Chapter 8: Statics and Torque - Review Terms
1/37
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
38 Terms
First Condition of Equilibrium
The net external force on a system must be zero for it to be in equilibrium.
Torque
A measure of the force that can cause an object to rotate about an axis.
Second Condition for Equilibrium
The net external torque on a system must be zero for the system to be in equilibrium.
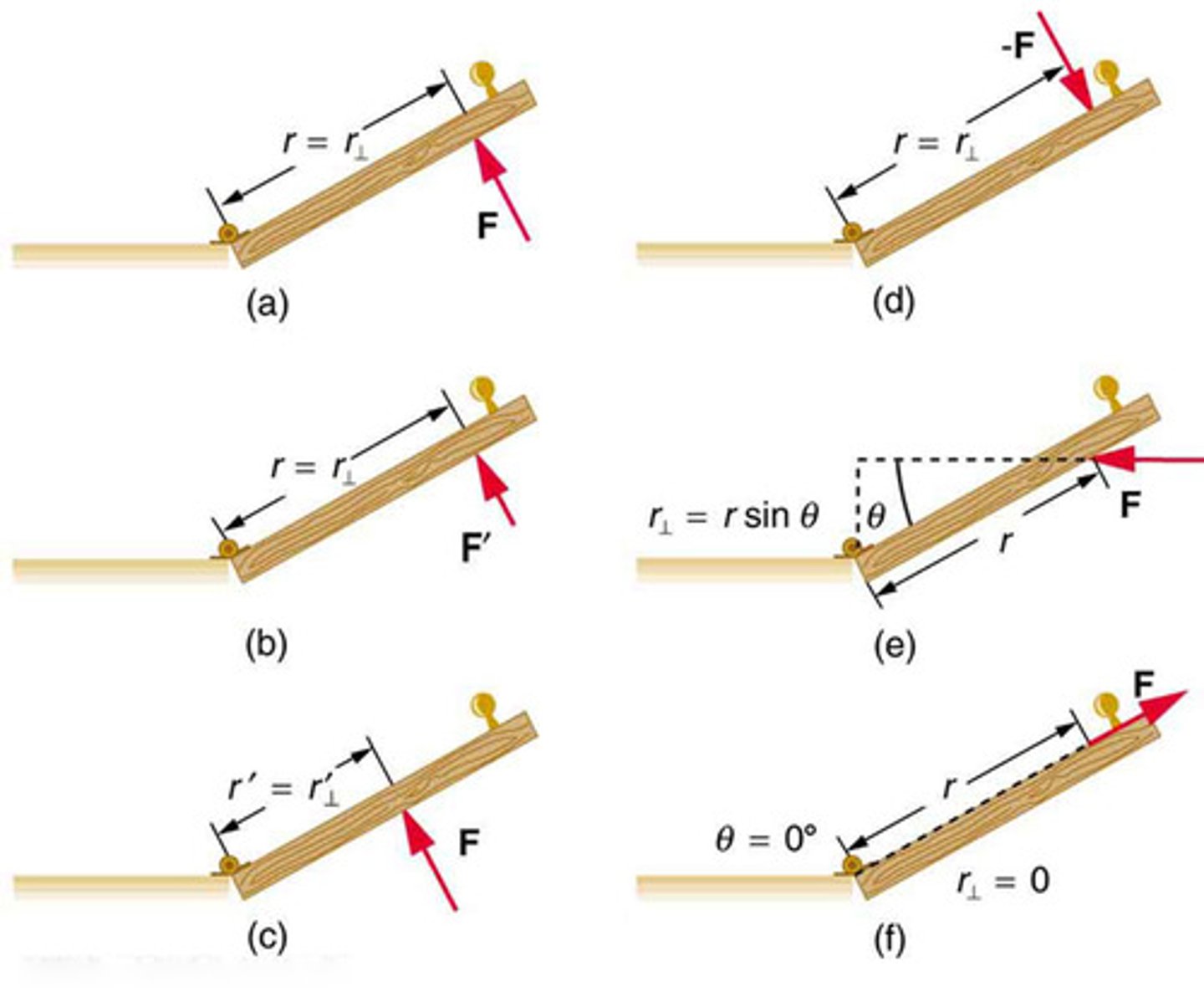
Torque
A measure of the effectiveness of a force in changing or accelerating a rotation, defined as τ = rF sin θ, where τ is torque, r is the distance from the pivot point, F is the force magnitude, and θ is the angle between the force and the lever arm.
Perpendicular Lever Arm (r⊥)
The shortest distance from the pivot point to the line along which the force acts, used to calculate torque as τ = r⊥F.
