Animals in Motion
1/134
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
135 Terms
Bipedalism
Walking on two legs, characteristic of humans, birds and therapod dinosaurs.
Walking
One foot leaves ground at a time in bipeds, and a period of double-support in quadrupeds.
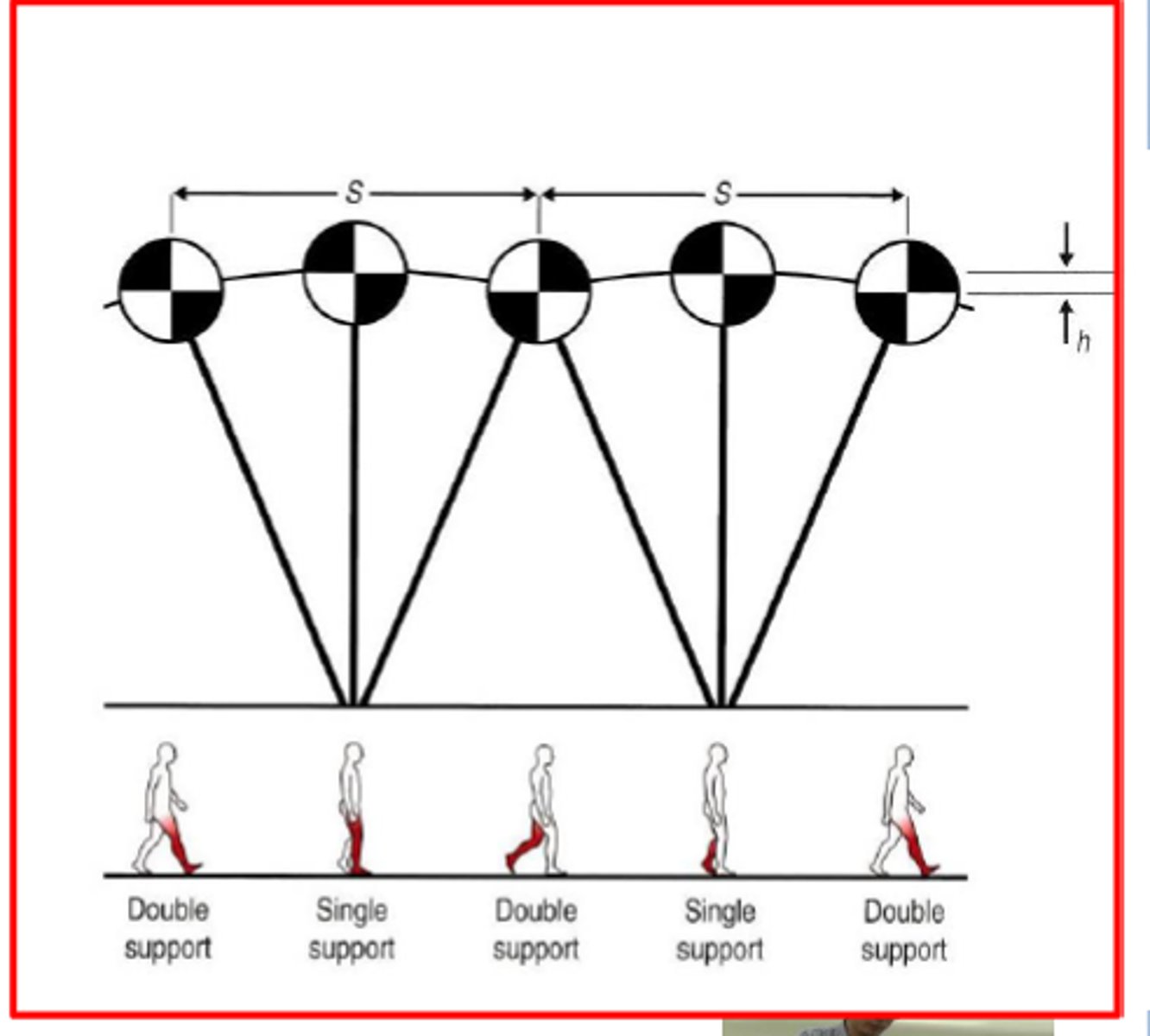
Inverted pendulum model
Mathematical model mimicking simple walking motion.
