CE 203 - Geomatics Exam 1
1/84
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
85 Terms
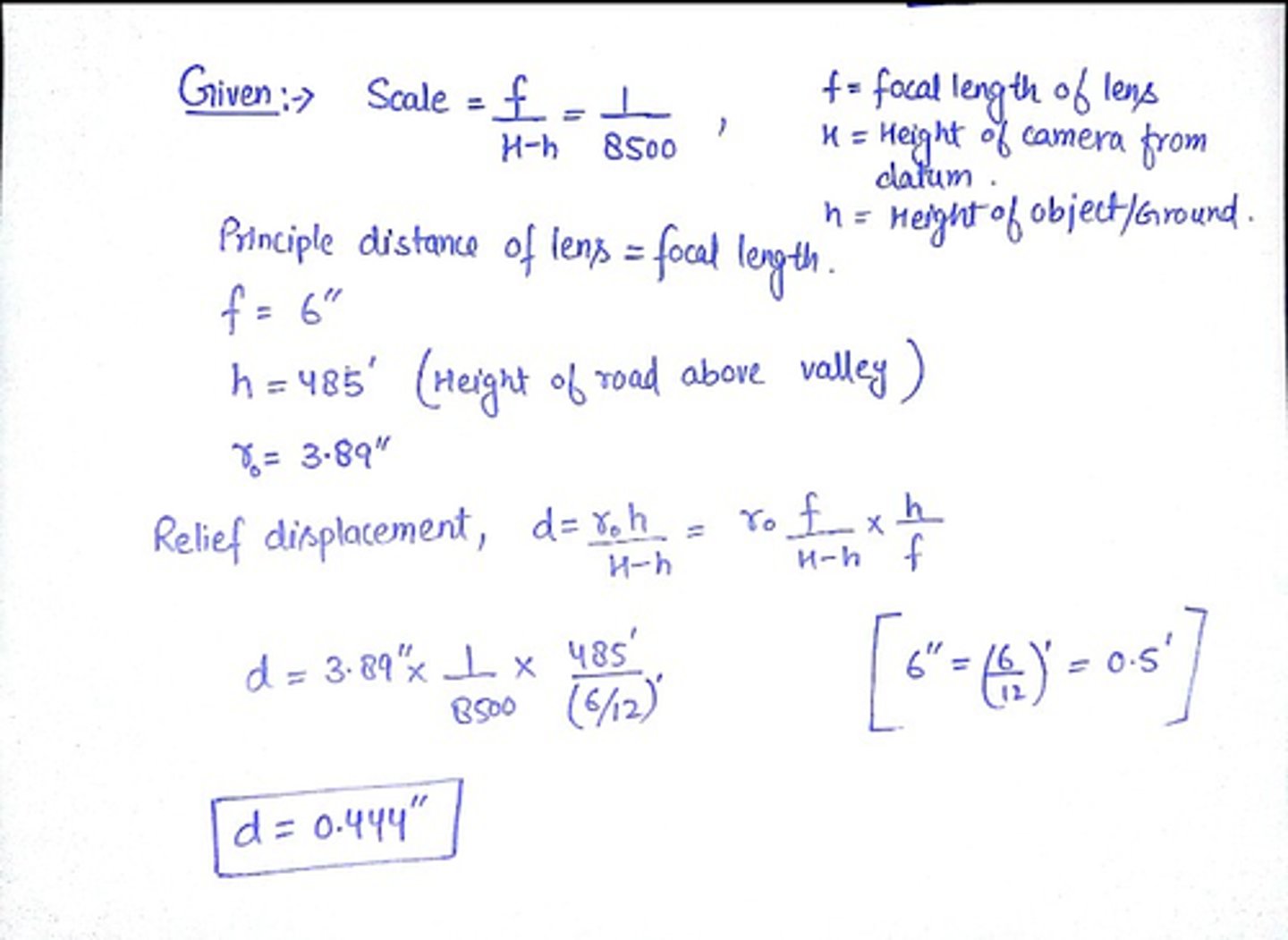
At the bottom of a valley, the scale of a vertical photograph is 1:8000. The focal length of the lens used to capture the photograph is 6". A road intersection on the same photograph is 495 ft above the valley floor and 3.99" from the principal point.
What is the relief displacement of the road intersection with respect to the bottom of the valley?
on paper
Why are remote sensing image data values recorded in integer digital numbers (DNs)?
in order to extract useful information from the image.
What is the difference between DNs and radiance?
Digital Number (DN): Integer number related to intensity.
No physical meaning
-Include effects of surface reflectance, solar irradiance, atmospheric scattering and absorption, topographic effects, instrument noise
-Conversion to scientific units requires sensor calibration
Radiance: def: the radiant flux per unit solid angle leaving an extended source (of area A) in a given direction per unit projected surface area in that direction
A spectral radiance measurement expresses radiance as a function of wavelength or frequency.
What is the difference between radiance and reflectance?
Radiance is the variable directly measured by remote sensing instruments and has units of watt/(steradian/square meter).
Reflectance is the proportion of the radiation striking a surface to the radiation reflected off of it, and it is dimensionless.
Describe the differences between low and high-pass spatial filters.
A high-pass filter (HPF)
-De-emphasizes large-area changes in brightness.
-Emphasizes local detail.
-enhances edges
-eliminates low frequency information
(tool for sharpening an image).
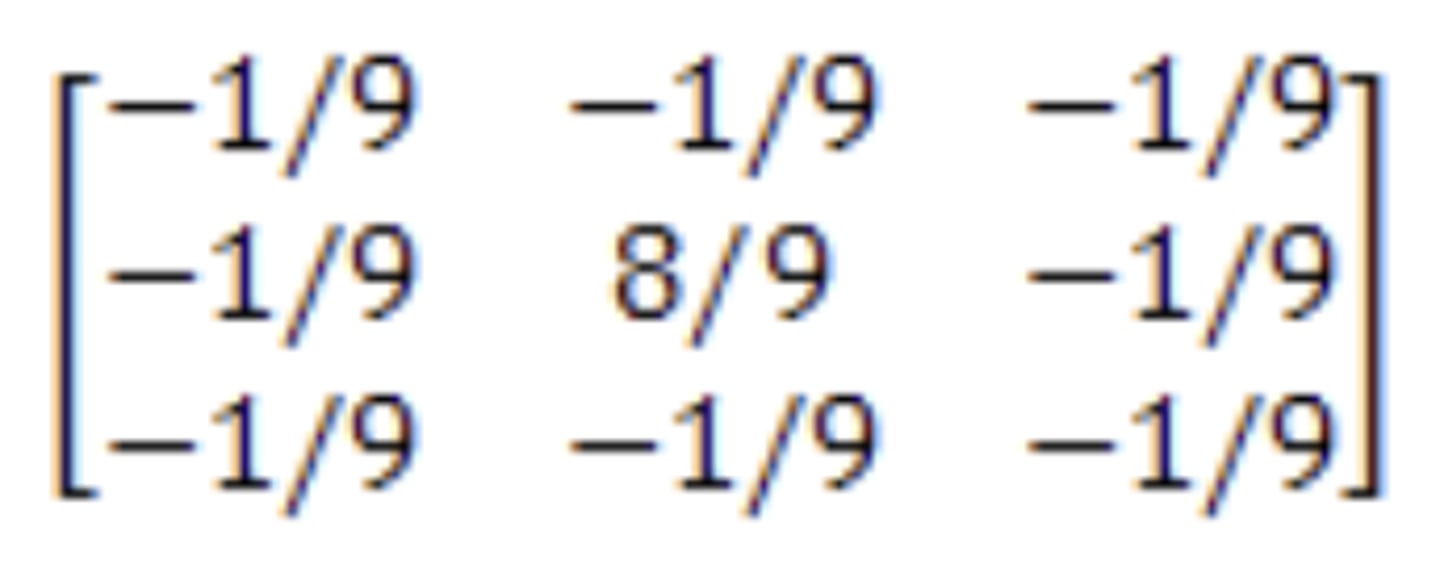
The kernel of the high pass filter is designed to increase the brightness of the center pixel relative to neighboring pixels
ex: (image)
A low-pass filter (LPF)
-Passes the low frequency information
-Emphasizes large-area changes in brightness.
-De-emphasizes local detail and smoothes noise
-reduces noise
ex: an array of ones divided by the number of elements within the kernel (1/9 in 3x3)
Define "unsupervised" and "supervised" classification in the context of analysis of remotely sensed data.
In unsupervised classification, it first groups pixels into “clusters” based on their properties. Then, you classify each cluster with a land cover class. Overall, unsupervised classification is the most basic technique. Because you don’t need samples for unsupervised classification, it’s an easy way to segment and understand an image.
1. Generate clusters
2. Assign classes
In supervised classification, you select representative samples for each land cover class. The software then uses these “training sites” and applies them to the entire image.
