Ch. 10: Oscillations
1/14
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
15 Terms
Vibrational motion
-the repetitive movement of an object back and forth about an equilibrium position
*motion that repeats in some known manner
-Examples: pendulum, spring
equilibrium position
x=0
*-A to +A= one complete oscillation
-T
-f
-A
-k
-m
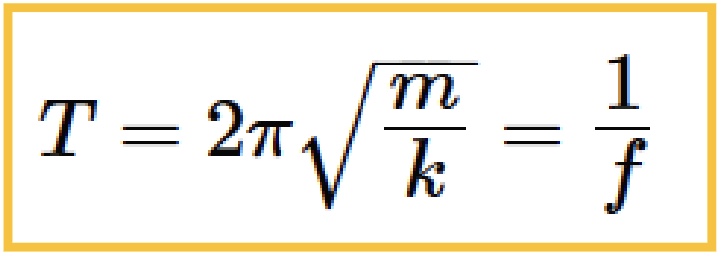
-T= period of oscillation in seconds = time for motion to repeat once (1 full cycle) = 1/f
-f= frequency of oscillation in Hertz or Hz = 1/second (inverse period)
-A= amplitude = maximum displacement from equilibrium (a distance, + or -)
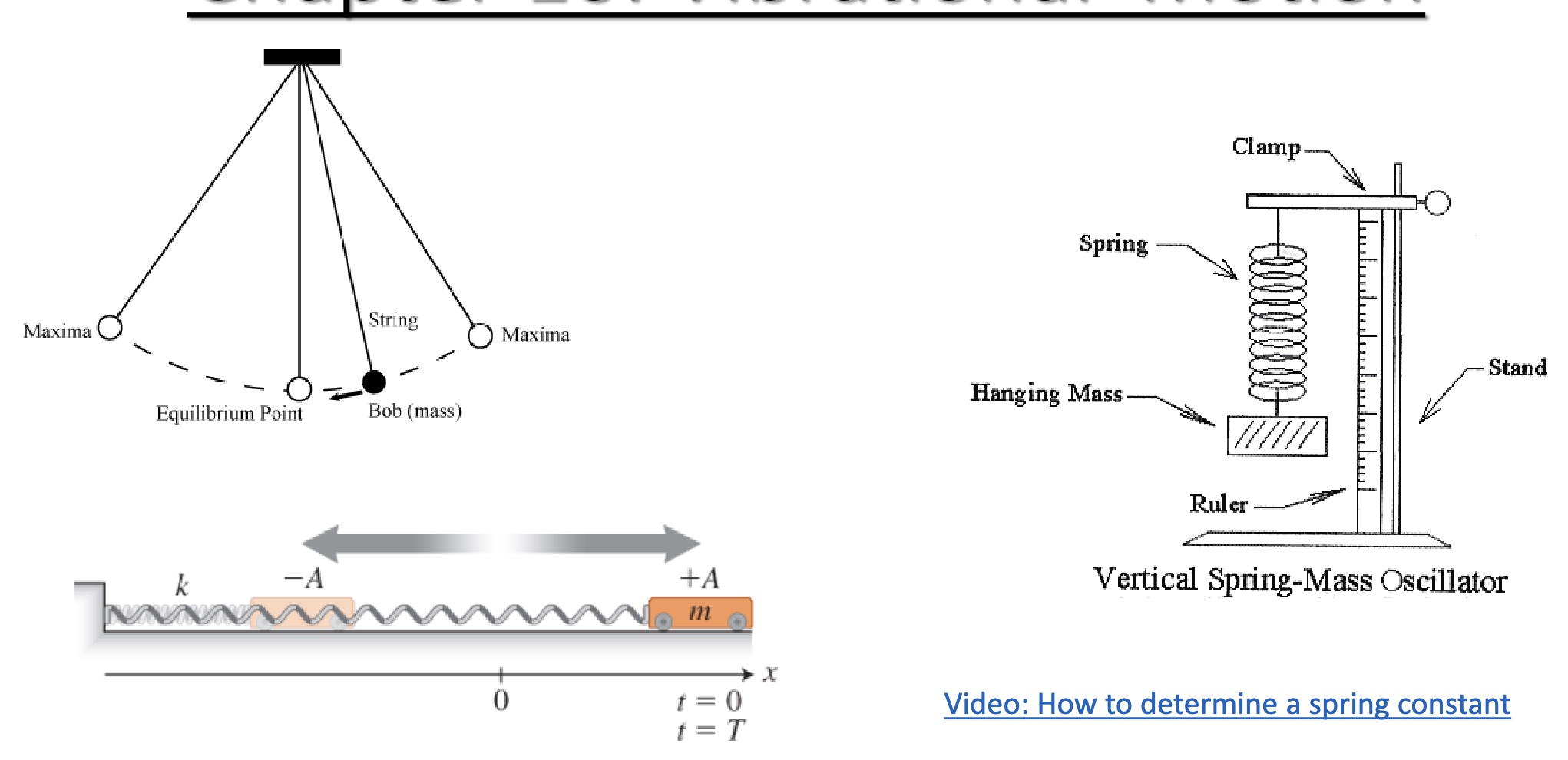
-k= effective spring constant in N/m (how stiff the spring is; larger = harder to stretch or compress/more stiff)
-m= mass attached to spring in kilograms (kg)
Hooke’s Law
-the resorting force/spring is directly proportional to the compression or extension of the system
*won’t have to use, but understand bc relates to spring constant; as spring constant goes up, the restoring force also goes up

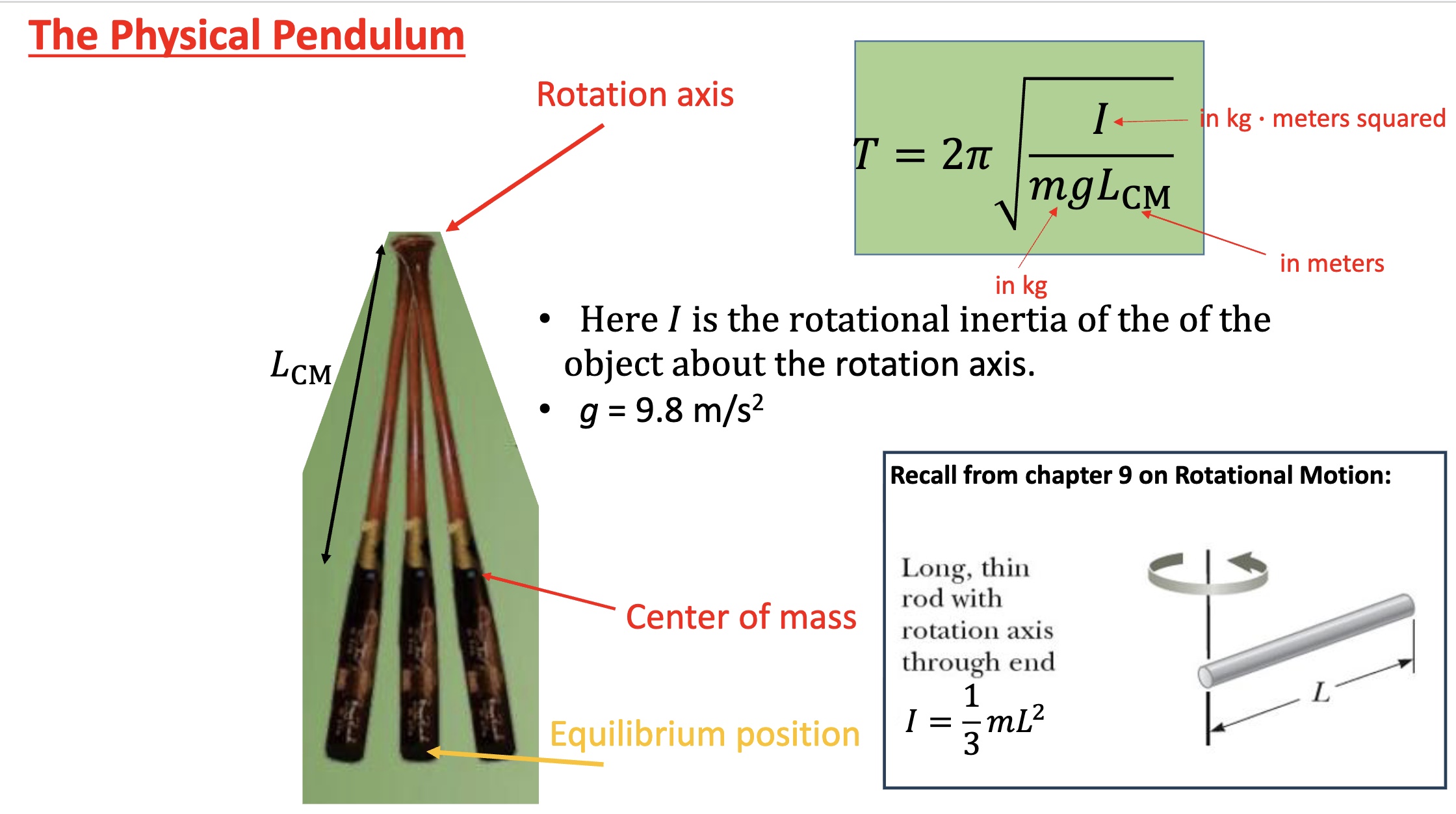
The Physical Pendulum
-any object swinging back and forth