· Mass is converted into a single point of mass.
· Gravity pulls the point mass towards the ground.
· Legs are rigid and have no mass - a simple connector with the ground.
· If the mass is initially vertical, a push is needed to start the movement by gravity.
·The vector of movement can be separated into vertical and horizontal movement.
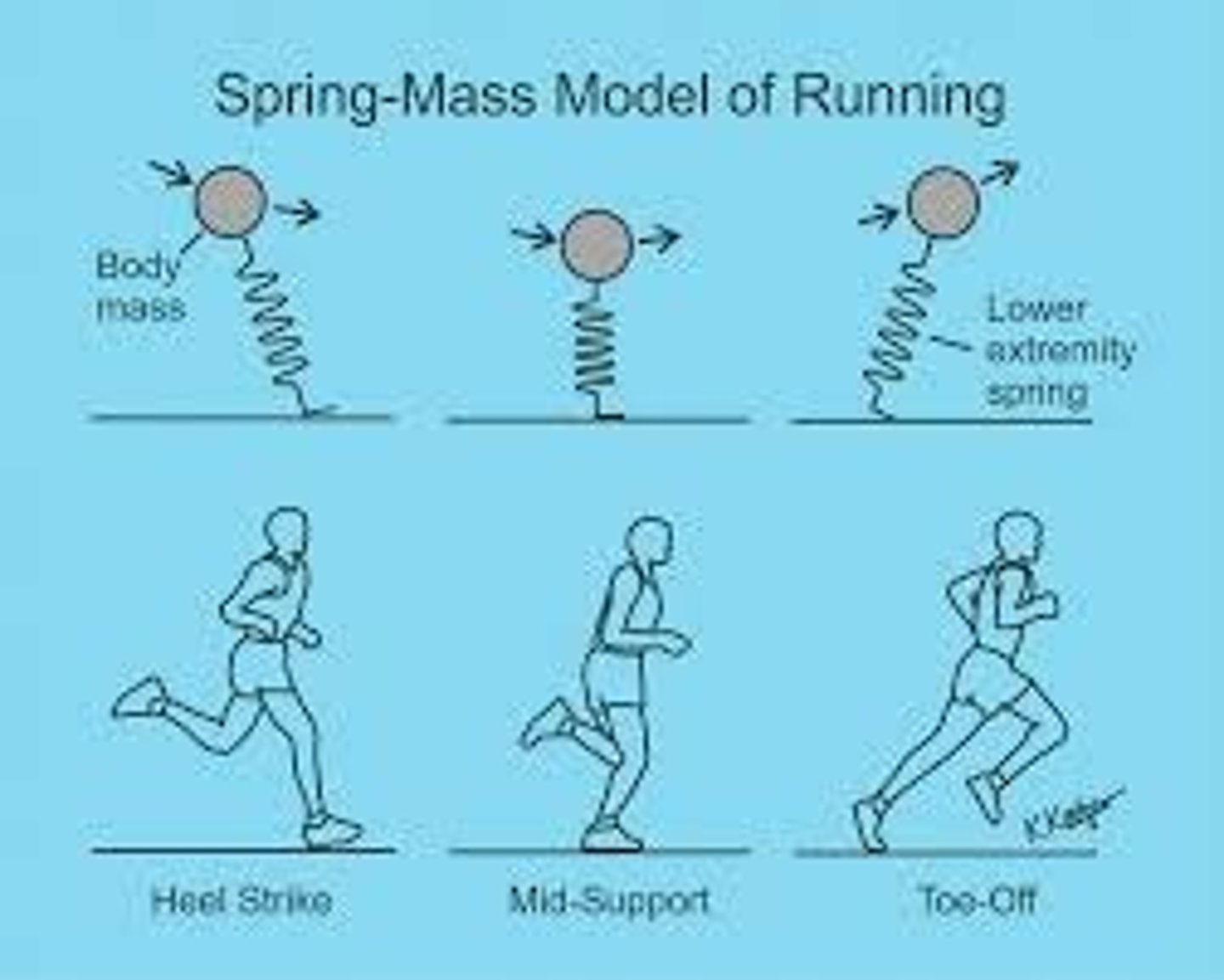
Spring-Mass Running Model
Legs act as springs to store and release energy.