1. Select training areas
2. Generate signature file
3. Classify
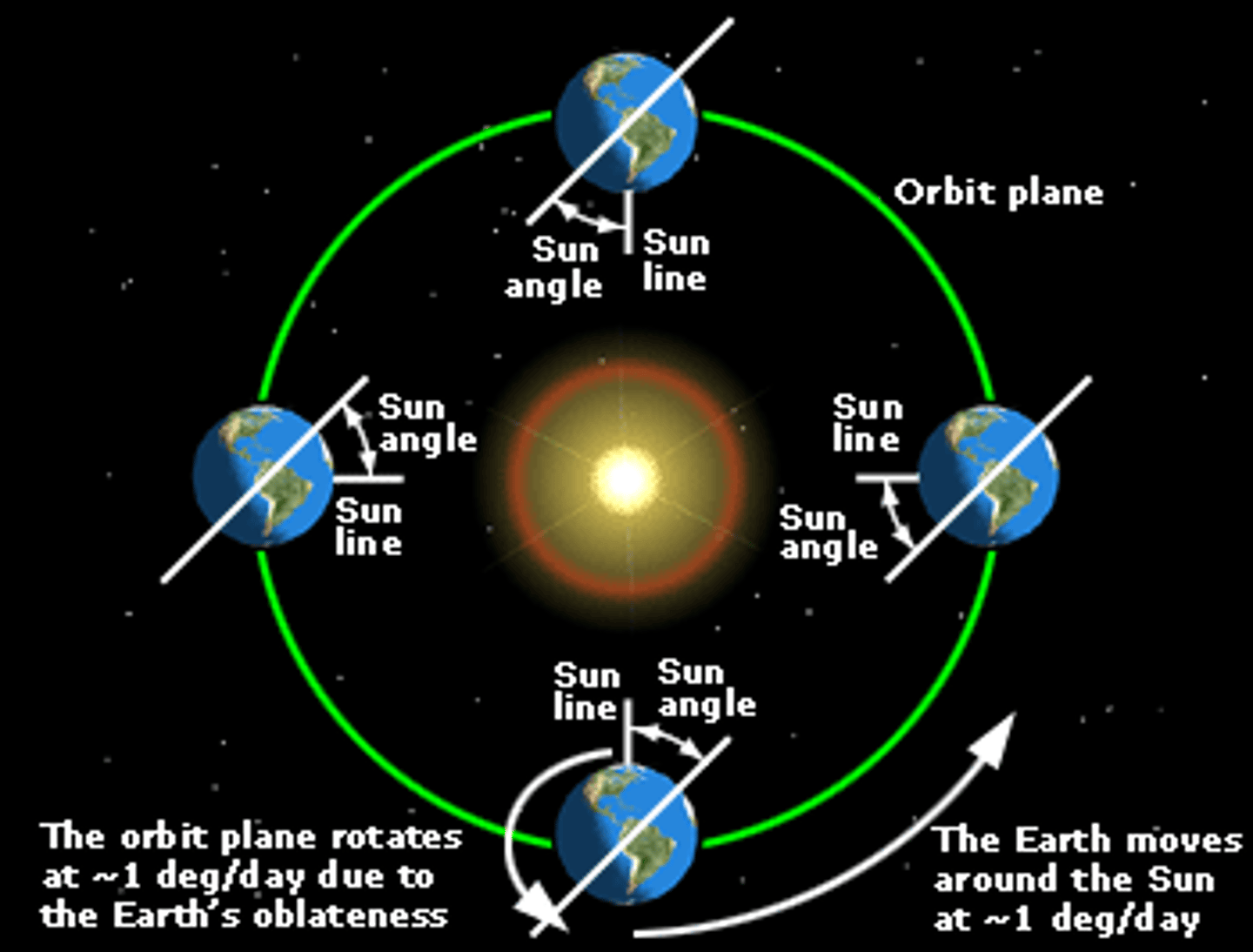
(T/F) Sun synchronous is equivalent to viewing the same point on the earth every day. Explain.
False?
A Sun-synchronous orbit is useful for imaging, reconnaissance, and weather satellites, because every time that the satellite is overhead, the surface illumination angle on the planet underneath it is nearly the same.
What are the primary sources of geometric distortion for a sensor such as MODIS? Contrast this with the primary sources of geometric distortion for a sensor such as Landsat 8/9.
Geometric Distortions
Modis: geometric distortion
Landsat 8/9: radial distortions, black strips or color distortions.
What is the difference between geometric enhancement and geometric correction of remotely sensed data?
geometric enhancement: to enhance the contrast of an image; to locate lines and contours (line detection and linear edge detection); to reduce the noise (smoothing filters).
geometric correction: Image Geometry Correction (often referred to as Image Warping) is the process of digitally manipulating image data such that the image's projection precisely matches a specific projection surface or shape.
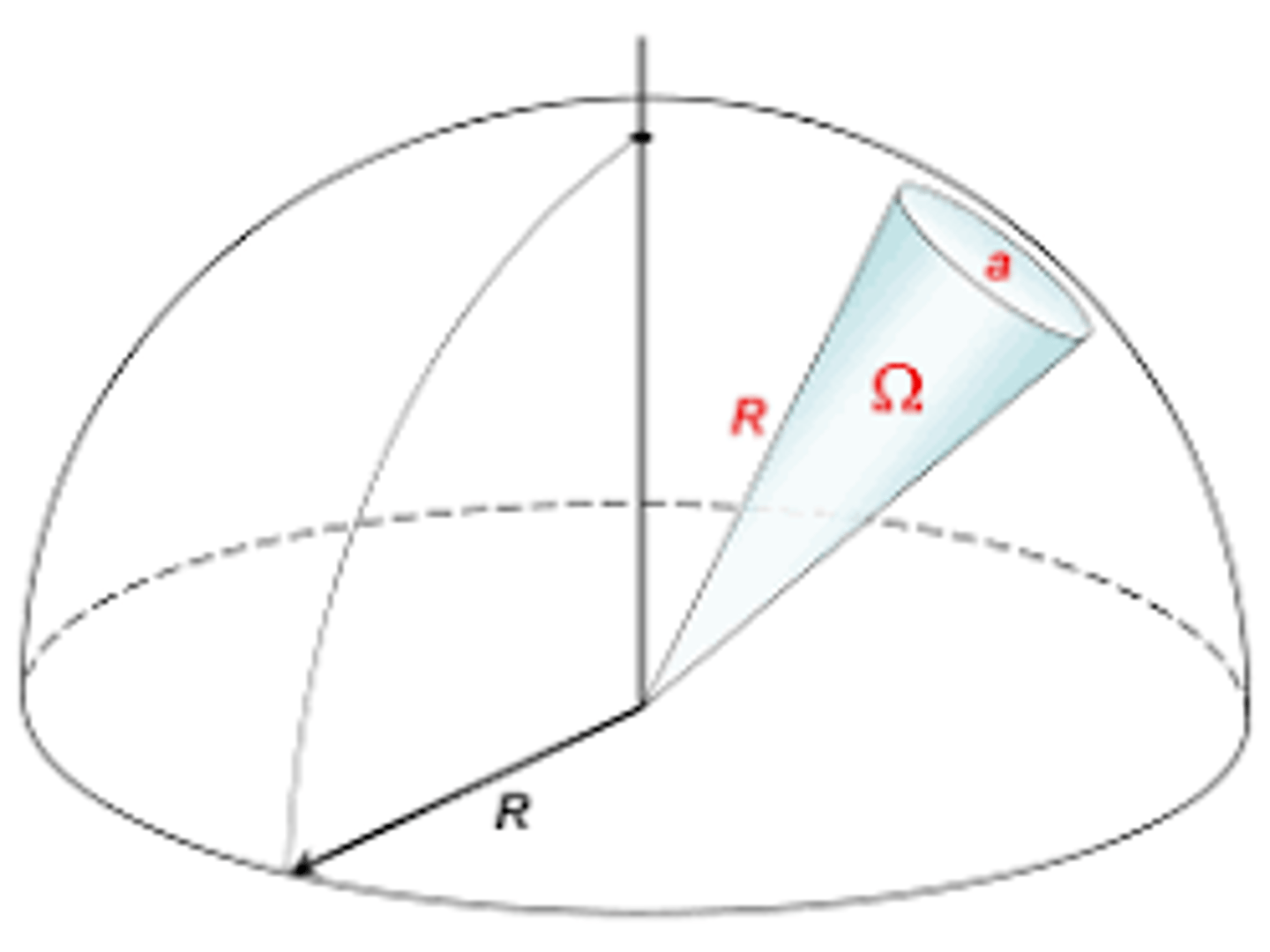
What is meant by the term "solid angle" and how is it used in the context of remote sensing?
-equal to the ratio of the sphere's segment area a to the square of the sphere's radius R
-measures how big an object appears to an observer
-Solid Angle = a/R^2
What is the kappa coefficient, and how is it used?
-evaluates classification accuracy
-a measure of agreement adjusted for chance agreement
-Computed by software
k = (observed accuracy - expected accuracy)/(1 - expected accuracy)
Why are descending orbits inclined from NE to SW and ascending orbits inclined from SE to NW?
different orbits means different task assigned to the satellite.
Describe the difference between 8 bit and 16 bit remotely sensed data and indicate why it is important (or not) to remote sensing.
-The bit depth of a satellite tells you the maximum number of values it can measure per spectral band.
-The higher the bit depth, the more information it can measure and thus the more sensitive the sensor is to different illumination values (typically called digital numbers) of the surface of the planet.
An 8-bit image will be able to display a little more than 16 million colors, whereas a 16-bit image will be able to display over 280 trillion colors
What is Planck's radiation law and why is it important?
Planck's law helps us calculate the energy of photons when their frequency is known.
G = hv
Q = Energy of a quantum, Joules (J)
h = Planck’s constant, 6.626 x 10-34 J/sec (m2 kg/sec)
v = Frequency (cycles/sec)
By substitution
Q = hc/lambda
Therefore, the longer the wavelength, the lower its energy content. (There are associated implications for instrument design, particularly in the microwave region. The spatial resolution of sensors at longer wavelengths is inherently lower).