-has a rotation axis, center of mass, and equilibrium position (when vertical)
-I (rotational inertia) for a long rod= 1/3mL²
-”Lcm”= length (in meters) from the rotation axis to the center of mass
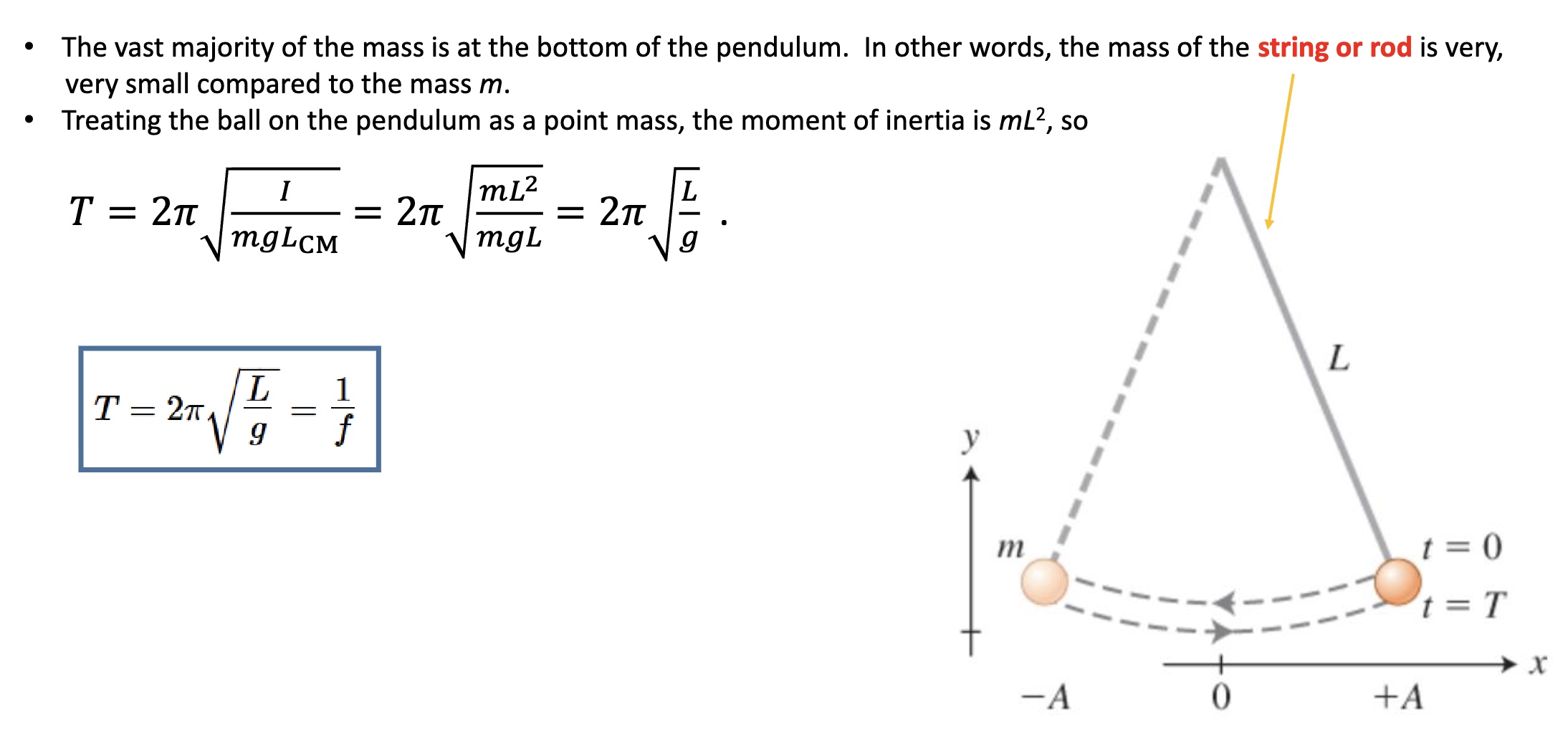
The Simple Pendulum System
-the vast majority of the mass is at the bottom of the pendulum. The mass of the string or rod is very small compared to the mass m
-Treat the ball on the pendulum as a point mass, so the moment of inertia is mL²
*thus, the period only depends on length and gravity! (not mass or amplitude/how far it gets pulled back)
