CSCI 164 Midterm 1
0.0(0)
Card Sorting
1/130
Earn XP
Description and Tags
Last updated 7:57 PM on 3/8/23
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
131 Terms
1
New cards
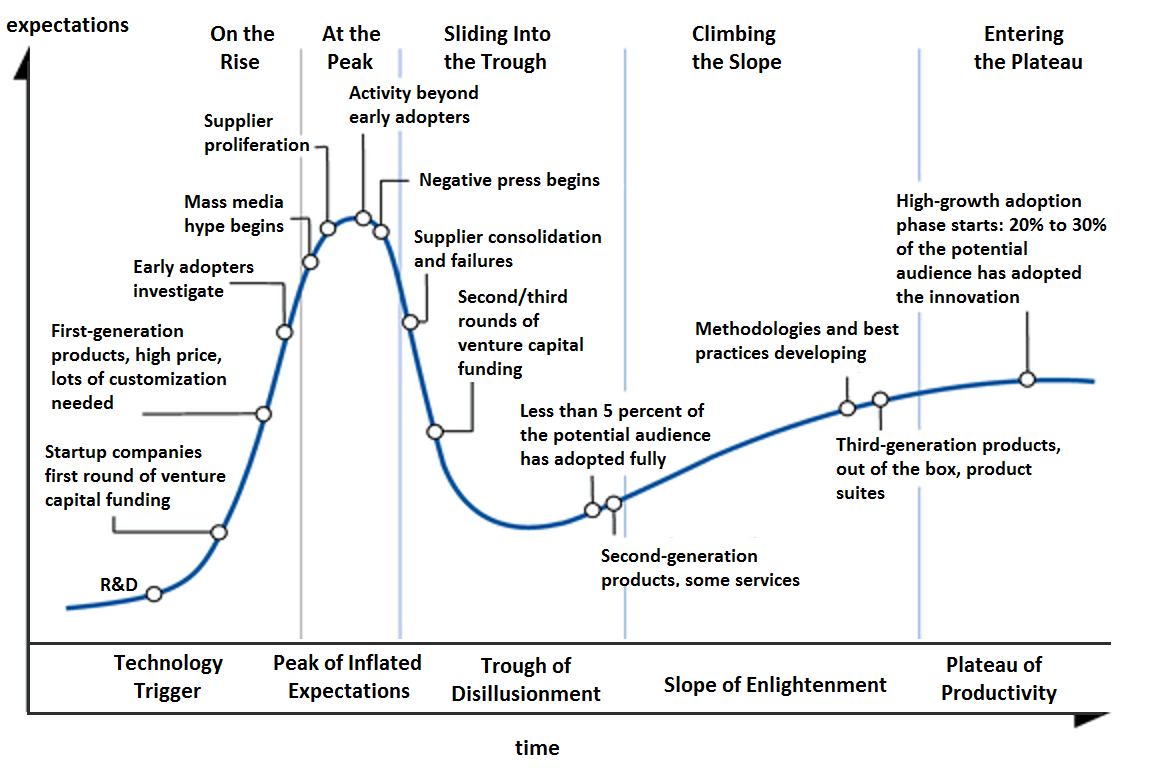
Gartner Hype Cycle
When new technologies make bold promises, how do you discern the hyper from what’s commercially viable? And when will such claims pay off, it at all?
Provides a graphic representation of the maturity and adoption of technologies and applications, and how they are potentially relevant to solving real business problems and exploiting new opportunities
Provides a graphic representation of the maturity and adoption of technologies and applications, and how they are potentially relevant to solving real business problems and exploiting new opportunities
2
New cards
Innovation Trigger
First Phase of Gartner Hype Cycle
A potential technology breakthrough kicks things off
Early proof of concept stories and media interest triggers significant publicity
Often no usable products exist, and commercial viability is unproven
A potential technology breakthrough kicks things off
Early proof of concept stories and media interest triggers significant publicity
Often no usable products exist, and commercial viability is unproven
3
New cards
Peak of Inflated Expectations
Second Phase of Gartner Hyper Cycle
Early publicity produces a number of success stories, often accompanied by scores of failures
Some companies take action; many do not
Early publicity produces a number of success stories, often accompanied by scores of failures
Some companies take action; many do not
4
New cards
Trough of Disillusionment
Third Phase of Gartner Hype Cycle
Interest wanes as experiments and implementations fail to deliver
Producers of the technology shake out or fail
Investments continue only if the surviving providers improve their products to the satisfaction of early adopters
Interest wanes as experiments and implementations fail to deliver
Producers of the technology shake out or fail
Investments continue only if the surviving providers improve their products to the satisfaction of early adopters
5
New cards
Slope of Enlightenment
Fourth Phase of Gartner Hype Cycle
More instances of how the technology can benefit the enterprise start to crystallize and become more widely understood
Second and third generation products appear from technology providers
More enterprises fund pilots, conservative companies remain cautious
More instances of how the technology can benefit the enterprise start to crystallize and become more widely understood
Second and third generation products appear from technology providers
More enterprises fund pilots, conservative companies remain cautious
6
New cards
Plateau of Productivity
Fifth and Final Phase of Gartner Hyper Cycle
Mainstream adoption starts to take off
Criteria for assessing provider viability are more clearly defined
The technology’s broad market applicability and relevance are clearly paying off
Mainstream adoption starts to take off
Criteria for assessing provider viability are more clearly defined
The technology’s broad market applicability and relevance are clearly paying off
7
New cards
1950s-1960s
First AI Boom
“GOFA!”
The age of reasoning, prototype AI developed
“GOFA!”
The age of reasoning, prototype AI developed
8
New cards
1970s
AI Winter 1
9
New cards
1980s-1990s
Second AI Boom
“Expert Systems”
The age of knowledge representation (appearance of expert systems capable of reproducing human decision making)
“Expert Systems”
The age of knowledge representation (appearance of expert systems capable of reproducing human decision making)
10
New cards
1990s
AI Winter 2
11
New cards
2000s-2010s
Third AI Boom
Machine Learning
Deep learning, autonomous vehicles
Machine Learning
Deep learning, autonomous vehicles
12
New cards
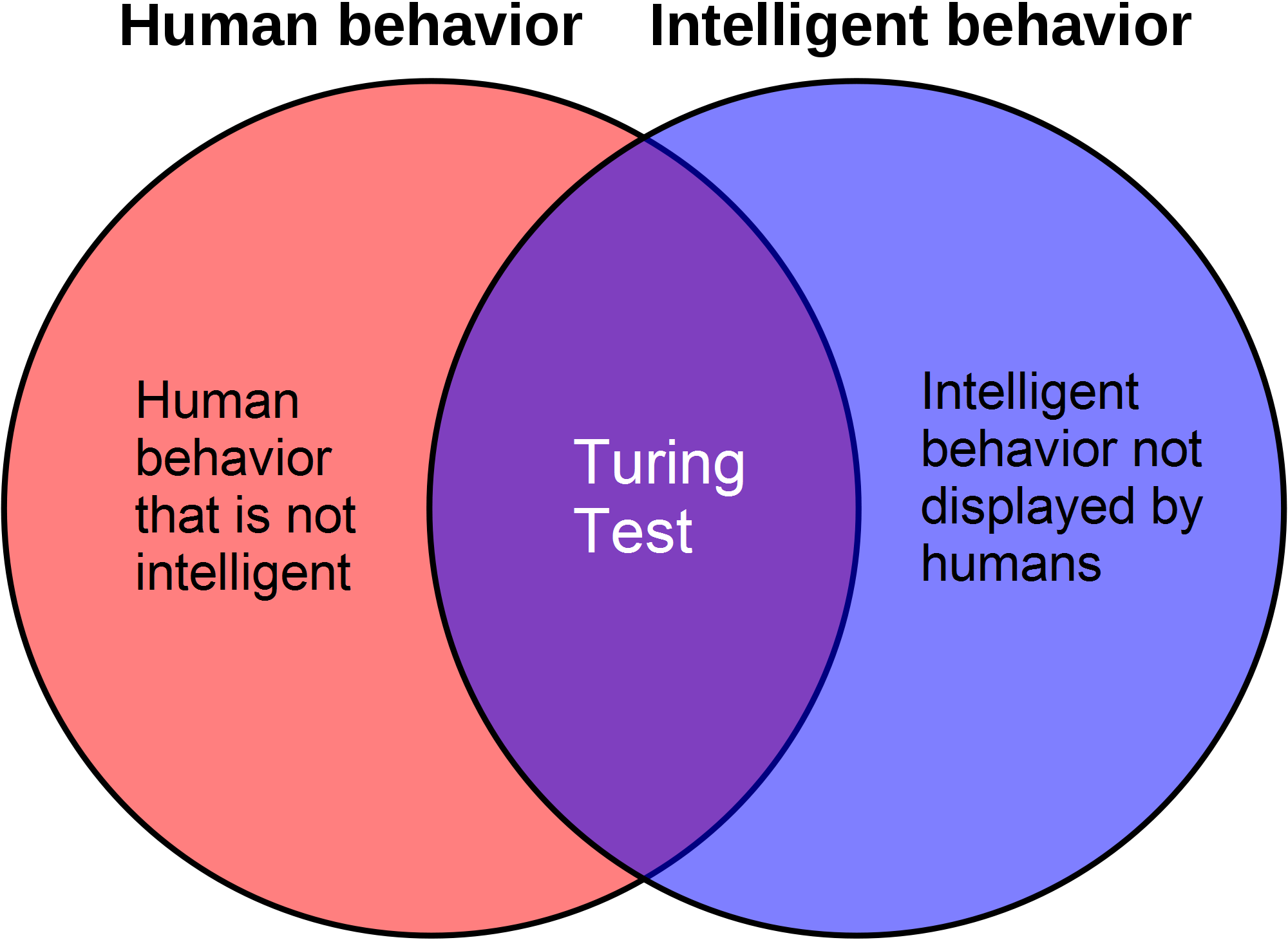
Turing Test
Machines that think
* How to define thinking?
* Machine to carry a conversation
Does not directly test whether the computer behaves intelligently
Tests only whether the computers behaves like a human being.
Test can fail in accurately measure intelligence in 2 ways: Some human behavior is unintelligent, some intelligent behavior is inhuman
Failed to understand the need for knowledge, scalability, to have sensors for getting data
* How to define thinking?
