Collaborative Robots and Safety
1/12
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
13 Terms
Collaborative Robots
A robot that can be used in a collaborative operation
Defined by the operation that they are doing not by the type of robot itself
Collaborative Operation
A state in which a robot works in direct cooperation with a human within a defined collaborative workspace
Collaborative Workspace
A workspace within the safeguarded space where the robot and human can perform tasks simultaneously during production operation
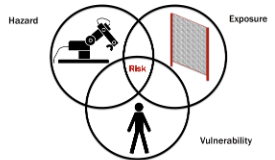
The Robot Risk Model
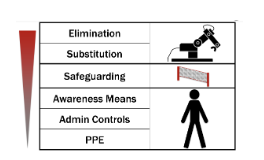
Robot Risk Reduction
ISO 10218 Part 1
Outlines the six steps to be considered as part of a risk assessment
The intended operations of the robot, including teaching, maintenance, setting and cleaning
Unexpected startup
Access by personal from all directions
Reasonably foreseeable misuse of the robot
The effect of failure in the control system
Where necessary, the hazards associated with the specific robot application
ISO 10218 Part 2
Requires a risk assessment for collaborative applications to evaluate task/hazard combinations and set appropriate limits
Means of anticipating tasks and hazards with the goal of applying suitable risk reduction measures
Uses iterative process to determine the desired effect is achieved
Avoids “one size fits all”
ISO TS 15066
Technical Specification about collaborative operations, which may include one or more of the following methods:
Safety rated monitored stop
Hand guiding
Speed and separation monitoring
Power and force limiting
Safety Rated Monitored Stop
What the collaborative robot does in the presence of an operator or obstruction
Stop motion condition ensured
Drive power remains on
Motion resumes after obstruction clears
Robot motion resumes without additional action
Protective stop delivered if stop condition is violated
Hand Guiding
Where an operator leads robot movement through direct interface
Robot stops when operateor arrives
Operator grasps enabling device, activating motion
Robot motion responds to operator commands
Non-collaborative operation resumes when operator leaves collaborative workspace
Speed and Separation Monitoring
Where the robot speed reduces when an obstruction is detected
Separation distances are monitored
Robot speed directly correlates to sparation distance
Stop given if direct contact proximity is attained
Power and Force Limiting
Where incidental contact initiated by robot are limited in energy to not cause the operator harm
Forces robot can exert are limited
Robot system design eliminates pinch points, sharp edges, to prevent the robot trapping operators
Robot complies and reacts when contact is made
Reduce robot velocity or inertia
Modify robot posture, to increase possible exposure surface area (reduce pressure)
Avoid sensitive body areas
ISO TS 15066 Onset of Pain Study
Guidance for power and force limits based on study examining these conditions and the onset of pain in 29 body regions.