*L=entire length of the pendulum
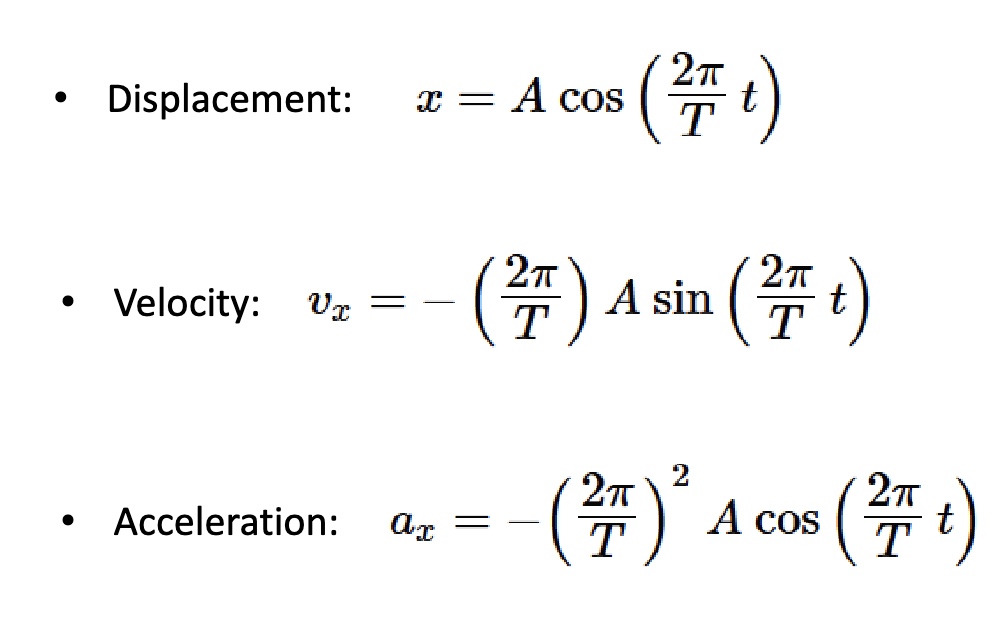
Simple Harmonic Motion
-a mathematical model of vibrational motion when position x, velocity Vx, and acceleration ax of the vibrating object change as sine or cosine functions with time
*”simple”=friction not important, “harmonic”=repeating
-applies to a spring (horizontal or vertical) with a mass or a pendulum
*t= time elapse since t=0
for simple harmonic motion calculations (displacement, velocity, and acceleration), make sure to put your calculator in….
