L1: Intro to the Motor system
1/46
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
47 Terms
Learning objectives
To understand the organisation of motor pathways
To understand the problems of controlling movements
To introduce neuronal networks and their function
To show how motor defects reflect deficits in motor system components
Motor vs sensory systems
Motor:
balance, posture, move body, limbs, eyes and allow communication
allos body to move through and manipulate the environment
Transform nerual info into physical energy
Senosory:
tranform physical energy into neural info (i.e the opposite)
Why important to understand motor systems
artificial systems
treatments for neurological conditions that affect movement
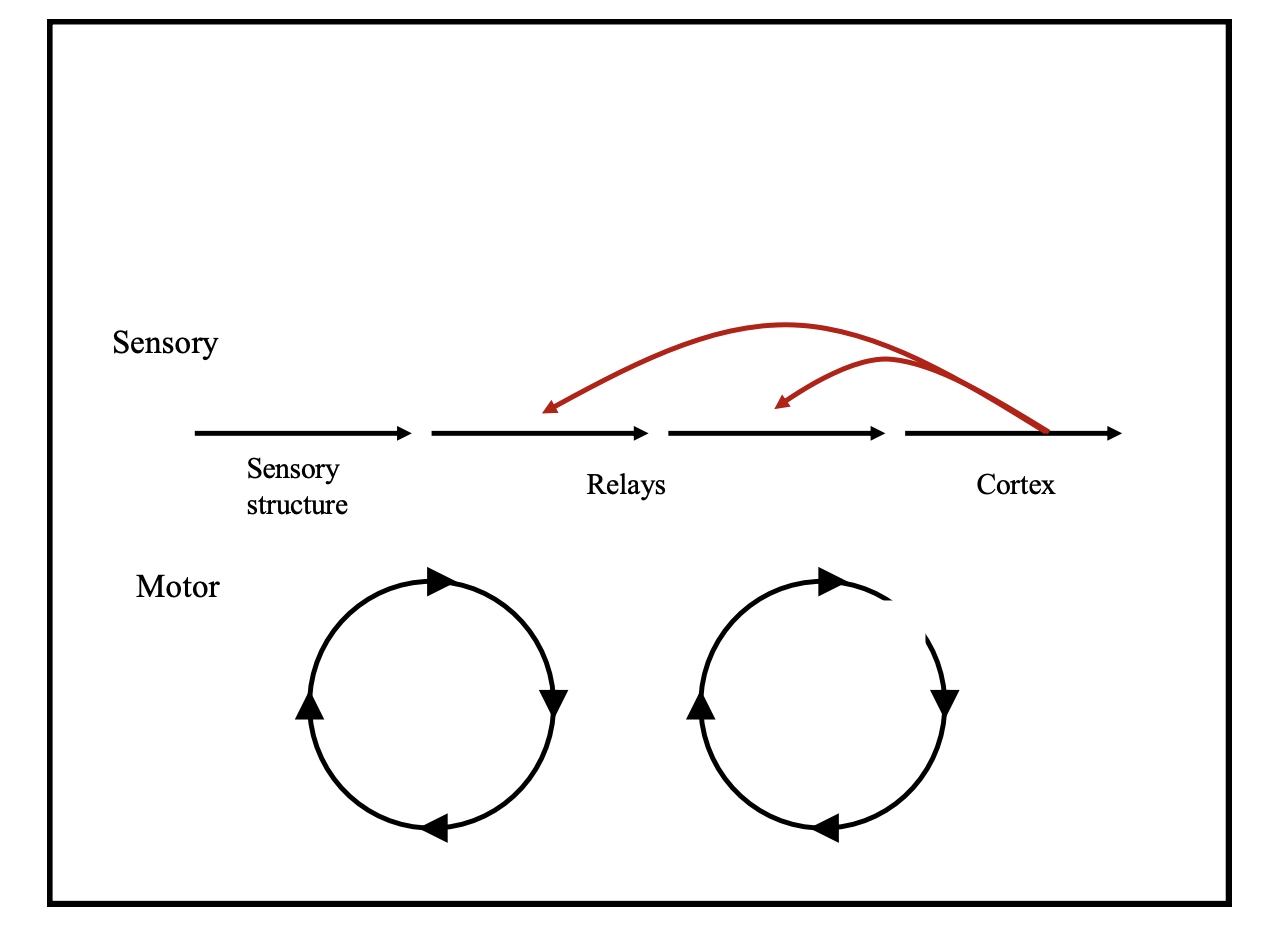
Sensory vs motor (why is motor more difficult to study)
sensory→ linear chain
several relays (with feedback)
motor→ loops
hierachy that generates outputs than in turn generate inputs
‘Re-afference’
To study→ must break the loop and analyse parts individually
(at the same time as recognising how they act co-operatively)
Why is it really important to study the motor system (the most important?)
Understanding motor system is relevant to understanding behaviour
note: its it not that it is dominant of most important
instead: all conscious and unconscious beahviour involve the motor system
e.g animal with memorty of where it stored food can only use this memory if it can move to get the food→ otherwise no point)
e.g Movement disorder are cardinal signs of CNS damage
understanding it helps to identify the location and possible cause of CNS pathology
Charles Sherrington and Edgar Adrian quotes about the importance of the motor system
Charles→ “To move is all mankind can do-whether in whispering a syllable or in felling a forest.”