* Machine to carry a conversation
Does not directly test whether the computer behaves intelligently
Tests only whether the computers behaves like a human being.
Test can fail in accurately measure intelligence in 2 ways: Some human behavior is unintelligent, some intelligent behavior is inhuman
Failed to understand the need for knowledge, scalability, to have sensors for getting data
13
New cards
Subsymbolic AI
Model intelligence at a level similar to the neuron
Let such things as knowledge and planning emerge
Let such things as knowledge and planning emerge
14
New cards
Symbolic AI
Manipulation of symbols
Model such things as knowledge and planning in data structures that make sense to the programmers that build them
Based on high-level symbolic (human-readable) representations of problems, logic, and search
Uses tools such as logic programming, production rules, semantic nets and frames, and it developed application like knowledge based systems / expert systems, symbolic mathematics, automated theorem provers, ontologies, the semantic web, and automated planning and scheduling systems
Model such things as knowledge and planning in data structures that make sense to the programmers that build them
Based on high-level symbolic (human-readable) representations of problems, logic, and search
Uses tools such as logic programming, production rules, semantic nets and frames, and it developed application like knowledge based systems / expert systems, symbolic mathematics, automated theorem provers, ontologies, the semantic web, and automated planning and scheduling systems
15
New cards
Counter example
Deductive Reasoning
This type of legitimate data point that refutes a premise that otherwise has a lot of support
Example
* Premise: All primes are odd
* Support: There are infinite number of odd primes
* Counterexample: 2 is prime and is not odd
This type of legitimate data point that refutes a premise that otherwise has a lot of support
Example
* Premise: All primes are odd
* Support: There are infinite number of odd primes
* Counterexample: 2 is prime and is not odd
16
New cards
Outlier
Inductive Reasoning
A data point that represents an unusual event or errant reading, and it does not reflect the overall trends and/or statistics
Example
* Premise: We have a fair coin. There’s a 50/50 chance it comes up heads
* Data: A dozen different experimenters flip the coin 10 times each. The number of heads seen by each: 5, 6, 3, 5,6, 6, 4, 5, 4, 10, 5, 4
* Outlier: Most of the data is within 1 standard deviation of the mean. The 10, however, is more than standard deviations from the mean. This can happen due to random variation, but not very often. Suggests this.
A data point that represents an unusual event or errant reading, and it does not reflect the overall trends and/or statistics
Example
* Premise: We have a fair coin. There’s a 50/50 chance it comes up heads
* Data: A dozen different experimenters flip the coin 10 times each. The number of heads seen by each: 5, 6, 3, 5,6, 6, 4, 5, 4, 10, 5, 4
* Outlier: Most of the data is within 1 standard deviation of the mean. The 10, however, is more than standard deviations from the mean. This can happen due to random variation, but not very often. Suggests this.
17
New cards
Graphs
Widely used in AI
* To model how different objects are connected
* To model a sequence of actions
* To define finite state machines
G = (V, E)
* V = Set of vertices
* E = Set of edges
* To model how different objects are connected
* To model a sequence of actions
* To define finite state machines
G = (V, E)
* V = Set of vertices
* E = Set of edges
18
New cards
Adjacency List
Data structure
Consists of an Array Adj or |V| lists
One list per vertex
For u ∈ V, Adj[u] consists of all vertices adjacent to u
If weighted arcs, then store weights as well
For directed graphs
- Sum of lengths of all is ∑ out-degree(v) \= |E|, number of edges leaving v
For undirected graphs
- Sum of lengths of all is ∑ degree(v) \= 2|E|
Consists of an Array Adj or |V| lists
One list per vertex
For u ∈ V, Adj[u] consists of all vertices adjacent to u
If weighted arcs, then store weights as well
For directed graphs
- Sum of lengths of all is ∑ out-degree(v) \= |E|, number of edges leaving v
For undirected graphs
- Sum of lengths of all is ∑ degree(v) \= 2|E|
![Data structure
Consists of an Array Adj or |V| lists
One list per vertex
For u ∈ V, Adj[u] consists of all vertices adjacent to u
If weighted arcs, then store weights as well
For directed graphs
- Sum of lengths of all is ∑ out-degree(v) \= |E|, number of edges leaving v
For undirected graphs
- Sum of lengths of all is ∑ degree(v) \= 2|E|](https://knowt-user-attachments.s3.amazonaws.com/3a40532f78f147e9bc227cab5b4b7071.jpeg)
19
New cards
O(V + E)
Total storage of an Adjacency List
20
New cards
Advantages of Adjacency list
Space efficient, when a graph is sparse
Can be modified to support many graph types
Can be modified to support many graph types
21
New cards
Disadvantages of Adjacency List
Determining is an edge (u, v) ∈ G: not efficient
Have to search in u's adjacency list -\> O(degree(u)) time
O(V) in the worst case
Have to search in u's adjacency list -\> O(degree(u)) time
O(V) in the worst case
22
New cards
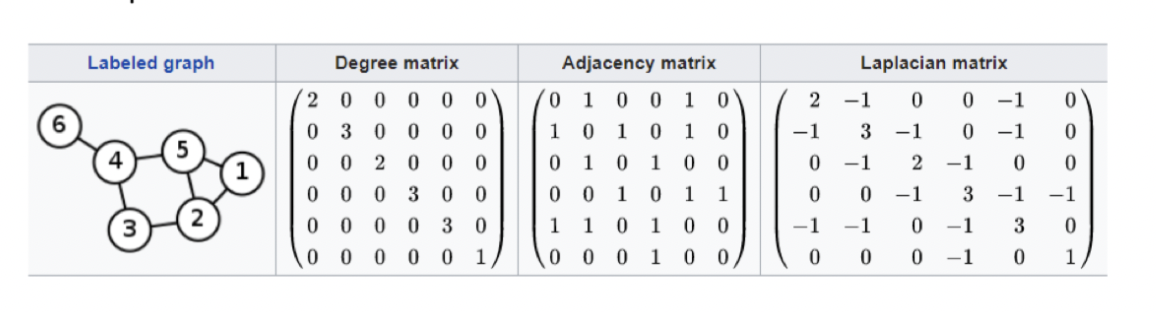
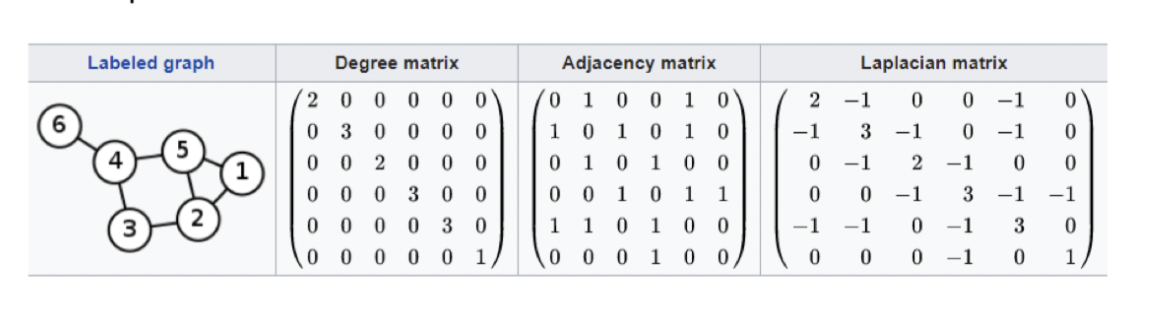
Adjacency Matrix
Matrix A
- Size |V| x |V|
- Number vertices from 1 to |V| in some arbitrary manner
- A is defined by: A[i, j] \= a_ij \= 1 if (i, j) ∈ E, else 0
- Size |V| x |V|
- Number vertices from 1 to |V| in some arbitrary manner
- A is defined by: A[i, j] \= a_ij \= 1 if (i, j) ∈ E, else 0
![Matrix A
- Size |V| x |V|
- Number vertices from 1 to |V| in some arbitrary manner
- A is defined by: A[i, j] \= a_ij \= 1 if (i, j) ∈ E, else 0](https://knowt-user-attachments.s3.amazonaws.com/44520319608d44959f8c5ad66a47a3bb.jpeg)
23
New cards
O(N^2)
Space of an adjacency matrix
24
New cards
O(1)
Edge insertion/deletion for an adjacency matrix
25
New cards
O(N)
Find all adjacent vertices to a vertex for an adjacency matrix
26
New cards
Degree Matrix
Consider a graph G \= (V, E) with |V| \= n
This is a diagonal matrix (size n x n) with d_ij \= Deg(v_ij) if i \= j, else 0
Special case: Directed graph -\> degree \= InDegree or OutDegree
This is a diagonal matrix (size n x n) with d_ij \= Deg(v_ij) if i \= j, else 0
Special case: Directed graph -\> degree \= InDegree or OutDegree
27
New cards
Laplacian Matrix
Consider a graph G with n vertices
This is L_nxm is: L \= D-A
where D is the degree matrix, A is the adjacency matrix
- Simple graph -\> matrix contains only 0 and 1, diagonal \= 0
L_ij \= Deg(v_i) if (i \== j), -1 if i!\=j and v_i is adjacent to v_j, 0 otherwise
This is L_nxm is: L \= D-A
where D is the degree matrix, A is the adjacency matrix
- Simple graph -\> matrix contains only 0 and 1, diagonal \= 0
L_ij \= Deg(v_i) if (i \== j), -1 if i!\=j and v_i is adjacent to v_j, 0 otherwise
28
New cards
Incidence Matrix
A graph whose oriented incidence matrix M
Size |E|x|M| with element M_ev
- For edge e connecting vertex i and j, with i \> j and vertex v given by
M_ev \= 1 if v \== i
M_ev \= -1 if v \== j
M_ev \= 0 otherwise
Size |E|x|M| with element M_ev
- For edge e connecting vertex i and j, with i \> j and vertex v given by
M_ev \= 1 if v \== i
M_ev \= -1 if v \== j
M_ev \= 0 otherwise
29
New cards
Affinity Matrix
Also known as Similarity Matrix
An essential statistical technique used to organize the mutual similarities between a set of data points
Similarity is similar to distance but it does not satisfy the properties of a metric
- 2 points that are the same will have a similarity score of 1 while computing the metric will result in 0
- Similarity measure can be interpreted as the probability that 2 points are related
- If data points have coordinates that are close, then their similarity score will be much closer to 1 than 2 data points with a lot of space between them
Examples: Smart informational retrieval, advanced genetic research, efficient data mining, semi-supervised learning
An essential statistical technique used to organize the mutual similarities between a set of data points
Similarity is similar to distance but it does not satisfy the properties of a metric
- 2 points that are the same will have a similarity score of 1 while computing the metric will result in 0
- Similarity measure can be interpreted as the probability that 2 points are related
- If data points have coordinates that are close, then their similarity score will be much closer to 1 than 2 data points with a lot of space between them
Examples: Smart informational retrieval, advanced genetic research, efficient data mining, semi-supervised learning
30
New cards
Graphs in AI
G \= (V, E)
V: locations, positions in a map
E: roads, possible paths between locations
Weight of the edge (v_i, v_j):
- Cost to go from v_i to v_j: it can be the Euclidean distance
Applications: Video games, maps
V: locations, positions in a map
E: roads, possible paths between locations
Weight of the edge (v_i, v_j):
- Cost to go from v_i to v_j: it can be the Euclidean distance
Applications: Video games, maps
31
New cards
Map
Graph of positions
Vertices: Cells on the map \= squares, hexagons
Edges: Connections to the cells in the neighborhood + special cases
Able to connect neighbors with Euclidean or Manhattan distance
Vertices: Cells on the map \= squares, hexagons
Edges: Connections to the cells in the neighborhood + special cases
Able to connect neighbors with Euclidean or Manhattan distance
32
New cards
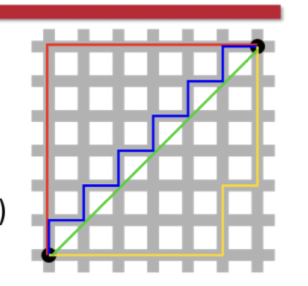
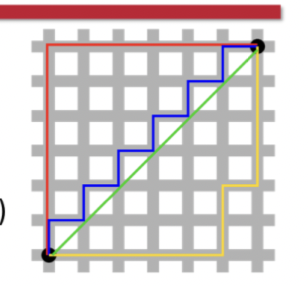
Manhattan Distance
A measure of travel through a grid system like navigating around the buildings and blocks of Manhattan, NYC.