· Highest point is when the mass is in the air, and the lowest is when the joint is bent on the ground to prepare for the continuation of movement.
· The centre of mass is slightly forward of the middle to help propel the mass forward.
Legs with Mass Model
Legs considered as pendula affecting movement dynamics.
· During the swing, the mass will prevent the foot from moving due to the stiffness.
· Stiffness is overcome by jointed legs - the knee allows a decrease in the distance between the foot and the hip.
· Patella is a natural break to prevent hyperextension of the knee.
· Knees are susceptible to collapse and bending, but it allows a passive reaction to negotiate uneven terrain.
Ground Reaction Force (GRF)
Passive force equal to and resisting downward weight through the ground directly through the foot to the CoM. Means if CoM is not directly over the foot, the animal is unstable when stationary.
There are three types.
Vertical Ground Reaction Force (VGFR)
Max force when weight is fully on one foot.
Force decreases when other food hits ground.
Zero force when foot is in swing phase.
Horizontal Ground Reaction Force (HGRF)
Force resisting forward and backward motion on contact of foot.
Decelerates the momentum forward on initial foot contact with the ground.
Pushes body forward when the weight is transferred to the other foot.
Zero force, when weight is vertically over foot.
Mediolateral Ground Reaction Force (MGRF)
Force pushing inward to stabilize lateral movement of foot when CoM is offset by forward step.
Force is reduced when the steps are directly under the animal.
It is the smallest GRF and is mostly negligible.
Benefits of different postures
Prevents GFR from aligning with CoM by creating a moment around uncoordinated joints.
It forces muscles to maintain posture and prevents joints from locking and collapsing.
Crouched posture
Posture of bent knees and sometimes ankles, enhancing maneuverability in smaller animals.
Columnar legs
Leg structure in larger animals for weight support where weight will be born directly through the legs and to the ground.
Walking vs Running
Diff 1- Energy
Walking: kinetic and potential energy are opposites.
Running: kinetic and potential energy are at their lowest simultaneously and compensated by elastic energy.
Diff 2- Models
Walking: leg is stiff, and midstance where body weight is being transferred is a high point with more potential energy for falling.
Running: leg is a spring and midstance where body weight is being transferred is a low point with more energy stored as elastic.
Evolutionary transition in walking - friction
The mass must move or do work to overcome friction, creating by gravity, air and water resistance.
Evolutionary transition in walking - Distal limbs
Reduce mass in distal limbs to reduce the requirement of swinging foot and consequent consumption of energy.
Evolutionary transition in walking - weight support
A quadruped supports weight over its four limbs.
Bipeds support weight with two limbs.
Evolutionary transition in walking - foot
Size of foot alters pressure.
The smaller the foot, the higher the pressure.
Different parts of the foot bear different levels of pressure.
Bipedal Advantages
Raises head to allow greater field of vision.
Improved detection of distant dangers or resources.
Access to deeper water for wading animals.
Reach higher food sources with their mouths.
Non-locomotory limbs become free for other uses, including manipulation, flight, digging, combat or camouflage.
Trotting
Diagonal pairs of legs move forward at the same time with a moment of suspension between each beat.
Duty factor larger than 0.5 with no limb overlap.
Generally, higher speed is accomplished through stride frequency instead of length.
Pacing
Ipsilateral limbs move together in phase.
Galloping
Forelimbs and hindlimbs move in separate phases.
Occurs only in quadrupeds.
In a slow gallop (canter), limbs are slightly out of phase.
There is a true aerial phase.