Edgar→ “The chief function of the central nervous system is to send messages to the muscles which will make the body move effectively as a whole”
not that motor system is the most important but that it is involved in every behaviour
Roles of the motor systems
Move in or to manipulate the world
To maintain equilibirium
Autonomic functions- respiration, gut movements
Communication→ speech/gesture/written
Sensation→ vision *saccades), Somatosensory (haptics, active touch)
have specific sequence of eye movement to recognise face (look at eyes then mouth etc)
Touch→ move object around to fully feel it
used to improve gripping in robots
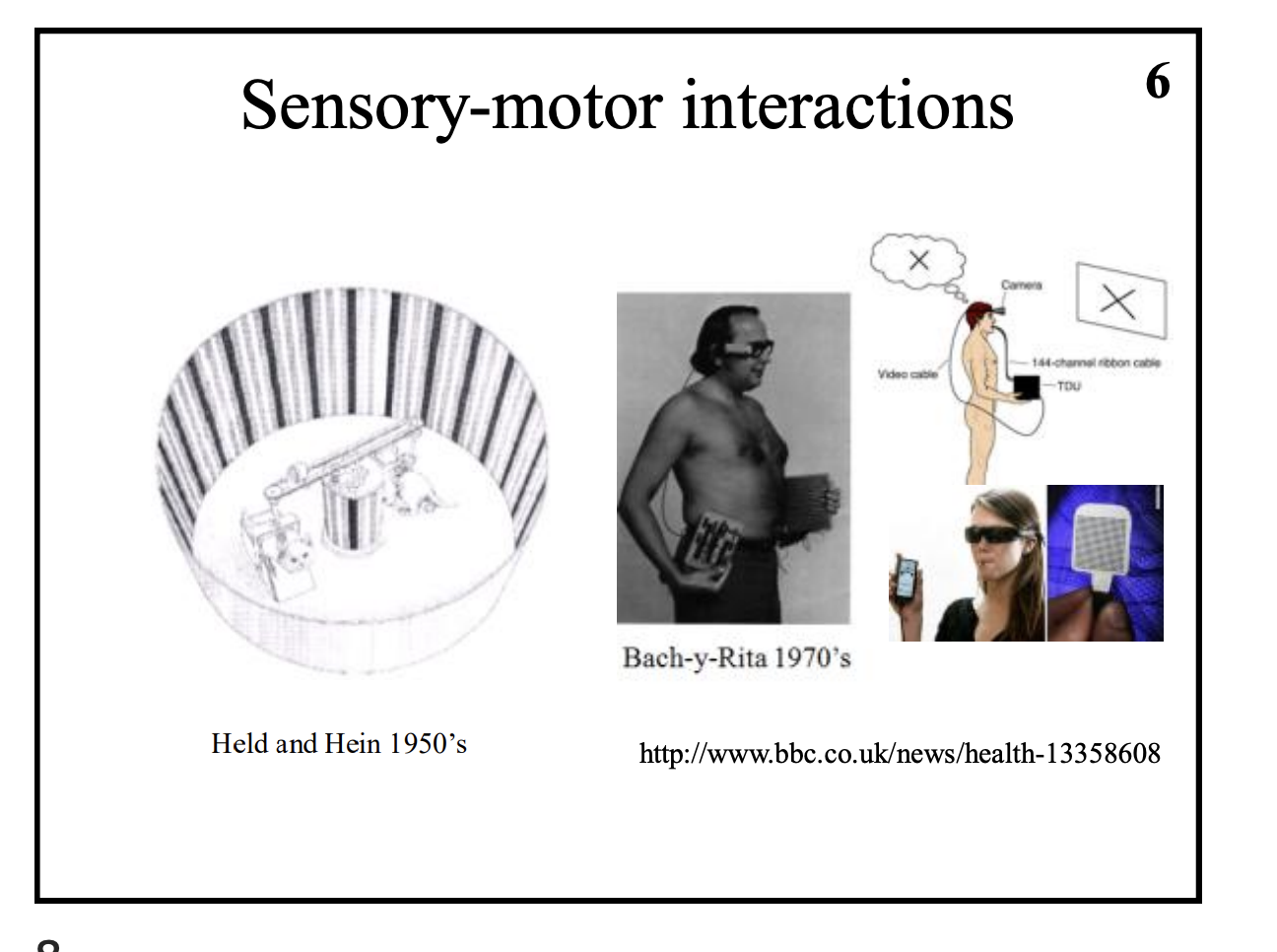
Sensory-motor interactions→ How do motor systems rely on sensory (and evidence)
Proprioreception→ motor requires sensory feedback of body and limb position to generate appropriate ouputs
Evidence: Tabes dorsalis (large fibre sensory neuropathy)→ propriorecption deficets
Axons that carry proprioreceptive and tactile inputs degenerate
RESULT: cannot sense their position or movement
cannot plant and control motor system
(unless can see thier limbs)
But sensory also relies on motor (therefore shows how they are intimately related)→ cat experiment
Held and Hein
Procedure:
kittens moved either actively or passivele through environment
Result:
Passive kitten→ developed visual deficits
Shows how need motor to develop visual/ visual is needed for motor to work→ is motor is passive→ no longer need visual
Using this experiment→ developed sensory subsitiution for the blind
How it works
Use a camera and convert the visual field into tactile inputs whic can be sensed by the blind
felt on skin or tongue
Result:
Could only sense the environemnt if the camera was placed on the head (instead of just to the side)
This is because the wearer could actively move the camera
NOT PASSIVE
What does this active movement of the camera tell us about perception
Perception needs movement
and
The motor system needs sensory input
The motor system is not a passive system→ it is actively invovled in sensory perception
we only separate the two systems for experiments
Three basic types of movements
note: movement = variable combinaton of these three types
Reflex→ knee jerk, cough
simplest
limited muscle groups
little voluntary control
Rapid
stereotypes
graded function of eliciting stimulus
Rhythmic→ walking, running chewing
several muscle groups
coordinate limbs, joints or whole body
Relatively sterotyped
Some modification
Voluntary→ playing piano, manipulating objects, speech
most complex
Purposeful
Whole body muslce groups
initiated by stimuli or internal motivational systems
Goal directed
Modifiable: learnt and improve with practice
Why do we think motor control is trivial compared to perception/cognition?
Unconscious control→ limited focus needed
Invariant development→ everyone develops the same levesl of motor functions (except in disease)
irrespective of background (which markedly affects cognitive function)
(although can be improved by training)
Highly reliable→ only go wrong is the environment changes (wet surface)
compared to cognitive→ forget and make bad decisions
Why is motor control atually not trivial/ is difficult to perform
Significant computations
rapid regulation of billions of neurons and synapses
to control mutliple muscle groups and limbs
Highly flexible
HIghly reliable
Motor systems have overcome two paradoxes
Speed vs reliability
can change motor output quickly BUT still be reliable (e.g switch to sprint→ will still be able to know how to switch even with speed)
Reliability vs flexibility
artificial systems cannot overcome this
How is such difficult control made look so easy?