D = |x1 - x2| + |y1 - y2|
Red, Yellow, Blue lines
D = |x1 - x2| + |y1 - y2|
Red, Yellow, Blue lines
33
New cards
Euclidean Distance
A method of distance measurement using the straight line mileage between two places. D = √((x2- x1)^2 + (y2 - y1)^2)
Green line
Green line
34
New cards
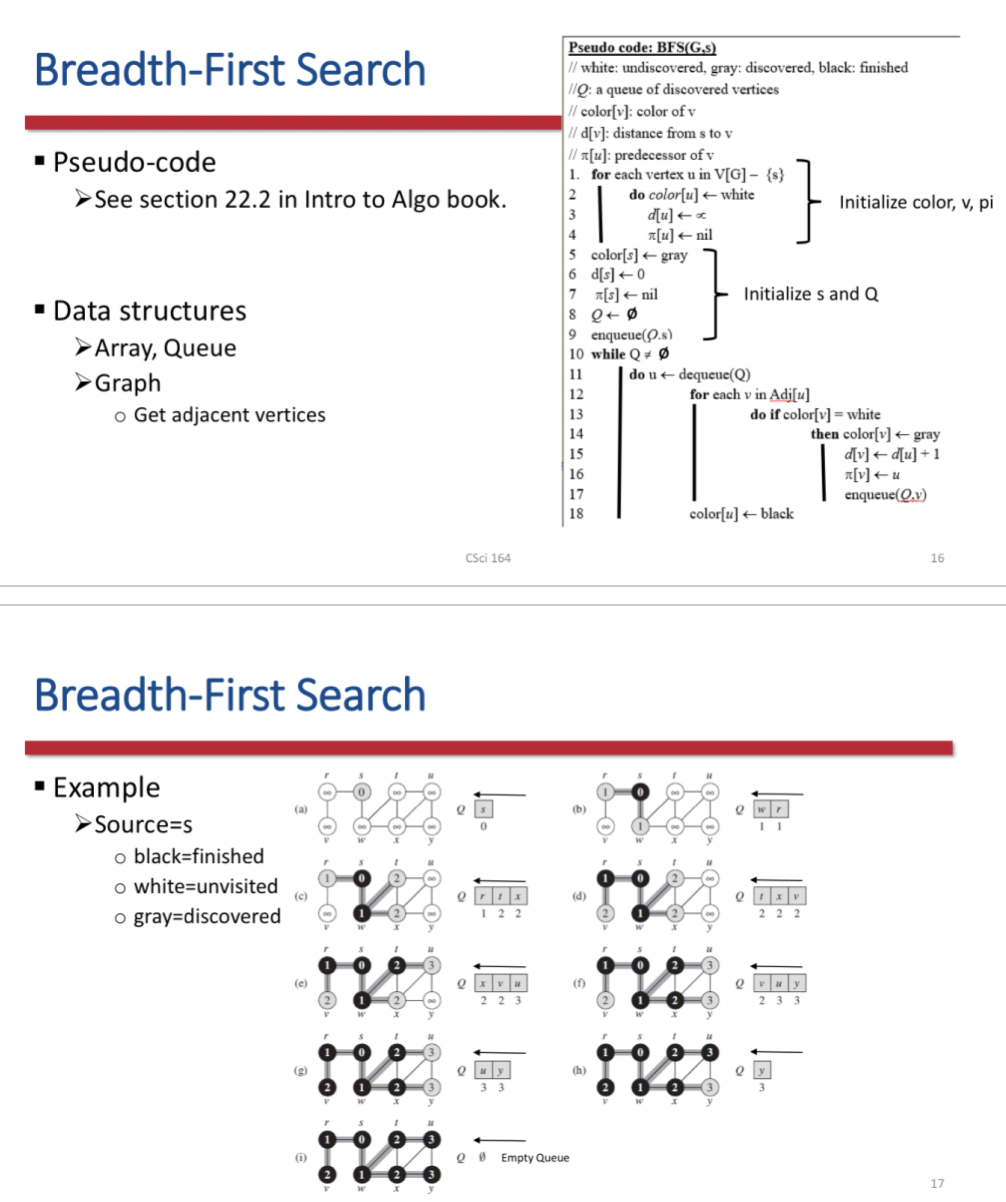
Breadth First Search
Algorithm for search a tree data structure for a node that satisfies a given property
- Starts a tree root (defined by the user) and explores all nodes at the present depth prior to moving on to the nodes and the next depth level
- Use a queue (FIFO) is needed to keep track of the child nodes that have been visited but not yet explored
Goal: Can be used to attempt to visit all nodes of a graph in a systematic manner
Input: Graph, directed or undirected, weighted or unweighted
Starts with a given node, then visits nodes adjacent in some specified order
Implementation
- Maintain an enqueued array
- Visit node after dequeued
- Then enqueue unenqueued nodes adjacent to the node
- Starts a tree root (defined by the user) and explores all nodes at the present depth prior to moving on to the nodes and the next depth level
- Use a queue (FIFO) is needed to keep track of the child nodes that have been visited but not yet explored
Goal: Can be used to attempt to visit all nodes of a graph in a systematic manner
Input: Graph, directed or undirected, weighted or unweighted
Starts with a given node, then visits nodes adjacent in some specified order
Implementation
- Maintain an enqueued array
- Visit node after dequeued
- Then enqueue unenqueued nodes adjacent to the node
35
New cards
Use of BFS
AI Example: A chess game
1) A chess engine may build the game tree from the current position by applying all possible moves
2) Use a BFS to find a win position for white
- Implicit trees (like game trees or other problem solving trees) may be of infinite sizes
- BFS is guaranteed to find a solution node if it exists
Is a shortest path algorithm for unweighted graphs
1) A chess engine may build the game tree from the current position by applying all possible moves
2) Use a BFS to find a win position for white
- Implicit trees (like game trees or other problem solving trees) may be of infinite sizes
- BFS is guaranteed to find a solution node if it exists
Is a shortest path algorithm for unweighted graphs
36
New cards
O(V+E)
Initialization takes O(V)
Total time for queuing is O(V)
The sum of lengths of all adjacency lists is O(E)
Run time of BFS
Total time for queuing is O(V)
The sum of lengths of all adjacency lists is O(E)
Run time of BFS
37
New cards
Predecessor subgraph
For a graph G \= (V, E) with source s
This of G is G_𝜋 \= (V_𝜋, E_𝜋) where
V_𝜋 \= {v∈V: 𝜋[v] ≠ NIL|} ∪ {s}
E_𝜋 \= {(𝜋[v], v)∈E: v ∈ V_𝜋 - {s}}
Is a BF Tree is
- V_𝜋 consists of the vertices reachable from s
- ∀ v ∈ V, ∃! simple path from s to v in G_𝜋 that is also a shortest path from s to v in G
The edges in E_𝜋 are called Tree edges
- |E_𝜋| \= |V_𝜋| - 1
This of G is G_𝜋 \= (V_𝜋, E_𝜋) where
V_𝜋 \= {v∈V: 𝜋[v] ≠ NIL|} ∪ {s}
E_𝜋 \= {(𝜋[v], v)∈E: v ∈ V_𝜋 - {s}}
Is a BF Tree is
- V_𝜋 consists of the vertices reachable from s
- ∀ v ∈ V, ∃! simple path from s to v in G_𝜋 that is also a shortest path from s to v in G
The edges in E_𝜋 are called Tree edges
- |E_𝜋| \= |V_𝜋| - 1
38
New cards
BFS Graph compression
Only 1 edge between a sequence of vertices
Detect hallways
Consider the type of connection between 2 vertices
- Mapping to the 2D or 3D environment
Isolate the key points, where the agents must go and potential intersections
Detect hallways
Consider the type of connection between 2 vertices
- Mapping to the 2D or 3D environment
Isolate the key points, where the agents must go and potential intersections
39
New cards
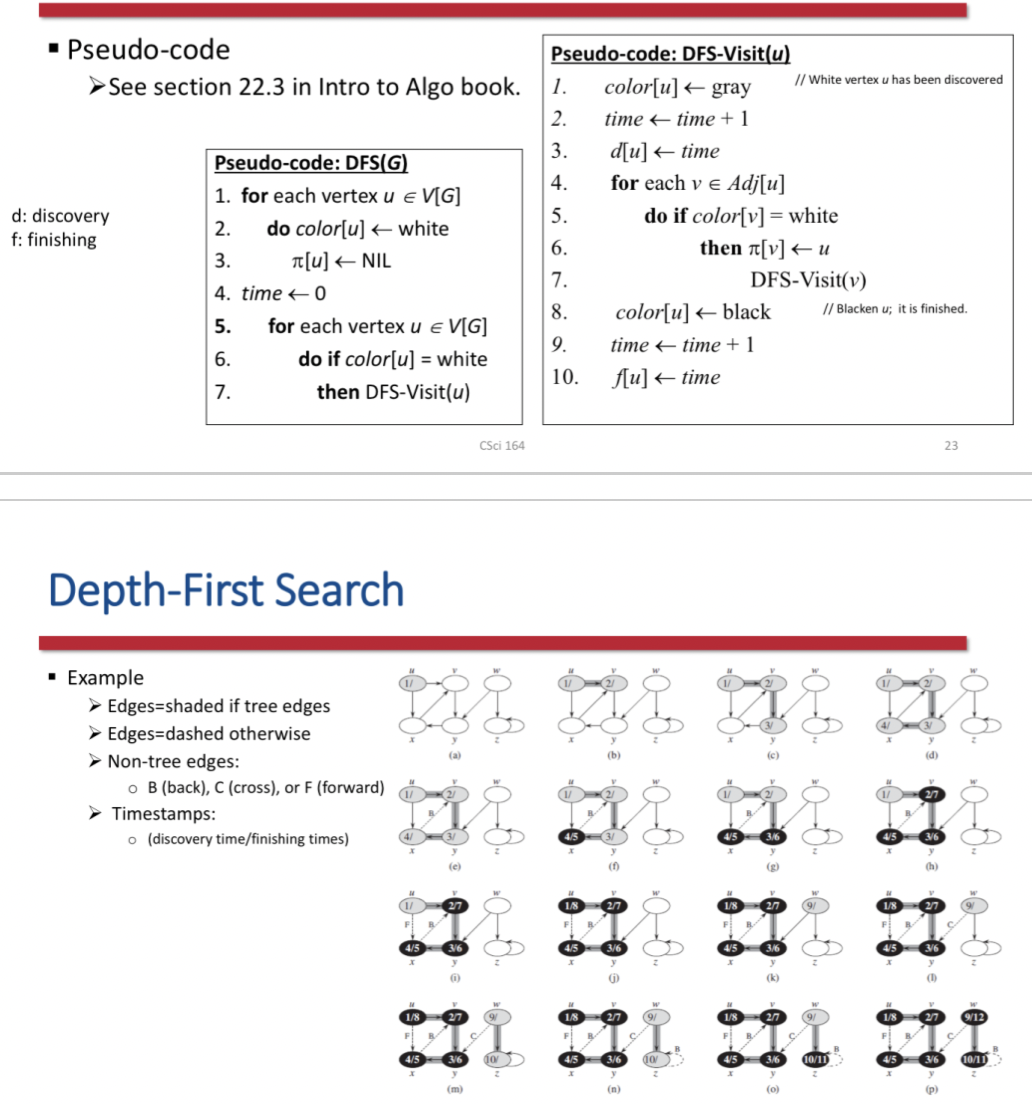
Depth First Search
Goal: To attempt to visit all nodes of a graph in a systematic manner
Input: Graph, directed or undirected, weighted or unweighted
Steps
- Explore edges out of the most recently discovered vertex v
- When all edges of v have been explored, back track to explore other edges leaving the vertex from which v was discovered (its predecessor)
- Search as deep as possible first
- Continue until all vertices reachable from the original source are discovered; If any undiscovered vertices remain, then one of them is chosen as a new source and search is repeated from that source
Input: Graph, directed or undirected, weighted or unweighted
Steps
- Explore edges out of the most recently discovered vertex v
- When all edges of v have been explored, back track to explore other edges leaving the vertex from which v was discovered (its predecessor)
- Search as deep as possible first
- Continue until all vertices reachable from the original source are discovered; If any undiscovered vertices remain, then one of them is chosen as a new source and search is repeated from that source
40
New cards
Shortest Paths
Problem: Find the sequence of vertices and edges in a graph G \= (V, E) from vertex start to vertex end
Rationale: To not test all possible paths
Property: A shortest path between 2 vertices contains other shortest paths within it
Rationale: To not test all possible paths
Property: A shortest path between 2 vertices contains other shortest paths within it
41
New cards
Weighted Directed Graph
G \= (V, E)
Weight function w: E -\> R (set of real numbers)
- Mapping of edges to real-valued weights
- w(p) of path \=
Weight function w: E -\> R (set of real numbers)
