momentane Bewegungszustände
1/66
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
67 Terms
Der Rotationsanteil ist immer senkrecht zu AB
Alle Geschwindigkeiten unterscheiden sich nur durch ω×AB
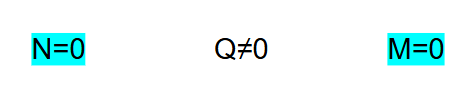
Immer null, niemals ungleich null

AB ist NICHT null
Aber Länge von AB bleibt konstant
Nur die Richtung ändert sich (Rotation)
Momentane reine Translation
ω=0
Translation entlang ω
Rotation um ω
Schraubung
Auf der Zentralachse gilt:
Geschwindigkeit ist parallel zu ω
Keine Querbewegung
MO=∑(ri−rO)×Fi
Gesamtmoment um Punkt O
Schraubung (Zentralchse existiert immer)
Lage der Zentralachse

R * M ≠ 0
Schraubung
Mz = 0
R ≠ 0
R * M = 0
reine Translation
R = 0
M ≠ 0
R * M = 0
reine Rotation
R || w
Schraubung
Kräftegruppe kann nicht auf einen Punkt auf der Zentralachse reduziert werden
Moment von Punkt auf Zentralachse ist ungleich null (es müsste null sein)
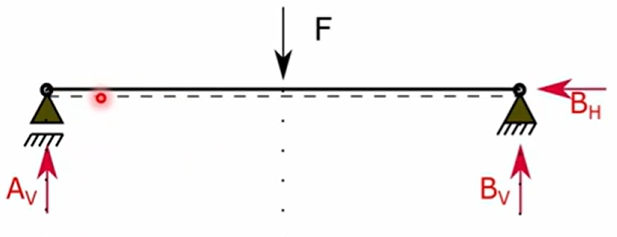
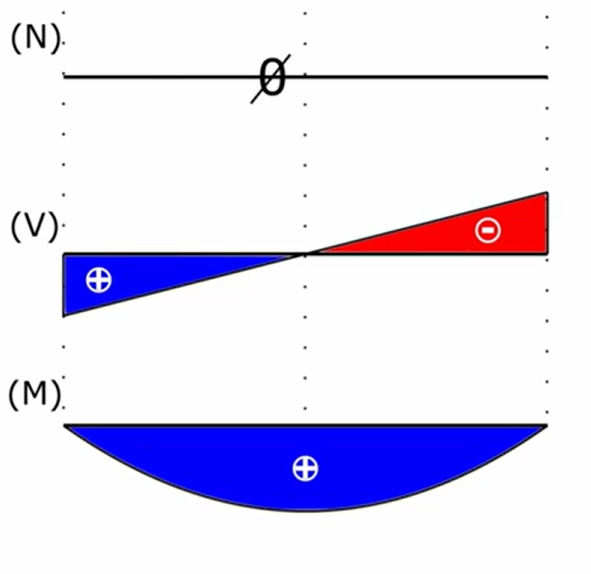
Einzelkraft