Discuss the characteristics of sun synchronous and geostationary satellites and outline the applications for which they are most useful.
Sun Synchronous Satellites
–Cross a given latitude at the same local time each day
–Almost same solar illumination of each scene
–Satellite track shifts to compensate for 365 days in sun’s orbit
–Inclination angle allows westward shifts
–Exploits effects of gravity
Useful for: imaging, reconnaissance, and weather satellites, because every time that the satellite is overhead, the surface illumination angle on the planet underneath it is nearly the same.
Geostationary Satellites
– Orbital period equals earth’s revolution (24 hrs)– Altitude ~36,000 km; compensates for gravitational forces– Almost full hemisphere observation– Constant visibility
-above equator
-a high earth orbit that permits satellites to match Earth's rotation.
useful for: various forms of telecommunication, including television. Signals from these satellites can be sent all the way round the world.
T/F Analysis of DN numbers is analogous to analysis of radiance data in remote sensing. Justify your answer.
True?
Converting DN values to a measure of radiance is an important step toward using remote sensing data in a quantitative way – in which the values in each cell have an actual physical meaning.
Outline the operations associated with the following radiometric enhancement methods and the advantages and disadvantages of each.
a) Max/min stretch
b) Piecewise linearization
c) Histogram equalization
a) Max/min stretch
-The data only occupy a small portion of the range of values it could take on in an 8-bit display. We are “stretching ”it out to utilize the full range of the display.
-We are NOT changing the histogram; we are just stretching it out for better contrast on the display
b) Piecewise linearization
is type of gray level transformation that is used for image enhancement. It is a spatial domain method. It is used for manipulation of an image so that the result is more suitable than the original for a specific application.
ex: contrast stretching, clipping, thresholding, grey level slicing, etc
c) Histogram equalization
-Creates output histogram “equivalent” to uniform distribution (constant)
-Can result in anomalies in the image
What are the differences between pushbroom and whiskbroom sensors? What are the general advantages and disadvantages of pushbroom vs. whiskbroom?
A push broom scanner receives a stronger signal than a whisk broom scanner because it looks at each pixel area for longer. Whiskbroom has fewer sensors to keep calibrated
Pushbroom:
disadv- detectors can have varying sensitivity. If they are not perfectly calibrated, this can result in stripes in the data.
adv-can gather more light (looks at a particular area for a longer time)
Whiskbroom(mirrors):
disadv-expensive likely to wear out. (all landsat prior to landsat 8 use this) moving mirrors create spatial distortions that must be corrected with preprocessing by the data provider before image data is delivered to the user.
adv-they have fewer sensor detectors to keep calibrated as compared to pushbroom.
What is the goal of a UTM projection in terms of geometric characteristics?
one of the most common map projections(flattens from 3D to 2D) today.
Define the following terms: irradiance, radiant flux, exitance, and explain the relationship between them.
Irradiance: radiometry term for the power per unit area of electromagnetic radiation incident on a surface.
Radiant flux: is radiant energy per unit time, also called radiant power [W, mW or μW]. Radiant flux is often used to describe the radiation power output of a radiation source, or the radiation power received by an optical instrument.
exitance?
All quantities used to characterize radiation within a certain wavelength band.
Which of the following are related to unsupervised classification? (list those which are true)
a) Utilizes labeled data for training the classifier
b) Is useful for preliminary evaluation of the distribution of information classes across an image
c) Is often based on clustering in the spectral space
d) Often be computationally intensive
b, c, d
not a-(supervised learning uses labeled input and output data) unsupervised does not
Unsupervised classification: generally, useful for quickly assigning labels to uncomplicated, broad land cover classes such as water, vegetation/non-vegetation, forested/non-forested, etc)
T/F Maximum likelihood classification applies only to Gaussian distributed data.
True?
Maximum likelihood classification: assumes that the statistics for each class in each band are normally distributed and calculates the probability that a given pixel belongs to a specific class.
Outline how maximum likelihood classification is accomplished. Give an example for a 3-class problem. Explain how an observation would be classified in your problem.
Maximum likelihood classification assumes that the statistics for each class in each band are normally distributed and calculates the probability that a given pixel belongs to a specific class
Define "producers" and "users" accuracies and discuss why each is useful
Producer's accuracy: the map accuracy from the point of view of the map maker (the producer). This is how often are real features on the ground correctly shown on the classified map or the probability that a certain land cover of an area on the ground is classified as such
User's accuracies: User's accuracy is also referred to as Type 1 error. The data to compute this error rate is read from the rows of the table. The user's accuracy is calculated by dividing the total number of classified points that agree with the reference data by the total number of classified points for that class.
What is the objective of photogrammetry? List some of its fields of application.
Objective: To derive the positions and shapes of objects from imagery
applications:
-topographic mapping
-resource management
-infrastructure monitoring
-Medical
-Precision Agriculture
-Transportation
What are the basic differences between an image and a map?
map has a definite scale throughout whereas, in a picture, the scale may varies. Secondly, there are symbols for different places or objects that are used in a map, whereas there is no fixed symbols used in a picture.
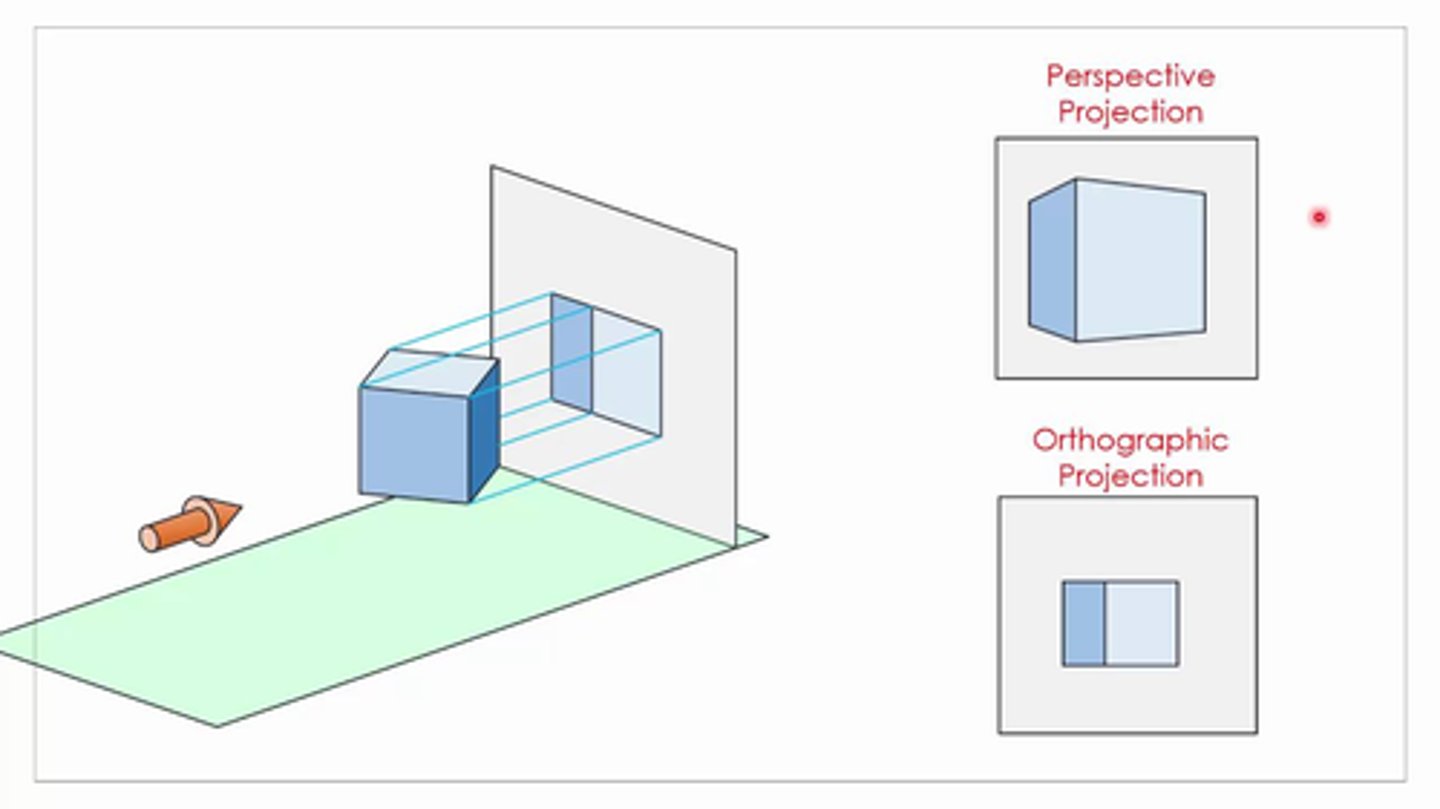
How is an orthogonal projection different from a perspective projection of imagery?
Orthographic projection is an azimuthal perspective projection, projecting the Earth's surface from an infinite distance to a plane. It gives the illusion of a three-dimensional globe so it is often used as inset map or for pictorial views of the Earth from space.
Perspective Projection: not a parallel projection and originally parallel lines will no longer be parallel after this operation. Thus perspective projection can not be done by a affine transform.
