3. Finite Volume Methods
1/7
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
8 Terms
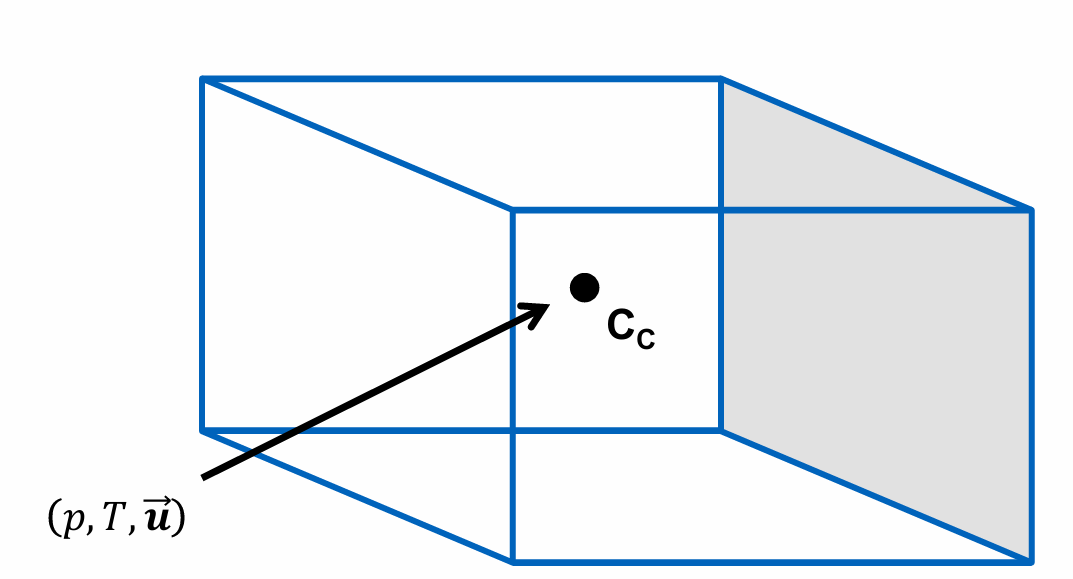
Describe how Finite-Volume Method is used to discretise a generic 3D polyhedral cell
flow variables (p, T, u) vary linearly across the cell
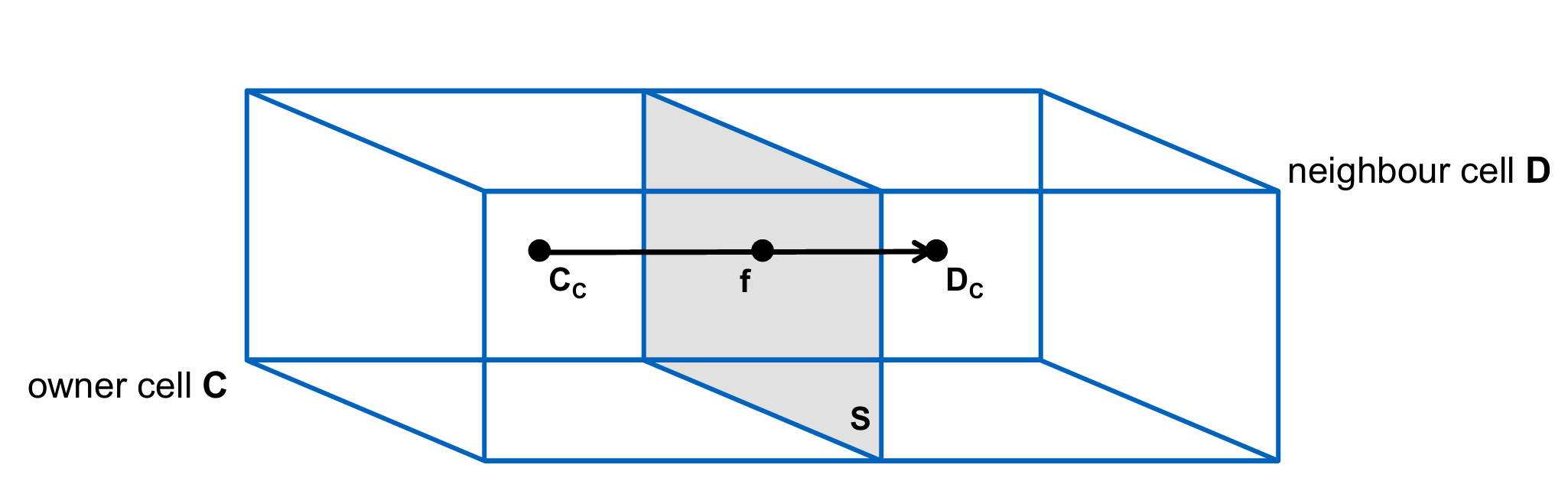
flow variables are calculated at the cell centroid C_c, C_d
cell has a volume V_c
The location where the vector \overline{C_{C}D_{C}} intersects face S is the face center 𝑓.