radian mode!!!
at x=+A…
*motion starts at x=+A
-t=0
-Vx=-(2π)/Tsin(0)=0
-ax= -(2π/T)²Acos(0)=-(2π/T)²A
max acceleration down
*negative=down (bc FNext down)
at x=0…
-t=T/4
-Vx=-(2π/T)Asin(2π/T * T/4) =-(2π/T)A
max velocity
-ax=-(2π/T)²Acos(2π/T * T/4) = 0
*because force of the spring = force of gravity (acceleration increase to equilibrium and decreases once pass)
where are max acceleration up and down? when is acceleration zero?
-max acceleration down is at x=+A
*ax=-(2π/T)²A
-max acceleration up is at x=-A
*ax=+(2π/T)²A
-zero acceleration when x=0
*bc Fsp=Fg or FNet=0
where are max velocity up and down?
-max velocity down is at x=0
*Vx=-(2π/T)A
-max velocity up is at x=0
*Vx=+(2π/T)A
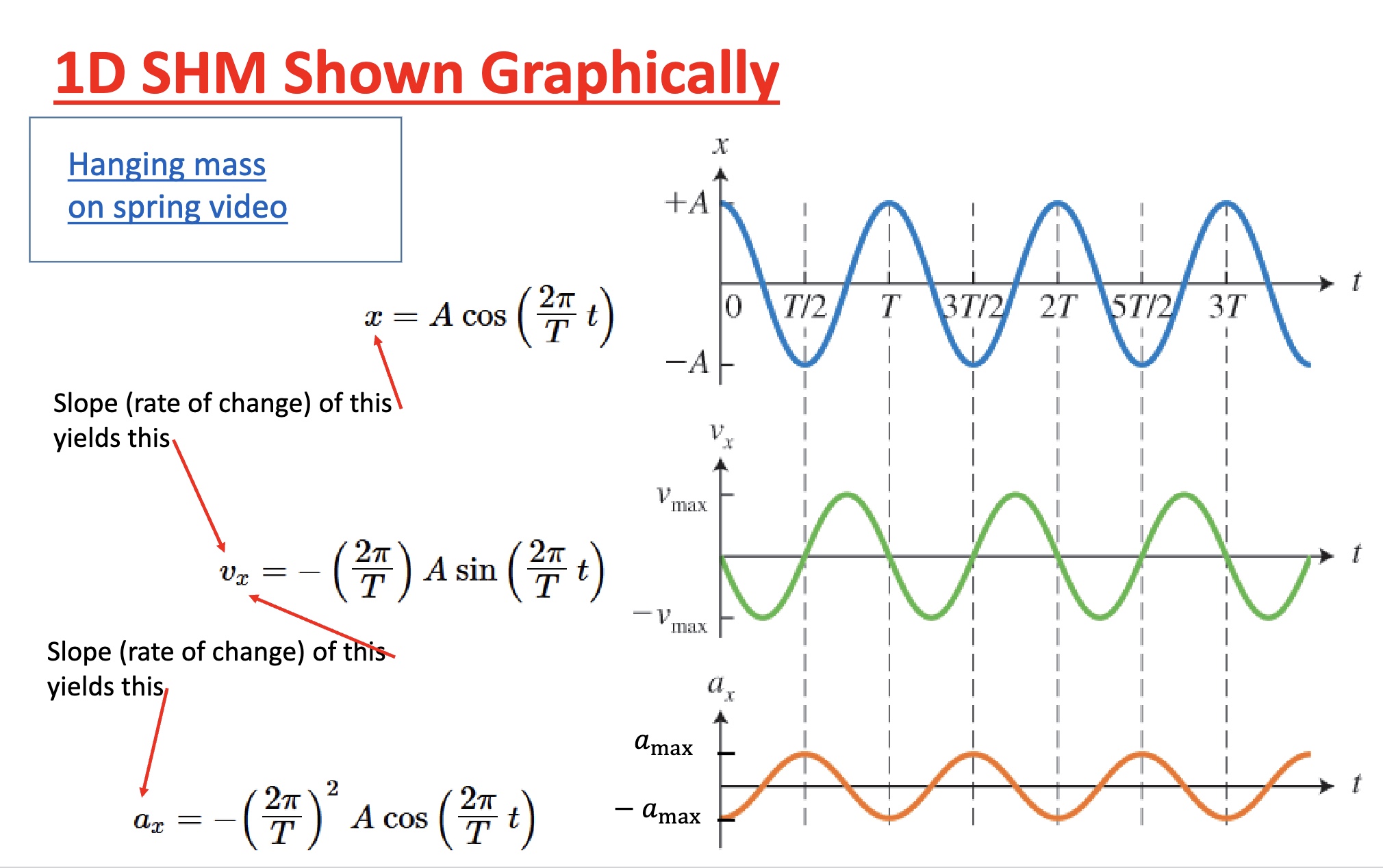
1D SHM shown graphically
-from PHYS 1001: slope of one graph gives you the next graph (ex: slope of the position versus time graphs gives you the velocity vs time graph, and similar with velocity vs time and acceleration vs time)