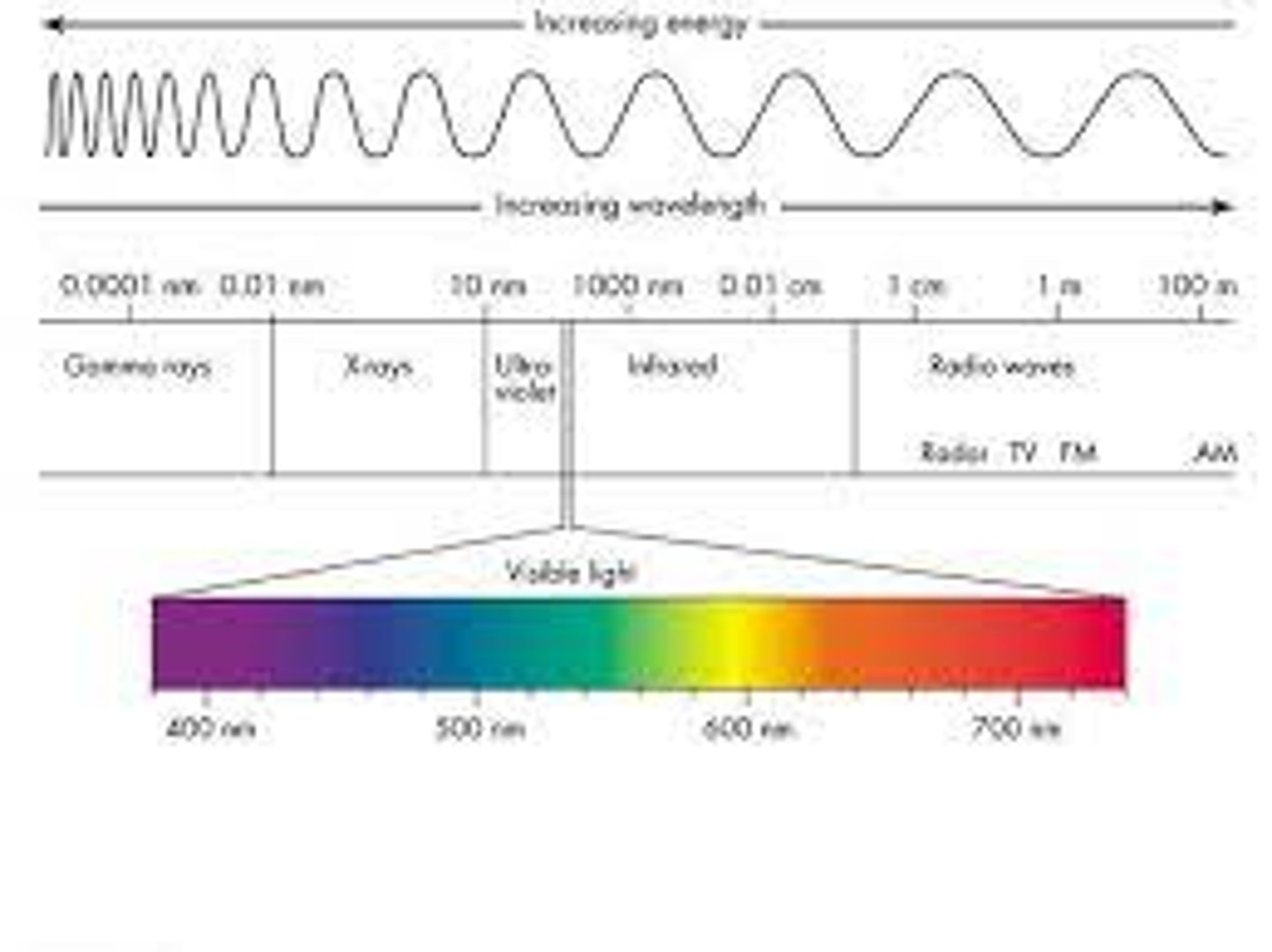
List the major spectral ranges of EM radiation. Which ones are used in photogrammetry? Which ones are used in multispectral remote sensing?
Generally, electromagnetic radiation is classified by wavelength into radio wave, microwave, infrared, visible light, ultraviolet, X-rays and gamma rays.
??
What is the basic difference between active and passive sensors?
Active sensors have their own source of light or illumination. In particular, it actively sends a pulse and measures the backscatter reflected to the sensor.
-transmit signal and record the response from targets
-Require their own power to operate
Ex: LiDAR, Radar
But passive sensors measure reflected sunlight emitted from the sun. When the sun shines, passive sensors measure this energy.
-record the received signal from the surrounding environment
Ex: RGB, multispectral, thermal cameras
An aerial camera makes an exposure at a shutter speed of 1/1,000 sec. If the aircraft's speed is 500 miles per hour, how far will the aircraft travel during the exposure?
speed = distance/time
thus, distance = speed x time
Dist. = (500 mph)(1/1,000 sec)
What is meant by the radiometric resolution of an imaging system?
Radiometric resolution relates to how much information is perceived by a satellite's sensor. While the human eye detects color, Landsat sensors measure energy reflecting or emitted from the earth and relay that information as an image to users in varying degrees of greyscale.
What is meant by the spectral resolution of an imaging system?
