F5
When should a file backup be made?
Changes made to a program
Which backup type will backup F-ROM and S-RAM controller memory modules?
Image Backup
What is the syntax in the program instruction to Turn Off robot I/O?
RO [#] = OFF
Where is Position Register (PR[]) data valid?
Global
What symbol is used to indicate that the robot is at the taught position?
@
Identify the motion instruction elements: What does the “Arc Start [5]” mean?: J P[1] 100% FINE Arc Start [5]
Motion options
Identify the motion instruction elements: What does the “FINE” mean? “J P[1] 100% FINE Arc Start [5]”
Termination type
Identify the motion instruction elements: What does the “100%” mean? “J P[1] 100% FINE Arc Start [5]”
Speed
Identify the motion instruction elements: What does the “P[1]” mean?: “J P[1] 100% FINE Arc Start [5]”
Position type
Identify the motion instruction elements: What does the “J” mean?: “J P[1] 100% FINE Arc Start [5]”
Motion type
Fine termination type causes the robot to what at the destination position before moving to the next position?
stop
To use the cycle start button from the SOP (Standard Operator Panel), which of the following setup modes does the Remote/Local need to be set at within the System/Config screen?
Local
To step through a program, what status indicator light needs to be on?
STEP
What key combination is pressed to touch up a point?
SHIFT - F5
What keys are pressed to change the default motion?
F1 (ED_DEF), F4 (CHOICE)
What key combination is used to record a program point?
SHIFT - F1
Within the program, what does the Group Mask represent when it displays the following? [1,*,*,*,*]
Only 1 motion group assigned
To create a program, what teach pendant key is pressed when the robot is on?
SELECT
Motion Group defines different groups of _ that can be used for independent pieces of equipment.
axes
This copy command will add lines exactly as they were copied but leaves position numbers blank.
F2 - LOGIC
This copy command will add lines exactly as they were copied and retains the current position.
F3 - POS ID
This copy command will add lines exactly as they were copied and renumbers the copied positions with the next available position number.
F4 - POSITION
Name the 3 methods of defining a USER frame
3 Point, 4 Point, Direct Entry method
A _ teach pendant point is a recording of the TCP (tool center point) in relation to the frame.
USER
The 6 point method defines the location and ___ of the tool frame when the values cannot be measured and directly entered.
orientation
If you had to place an object at a 45 degree angle, what coordinate would assist in accomplishing this move?
TOOL
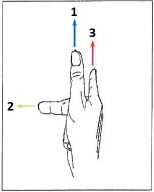
Match the numbers to the axes when doing the “Right Hand Rule”.
X = 3, Y = 2, Z = 1
What Frame is the robot’s default?
World
To control the wrist of the robot, 3 more axes are required. Select them.
yaW, Pitch, Roll
3 axes are required to reach any point in space (X,Y,Z). “X” axis becomes forward and backward movement. “Y” axis becomes a side to side movement. “Z” is the up and down movement. This point in space defines the _.
location
Which 2 ways can you control the robot’s motion limits/boundaries?
Axis Limits - Limit Switches
When a DCS error occurs, what 2 keys do you press in order to clear the fault?
SHIFT - RESET
What key do you press to change the Coordinates to jog in JOINT mode?
COORD
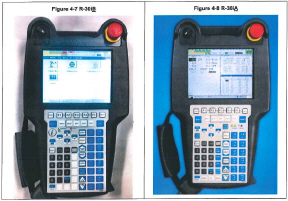
What is different between an R-30iB Teach Pendant jog keys and an R-30iA?
there are 4 more
Using a 3 position Deadman switch, which position allows you to jog the robot?
middle
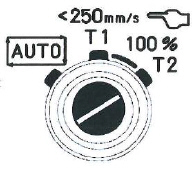
Mode Select Switch - Select correct item for the given definition: Robot operated at the maximum speed. Cannot start programs using the teach pendant.
AUTO
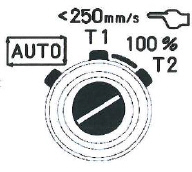
Mode Select Switch - Select correct item for the given definition : Cartesian speed is less than 250 mm/sec and Joint speed is less than 10% of the maximum override speed.
T1 MODE