Einzelmoment
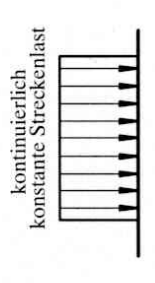
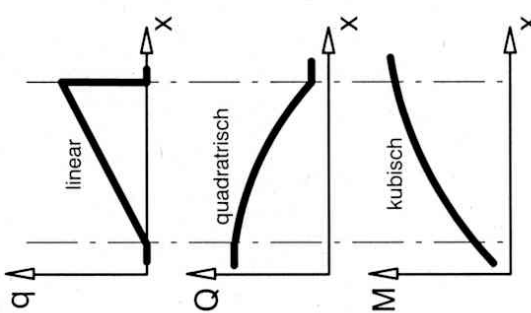
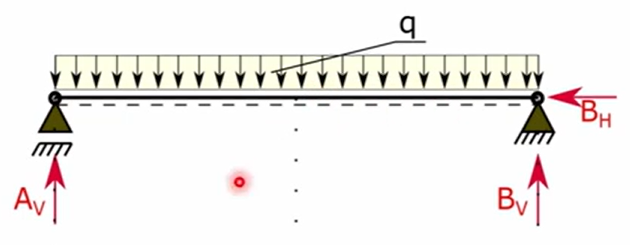
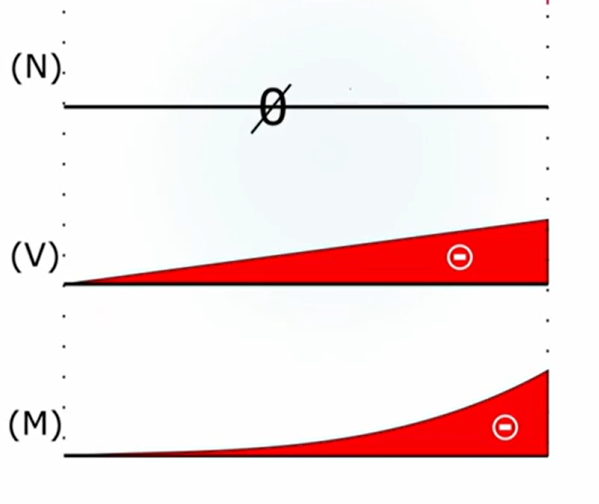
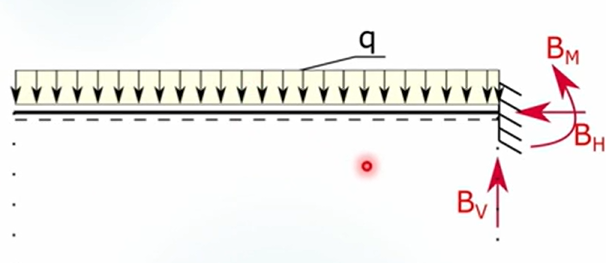
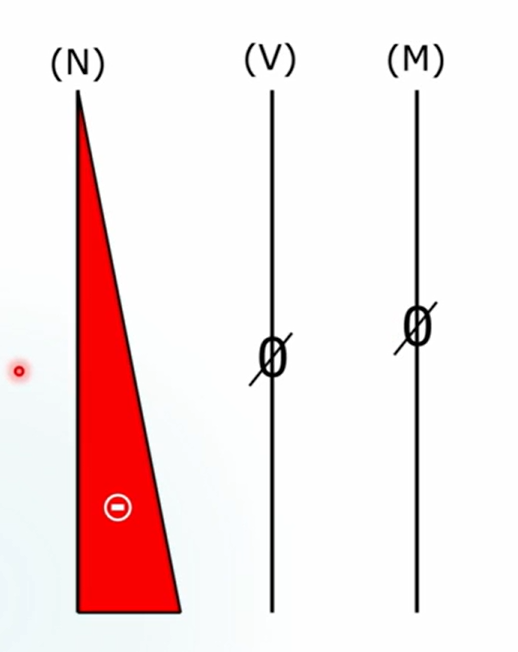
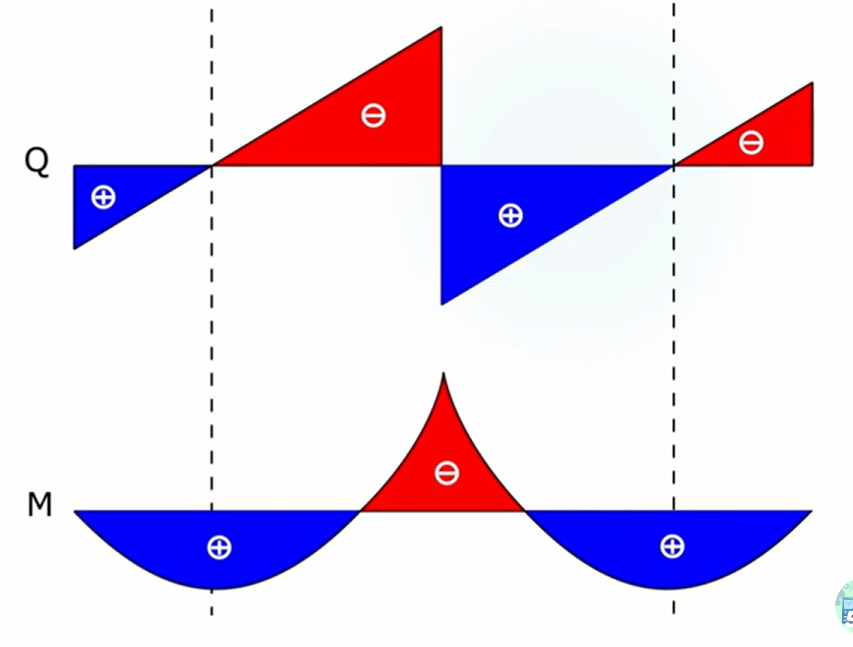
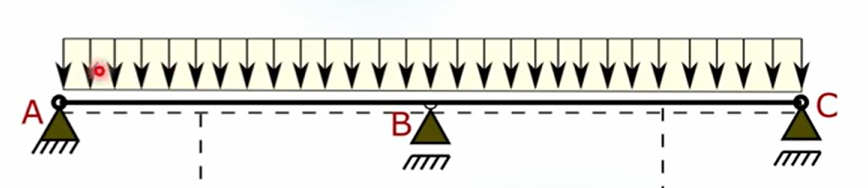
linienverteilte Kraft
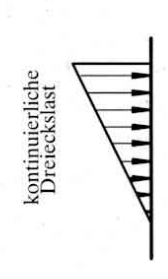
dreiecksverteilte Kraft