Spectral resolution describes the ability of a sensor to define fine wavelength intervals. The finer the spectral resolution, the narrower the wavelength range for a particular channel or band. Black and white film records wavelengths extending over much, or all of the visible portion of the electromagnetic spectrum.
What is meant by the dynamic range of data?
Dynamic range (abbreviated DR, DNR, or DYR) is the ratio between the largest and smallest values that a certain quantity can assume. It is often used in the context of signals, like sound and light.
How are the array coordinates related to image coordinates in images captured by digital cameras?
array coordinates: A coordinate array represents the data coordinates for each index in the named dimension.
Image coordinates: defines the spatial reference in terms of a primary image
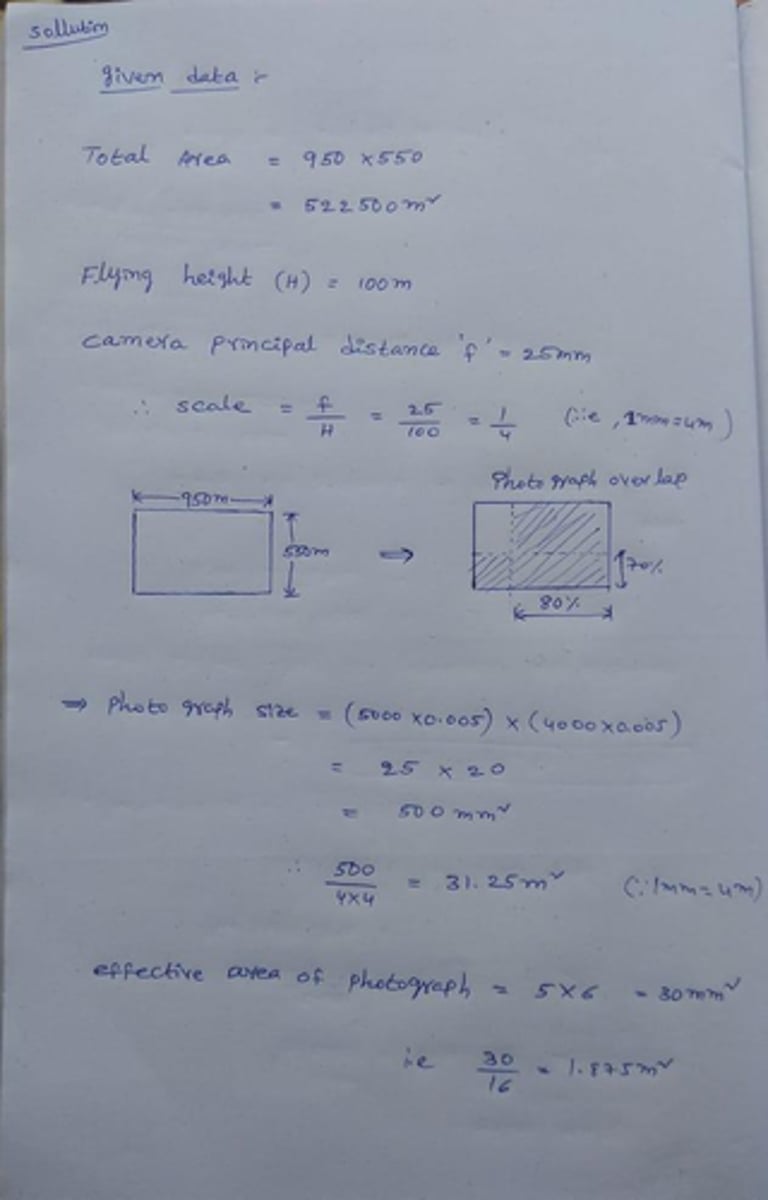
Given the following camera specifications for the imaging sensors and covered area, design a mission plan for image acquisition with 75% overlap and 60% side lap:
-Area extent is 800m and 400m in the East/West and North/South directions,
-Camera array dimensions 5000 x 4000 pixels, -Pixels size is 0.005mm
-Camera focal length is 25mm
Look at formula sheet do more research on this
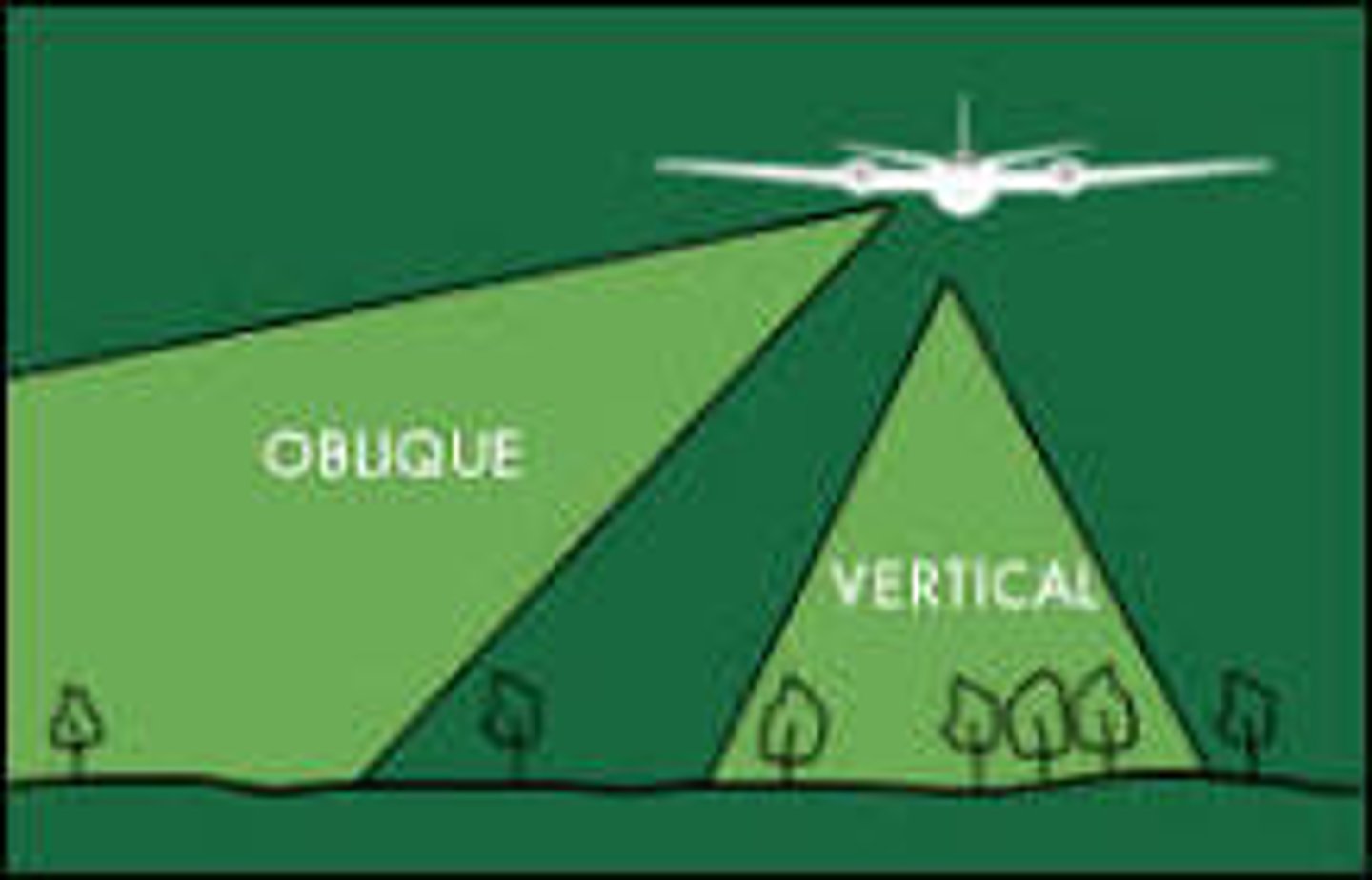
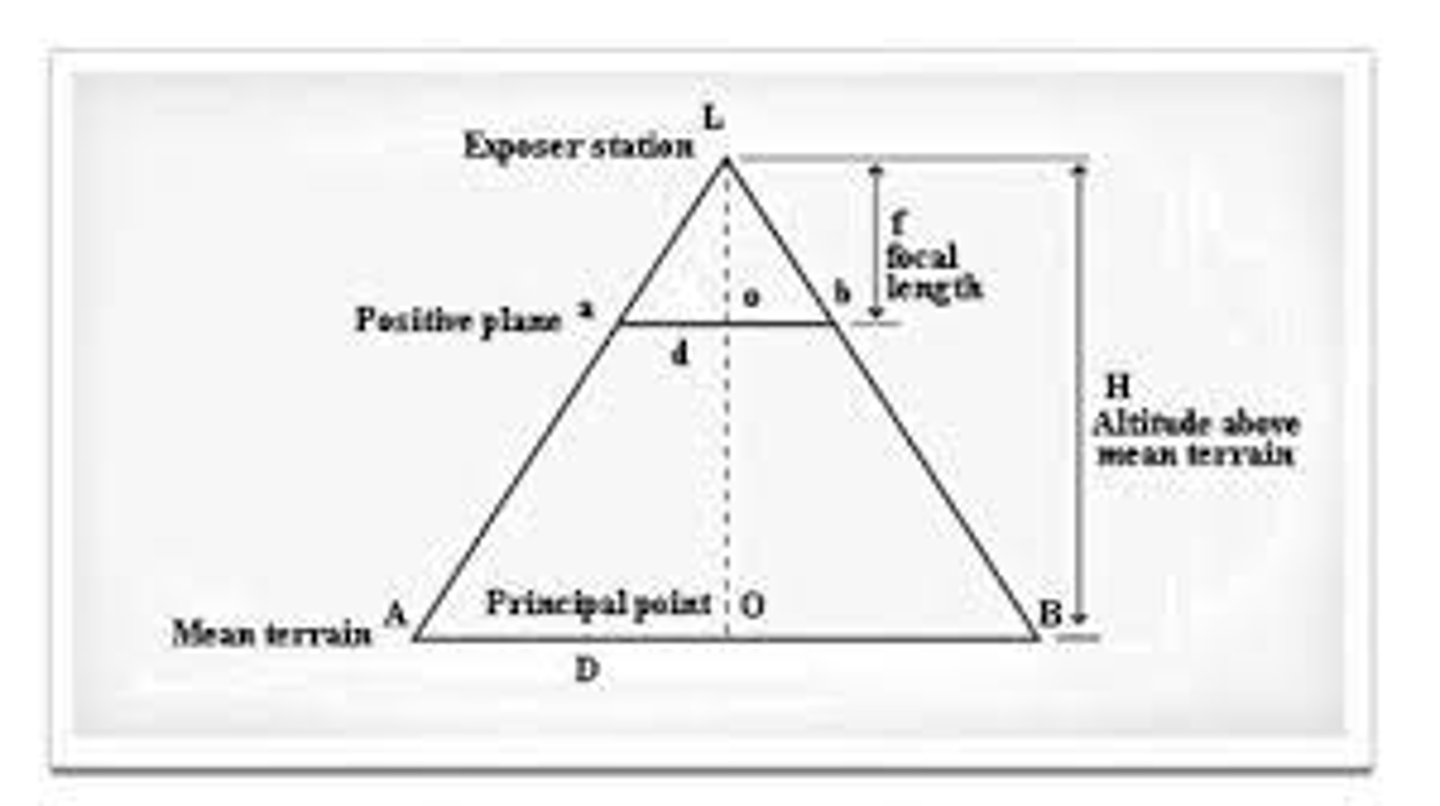
What is meant by a vertical photograph?
A vertical photograph is one which has been taken with the camera axis directed toward the ground as vertically as possible
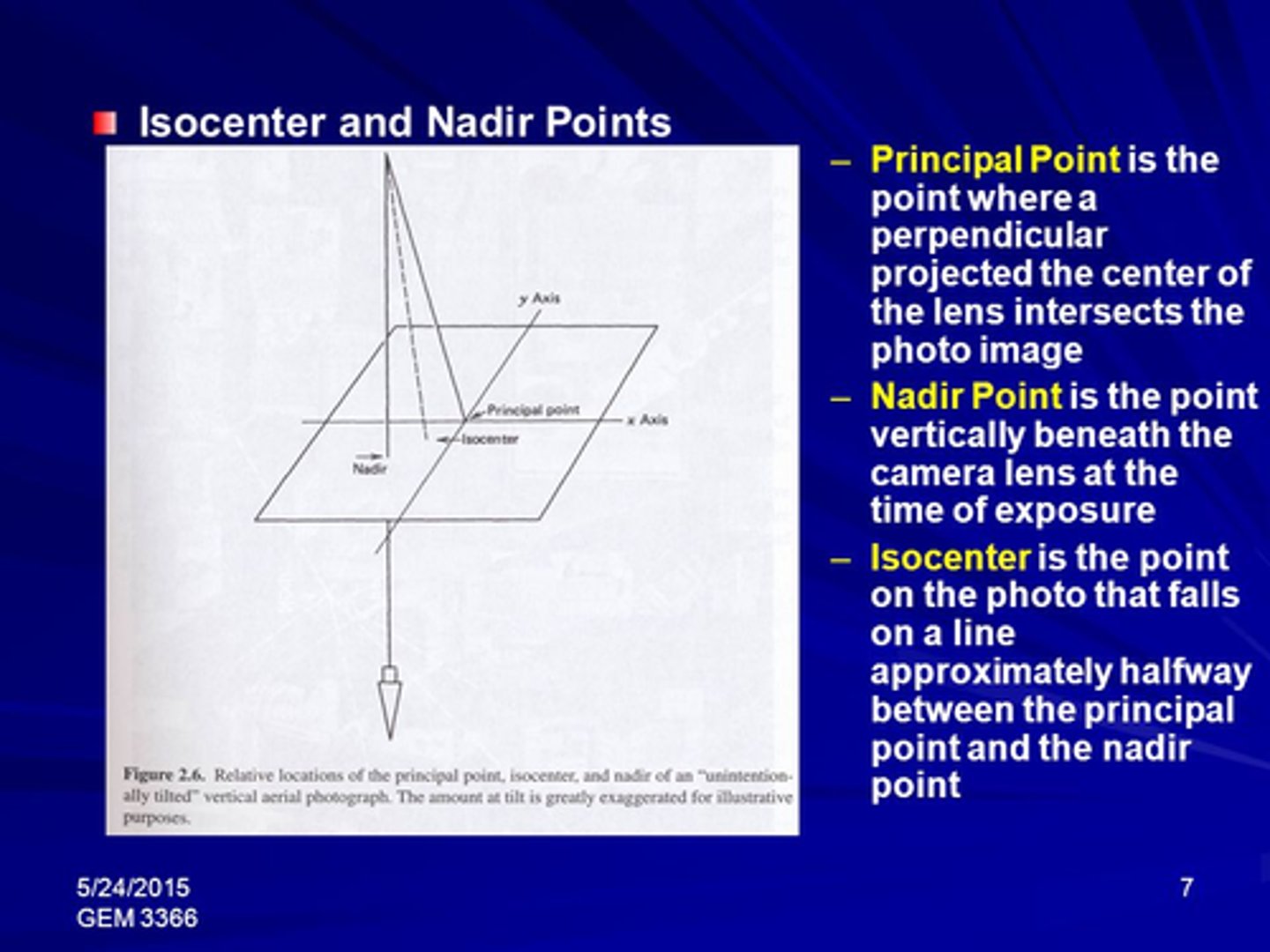
Give a brief definition of the following: Nadir point, principal point, principal distance, flying height, as well as X and Y -axes of the image coordinate system.