Basic movement is not effortless and unconscious because it is trivial but reflect the sophisticated motor systems that have evolved
Better than the most sophisticated robotic systems
What does Moravec’s paradox highlight
The ascept humans find easy (motor system) are difficult to mimic in artificial systems
Whilst
the aspects we find hard (memory) are easier in artificial
Deep blue chess master
Motor control is difficult to study why
Movement is end point of series of commands
Same command different result
Different command same result
Motor equivalence problem
Neuronal networks are complex
Movement is end point of series of commands
need to trace back to CNS to understand how it was generated
BUT→ pathway is dynamic and non-linear
so difficult to infer features of upstream command
Same command different result
muscular contraction depends on previous activity
‘thixotropy’
e.g if tired, drunk, cold→ get different output for same input
Different command same result
same output but from different command
Motor equivalence problem
every movement could in principle be unique
because joints have many degrees of freedom
directions and angles of limb movement
Neuronal networks
assemblies of neurons generating specific outputs/functions
individual spinal motor neurons integrate 1000s of inhibitory and excitatory synaptic inputs
e.g retina
Understanding these actually reflect difficultis of understing any nervous system function (not just motor!)
What is needed to know to understand neuronal networks
Identify network neurons
Determine their connectivity
Characterise their cellular and synaptic properties
Why is identifying synapses and their functional properties really difficult
large numbers of compoents
Inverse relationship between neuron size and number
more neurons = smaller the size
Not just large numbers→ other difficulties
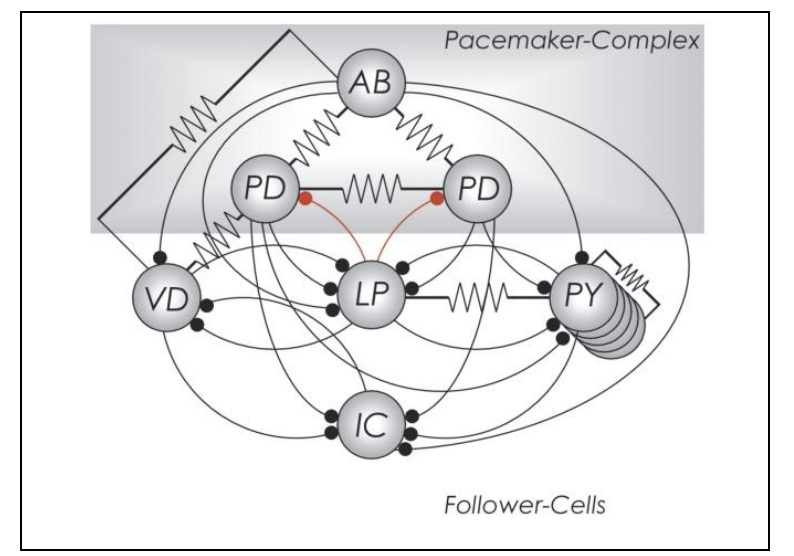
e.g seen in example of pyloric network in lobster: STG)
we KNOW all the individual neurons and their connections
yet we still do not understand how it works!
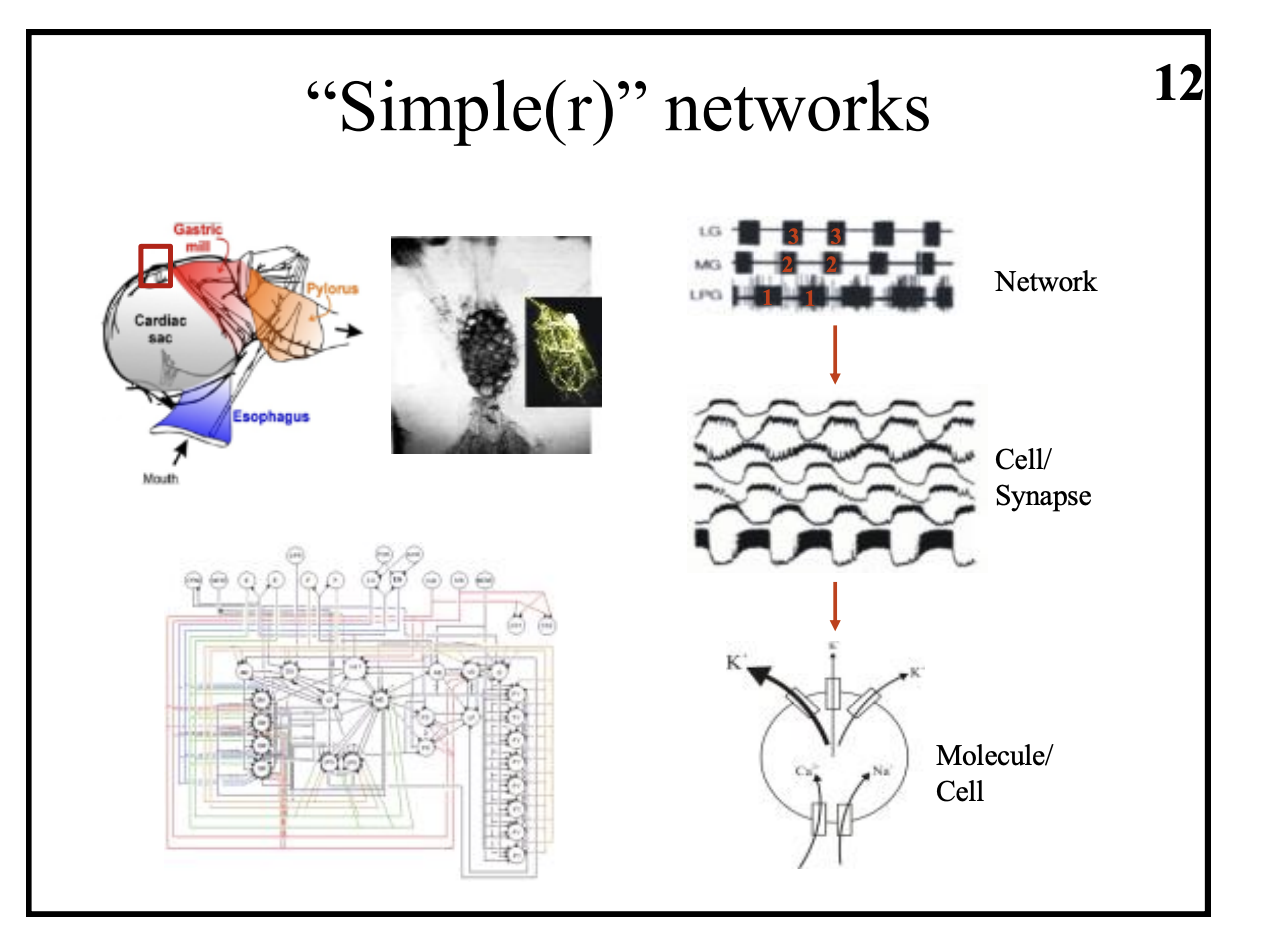
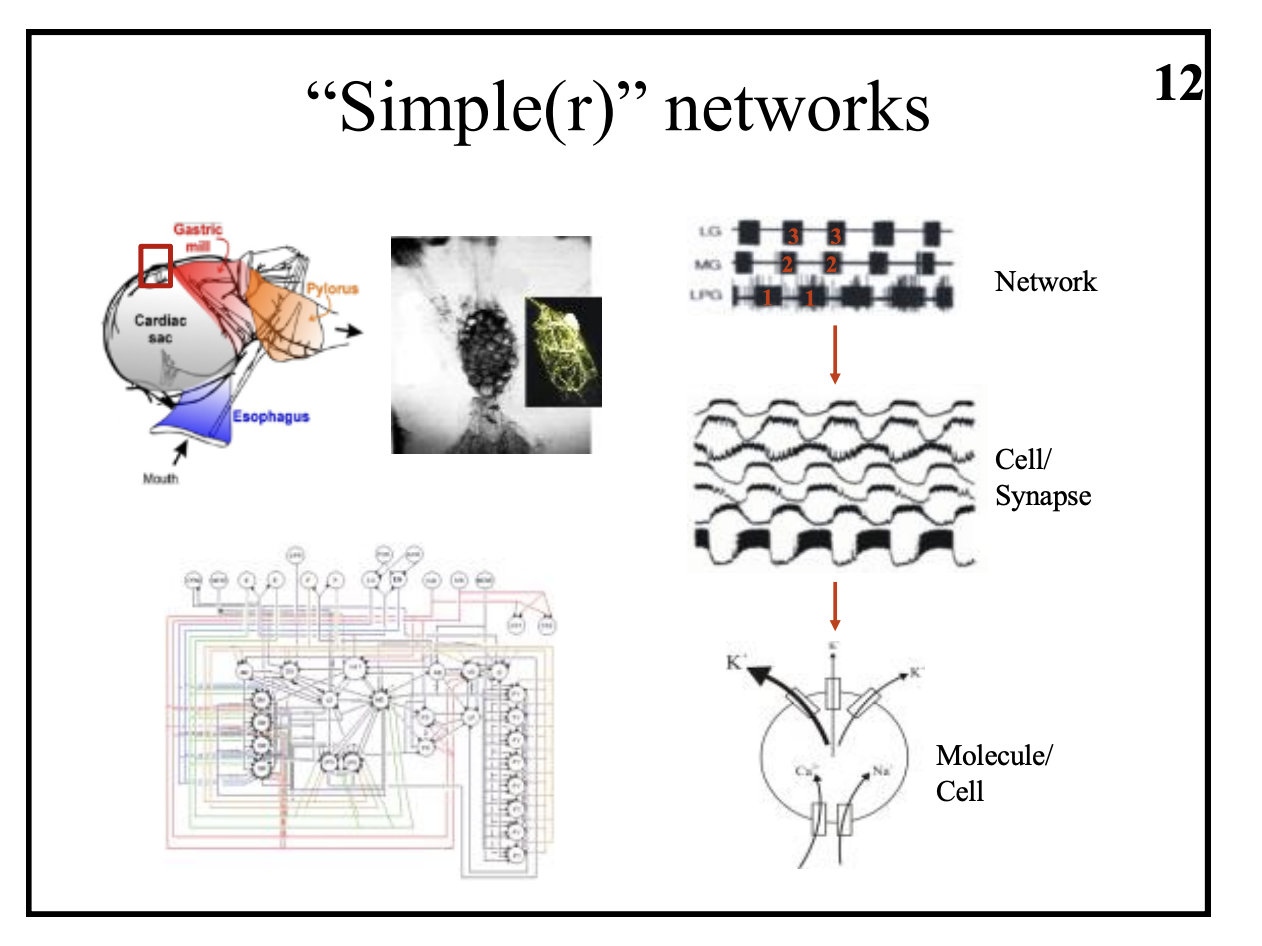
Example further→ STG network in lobster
controls movements of stomach
simplest and best characterised network
→ We know ALL the three criteria listed above
<30 large neurons
relatively limited number of synaptic connections
All properties characterised
HOWEVER: it is still not clear how the STG generates its output