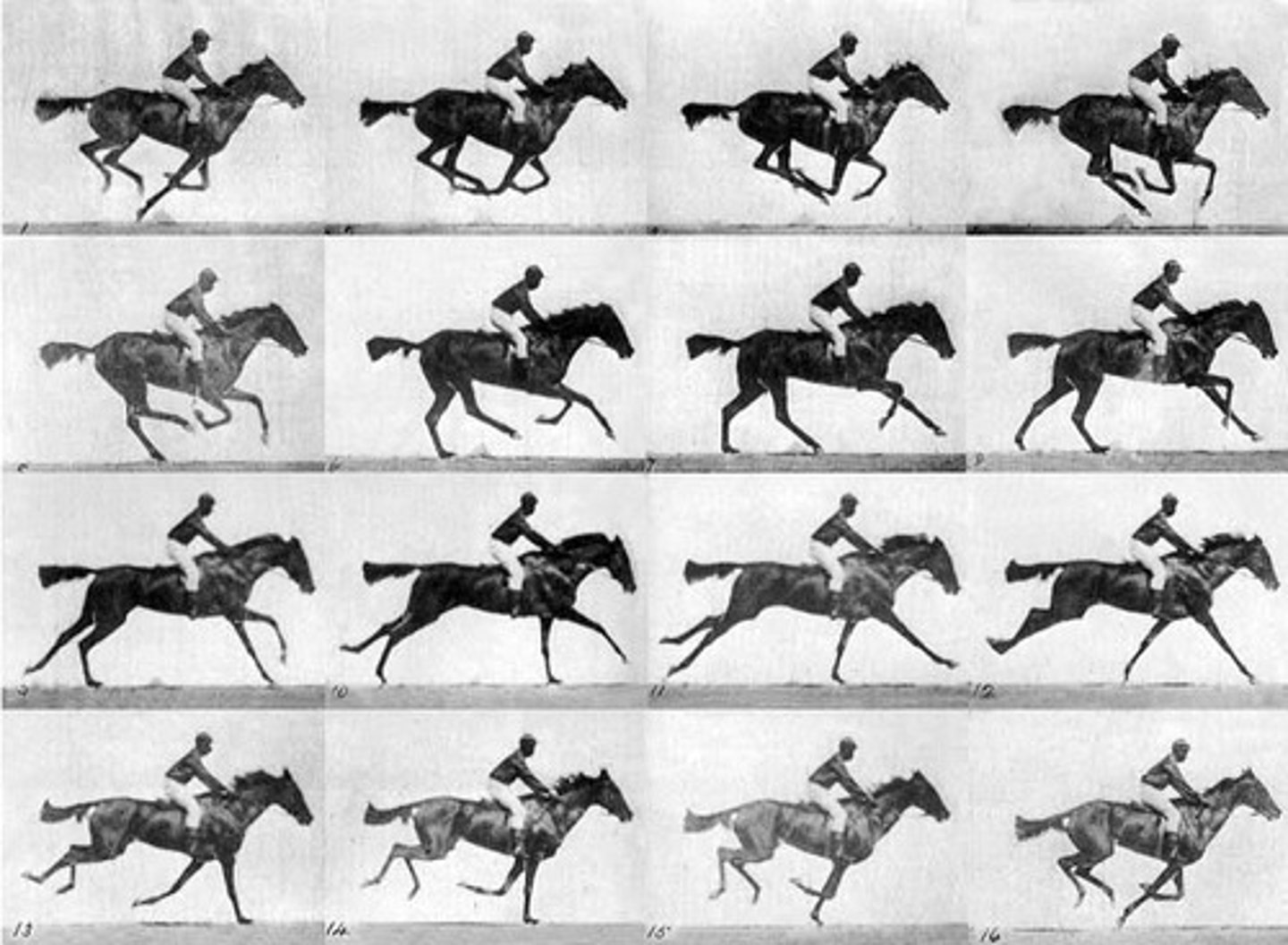
How can some animals achieve longer stride length?
Spinal flexion and extension, i.e., cheetahs.
Stability
When the forces are balanced and the body is in equilibrium, i.e., stationary or moving at a constant velocity.
Stable Equilibrium
Body returns to original state after displacement.
Stability - Triangles
CoM must be within a polygon made by the corners of feet.
Bipeds - feet can be large enough to create polygon with one or two feet.