\int_{V}\left\lbrack\nabla\cdot\left(u\cdot u\right)+\frac{1}{\rho}\nabla p-\nabla\cdot\left(v\cdot\nabla u\right)-g\right\rbrack dV=0
\int_{V}\left\lbrack\nabla\cdot\left(u\cdot u\right)\right\rbrack dV=\int_{V}\left\lbrack-\frac{1}{\rho}\nabla p\right\rbrack dV+\int_{V}\left\lbrack\nabla\cdot\left(v\nabla u\right)\right\rbrack dV+\int_{V}\left\lbrack g\right\rbrack dV
→ We need them in the following matrix form for the SIMPLE algorithm:
\overline{M}u=b
where
\overline{M} is a matrix of coefficients
What is a typical constant source term ?
→ gravity
\int_{V}\left\lbrack g\right\rbrack dV=gV_{c}
Considering the matrix form, we append the gravity force to the right-hand side (b vector)
\overline{M}u=b
How is a linear source expressed in the Navier-Stokes Equations?
\int_{V}\left\lbrack Su\right\rbrack dV=S_{C}u_{C}V_{C}
2 options:
1) We add -S_{C}V_{C} to the \overline{M} matric (implicit treatment)
2) We add S_{C}u_{C}V_{C} to the b vector (explicit treatment)
\overline{M}u=b