What does this example show
SHOWS: difficulty of understanding how individual network compoentns interact
Furhter:
if such as simple network is hard to understand→ it is very hard in mammalian → billions of cells/synapses
even insect locomotion is order of magnitude more components than STG
understandingneuronal networks is the biggest problem in neuronscience/science
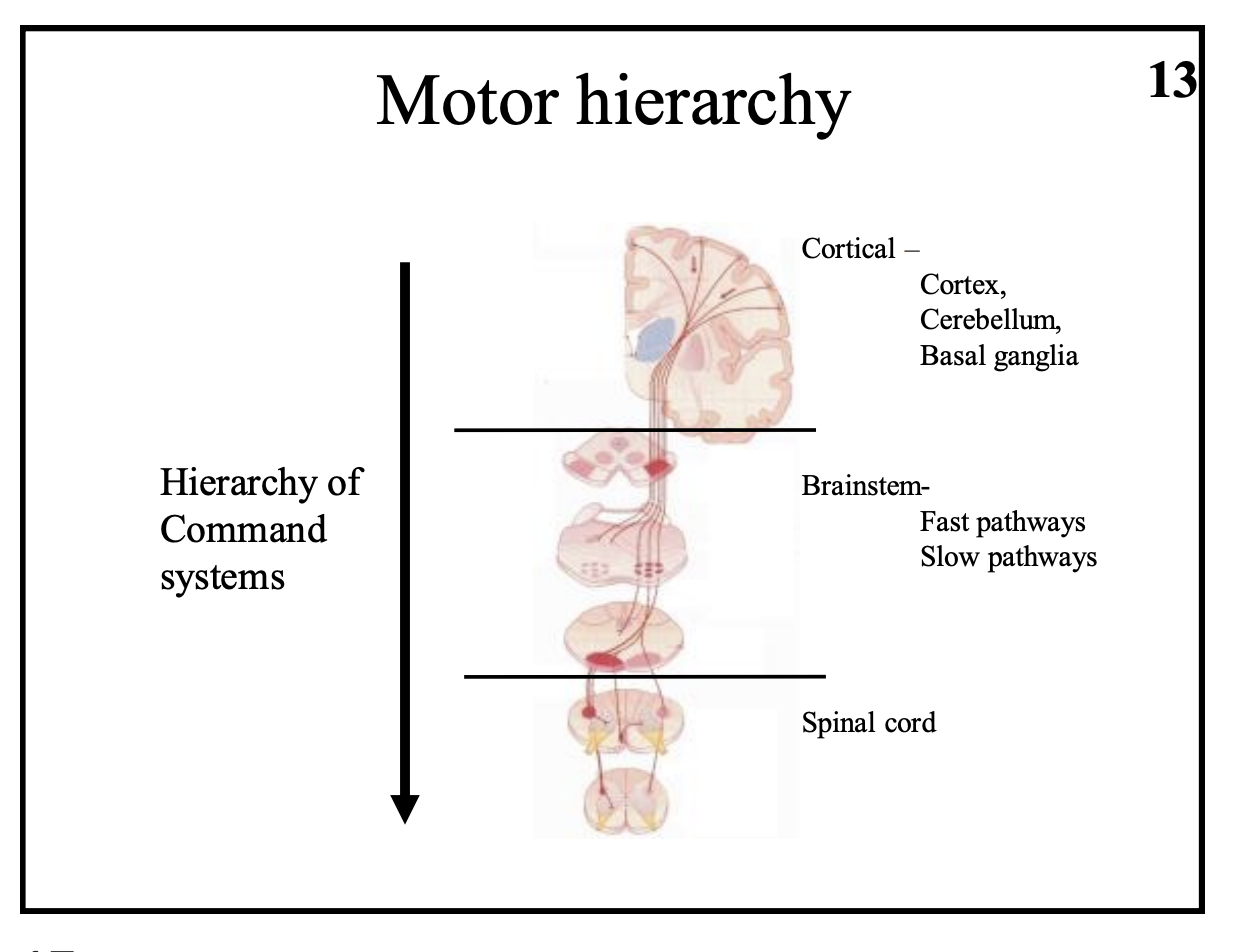
Organisation of motor systems: the motor system as a hierarchy
Highper components specifify effects at lower levels
But: does not mean that the lower levels are less important
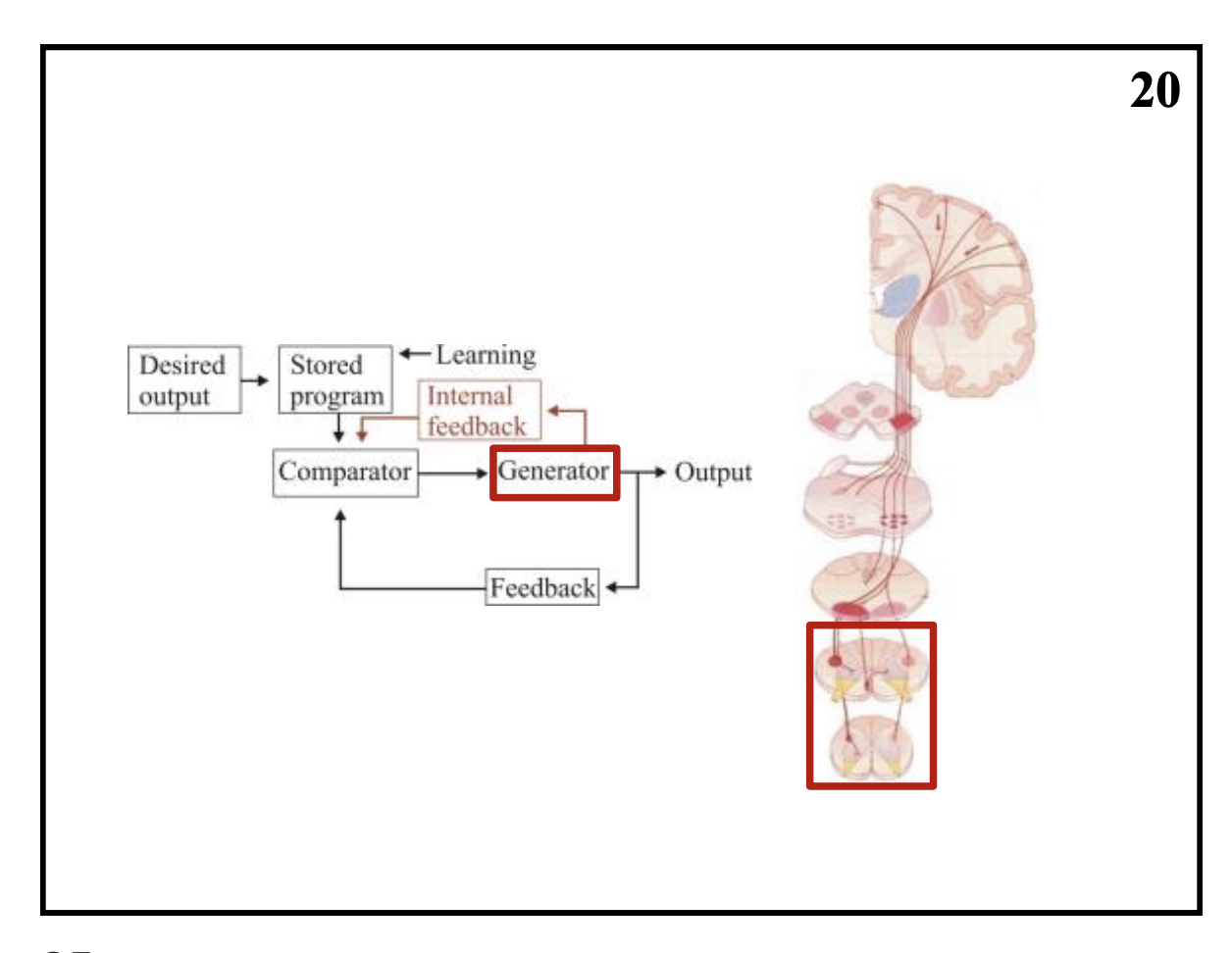
Three general levels in the vertebrate motor system
Spinal cord
Brain stem
‘higher’ centres (motor cortex, cerebellum, basal ganglia)
Motor system in invertebrates (insects)
Consists of segmented ventral nerve cord
runs the legnth of the animal
What does the nerve cord consist of
Chain of ganglia
(sometimes fused together)
Ganglia contain→ a few dozen 100s thousands of neurons
Ganglia in each segment→ joined to their neighbours by interganglionic connectives
Invertebrate vs vertebrate
Anatomical differences
but
Similarites→ in terms of functions
the different regions have same specific roles:
comparator, generator, output, feedback, stored program etc
therefore: invertbrates are useful to study to understand vertabreate motor control
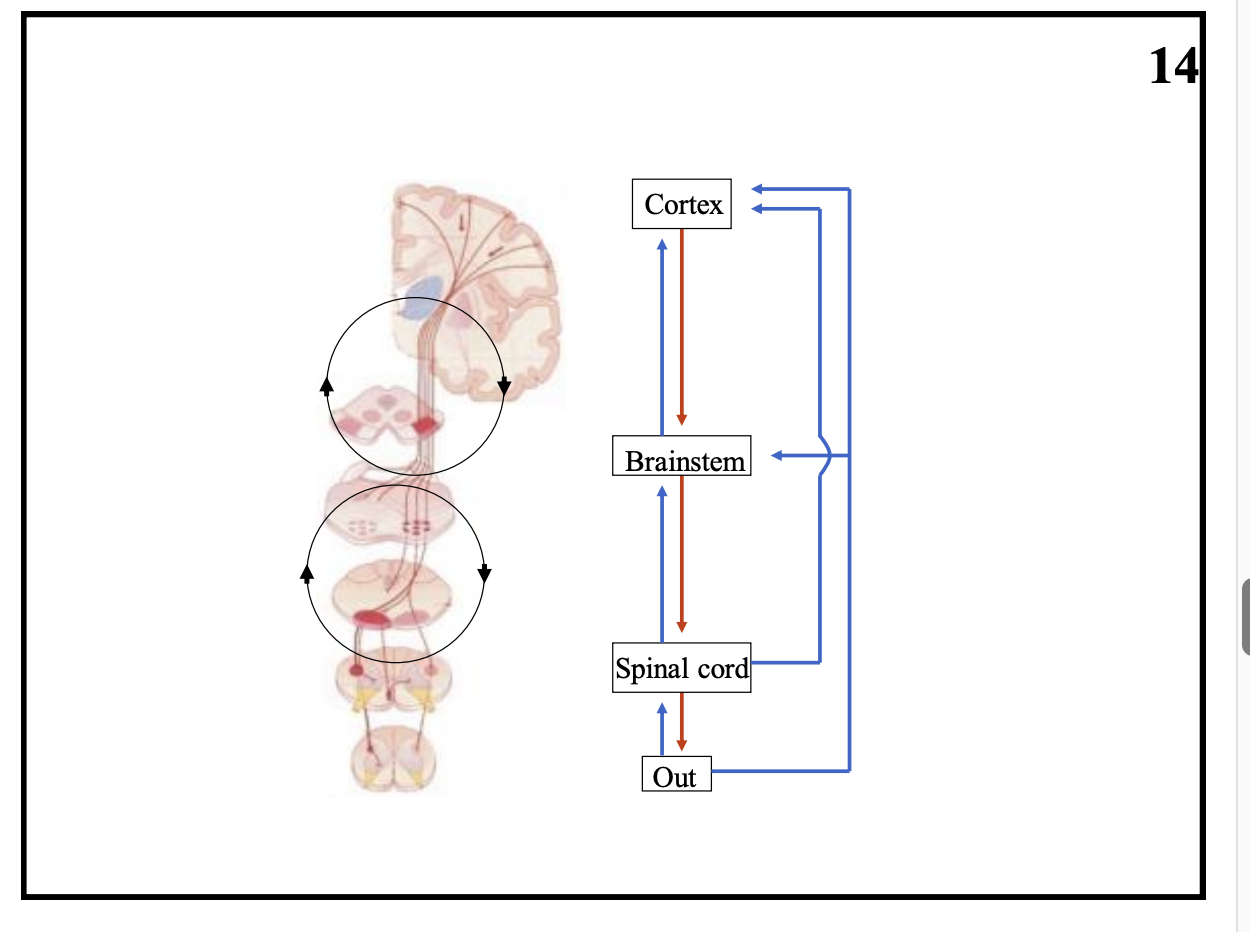
However→ Is there really an Anatomical hierachy??
Not really→ not just descening from high to low
Motor system is a series of loops
there is feedback from every level
what other kind of hierachy could describe it?
Functional (again each stage is not more important than the other)
Idea→ what is the goal
plan→ how do i achieve it
Program→ what muscles and how much
Execution→ send out motor commands
Movement
As go down these→ from cortical areas to the spine etc→ have idea→ movement
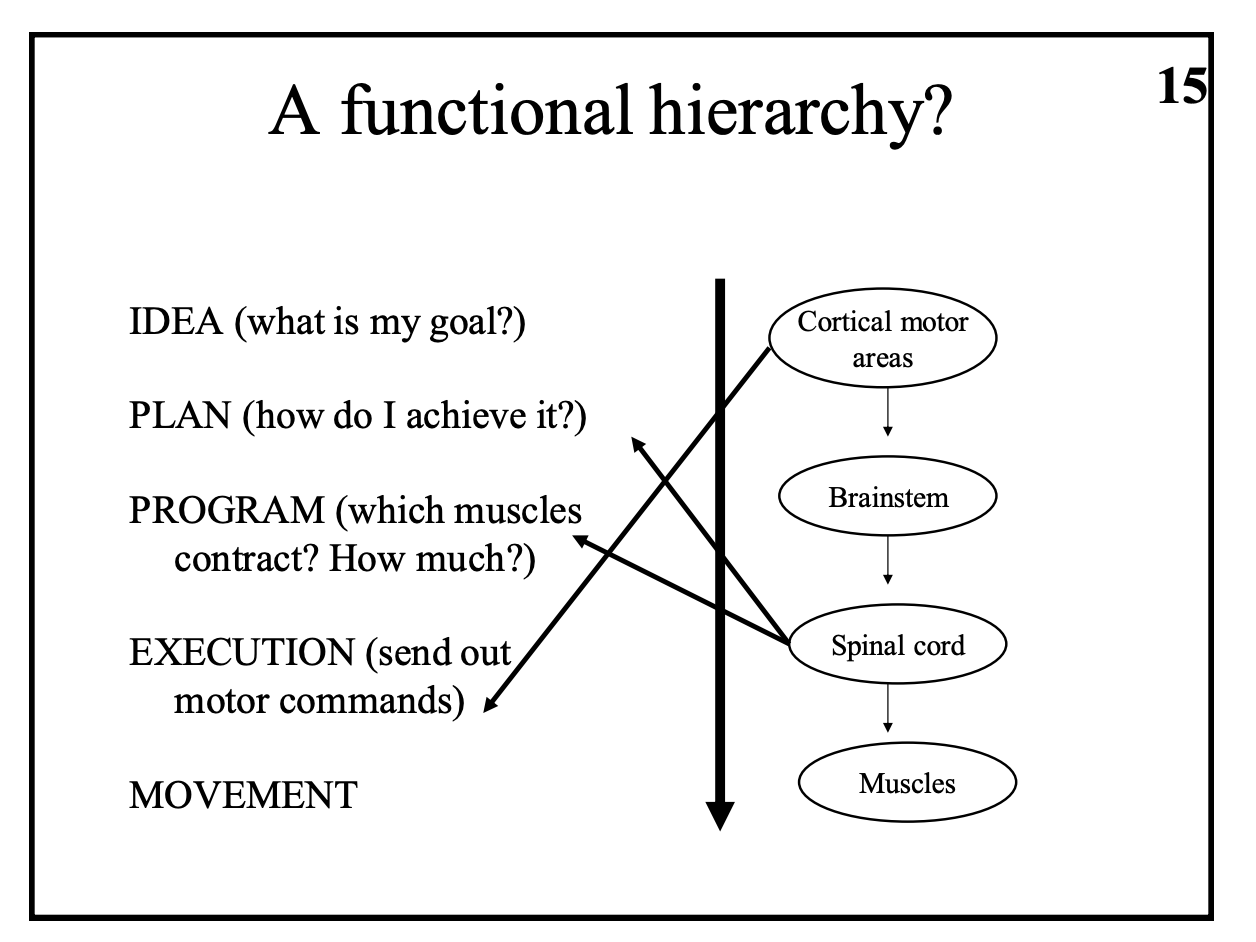
Issue with functional hierachy
e.g the spine can also the thing to PLAN and PROGRAM (as well as execute)
e.g the motor cortex can execute (not just plan)
i.e the funtional roles are not always in the same order as the anatomical hierachy
Therefore the organisation can be consiered as
Heterarchy
Multiple feedforward and feedback pathways
no fixed upper or lower level
upper is context dependent
e.g step on a pin→ command = spinal cord which then sends signals to cortex to modify the next movements