*ask yourself if the slope if positive, negative, or zero
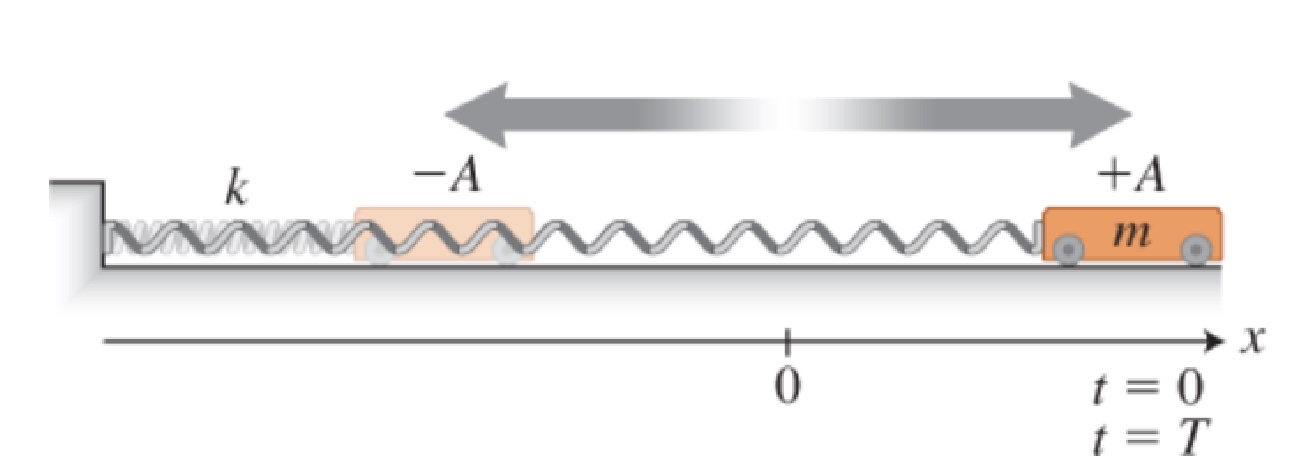
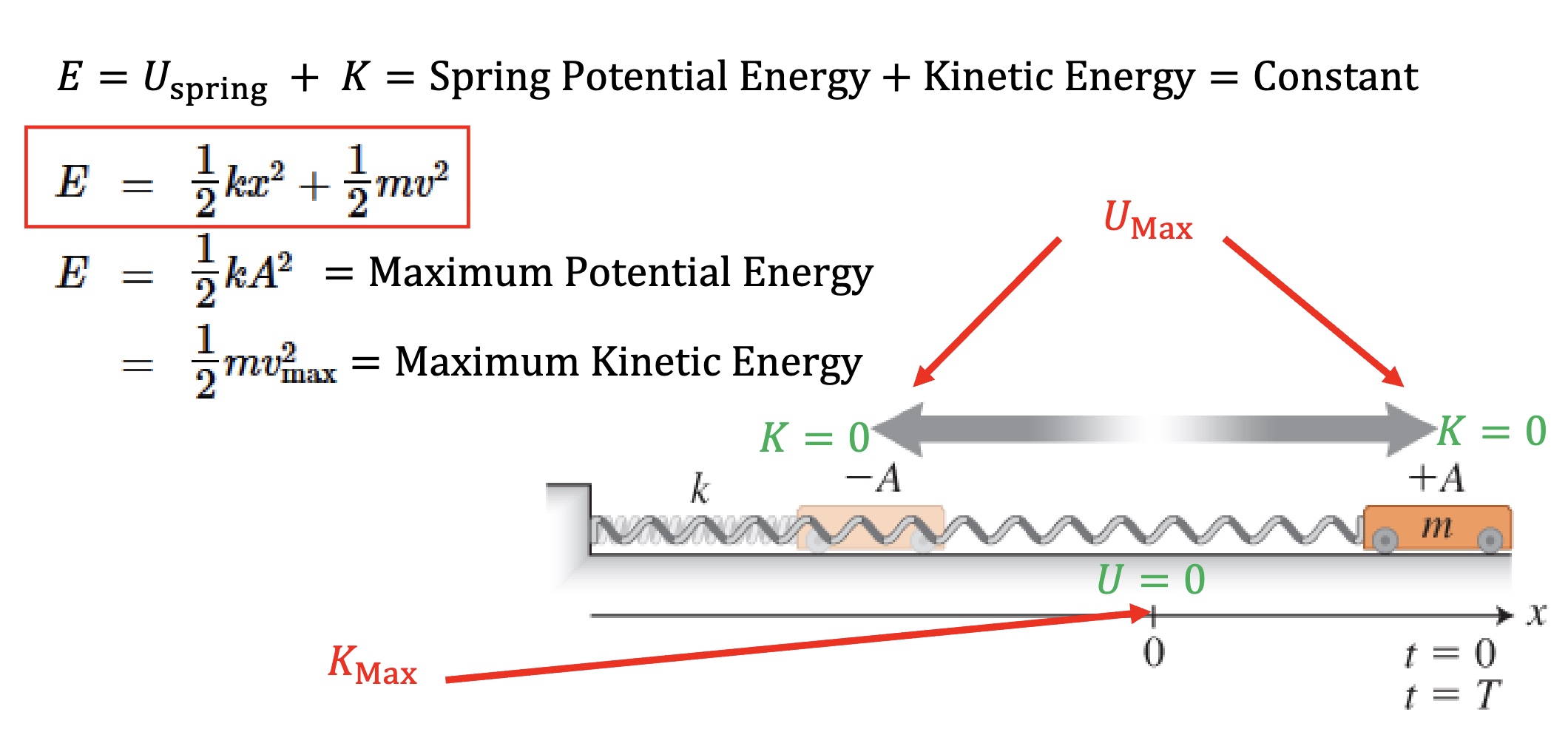
The total mechanical energy of a spring-object system vibrating horizontally
-E (total mechanical energy, in Joules) is always constant
-at equilibrium (x=0): only have kinetic energy, and where have max velocity
in the equation: k=spring constant; x=how much the spring is compressed or stretched (displacement from equilibrium)