Quadrupeds - known as stability triangle but only practical at slow speeds.
Stability - Statistically stable gait
Body is always in equilibrium at all steps at the step cycle, like quadruped or hexapod walking.
Stability - dynamic stability
when an animal return to stability after a distance.
Hominin
Species closer to humans than chimpanzees.
Bipedalism was first defining characteristic to emerge and predated other defining characteristics of Hominidae.
Last hominin common ancestor
between 5 and 7 million years ago.
Striding Bipedalism
Rare in mammals; unique to some primates.
Hominin - Foramen Magnum Position
Skull hole orientation affects bipedal balance.
Hominin - Pelvic Morphology
Wide pelvis supports vertical body posture.
Hominin bipedalism characteristics
Skull directly balanced on top of spine due to position of foramen magnum.
Curved spine.
Wide, cup-shaped pelvis with short iliac blades and a large hip joint,
Hip-up characteristics transfer weight through legs and support vertical trunk.
legs are long compared to arms.
Knee joints can extend and lock.
Highly unique foot with a robust ankle region and specialised arches for shock absorption.
Loss of arboreal capacity.
Primate Bipedalism Characteristics
Move bipedally but for short periods of time and inefficiently and ingainly.
Hips and knees are bend causing swaying.
Lack of pelvic morphology and specialist muscle attachment to support the body on weight-bearing legs.
Lucy
Australopithecus afarensis who was an early hominin showing bipedalism before brain growth.
Hominins evolved bipedalism first evidence
Laetoli footprint trail 3.7 ma showed two or more hominins walking bipedally.
Increase of brain size seen 1.8 Ma later - showing bipedalism predated it over by a million years.
Advantages for bipedalism for hominins in Miocene
Metabolic energy efficiency.
Reduced muscle use in walking, due to an upright posture that places GRF at hip and knee.
Chimpanzees take a crouched stance with bent knees and hips that when walking bipedally, it forces quadricep muscles to perform extra.
Was LCA of chimps and humans knuckle-walkers?
No. Initially thought so.
Disproved as chimps are more closely related to humans than gorillas so it must have evolved independently in both genera.
There isn't a Miocene ape that exhibits features related to knuckle-walking.
Ardipithecus ramidus remains indicated it was capable of bipedalism whilst also being highly arboreal with specialist adaption for climbing. No indication either for knuckle-walking features in the wrist and finger bones.
Foramen magnum
Skull opening for spinal cord alignment.
General mammal evolution of bipedalism
Evolved multiple times in macropods, kangaroo rats and mice, springhare, hopping mice, pangolins and apes.
Many primates and bear species adopt bipedal gait to reach food or explore environment, but there are few cases that is is constant.
Many animals rear up on hind limbs while fighting or copulating, reaching food, keeping watch, threatening a competitor or predator or posing in courtship, but do not move bipedally.
Origin of Dinosauria Bipedalism
All known therapods are obligate bipeds.
To some degree, it is a basal trait of all major dinosaur groups - some of the earliest dinosaurs were this. However, the oldest dinosauromorph footprints are quadrupedal, only afterwards does bipedalism begin.
Reasons for secondary quadrupedalism
Coincides with big body size, herbivory and body armour.
Four limbs are generally good for supporting large body weights.
Herbivory favours enlargement of digestive tract to accommodate the break down of cellulose. Hence the enlargement of abdominal cavity and disproportionate increase in mass anterior to the hips and hindlimbs.
Body armour is heavy and therefore requires more support.
Why did dinosaurs evolve bipedalism?
Thermoregulatory and vision-enhancing theory are disregarded - they had horizontal body positions and therefore no elevation of the head.
Hands-freeing theory can be valid but they didn't possess the large brain or dexterous hands like primates to effectively use them.
What are the advantages and disadvantages for hands-free theory for bipedalism in dinosaurs?
Advant - Free limbs can be used for capturing and subduing prey as early dinosaurs and their immediate ancestors had fused clavicles and grasping hands.
Disad - bipedalism for the sake predation isn't observed in other lines of predators, like varanids and felines.