How do we solve the Convection Term of the Navier Stokes Equation across the cell (C)
We use the divergence theorem to convert the volume integrals to surface integrals
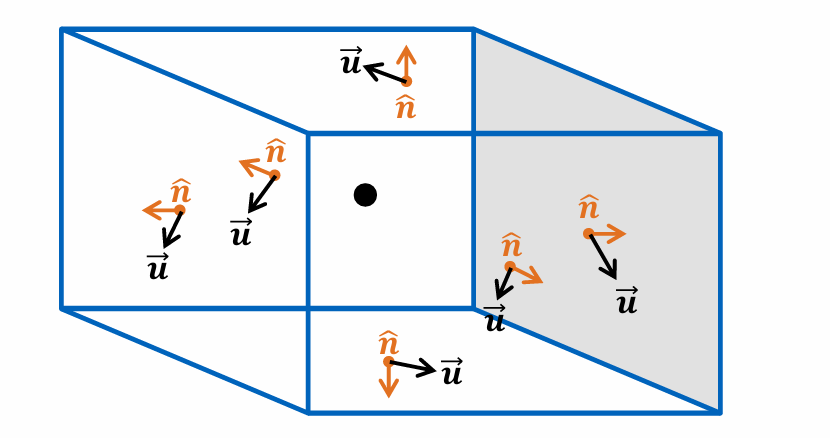
The dot product of the velocity, the unit normal vector and the surface element results in the volume flow rate out of the surface
The other velocity outside the bracket u is the unknown we are solving for
The velocity is transported by the volume flux
We can approximate the value at the face centre (f)
\sum_{f=1}^{_{}N}\int_{S}u\left(u\cdot n\right)dS_{f}=\sum_{f=1}^{_{N}}u_{f}\left(u_{f}\cdot n_{f}\right)S_{f}
How do we solve the Diffusion Term of the Navier Stokes Equation across the cell (C)
\int_{V}\left\lbrack\nabla\cdot\left(v\cdot\nabla u\right)\right\rbrack dV=\int_{S}\left\lbrack v\left(\nabla u\right)\cdot n\right\rbrack dS=\sum_{f=1}^{N}v_{f}\left(\nabla u\right)_{f}\cdot n_{f}\cdot S_{f}
velocity gradient \left(\nabla u\right)_{f}
kinematic viscosity v_{f}
What is face non-orthogonality
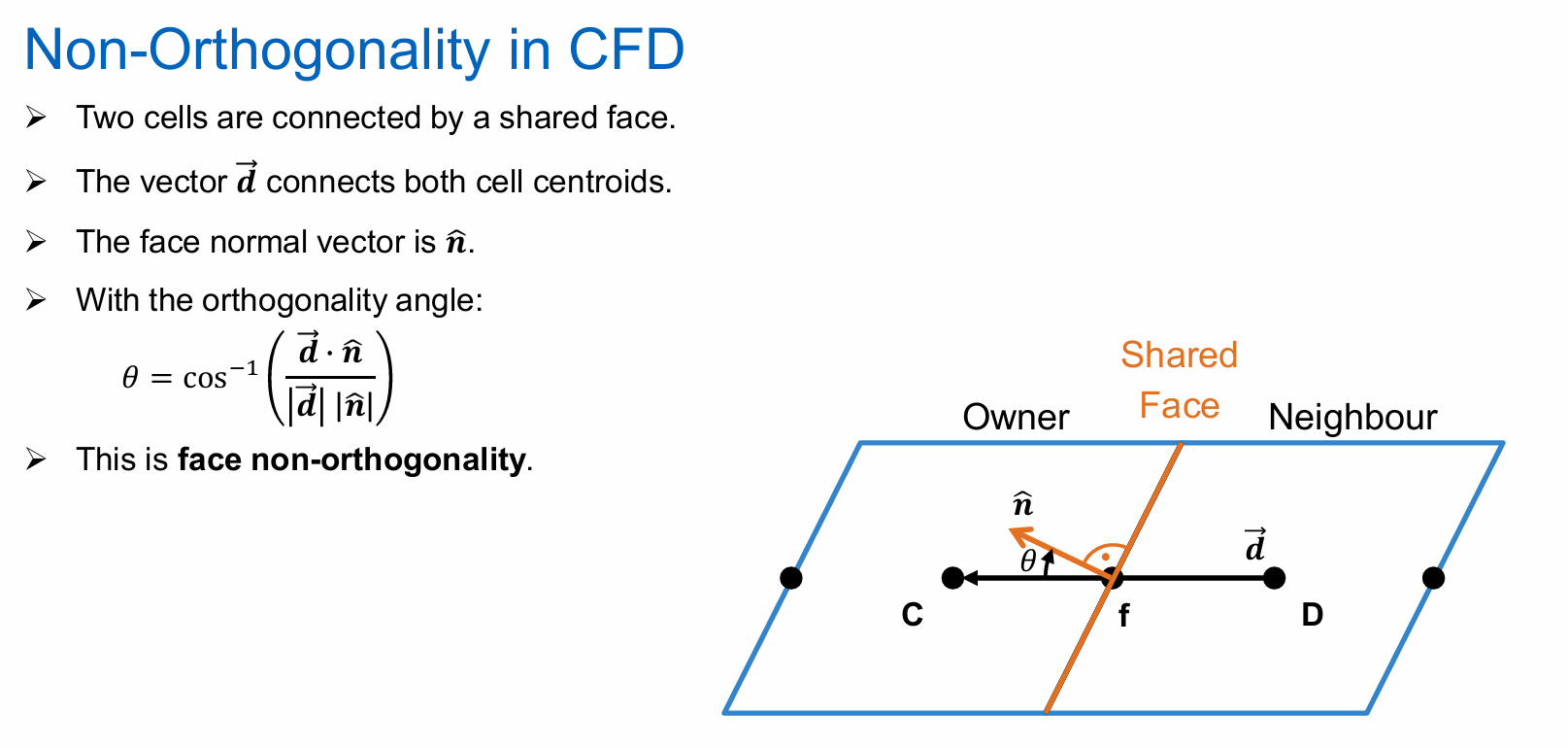