- Mapping of edges to real-valued weights
- w(p) of path \=
42
New cards
Single destination shortest path
Find a shortest path to a given destination vertex t from each vertex v
By reversing the direction of each edge in the graph, we can reduce this problem to a single-source problem
By reversing the direction of each edge in the graph, we can reduce this problem to a single-source problem
43
New cards
Single pair shortest path
Find a shortest path from u to v for given vertices u and v
If we solve the single source problem with source vertex u, this problem is also solved
All known algorithms for this problem have the same worst-case asymptotic running time as the best single source algorithms
If we solve the single source problem with source vertex u, this problem is also solved
All known algorithms for this problem have the same worst-case asymptotic running time as the best single source algorithms
44
New cards
All pairs shortest paths
Find a shortest path from u to v for every pair of vertices u and v
Although we can solve this problem by running a single source algorithm once from each vertex, we usually can solve it faster
Although we can solve this problem by running a single source algorithm once from each vertex, we usually can solve it faster
45
New cards
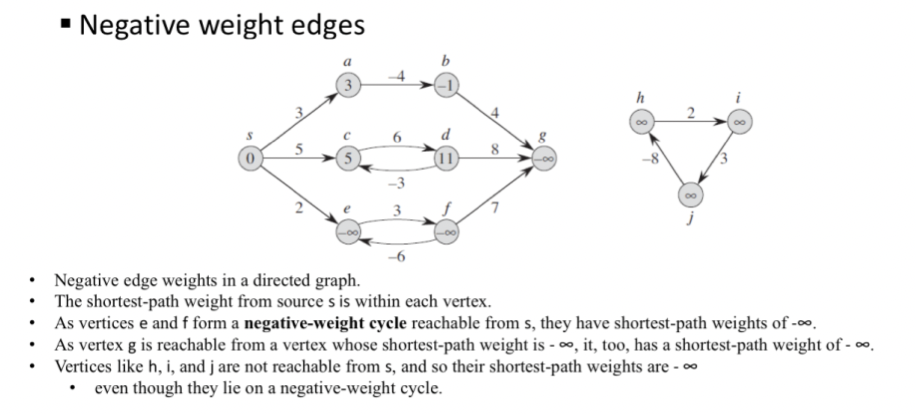
Special cases of shortest path
Cannot contain negative weight cycles
Cannot contain a positive weight cycle because removing the cycle from the path produces a path with the same source and destination vertices and a lower path weight
Cannot contain a positive weight cycle because removing the cycle from the path produces a path with the same source and destination vertices and a lower path weight
46
New cards
Representation of shortest paths
Let G \= (V, E)
- For each vertex v ∈ V a predecessor v.𝜋 (another vertex or NIL)
The shortest paths algorithms set the 𝜋 attributes so that the chain of predecessors origination at a vertex v runs backwards along a shortest path from s to v
Same as Breadth First Search
- predecessor subgraph G_𝜋 \= (V_𝜋, E_𝜋 induced by the values
- V_𝜋: the set of vertices of G_𝜋 with non NIL predecessors _ the source s
- V_𝜋 \= {v∈V: 𝜋[v] ≠ NIL|} ∪ {s}
- E_𝜋: the set of edges induced by the values for vertices
- E_𝜋 \= {(𝜋[v], v)∈E: v ∈ V_𝜋 - {s}}
Let G \= (V, E)
- A weighted, directed graph with weight function w: E -\> R
- AssumptionL G contains no negative weight cycles reachable from the source vertex s∈V (for well defined shortest paths)
- For each vertex v ∈ V a predecessor v.𝜋 (another vertex or NIL)
The shortest paths algorithms set the 𝜋 attributes so that the chain of predecessors origination at a vertex v runs backwards along a shortest path from s to v
Same as Breadth First Search
- predecessor subgraph G_𝜋 \= (V_𝜋, E_𝜋 induced by the values
- V_𝜋: the set of vertices of G_𝜋 with non NIL predecessors _ the source s
- V_𝜋 \= {v∈V: 𝜋[v] ≠ NIL|} ∪ {s}
- E_𝜋: the set of edges induced by the values for vertices
- E_𝜋 \= {(𝜋[v], v)∈E: v ∈ V_𝜋 - {s}}
Let G \= (V, E)
- A weighted, directed graph with weight function w: E -\> R
- AssumptionL G contains no negative weight cycles reachable from the source vertex s∈V (for well defined shortest paths)
![Let G \= (V, E)
- For each vertex v ∈ V a predecessor v.𝜋 (another vertex or NIL)
The shortest paths algorithms set the 𝜋 attributes so that the chain of predecessors origination at a vertex v runs backwards along a shortest path from s to v
Same as Breadth First Search
- predecessor subgraph G_𝜋 \= (V_𝜋, E_𝜋 induced by the values
- V_𝜋: the set of vertices of G_𝜋 with non NIL predecessors _ the source s
- V_𝜋 \= {v∈V: 𝜋[v] ≠ NIL|} ∪ {s}
- E_𝜋: the set of edges induced by the values for vertices
- E_𝜋 \= {(𝜋[v], v)∈E: v ∈ V_𝜋 - {s}}
Let G \= (V, E)
- A weighted, directed graph with weight function w: E -\> R
- AssumptionL G contains no negative weight cycles reachable from the source vertex s∈V (for well defined shortest paths)](https://knowt-user-attachments.s3.amazonaws.com/1f0beb7305c846ddbbd63f116f8e9ae3.jpeg)
47
New cards
Shortest Path tree
Same as BFS tree but contains shortest paths from the source defined in terms of edge weights instead of numbers of edges
A directed subgraph G \= (V', E') with V' ⊆ V and E' ⊆ E
- V' is the set of vertices reachable from S in G
- G' forms a rooted tree with root s
- For all v∈V' the unique simple path from s to v in G' is a shortest path from s to v in G
A directed subgraph G \= (V', E') with V' ⊆ V and E' ⊆ E
- V' is the set of vertices reachable from S in G
- G' forms a rooted tree with root s
- For all v∈V' the unique simple path from s to v in G' is a shortest path from s to v in G
48
New cards
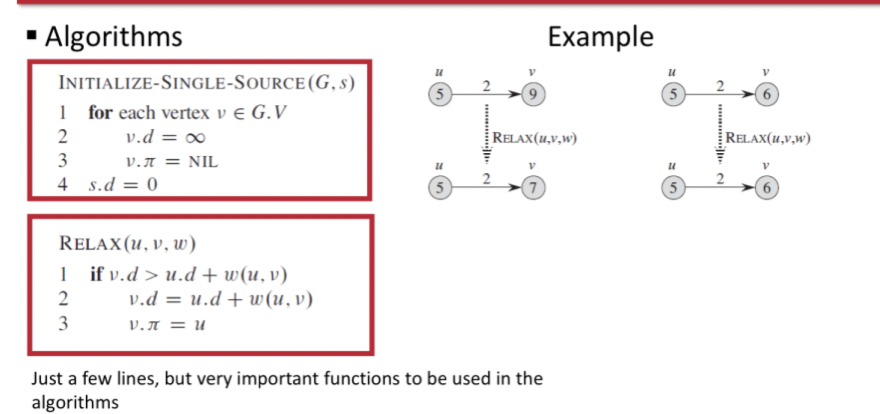
Relaxation
For each vertex v ∈ V we maintain an attribute v.d, an upper bound on the weight of the shortest path from source s to v
- v.d \= shortest-path estimate
Principle: Process of relaxing an edge (u, v) consists of testing whether we can improve the shortest path to v found so far by going through u and, if so, updating v.d and v.𝜋
- v.d \= shortest-path estimate
Principle: Process of relaxing an edge (u, v) consists of testing whether we can improve the shortest path to v found so far by going through u and, if so, updating v.d and v.𝜋
49
New cards
Triangle Inequality
Relaxation Property
For any edge (u, v) ∈ E, we have 𝛿(u, v) ≤ 𝛿(s, u) + w(u, v)
For any edge (u, v) ∈ E, we have 𝛿(u, v) ≤ 𝛿(s, u) + w(u, v)
50
New cards
Upper bound property