-at -A and +A: only potential energy (no KE or velocity)
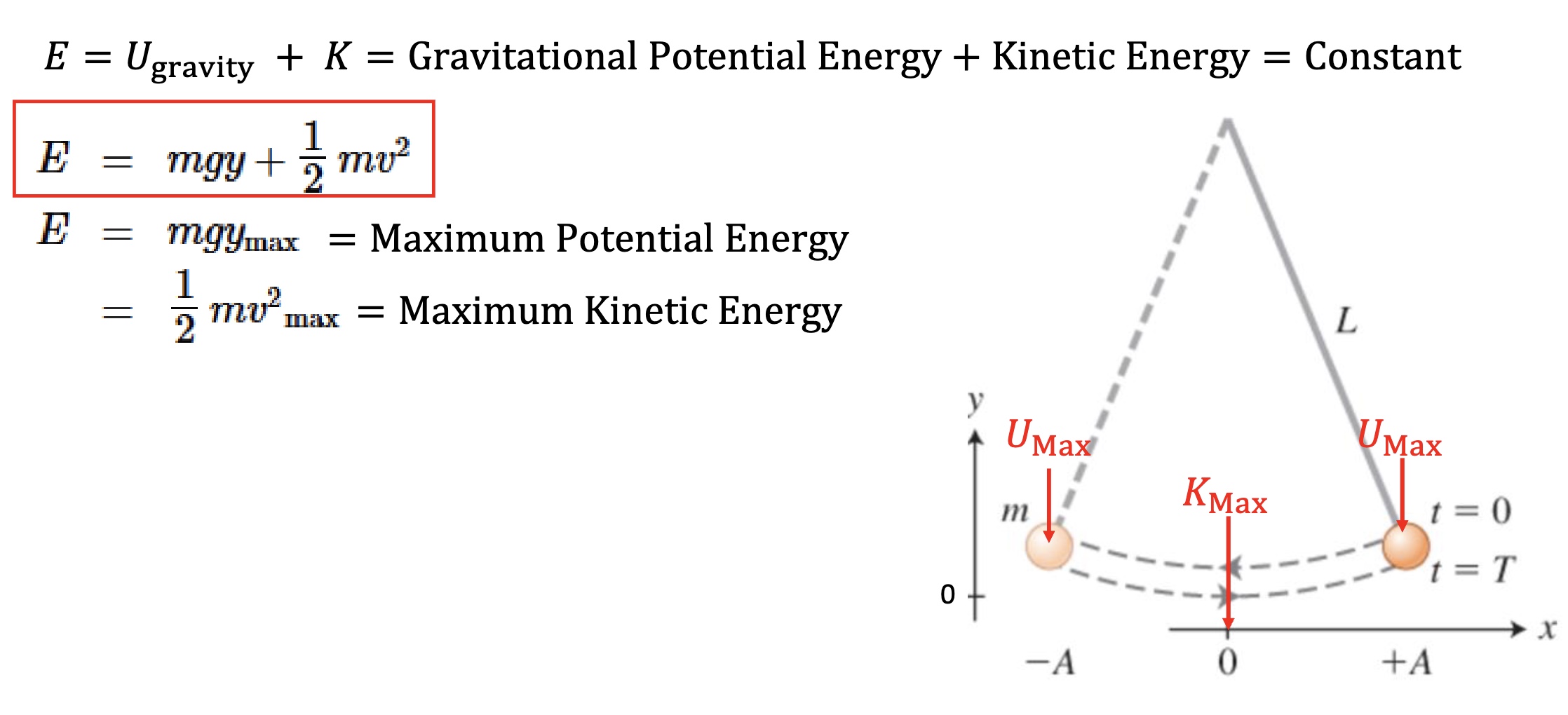
The total mechanical energy of a simple pendulum-Earth system
-E (total mechanical energy, in Joules) is always constant
-Remember GPE changes w/ height, choose y=0 when pendulum is completely vertical (y=how high above or below zero)
-at y=0: no GPE, but have max velocity so max KE
-at -A or +A: max GPE, no velocity (pendulum stops moving), and max height (so ymax)