e.g conventrional_ >from cortex→ to spine
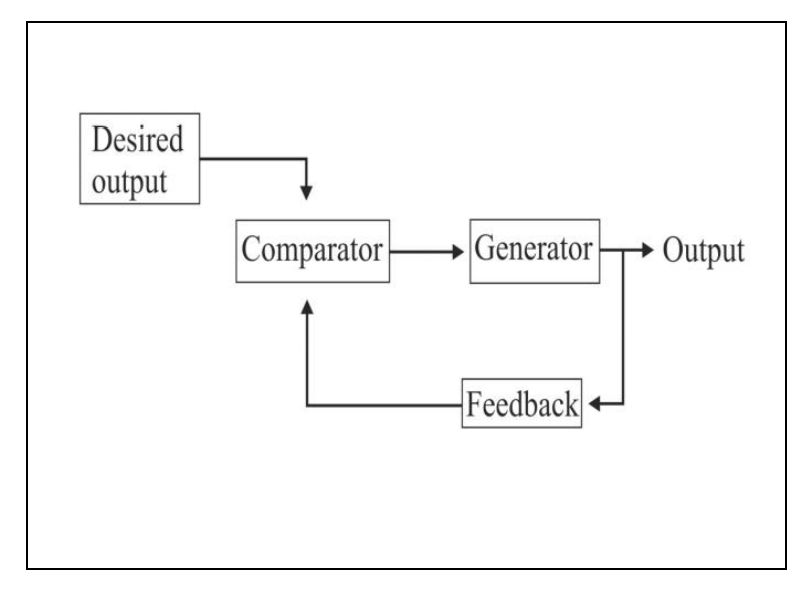
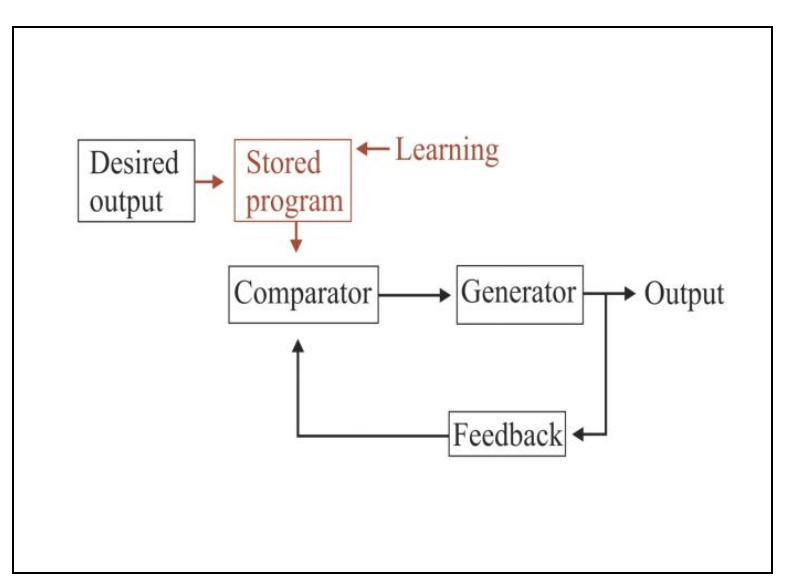
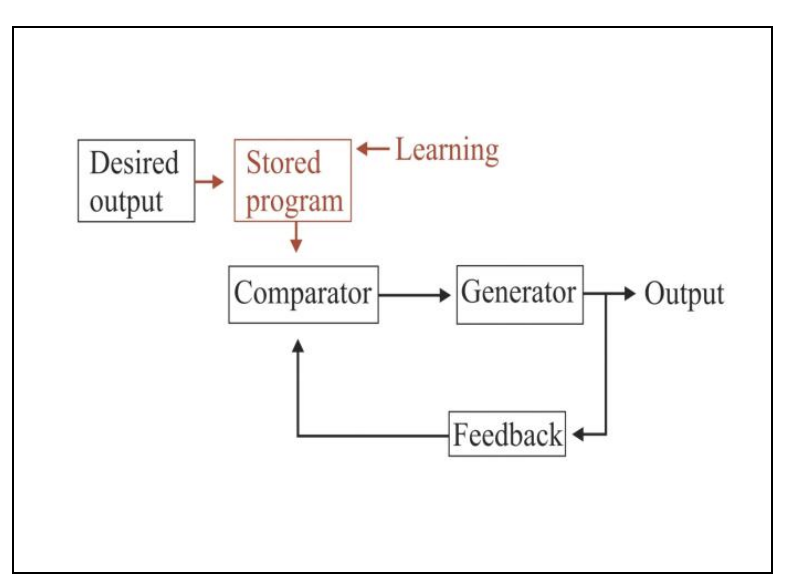
Interactions between components
Output/negative feedback mechanisms
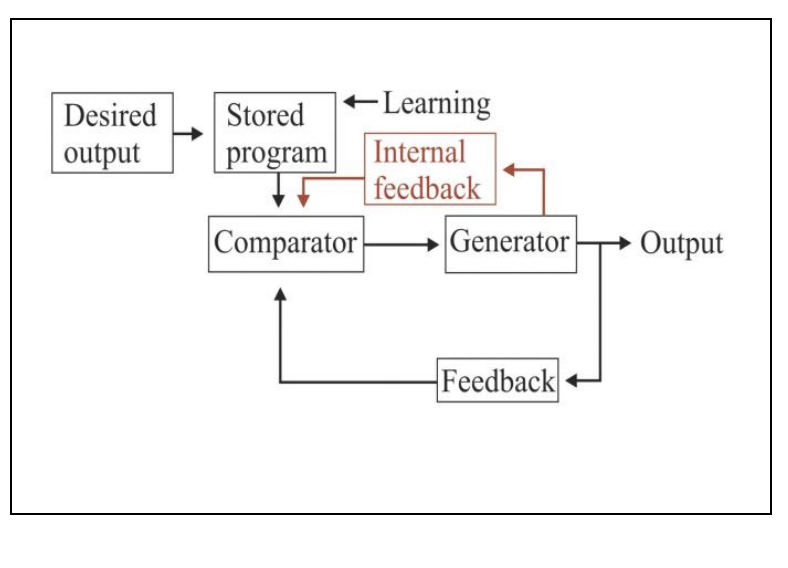
Internal feedback-efferent copy
Anticipated Motor commands
Output/negative feedback mechanisms
feedback signal is subtracted from the reference (desired output) by a comparator
feedback error signal increases or decreases the ouput of generator
reduces the error
See everywhere in bio and artifical
also be positive
Issue with negative feedback
Delays
by the time the correction starts, the error has increased further
causes oscillations due to changes above and below desired set point
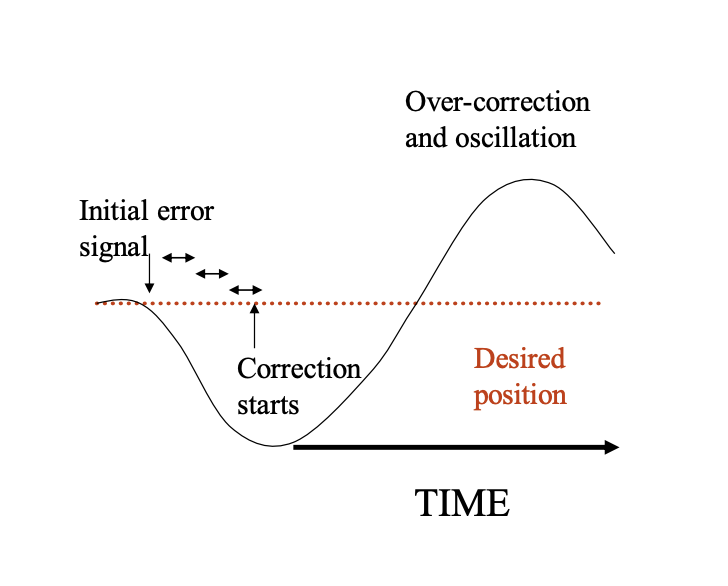
example of this problem
Catching a ball
take 700ms to respond to visual clue
but
movement takes 150-200ms
When is it used
sensory inputs can only be used to set up the initial conditions
e.g position of the arm and hand to catch the ball
based on predictions of the balls trajectory
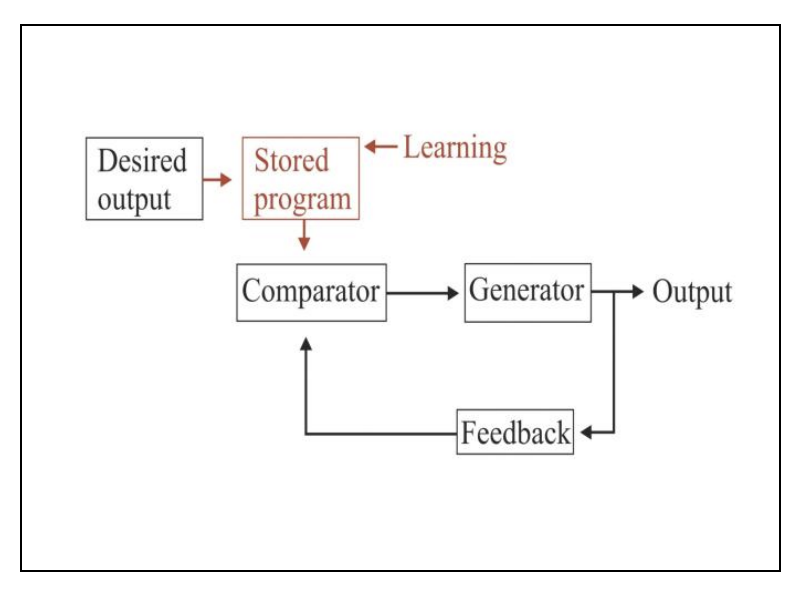
Feedforward control
movements are programmed in advance
How:
predict when to use already stored (learn) motor programs
Exmaple 1 of this
you prepare to walk differntly on icy slope
from previous experinece
so you adapt motor output before you even go on the ice
Example 2 of this
hitting a ball
Visual inputs will already set up limb positions and muscle tone for the predicted position and speed of the ball
Requires→
acquired internal models of ball trajectory
muscular skeletal properties from previous experience of where ball will land/ounce
Efferent copy
Form of internal feedback
Motor output is send to other areas of motor system to inform it of the intended movement before or as it is being made
→minimising delays with external feedback
Actual movement can be compared to the planned and any erros corrected
All these mechanism together
not isolated
combine in different circumstances
to optimally generate coordinated motor outputs
Key points
Motor systems fulfil diverse roles beyond just movement.
Motor systems consist of several structures that influence outputs through parallel distributed pathways.
Motor and sensory systems are closely related, and highly dependent on each other.
Because of delays, feedback control is limited to slow movements.
Fast responses use feedforward prediction.