Match the circled item to the correct answer.
Power

Match the circled item to the correct answer.
Cycle Start

Match the circled item to the correct answer.
Emergency Stop

Match the circled item to the correct answer.
Fault Reset

Match the circled item to the correct answer.
Fault
Which term best describes the full work envelope of a robot?
Maximum Space
What occurs when an Emergency Stop button is pushed?
Dynamic Braking
When prioritizing the safety of your robotics system, the #1 consideration should always be .
people
What defines the motion range of a robot?
Axis limits software settings
How are robot motion restrictions typically implemented?
Installing hard stops beyond software limits
What happens if a calibrated robot exceeds its motion range limits based on software settings?
Software stops the motion
How are axis limits software settings adjusted on a robot?
Changing the values in the controller menu
What does COG stand for in relation to robot payload?
Center of Gravity
What does Inertia refer to in robot payload settings?
Mass distribution
What does the notifications icon indicate on a teach pendant screen?
Incomplete payload setup
What does mastering a robot involve?
Syncing mechanical and positional info
How is robot mastering data maintained when the controller is shut down?
Through batteries
How is robot calibration performed at startup?
Automatically retrieving pulse coder readings
What is the purpose of setting axis limits on a robot?
To prevent overtravel and ensure safety
How do overtravel switches contribute to robot safety?
They prevent the robot from moving beyond limits
What does the term “hard stops” refer to in robot motion control?
Physical barriers to limit robot movement
Why should axis limits not be the sole method for restricting robot motion?
To avoid injury or equipment damage
What is the significance of COG in relation to robot payload handling?
Indicates the balance point of the payload
How does Inertia affect robot payload?
Influences the resistance to changes in motion
What is the purpose and significance of the Arm Load info in robot setup?
Accounts for additional mass and enhances robot motion control
What is the def password for FANUC arms?
1111
What is payload?
Amount of weight attached to the robot EOA
What is the total working area of the robot called?
Work Envelope
DEFINITION: This instruction is similar to a MACRO Command Instruction. It is used to execute subroutines in a program.
CALL Instruction
How many timers do you have access to in the robot?
20
What form of representation uses J1-J6 and shows axis degrees as its form of measurement?
JOINT
What is one benefit of using PR, Offsets?
The programmer does not have to touch up as many points
If you apply a PR, Offset of 300mm in the +Z direction, what direction will the robot move if the robot is referencing the WORLD Frame?
300mm directly up
Which of the following instructions is NOT a timer instruction?
TIMER COMPLETE
What miscellaneous instruction is used to display a comment for the operator to see on the USER Screen?
MESSAGE
If you apply a PR, Offset of 50mm in the +X direction, what direction will the robot move if the robot is referencing the WORLD Frame?
50mm directly forwards
Under what menu can you find the position registers menu?
DATA
Typically, what robot position should be recorded in PR[1]?
Robot Home Position (Master Pos)
What miscellaneous instruction can be used to change or set the overall robot speed?
OVERRIDE
How many position registers are able to be used from factory default?
100
Unused/ Untaught position registers are represented by what symbol?
*
What miscellaneous instruction should you use if you want to track cycle time?
TIMER
What instruction below is an example of a Message?
[. . .]
What frame does a Position Register reference if there is an active user frame being used by the robot?
USER (for PR)
What branching instruction would you use if you wanted the robot to run a sub-routine program?
CALL
What is the main function of a DATA register?
a DATA Register is a storage space for numerical values.
Which of the following is the correct way to create a counter using branching instructions?
R[3]=R[3]+1
How many math instructions can you use when creating a mixed logic instruction with a Register?
5
What two math instructions can you NOT mix with addition and subtraction in a mixed logic statement?
Multiplication, Division
What miscellaneous instruction is used to describe different parts (highlighted yellow) or operations of a program?
REMARK