Nadir Point: The point on the Earth's surface directly below the satellite
Principal Point: The point on the earth where a satellite sensor is focused at any time during its orbit
Principle Distance: distance of the perpendicular line from the perspective center (center of lens opening) to the image plane of the camera
Image Coordinate System:
The Y- axis is vertical and the X-axis horizontal. The units of the system are numbers of pixels. Each pixel in the image can then be expressed in positive X- and Y-coordinates. The image coordinates for a rotated file are not the same as these for a not rotated file
What is meant by relief displacement? What are its causes and characteristics?
Relief displacement is the shift in an object's image position caused by its elevation above a particular datum. A vertical object (such as a building or tree) will appear to be lying along a line radial to the image nadir point. This deformation is called relief displacement. (caused by changes in elevation: If the elevation of the terrain surface is known throughout a scene, the geometric distortion it causes can be rectified.)
A vertical photograph captured at a flight height of 2000 ft above sea level shows a radio tower with a base elevation 540 ft above the same datum. The image of the tower has a relief displacement of 1.33". The distance from the photograph's principal point to the top of the tower is 5.97". What is the height of the tower?
On paper
What flight height would be required to produce vertical photographs with a scale of 1:12,000 over level terrain if the average elevation is 3300 ft, a term-38nd the focal length of the camera is 8"?
on paper
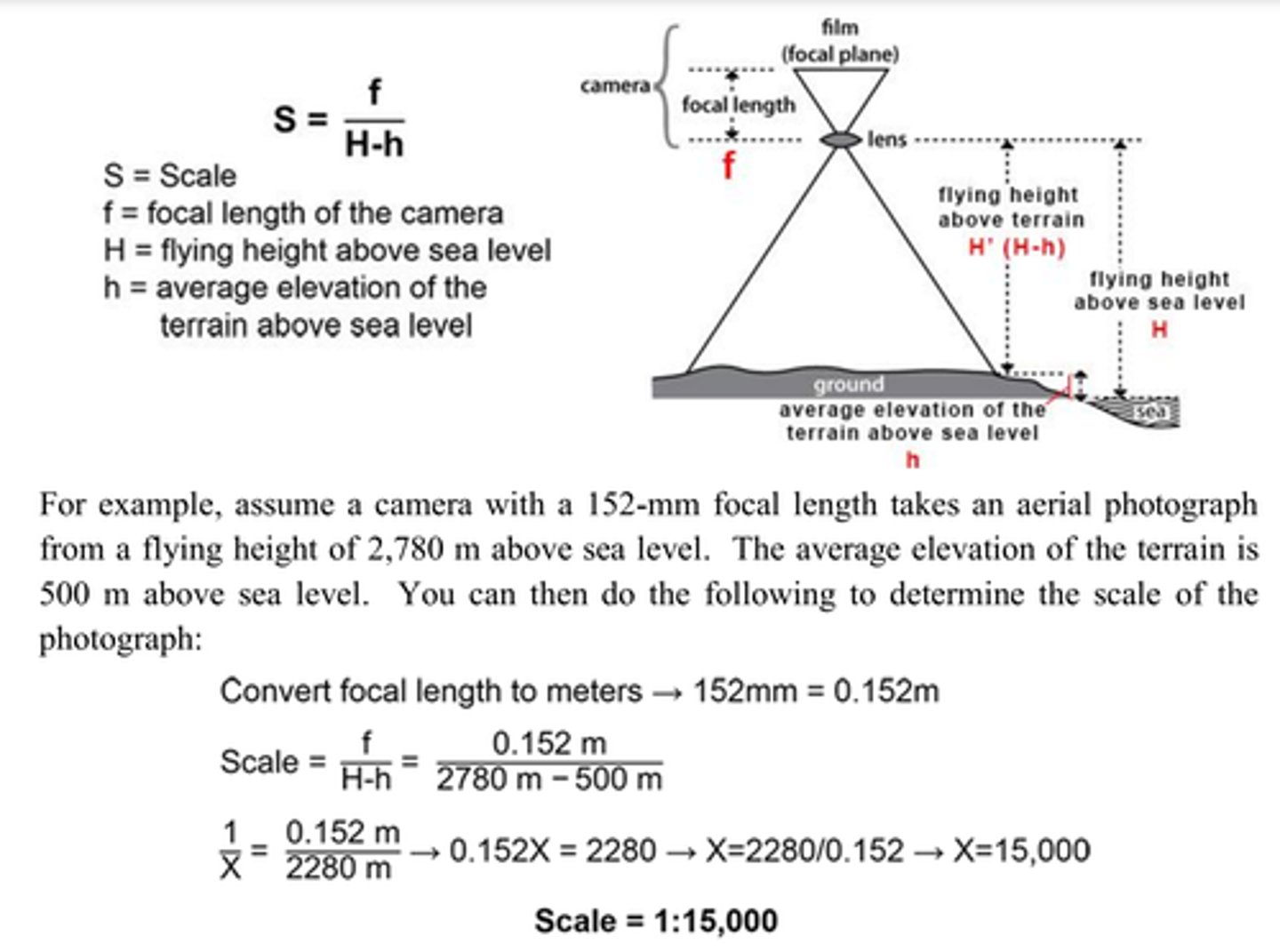
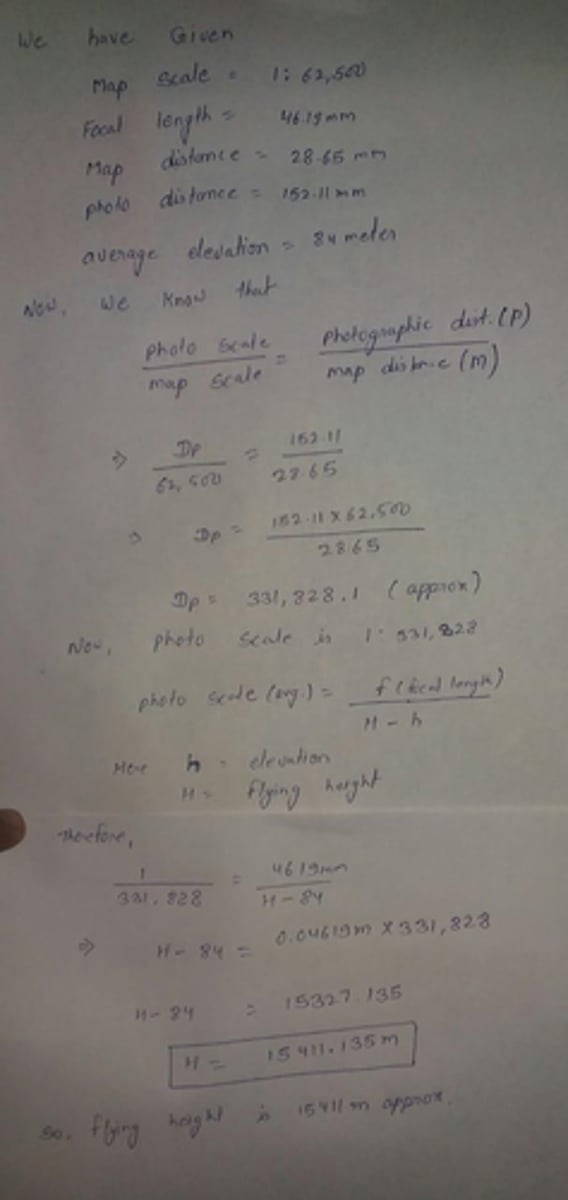
The distance between 2 points on a map at a scale of 1:62,500 is 28.65 mm. The distance between the same points on a vertical photo taken with a 152.11 mm focal length camera is 46.19 mm. If both points lie at an elevation of 84 meters, compute the flying height above the datum.
work in the image
What is the relationship between the principal point and the nadir point in a vertical image?
Principal Point: The principal point is the point where the perpendicular projected through the center of the lens intersects the photo image. Nadir: the point vertically beneath the camera center at the time of exposure.