keine Garantie für momentane Rotation (kann auch Schraubung sein)

momentane Rotation

Relativgeschwindigkeit steht immer senkrecht auf AB
gilt für alle momentanen Bewegungszuständen (ausser reine Translation weil delta v = 0)
Schraubung
Momentane Rotation
Resultierende Kraft = 0 —> keine Einzelkraft
geschlossene Schleife von Kräften
moment ist ortsunabhängig (reiens Moment - Kräftepaar)
R = 0
—> P = M * w
Gesamtleistung bei Schraubung
M senkrecht auf Zentralachse
Leistung ist 0

Gleichgewicht
S=(sum of A * rs) / (sum of A)
Schwerpunt
erste Invariante = 0
zweite Invariante = 0
Translation/Stilstand
erste Invariante ≠ 0
zweite Invariante = 0
Rotation
erste Invariante ≠ 0
zweite Invariante ≠ 0
Schraubung
gilt für alle momentanten Bewegungszuständen (Rotation und Schraubung)
Alle Punkte haben die gleiche Geschwindigkeitskomponente entlang ω
Unterschiede in v sind immer quer zu ω

keine Translation
unabhängig wo Punkte A und B liegen
gilt immer, sobald ω≠0\omega \neq 0ω=0
nicht nur für reine Rotation!
auch möcglich wenn P nicht auf der Zentralachse liegt
auch möglich wenn der Körper rotiert oder schraubt
Geschwidnigkeitsfeld ist nicht injektiv
Gleiche Parallelkomponente zu ω bei allen Punkte
Relativgeschwindigkeit ⟂ Verbindungsvektor
Gleiche Geschwindigkeiten ≠ gleiche Lage
Translation ausgeschlossen, sobald vA×vB≠0
Merksätze
Kräftegruppe nur dann auf eine EInzelkraft reduzierbar
Moment steht senkrecht zur Resultierenden
keine Schraubung, kein Kräftepaar
Moment unterschieden sich nur im Betrag, nicht Richtung (heisst Ma || Mb)

Gleichgewicht
statisch äquivalent (nicht Kräfte sind identisch)
Kräftegruppen haben gleiche virtuelle Leistung
keine virtuelle Leistung (Kräfte parallel zur Rotationsachse)
virtuelle Rotation um Achse w
2 Kräftegruppen haben im beliebigen Punkt diesselbe Dyname
statisch äquivalent
R ≠ 0
zweite Invariante = 0
Einzelkraft
R = 0
Mp = 0
Nullsystem
R ≠ 0
zweite Invariante ≠ 0
Schraubung
R = 0
Mp ≠ 0
Kräftepaar (Moment)
R = 0
M = 0
Hauptsatz der Statik (Ruhelage des Systems)
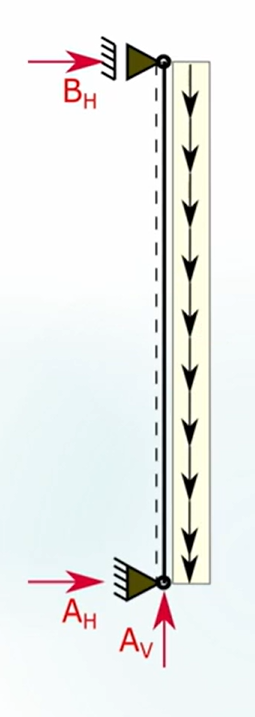
ist an beiden Enden gelenkig gelagert
kann nur Kräfte in Stabrichtung aufnehmen —> nur Zug/ Druck (keine Querkräfte und Biegemomente)
externe Kräfte greifen nur an Knotenpunkten an
Pendelstütze
Normalkraft wirkt innerhalb des Körpers
nicht kippen
N muss grösser als 0 sein (kein abheben)
Standfestigkeit