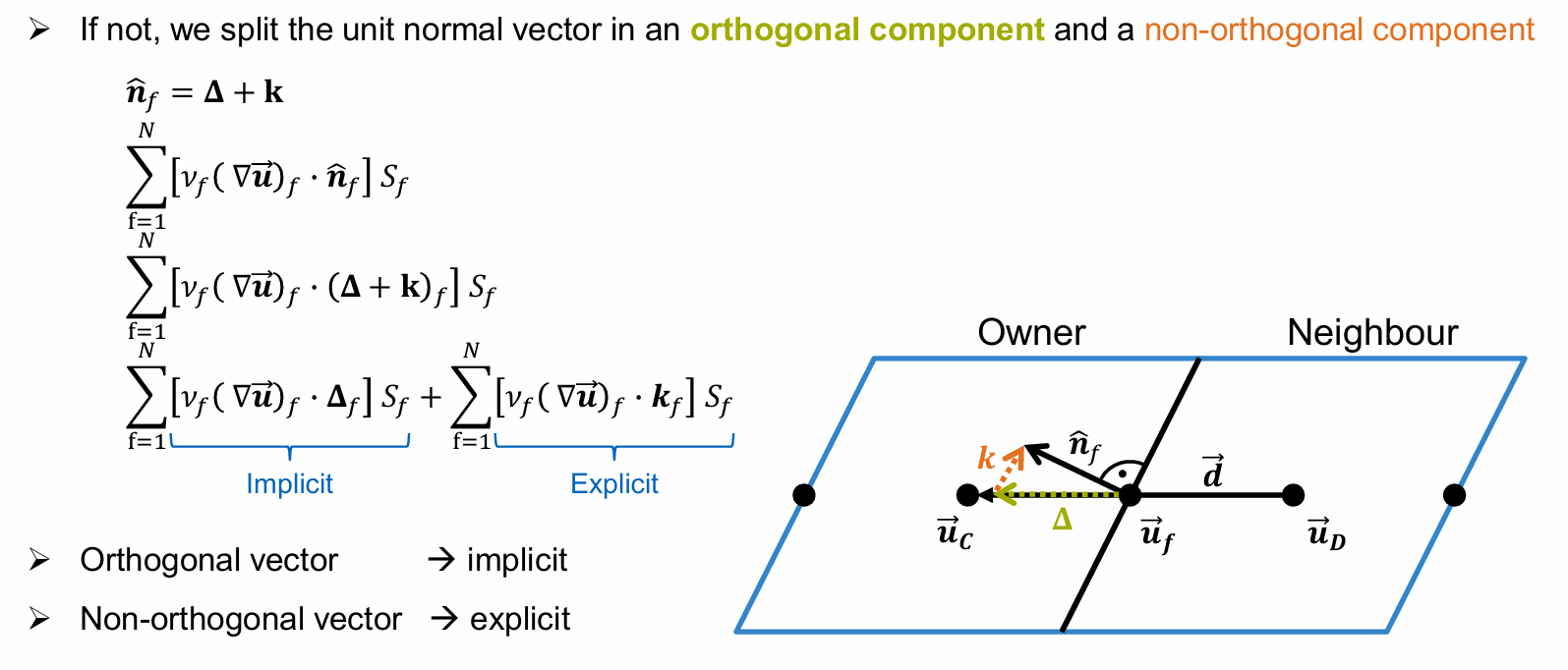
What do the orthogonal & non-orthogonal components of unit normal vector ?
Orthogonal Component → implicit → Term increases stability
Non-orthogonal components → explicit → Term decreases stability
The higher the non-orthogonality of the mesh:
The larger the explicit term
The smaller the implicit term
How do we solve the Navier-Stokes Equations numerically?
→ SIMPLE algorithm
\overline{M}u=b
Steps:
Solve the momentum equation for the velocity field. This velocity field does not satisfy the continuity equation
\overline{𝑀}𝒖=-𝛻p , Separate M into diagonal 𝑨 and off-diagonal 𝑯 components: 𝑀 𝒖 = 𝑨 𝒖− H
Solve the Poisson equation for the pressure field
𝛻\cdot\left(\overline{A}^{-1}𝛻p\right)=𝛻\cdot\left(\overline{A}\overline{^{-1}H}\right)
Use the pressure field to correct the velocity field so that it satisfies the continuity equation
u=\overline{A}\overline{^{-1}H}-\overline{A}^{-1}𝛻p
The velocity field now does not satisfy the momentum equations. Then repeat the cycle