Subsequent forelimb reduction after bipedalism indicated they didn't play a vital role in predatory success.
Bipedalism also retained in multiple lineages of advanced and medium-sized herbivorous ornithischians.
Modern Bipedal Lizards
Used mostly when runnings; Jesus lizard, spiny-tailed iguana and bearded dragon.
Fossiled bipedal footprints of iguana ancestor dated 110 million years ago so not new.
Wouldn't be possible in reptiles without long, relatively heavy tail to counterpoise head and trunk weight.
Bird Locomotion
Retraction of elongate portion of limb distal to knee using hamstring muscles.
Femur habitually held sub horizontal and hip motion greatly de-emphasised.
Have a walk-to-run gait transition that is continuous rather than discrete as seen in humans.
Changes between dinosaurs and birds
Shortening tail,
anatomical changes in proximal tail base and pelvis to pygostyle
reduction of size of the femoral fourth trochanter indicate that size in M.caudofemoralis longus was greatly reduced.
The change from hip to knee-based locomotion is due to change in CoM that shifted cranially with the tail reduction and evolution of large pectoral limbs - links to horizontal femur.
Jumping
Single motion without rebound or energy storage.
Terrestrial jumpers
Animals that jump from ground, e.g., frogs.
Launchers
Animals that push off surfaces to jump.
Birds launch bipedally.
Bat launch quadrupedally.
Pterosaurs were theorised quadrupedal launchers.
Advantages and disadvantages of pterosaurs being quadrupedal launchers
ad - reinforced forelimbs with sufficient range of motion.
dis - may not have been enough room to accommodate an immediate downstroke after the vault.
Running jumps
Jumps initiated during locomotion, often bipedal.
Standing jumps
Jumps initiated from a stationary position.
Jumping ballistics and projectile motion
Impact forces are 3x the take-off - during time to launch, force increases.
Frog example for ballistics and projectile motion
in theory, journey should form a parabola where the height is the highest point.
There are two directional forces pf the initial push; vertical - to get the feet of the ground
horizontal - propel forwards.
Parabola arc focuses on CoM and legs train behind.
during push off, frog will already have some height and mass, and when it lands there will be some horizontal force.
Air resistance
resistance between air and another material.
Only applicable to animals less than 10g.
Consumes 75% of flea jump energy and 5% in frogs.
Frog legs
Long hindlimbs and short forelimbs - specialised to walk on land and swim in water.
Meaning short step with forelimbs and long steps with their hindlimbs.
Long hindlegs make them good jump - jump height is dependent on work, therefore smaller legs means less distance and time for acceleration - time for muscle contraction.
Catapulting
Kinetic energy is turned to elastic energy.
Elastic energy is stored in tendons or exoskeletons.
Takes while to build up sufficient level of elastic energy but released almost instantly.
They make use of the catch mechanism.
Catch mechanism through grasshopper example
System storing elastic energy for efficient jumps found in some insects and grods.
when grasshoppers sit, it stores elastic energy for jumping by contracting the extensor and contractor muscles.
Contraction of muscles and tendons work in tandem.
Heilter's lump acts as a catch to maintain the elastic energy.
Spring in the knee relaxes one of the muscles and leads to the relaxation of the extensor muscles that sends the grasshopper into a jump.
Primitive frogs
Abdominal ribs and epipubic cartilage that is stringier on pelvis to protect internal organs as they face plant after jumping.
Derived frogs
Fused radius and ulna to withstand high forces. Supra-scapula cartilage acts as a shock absorber. as they land on their forelimbs.
Crawling
Relies on standing and traveling waves.
Terrestrial locomotion depending principally on movements of the body rather than of limbs.
There are three types;
two-anchor
peristalsis
serpentine
Crawling animal examples
snakes, limbless lizards, worms, caterpillars and terrestrial molluscs.
Two-anchor crawling
two or more anchor points alternately push and pull the body forward at a constant frequency.
anchor points can be bristles and hooks called setae that create friction against the underside.
Three-anchor crawling
these animals have the front and back anchored first, and the middle anchor constantly moves along, but slower than the others.