Relaxation property
We always have v.d ≤ 𝛿(s, v) for all vertices v ∈ V
Once v.d achieves the value 𝛿(s, v) it never changes
We always have v.d ≤ 𝛿(s, v) for all vertices v ∈ V
Once v.d achieves the value 𝛿(s, v) it never changes
51
New cards
No path property
Relaxation Property
If there is no path from s to v, then we always have v.d \= 𝛿(s, v) \= infinity
If there is no path from s to v, then we always have v.d \= 𝛿(s, v) \= infinity
52
New cards
Convergence Property
Relaxation Property
If s-\>u -\> v is a shortest path in G for some u, v ∈ V, and is u.d \= 𝛿(s, u) at anytime prior to relaxing edge (u, v) then v.d \= 𝛿(s, u) at all times afterward
If s-\>u -\> v is a shortest path in G for some u, v ∈ V, and is u.d \= 𝛿(s, u) at anytime prior to relaxing edge (u, v) then v.d \= 𝛿(s, u) at all times afterward
53
New cards
Path relaxation property
Relaxation Property
If p \=
If p \=
54
New cards
Predecessor Subgraph property
Once v.d \= 𝛿(s, v) for all v ∈V, the predecessor subgraph is a shortest paths tree rooted at s
55
New cards
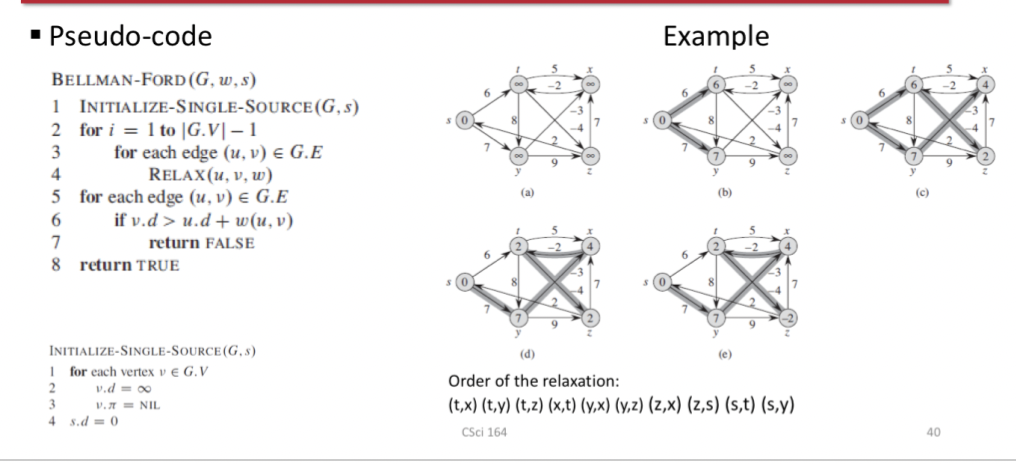
Bellman Ford Algorithm
Features
- Detects whether a negative weight cycle is reachable from the source
- Returns a Boolean value (true or false): whether or not there is a negative weight cycle that is reachable from the source
Principle: Relaxes edges, progressively decreasing an estimate v.d on the weight of a shortest path from the source s to each vertex v until it achieves the shortest path weight from s
Complexity: O(VE)
- Detects whether a negative weight cycle is reachable from the source
- Returns a Boolean value (true or false): whether or not there is a negative weight cycle that is reachable from the source
Principle: Relaxes edges, progressively decreasing an estimate v.d on the weight of a shortest path from the source s to each vertex v until it achieves the shortest path weight from s
Complexity: O(VE)
56
New cards
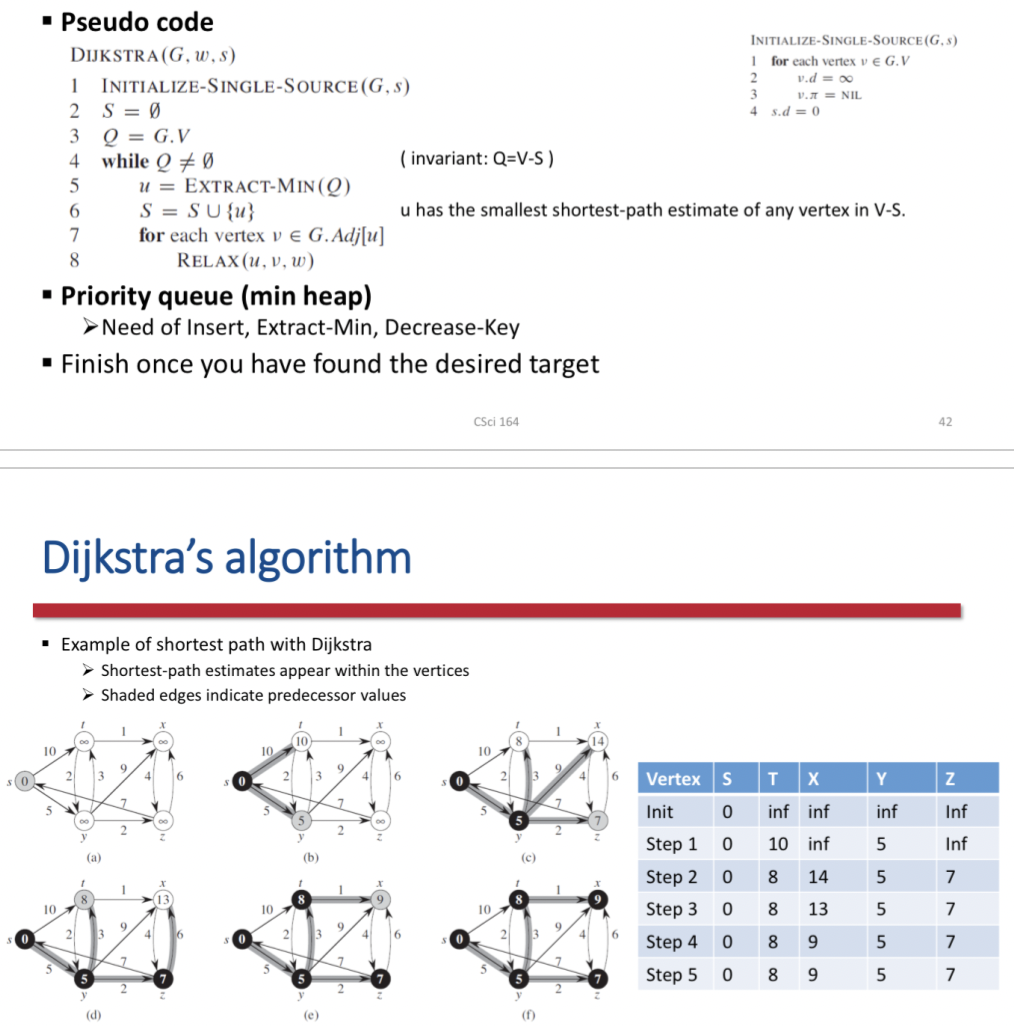
Dijkstra's Algorithm
Greedy algorithm
- Always choose the lightest or closest vertex in V-s to add to set S
- Does computer shortest path
Edge weights in the input graph are non negative
- w(u, v) \>\= 0 for each edge (u, v) ∈ E
Principle
- Repeatedly select the vertex u∈V-S with the minimum shortest-path estimate
- Adds u to S
- Relaxes all edges leaving u
Data structure: Min priority queue of vertices (Q)
- Vertex added/removed from Q: only 1 time
To show that it's correct
- u.d \= 𝛿(s, u) for all vertices u ∈ V
- Always choose the lightest or closest vertex in V-s to add to set S
- Does computer shortest path
Edge weights in the input graph are non negative
- w(u, v) \>\= 0 for each edge (u, v) ∈ E
Principle
- Repeatedly select the vertex u∈V-S with the minimum shortest-path estimate
- Adds u to S
- Relaxes all edges leaving u
Data structure: Min priority queue of vertices (Q)
- Vertex added/removed from Q: only 1 time
To show that it's correct
- u.d \= 𝛿(s, u) for all vertices u ∈ V
57
New cards
h(n)
Heuristic Function
Estimated cost of the cheapest path from the state at node n to a goal state
Estimated cost of the cheapest path from the state at node n to a goal state
58
New cards
Heuristic
Technique designed for solving a problem more quickly when classic methods are too slow, or for finding an approximative solution when classic methods fail to find any exact solution
Goal: To obtain a good enough solution in a reasonable time frame
When to Use: Optimality, Completeness, Accuracy and precision, Execution time
Goal: To obtain a good enough solution in a reasonable time frame
When to Use: Optimality, Completeness, Accuracy and precision, Execution time
59
New cards
Greedy best first search (GBF)
\n Goal is to expand the node that is closest to the goal , on the grounds that this is likely to lead to a solution quickly
Evaluates nodes by using just the heuristic function
f(n) = h(n)
Evaluates nodes by using just the heuristic function
f(n) = h(n)
60
New cards
A\* Search
Evaluates nodes by combining g(n), the cost to reach the node, and h(n) the cost to get from the node to the goal
f(n) = g(n) + h(n) = estimated cost of the cheapest solution through n
Both complete an optimal
Similar to Dijkstra's shortest path but add h(n) to the cost of the shortest path
Tree search version is optimal if h(n) is admissible
Graph search version is optimal if h(n) is consistent
f(n) = g(n) + h(n) = estimated cost of the cheapest solution through n
Both complete an optimal
Similar to Dijkstra's shortest path but add h(n) to the cost of the shortest path
Tree search version is optimal if h(n) is admissible
Graph search version is optimal if h(n) is consistent
61
New cards
Admissibility
Condition 1 for Optimality of A\* search
Never overestimates the cost to reach the goal
Optimistic because they think the cost of solving a problem is less than it actually is
Never overestimates the cost to reach the goal
Optimistic because they think the cost of solving a problem is less than it actually is
62
New cards
Consistency
Condition 2 for optimality of A\* Search
For every node n and every successor n' or n generated by any action a, the estimated cost of reaching the goal from n is greater than the step cost of getting to n plus the estimated cost of reaching the goal from n'
h(n) ≤ c(n, a, n') + h(n')
A form of the general triangle inequality, which stipulates that each side of a triangle cannot be longer than the sum of the other 2 sides
The triangle is formed by n, n', and the goal G_n closes to n