What is meant by x-parallax and how can it be used for determining elevation?
The apparent change in relative positions of stationary objects caused by a change in viewing position.
This difference in elevation can also be determined directly by measuring the difference in parallax between the two points
What is y-parallax, and what is its use in determining elevation?
y-parallax:[PHOTOGRAMMETRY] The difference between the perpendicular distances of two images of a point from the vertical plane containing the air base The existence of y parallax is an indication of tilt in either or both photographs and/or a difference in flight height; it interferes with stereoscopic examination of the pair
What is the purpose of the collinearity equations?
general collinearity equations have been developed to establish the relationship between image and object space points frame and linear array scanners. To reconstruct the position and shape of objects from imagery, the geometry at the time of exposure must be known.
What is the purpose of rotation matrices?
There are three common uses of a rotation matrix: The first is to represent an orientation. The second is to change the frame of reference of a vector or frame. And the third is to rotate a vector or frame.
What are the rotation angles and rotation sequence utilized in photogrammetry? Is it important to follow a certain order while applying these rotations? Why?
Rotation angles:
The omega, phi, kappa angles are defined as the angles used in order to rotate a (X, Y, Z) geodetic coordinate system and align it with the image coordinate system. The rotations are applied in the following order: Kappa (κ), the rotation around the Z axis. Phi (φ), the rotation around the Y axis.
-Order of rotations does matter(final location of the figure will not be the same)
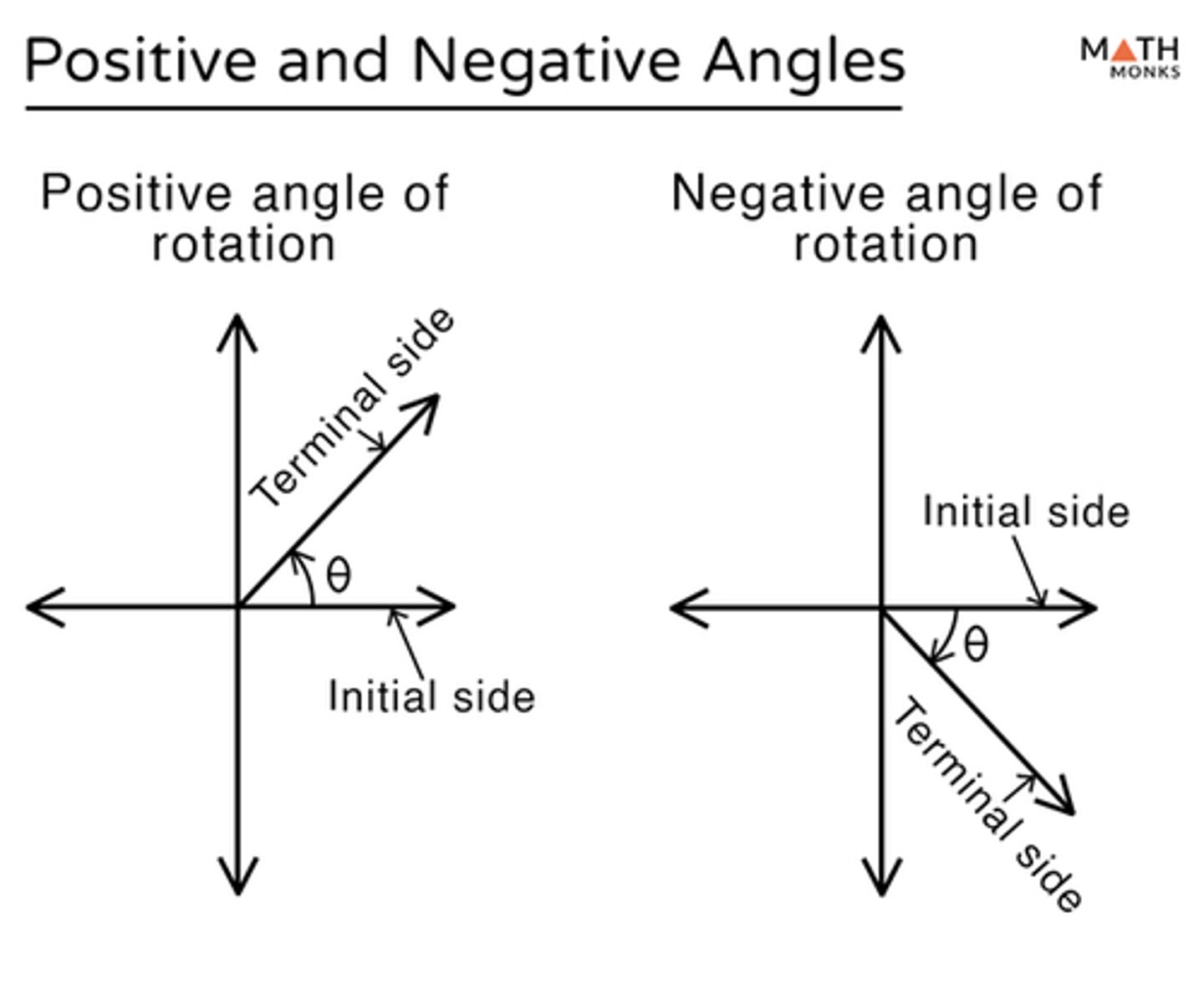
Using a simple sketch, describe the negative directions for the rotation angles.
image->
Can you perform 3D reconstruction from a single LiDAR pulse? Why?
No, it would not be very accurate since the first laser pulse would reflect off of the canopy of trees(more would be needed as the last pulse would show the terrain surface beneath the trees). Maybe if it was an entirely flat and uncovered landscape.
Can you perform 3D reconstruction based on a single image? Why?
No, Since a single image loses a lot of information about the three-dimensional object, the reconstruction result is uncertain. You would need to pull prior model data.
What are the advantages of photogrammetric mapping compared to laser scanning?
Generally, laser scanning is your tool if you need a high level of accuracy over a large space. Photogrammetry is a better tool if you are documenting smaller spaces and are looking for less accuracy but more visual photo realism
What are the advantages of laser scanning compared to photogrammetric mapping?
Generally, laser scanning is your tool if you need a high level of accuracy over a large space. Photogrammetry is a better tool if you are documenting smaller spaces and are looking for less accuracy but more visual photo realism.
Do we have redundancy in the 3D reconstruction from a LiDAR system?
LiDAR has no inherent redundancy
(However, photogrammetry has high redundancy)
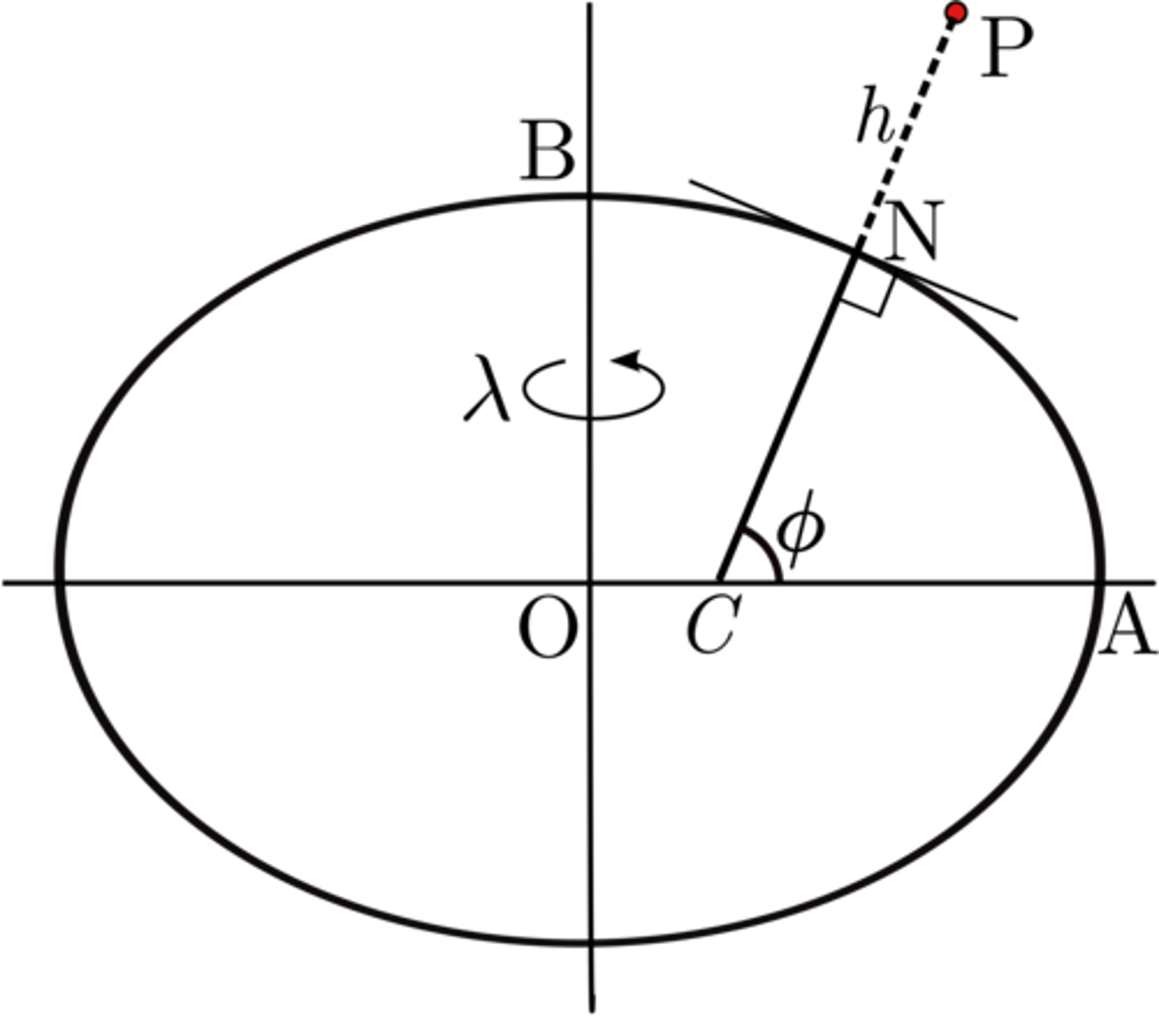
Describe the differences between a geocentric and geodetic coordinate system.