A wave can be used to propagate the movement.
Anchor crawling examples
seen in insect larvae and vertebrates, like lung fish.
Peristalsis
the involuntary constriction and relaxation of the muscles of the intestine or other canal, creating wave-like movements that push the contents of the canal forward.
waves can propagate forward or backwards to move onwards.
Also anchored by setae along the bottom of the animal.
Forward and backwards waves of peristalsis
when wave moves from front to back, the long sections of muscle are moving it along.
When the waves move from back to front, the long sections of muscle are anchoring it.
setae benefits in peristalsis
they prevent the segments moving backwards.
they make the forward and backwards friction different - the frictional force keeping it from sliding back must be more than the friction force on segments moving forward.
Worm structure and peristalsis
circular muscle - makes segments narrower.
longitudinal muscle - makes segments shorter and fatter.
at small strains, 1% shortening in circular muscle requires 2% extension in longitudinal muscle.
muscular hydrostats - made of muscle with no rigid skeleton where the fibres have specific orientations. The combination of fibre and fluid gives a huge diversity and complexity of motion. Liquid pressure offers antagonistic capability in earthworms, as a skeleton would in vertebrates.
peristalsis Crawling molluscs
muscular foot allows them to move by peristalsis via back to front movement.
the waves of muscular contractions are visible. The shift in muscle contractions alternate left to right and allow directional change.
No setae and instead rely on viscosity by secreting mucus on the bottom of their foot and the viscosity of it is dynamic. By increasing pressure, and therefore viscosity, increases friction.
Serpentine crawling
body assumes a series of s-shaped horizontal loops and have small belly scales that push against the ground using friction.
Relies on axial and transverse friction.
On a treadmill, this locomotion in snakes has the same metabolic cost of transport as mammals and birds of same mass.
nematodes also use this mode of locomotion.
Sidewinding crawling
unique to snakes and relies on lifting each section of the body and moving it forward.
effective on loose sand and smooth surfaces where friction cannot be used.
Burrowing
A locomotion method where animals dig and move through substrates like soil or sand, often using limbs or specialized body structures to create tunnels.
Uses similar motions to crawling in the case of invertebrates.
Two-anchor bivalve burrowing
anchor starts with the shell.
foot protrudes when it opens and closes off valves to expand the foot.
foot pushes against substrate and becomes anchor allowing them to pull the shell towards them.
snake and lizard burrowing
they move like a concertina and have multiple anchor points to burrow.
Mammal burrowing adaptions
moles, armadillos, giant ground sloths and rabbits use their forelimbs.
Mole rates and rodents use their teeth.
mole rats use their upper incisors as an anchor point and close their mouth and spit out the dirt. they will use their forelimbs to push away the loose dirt to keep space clear.
mole and rat ulnas are differently shaped. Moles have a higher aspect ratio and hence a thicker cross section, meaning they have a restricted sagittal range of movement.
Forces involved in flight
Drag
thrust (counteracts drag)
weight (mass and gravity)
lift (counteracts weight) - split into vertical and forward dertection.
All interact to determine velocity.
Drag (flying and swimming)
Resistance to motion in a fluid.
friction and parasitic drag are most important.
frictional drag - caused by the fluid moving over an object through its resistance to being sheered. higher in more viscous objects. fish scales are often interlocked to reduce this.
pressure drag - forms from differences in pressure around an object and influenced by shape. higher pressure at stationary parts in front of an object with low pressure behind it. can be reduced by hydrodynamic shapes.
Particle kinetic energy in the wake of movement - energy loss to cortices and induced drag or “downwash.”
Reliant to Reynolds number (link between speed, length and fluid viscosity).
Lift
most important of the forces for flight.
when a symmetrical body moves straight through a fluid, it only has drag. However birds are not dorso-ventrally symmetrical.
Bird wings have a longer top than bottom, creating a pressure differential (less pressure above than below) that pulls wing up towards lower pressure space of top wing.
Man-made fliers
decouple thrust and lift, unlike natural fliers who generate both using wings.