For every node n and every successor n' or n generated by any action a, the estimated cost of reaching the goal from n is greater than the step cost of getting to n plus the estimated cost of reaching the goal from n'
h(n) ≤ c(n, a, n') + h(n')
A form of the general triangle inequality, which stipulates that each side of a triangle cannot be longer than the sum of the other 2 sides
The triangle is formed by n, n', and the goal G_n closes to n
63
New cards
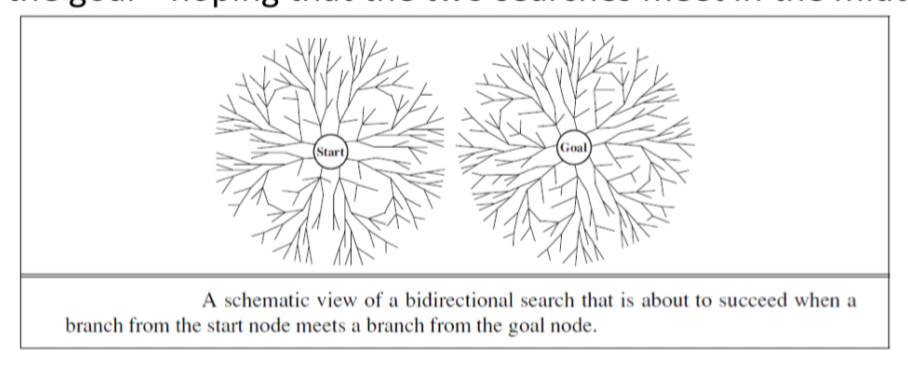
Bidirectional Search
Run two simultaneous searches, one forward from the initial states and the other backward from the goal, hoping the two searches meet in the middle
Implemented by replacing the goal test with a check to see whether the frontiers of the 2 searches intersect, if they do a solution has been found
Weakness is the space requirement
Implemented by replacing the goal test with a check to see whether the frontiers of the 2 searches intersect, if they do a solution has been found
Weakness is the space requirement
64
New cards
Uninformed Search Methods
Have access only to the problem definition
BFS: Expands the shallowest nodes first; complete, optimal for unit sep costs, exponential space complexity
Dijkstra: Uniform cost search expands the node with lowest path cost, g(n), and is optimal for general step cost
DFS: Expands the deepest unexpanded node first, incomplete, not optimal, has linear space complexity
BFS: Expands the shallowest nodes first; complete, optimal for unit sep costs, exponential space complexity
Dijkstra: Uniform cost search expands the node with lowest path cost, g(n), and is optimal for general step cost
DFS: Expands the deepest unexpanded node first, incomplete, not optimal, has linear space complexity
65
New cards
Informed Search Methods
May have access to a heuristic function h(n), estimates the cost of a solution from n
Greedy best first search: Expands nodes with minimal h(n), not optimal but most efficient, f(n) = h(n)
A\* search: Expands nodes with minimal f(n) = g(n) + h(N), complete and optimal, space complexity is prohibitive
Greedy best first search: Expands nodes with minimal h(n), not optimal but most efficient, f(n) = h(n)
A\* search: Expands nodes with minimal f(n) = g(n) + h(N), complete and optimal, space complexity is prohibitive
66
New cards
Adversarial Games
Competitive environments, in which the agents' goals are in conflict
Deterministic, fully oberservable environments where 2 agent act alternately and in which the utility value at the end of the game are always equal and opposite
Deterministic, fully oberservable environments where 2 agent act alternately and in which the utility value at the end of the game are always equal and opposite
67
New cards
Cooperative Game
Players should adopt a certain strategy through negotiations and agreements between players
68
New cards
Non-cooperative game
Game where players cannot form alliances or if all agreements need to be self-enforcing
69
New cards
Symmetric Game
Game where the payoffs for playing a particular strategy depend only on the other strategies employed, not on who is playing them
70
New cards
Asymmetric Game
Game where each player begins the game differently than everyone else
While the winning conditions are the same for everyone, each player will be pursuing very different paths to achieve that goal
While the winning conditions are the same for everyone, each player will be pursuing very different paths to achieve that goal
71
New cards
Zero sum game
Game where choices by players can neither increase nor decrease the available resources
Total benefit goes to all players in a game, for every combination of strategies, always adds to zero (more informally, a player benefits only at the equal expense of others)
Total benefit goes to all players in a game, for every combination of strategies, always adds to zero (more informally, a player benefits only at the equal expense of others)
72
New cards
Simultaneous game
Games where both players move simultaneously, or instead the later players are unaware of the earlier players' actions
73
New cards
Sequential Games
Also known as dynamic games
Games where later players have some knowledge about earlier actions. This need be perfect information about every action of earlier players; might be very little knowledge
A player may know that an earlier player did not perform one particular actions, while they do not know which of the other available actions the first player performed
Games where later players have some knowledge about earlier actions. This need be perfect information about every action of earlier players; might be very little knowledge
A player may know that an earlier player did not perform one particular actions, while they do not know which of the other available actions the first player performed
74
New cards
Perfect Information
A game where all players, at every move in the game, know the moves previously made by all other players
Example: Firms and consumers having information about the price and quality of all the available goods in a market, Tic Tac Te, checkers, chess
Example: Firms and consumers having information about the price and quality of all the available goods in a market, Tic Tac Te, checkers, chess
75
New cards
Imperfect Information
A game where the players do not know all moves already made by the opponent such as a simultaneous move game
Example: Many card games
Example: Many card games
76
New cards
Game Definition