Geodetic latitude is defined as the angle between the equatorial plane and the surface normal at a point on the ellipsoid
geocentric latitude is defined as the angle between the equatorial plane and a radial line connecting the center of the ellipsoid to a point on the surface (see figure of geodetic coords).
Why is signal modulation used for GPS signals?
The primary purpose of modulation in a communication system is to generate a modulated signal suited to the characteristics of a transmission channel. In radio communications, modulation is needed in the transmission systems to transfer the message into the available high frequency radio channel.
Describe pseudo-range measurements in GPS.
The pseudorange is an approximation of the distance between a satellite and a GNSS receiver
What are phase-shift measurements in GPS and why are they useful?
A measure of the range between a satellite and receiver expressed in units of cycles.
Carrier phase tracking is a highly accurate means of positioning used in GNSS surveying applications.
(0, 90, 180, 270, 260 degrees)
What does the term "clock bias" refer to in GPS?
The third-largest error, which can be caused by the receiver clock, and its oscillator. Both a receiver's measurement of phase differences and its generation of replica codes depend on the reliability of this internal frequency standard.
What is accomplished with differential GPS?
Differential correction techniques are used to enhance the quality of location data gathered using global positioning system (GPS) receivers. Differential correction can be applied in real-time directly in the field or when postprocessing data in the office
What is relative positioning compared with single-point positioning?
With GPS technology we are able to obtain the position of a point by two different methods: precise point positioning - when we employ only one GPS receiver, and relative positioning – when we use two or more GPS receiver simultaneously tracking the same satellites.
-We show that by using only one GPS receiver and suitable software for processing we are able to obtain positioning accuracy comparable to the relative positioning.
-accuracy of both methods depends mostly on the duration of the session.
Compare accuracy and precision in measurements
Accuracy refers to how close a measurement is to the true or accepted value.
Precision refers to how close measurements of the same item are to each other.
How does the Central Limit Theorem relate to estimating errors in measurements?
The central limit theorem states that if you have a population with mean μ and standard deviation σ and take sufficiently large random samples from the population with replacement , then the distribution of the sample means will be approximately normally distributed. (we know that our sample distribution is normal with mean =μₑ)
What is a random sample of observations, and how does it relate to estimating error in measurements?
A simple random sample is a subset of a statistical population in which each member of the subset has an equal probability of being chosen. A simple random sample is meant to be an unbiased representation of a group. Random sampling establishes a systematic approach to selecting a sample.
Which of the following describes pseudorange measurements:
a) Relate to distance from a GPS satellite to a GPS receiver
b) Are calculated using the time to the receiver divided by 2
c) Are more accurate than phase-range measurements
d) Require at two satellites for an accurate position of the receiver
a
Which of the following describes the classification of point cloud data:
a) Separation of ground points from all other points
b) Developing a terrain model
c) Determining vegetation points
d) Detecting anomalies
e) Involve classification using the maximum likelihood method
a, b, c, d
Which of the following responses best describes the use of collinearity equations?
a) Are primarily used to determine ground coordinates from image coordinates in vertical photography.
b) Collinearity requires that a point on the ground, the corresponding point on the image plane, and the perspective center are collinear
c) Describe the relationship between image coordinates and ground coordinates for tilted photography
d) Are nonlinear in the rotation angles and must be solved iteratively
b, c, d
Which of the following best describes differential GPS for point positioning?
a) Use of two receivers that acquire data simultaneously in nearly the same area to mitigate the impact of the atmospheric
b) Selection of satellites to improve geometric position of dilution (GDOP)
c) Helps mitigate the impact of receiver clock bias
d) Positioning of receivers to reduce multi-path
e) Involves the use of a base station at a known position
a, e
Which of the following describes the interaction of energy with a target on the ground?
a) Independent of wavelength
b) Reflectance signatures are target specific c) Irradiance component at the target is transmitted only along the direct path
d) Irradiance is impacted by atmospheric transmission
b, d
What is the greatest source of error in GPS Measurements?
a) clock bias on the satellite
b) clock bias on the receiver
c) Ionosphere
d) Ephemeris information for the satellite
c
Which of the following best describes the expectation of a random variable:
a) The expectation of a random variable is the first moment of the distribution about zero
b) The variance of a random variable is the 2nd moment of the distribution about the mean
c) The expectation of any function of a random variable is that sum or integral of that function multiplied by the probability distribution/density function and summed/ integrated over the domain
d) The expectation of a random variable is its "most likely" value, but can be impacted by outliers
all choices correct
What is the difference between GPS and GNSS
a) GNSS includes GPS and other satellite navigation systems
b) GNSS signals can be received by many receivers, as well as GPS
c) GNSS satellite systems are not identical
All choices correct
Which of the following relates to classification of remotely sensed imagery?
a) Unsupervised classifiers utilize ground truth (reference) data
b) Error of a classification result can be assessed for supervised classifiers, but not for unsupervised classifiers
c) Unsupervised and supervised classifiers typically use spatial adjacency, not spectral information
d) The recommended number of training points for a supervised classifier is 2 times the number of bands
e) Unsupervised classification requires a lot of prior knowledge.
b
Which of the following relates to the GPS satellite signals?
a) Signal is modulated with a higher frequency carrier code
b) Signal is transmitted in 30 second messages
c) Pseudo random sequences of numbers are used for the transmissions that are identical for all GPS satellites
d) L1 and L2 codes are the same frequency and used for redundancy
a, b
What is the most appropriate description of independent random variables?
a) If random variables are uncorrelated, they are independent
b) Independence refers only to the normal distribution
c) If random variables are independent, the joint probability density function is the product of the marginal distributions
d) A random sample is comprised of independent random variables from the same distribution
c, d
Which of the following is true for LiDAR?
a) LiDAR is an active sensing technology
b) LiDAR is a passive sensing technology
c) LiDAR emits tens to hundreds of thousands of pulses per minute
a, c
Which of the following responses is relevant for planning for an airborne campaign:
a) Overlap along track
b) Sidelap between flightlines
c) Altitude of the flight
d) Focal length of the camera
e) Only the length of the area that is flown
f) The width of the image plane
a, b, c, d, f
The reason that the normal distribution is assumed for uncertainty in geomatics is:
a) The normal distribution is well-known and easy to manipulate
b) The parameters of the normal distribution are the mean and variance
c) The Central Limit Theorem proves that the sample mean of a distribution is normally distributed, regardless of the distribution of the original random variable
d) The normal distribution provides positive and negative errors
c
Which of the following best describes stereoscopic parallax?
a) Can be computed in both the X and Y directions
b) Defined as the apparent displacement of the position of an object with respect to a frame of reference due to a shift in the point of observation
c) Parallax in the y direction is useful for determining elevations
d) Useful for calculating the horizontal distances between points
a, b, d
Which of the following relate to dynamic range of data?
a) Repeat period for satellite platforms
b) Number of bits used to represent the data c) Contiguous spectral bands d) Integer values
b, d
Which of the following is/are relevant for rotating coordinate systems to develop collinearity equations?
a) Most real-world systems do not satisfy the requirements of vertical photography because of pitch/roll/yaw of the platform
b) Rotating coordinate systems keeps you sharp in high school geometry
c) Use right handed systems as a convention
a, c
Which of the following responses best describes scaling of vertical photography:
a) Scale is the ratio of a line in the image plane and the corresponding line in the object domain
b) Scale is the ratio of the focal length of the camera and the height to the perspective center
c) The perspective center to the ground does not necessarily coincide with the plumb line
a, b
What is the average scale of a vertical photography if flying height is 5500 ft, the focal length of the camera is 8 1/4 inches, and the average ground elevation above the datum is 920 ft?
a) 1 inch / 555 ft
b) 1 inch / 750 ft
c) 1 in 275 ft
a
Which of the following best describes the topic "spatial filtering of imagery?
a) Spatial filters are primarily low pass filters b) Gradient filters focus on smoothing noise c) Spatial filters utilize the concept of convolution for both smoothing and enhancing edges
d) Median filters are convolution filters
c
Which of the following describes weather satellites:
a) Weather satellites acquire high temporal, low spatial resolution data
b) Weather satellites are often geostationary c) Weather satellites are always polar orbiters d) Weather satellites acquire data only in the thermal portion of the spectrum
a, b
Which of the following is true for remote sensing image acquisition systems:
a) Pushbroom sensors differ from whiskbroom sensors in that the image sequence is built up along track by the motion of the aircraft.
b) Frame cameras acquire 2-dimensional arrays of data in each band simultaneously.
c) Pushbroom cameras only acquire data in one band
d) Whiskbroom sensors are advantageous for platforms with wide-fields-of-view (large swaths)
b, d