Aerofoils
a shaped surface designed to generate lift when moving through a fluid like air or water.
wingspan - measuring longways across (including the body from wing tip to wing tip).
chord - depth of wing.
wing area - length x height of wing
canva - curvature of wing
angle of attack - angle of wing relative to air flow.
Induced drag
the imparted momentum during flight creates a circulatory flow that comes off the wing tip, creating a spiral of air. the particles will spin.
Aspect Ratio
wingspan vs wing area shows how efficient flying is by how much wingspan effects movement of air.
increasing AR, easier to avoid drag and fly longer, but bad for manoeuvrability and has higher bending stresses due to large size.
Wing loading
lower wing loading, more lift.
Scaling issues; lift requirement depends on mass, but lift production depends on area. A heavier bird needs a bigger wing area for same lift.
Flying animal examples
invertebrate - insects (first animals to fly), spiders and squids.
Vertebrate - bats, birds and pterosaurs
Birds
evolved from theropods 150 million years ago.
Homeothermic specialised breathing with hollow bones and air sacs (pneumatisation) to reduce weight. feathers make up aerofoil.
small birds - 80% of lift of initial take off is from jump.
larger birds - take advantage of wind but if not will running start or jump off cliff.
Bat
appear 50 million years ago, already bat-like. Homeothermic with reduced cortical (thick and dense covering of bone) thickness of bones.
canva created by overlapping wings to create a thicker part toward the bone and thinner part towards the ends. membrane stretched between fingers and legs to make aerofoils
bats - propel off their forelimbs and once they start falling, they will flap their wings to generate lift.
Pterosaurs
Appeared 228 million years ago and went extinct with the dinosaurs 66 million years ago. Large variations of forms, can have 10m wingspan, but most were bird size.
Assumed to be homeothermic, based on pycnofibres. They had hallow bones like birds, but larger pterosaurs also had pneumatisation like birds.
Made of a membrane but attached to fourth finger where others are used for terrestrial locomotion and loss of thumb. Also have pteroid bone allowing them to control wing angle and leading edge vortex.
bats - propel off their forelimbs and once they start falling, they will flap their wings to generate lift.
pterosaurs - theorised they took off by extended crouch and launch themselves off like bats. would probably use hindlegs alongisde forelimbs.
Powering flight
vertebrates - muscles are main power suppliers. Smaller muscles to pull the wing up than to pull them down.
invertebrates - fly by moving their whole carapace. when it goes down, wings go up, fuelled by muscles in thorax. no muscles in wings.
gliding
no thrust generated.
utilises weight by generating lift by gliding at a certain angle.
slope soaring
rate of sink is less than rate of wind rising.
thermal soaring
uses rising hot air that is heated by ground.
rises in a column that birds circle - centre rises faster but tighter turn leaves less for lift.
Hovering
kestral - hover by keeping themselves stationary relative to the ground.
Hummingbirds - hover by keeping stationary relative to the air.
easier when small (insects, small bats, small birds for a few seconds). most drive air downwards and generally generates lift on both down and up stroke. wings will turn upside down for back stroke.
Forward flight gaits
drive air backwards and tilt forward.
slow and fast gaits and vortices
one of the most complex forms of locomotion.
bounding
allowing a coast, to allow gain of energy and time, can also allow change of angle of attack.
Floating
Being suspended in a fluid where no energy or powered motion is used for keeping at level and equilibrium, and allowed for by buoyancy.
CoM is where mass is equally distributed throughout. centre of buoyancy (CoB) is volume of animal where mass of water is equal in all directions. CoB above CoM when floating.
Different positions when floating, lungs will most likely be higher than legs due to air in lungs.
Buoyancy
the force pushing back on the object in water.
if buoyance and weight is balanced, object will float.
pressure greater at depth than shallow - same for object with lower pressure at top and higher pressure at bottom, difference allows buoyancy.
force proportional to weight of fluid displaced hence not dependent on density. less sense, more water is displaced for given mass.
Buoyancy Aids
fish control buoyance through swim bladders - air-filled sac near digestive system, analogous to lungs.
mammals control with lungs.
sharks have large liver with specific density 0.885, less than water.