Games with 2 players (MAX and MIN)
MAX moves first and then they take turns moving until the game is over. At the end of the game, points are awarded to the winning player and penalties to the loser
Game has s_0, Player(s), Action(s), Result(s, a), Terminal-Test(s), and Utility(s, p)
MAX moves first and then they take turns moving until the game is over. At the end of the game, points are awarded to the winning player and penalties to the loser
Game has s_0, Player(s), Action(s), Result(s, a), Terminal-Test(s), and Utility(s, p)
77
New cards
s_0
The initial state of a game
Specifies how the game is set up to start
Specifies how the game is set up to start
78
New cards
Player(s)
Defines which player has the move in a state of a game
79
New cards
Actions(s)
Returns the set of legal moves in a state of a game
80
New cards
Terminal-Test(s)
A terminal test, which is true when the game is over and false otherwise
States where the game has ended
States where the game has ended
81
New cards
Utility(s, p)
A utility function (also called objective function or payoff function) defines the final numeric value for a game that ends in terminal state s for a player p
82
New cards
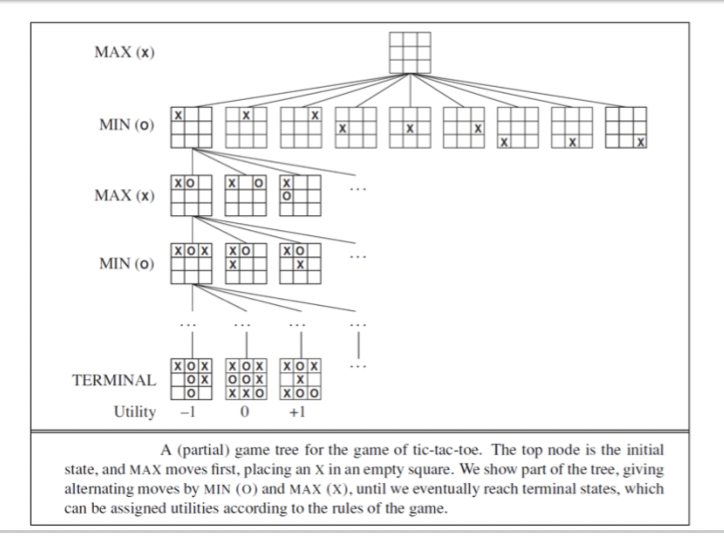
Game Tree
ACTIONS function and RESULT function define this of a game
A tree where the nodes are game states, and the edges are moves
A tree where the nodes are game states, and the edges are moves
83
New cards
Tic Tac Toe
From the initial state, MAX has 9 possible moves
Game tree is relatively small - fewer that 9! \= 262, 880 terminal nodes
Game tree is relatively small - fewer that 9! \= 262, 880 terminal nodes
84
New cards
Optimal Decision
In adversarial search, MIN has something to say about finding the sequence of actions leading to a goal state
MAX must find a contingent strategy that specifies MAX's moves in the initial state, then MAX's moves in the states resulting from every possible response by MIN, then MAX's moves in the states resulting from every possible response by MIN to those moves
Leads to outcome at least as good as any other strategy when one is playing an infallible opponent
MAX must find a contingent strategy that specifies MAX's moves in the initial state, then MAX's moves in the states resulting from every possible response by MIN, then MAX's moves in the states resulting from every possible response by MIN to those moves
Leads to outcome at least as good as any other strategy when one is playing an infallible opponent
85
New cards
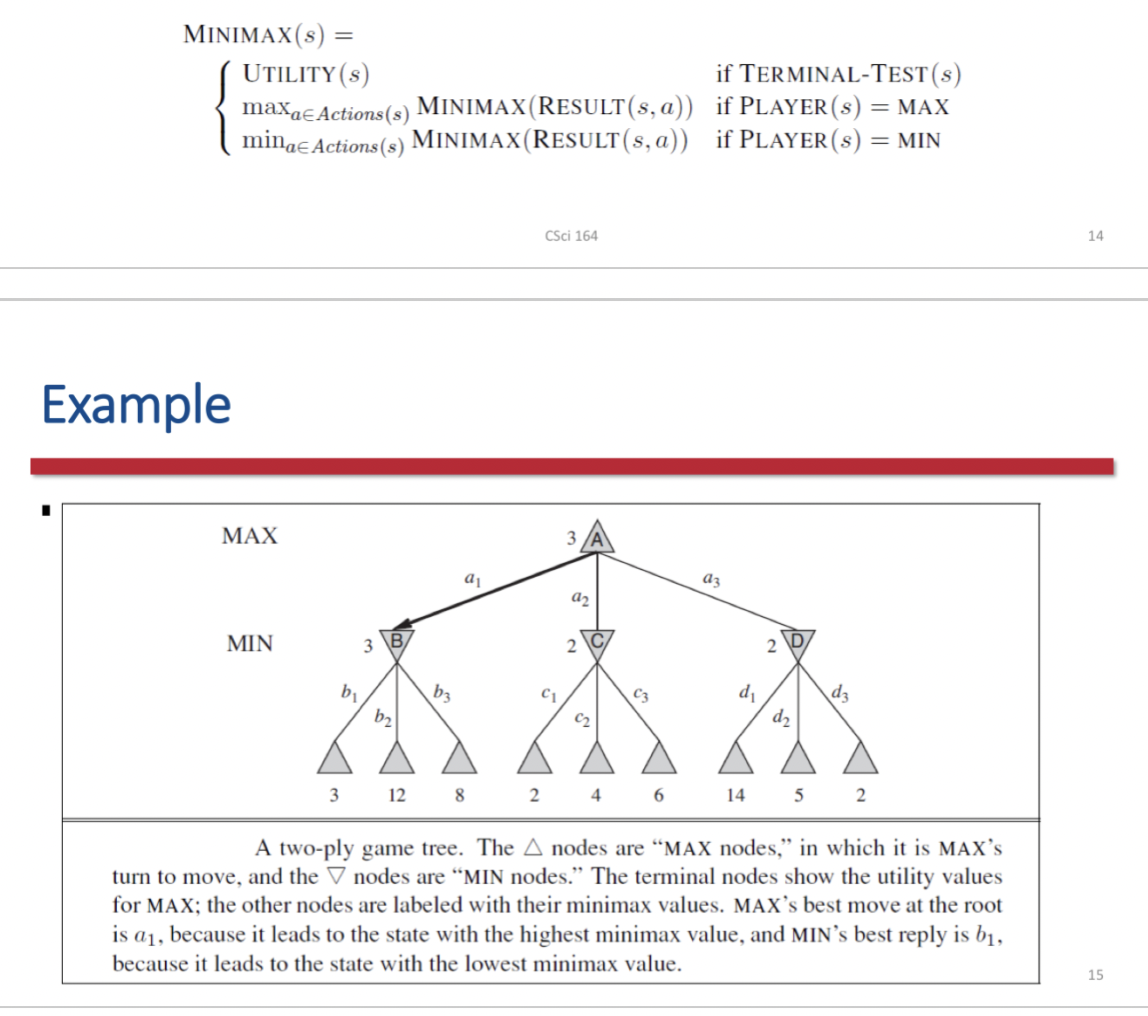
Minimax
Given a game tree, the optimal strategy can be determined from the minimax value of each node, which we write as MINIMAX(n)
The minimax value of a node is the utility (for MAX) of being in the corresponding state, assuming that both players play optimally from there to the end of the game
Minimax value of a terminal state is just it's utility
Given a choice, MAX prefers to move to a state of maximum value, whereas MIN prefers a state of minimum value
The minimax value of a node is the utility (for MAX) of being in the corresponding state, assuming that both players play optimally from there to the end of the game
Minimax value of a terminal state is just it's utility
Given a choice, MAX prefers to move to a state of maximum value, whereas MIN prefers a state of minimum value
86
New cards
Minimax Algorithm
Computers the minimax decision from the current state
Recursion proceeds all the way down to the leaves of the tree, and then the minimax values are backed up through the tree as the recursion unwinds
Performs a complete depth-first exploration of the game tree
Recursion proceeds all the way down to the leaves of the tree, and then the minimax values are backed up through the tree as the recursion unwinds
Performs a complete depth-first exploration of the game tree
87
New cards
O(b^m)
The maximum depth of the game tree is m and there are b legal moves
Time complexity of the minimax algorithm
Time complexity of the minimax algorithm
88
New cards
O(bm)
The maximum depth of the game tree is m and there are b legal moves
Space complexity for a minimax algorithm that generates all actions at once
Space complexity for a minimax algorithm that generates all actions at once
89
New cards
O(m)
The maximum depth of the game tree is m and there are b legal moves
Space complexity for a minimax algorithm that generates actions one at a time
Space complexity for a minimax algorithm that generates actions one at a time
90
New cards
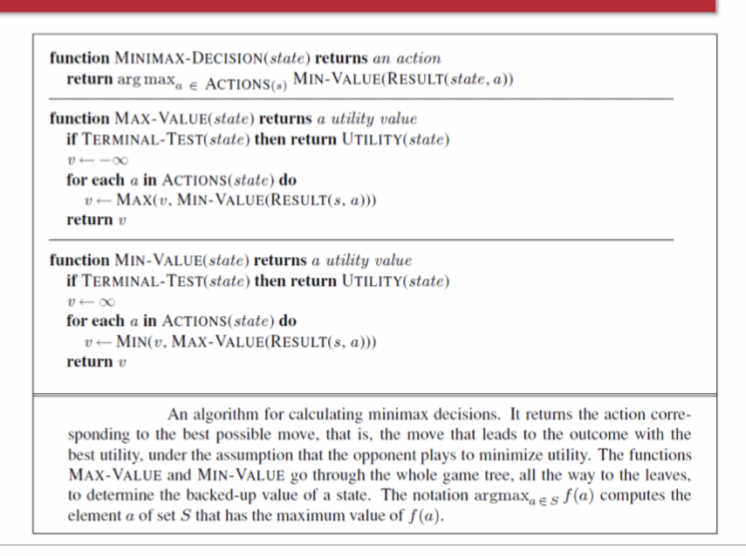
Minimax Search
Algorithm for calculating the optimal move using minimax
The move that leads to a terminal state with maximum utility, under the assumption that the opponent plays to minimize utility
The functions MAX-VALUE and MIN-VALUE go through the whole game tree, all the way to the leaves, to determine the backed-up value of a state and the move to get there
Problem: Number of game states it has to examine is exponential in the depth of the tree
The move that leads to a terminal state with maximum utility, under the assumption that the opponent plays to minimize utility
The functions MAX-VALUE and MIN-VALUE go through the whole game tree, all the way to the leaves, to determine the backed-up value of a state and the move to get there
Problem: Number of game states it has to examine is exponential in the depth of the tree
91
New cards
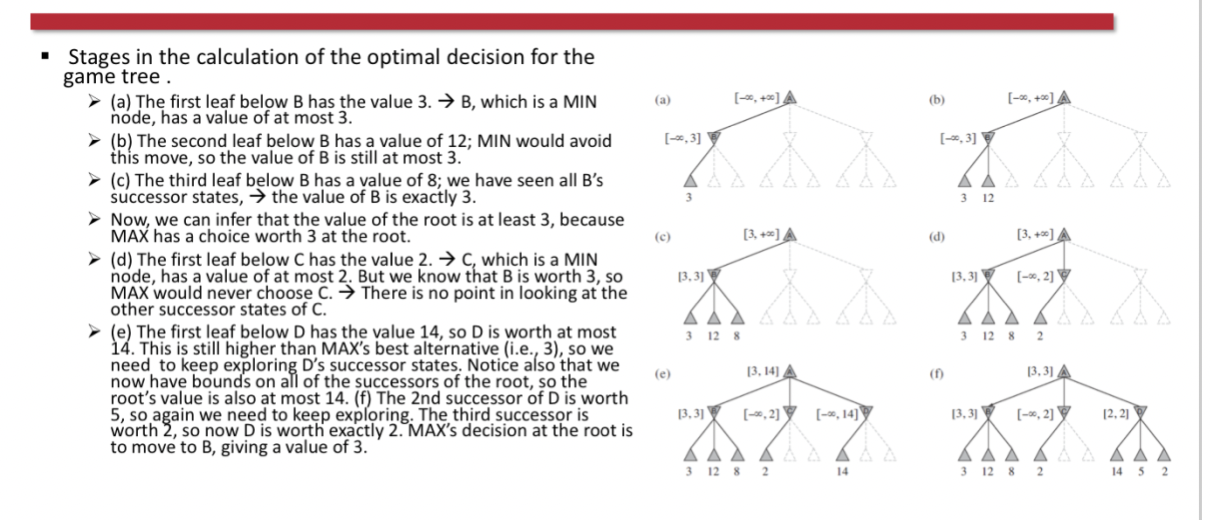
Alpha-beta Pruning
Rationale: Minimax Search has to examine an exponential number of game states, thus want to prune to eliminate large parts of the tree from consideration
Returns the same move as minimax would but prunes away branches that cannot possibly influence the final decision
Can be applied to trees of any depth, often possible to prune entire subtrees rather than just leaves
Effectiveness is highly dependent on the order in which the states are examined
Returns the same move as minimax would but prunes away branches that cannot possibly influence the final decision
Can be applied to trees of any depth, often possible to prune entire subtrees rather than just leaves
Effectiveness is highly dependent on the order in which the states are examined
92
New cards
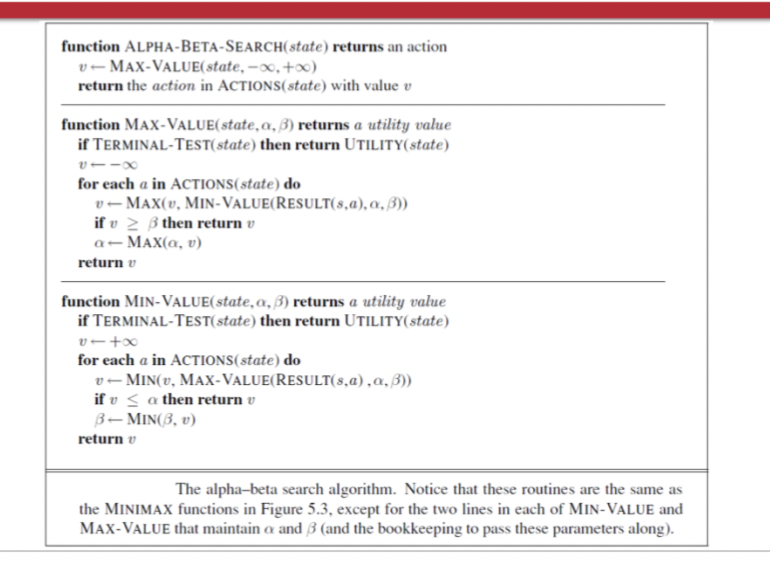
Alpha-beta Search
Same as MINIMAX SEARCH functions, expect that we maintain bounds in the variables 𝛼 and 𝛽, and we use them to cut off search when a value is outside the bounds
General principle:
- Consider a node n somewhere in the tree such that Player has a choice of moving to that node
- If player has a better choice m either at the parent node of n or at any choice point further up, then n will never be reached in actual play
- Once we have found out enough about n (by examining some of its descendants) to reach this conclusion we can prune it
Updates the values of 𝛼 and 𝛽 as it goes along and prunes the remaining branches at a node (i.e. terminates the recursive call) as soon as the value of the current node is known to be worse that the current 𝛼 or 𝛽 value for MAX or MIN, respectively
General principle:
- Consider a node n somewhere in the tree such that Player has a choice of moving to that node
- If player has a better choice m either at the parent node of n or at any choice point further up, then n will never be reached in actual play
- Once we have found out enough about n (by examining some of its descendants) to reach this conclusion we can prune it
Updates the values of 𝛼 and 𝛽 as it goes along and prunes the remaining branches at a node (i.e. terminates the recursive call) as soon as the value of the current node is known to be worse that the current 𝛼 or 𝛽 value for MAX or MIN, respectively
93
New cards
alpha
In alpha-beta search it is the value of the best (i.e highest value) choice we have found so far at any choice point along the path for MAX
94
New cards
beta
In alpha-beta search it is the value of the best (lowest-value) choice we have found so far at any choice point along the path for MIN
95
New cards
Imperfect Real Time Decision
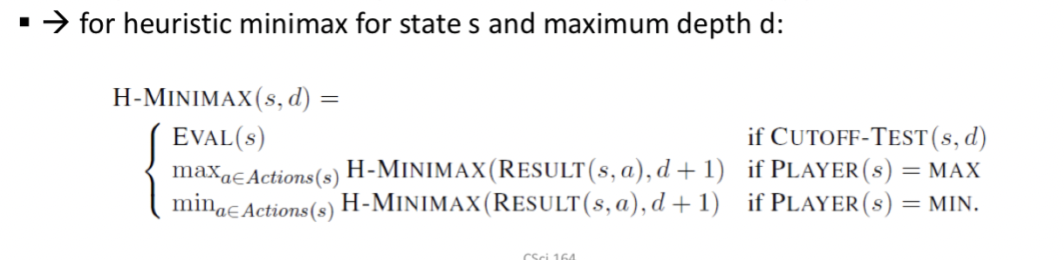
Programs should cut off the search earlier and apply a heuristic evaluation function into states in the search, effectively turning nonterminal nodes into terminal leaves
Suggestion is to alter minimax or alpha-beta pruning in 2 ways:
1) Replace the utility function by a heuristic evaluation function EVAL, which estimates the position's utility
2) Replace the terminal test by a cutoff test that decides when to apply EVAL
Psedocode:
If the search must be cut off at nonterminal states then the algorithm will necessarily be uncertain about the final outcomes of those states
- This type of uncertainty is induced by computation, rather than information, limitations
Determine the value of the current state of the game
Suggestion is to alter minimax or alpha-beta pruning in 2 ways:
1) Replace the utility function by a heuristic evaluation function EVAL, which estimates the position's utility
2) Replace the terminal test by a cutoff test that decides when to apply EVAL
Psedocode:
If the search must be cut off at nonterminal states then the algorithm will necessarily be uncertain about the final outcomes of those states
- This type of uncertainty is induced by computation, rather than information, limitations
Determine the value of the current state of the game
96
New cards
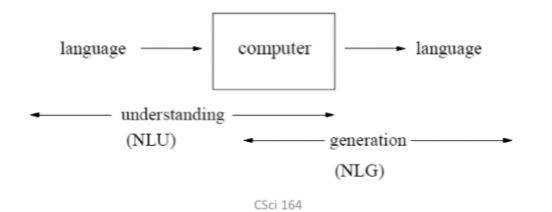
Natural Language Processing (NLP)
Field in AI for creating computers that use natural language as input and/or output
Kind of translator between humans and machines
To interact with computing devices using human (natural language)
To access (large amount of) information and knowledge stored in the form of human languages quickly
Ex: Enables auto suggestion, chatbots
Kind of translator between humans and machines
To interact with computing devices using human (natural language)
To access (large amount of) information and knowledge stored in the form of human languages quickly
Ex: Enables auto suggestion, chatbots
97
New cards
Text Analytics
Involves the extraction of limited kinds of semantic and pragmatic information from texts
98
New cards
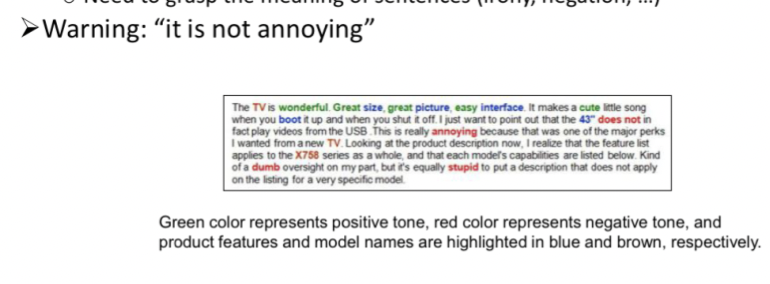
Sentiment Analysis
Deals with categorization (or classification) of opinions expressed in textual documents
99
New cards
NLP Tasks
NLP applications require several NLP analyses
- Work tokenization
- Sentence boundary detection
- Part-of-speech (POS) tagging
- Named Entity (NE) recognition
- Parsing
- Semantic Analysis
- Work tokenization
- Sentence boundary detection
- Part-of-speech (POS) tagging
- Named Entity (NE) recognition
- Parsing
- Semantic Analysis
100
New cards
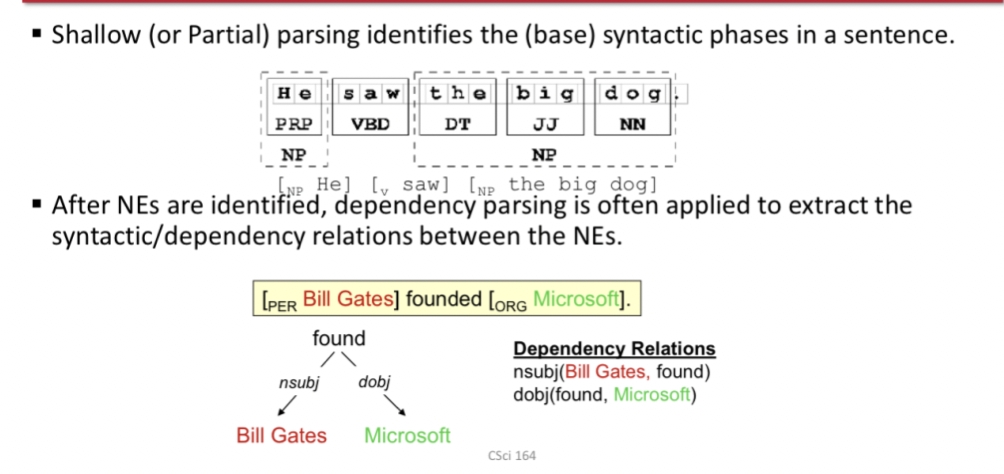
Shallow Parsing
Identifies the (base) syntactic phrases in a sentence
After NEs identified, dependency parsing is often applied to extract the syntactic/dependency relations between the NEs
After NEs identified, dependency parsing is often applied to extract the syntactic/dependency relations between the NEs