Pivot Point
The point around which torque is calculated; can be any point in or out of the system of interest.
Net Torque
The sum of all torques acting on a system, which must be zero for equilibrium.
Example of Torque: Door
Illustrates how the magnitude, direction, and point of application of force affect torque when opening a door.
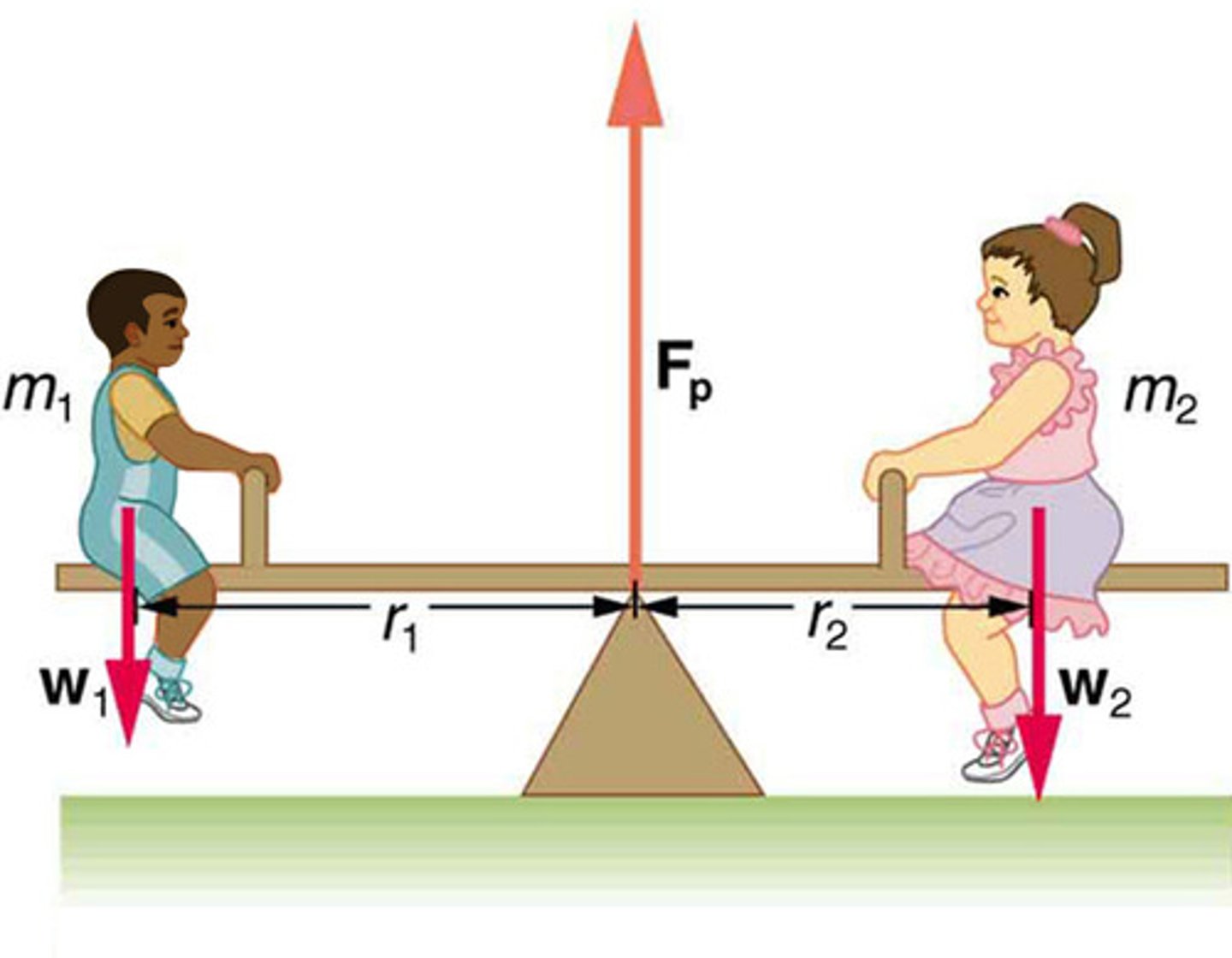
Seesaw Example
Demonstrates the application of torque and equilibrium conditions using a seesaw with two children of different masses.
Torque Equation
τ = rF sin θ or τ = r⊥F, used to calculate the torque based on force and lever arm.
Equilibrium
A state in which opposing forces or influences are balanced.
Stable Equilibrium
A condition where a system returns to its original position after being displaced, due to a restoring force or torque.
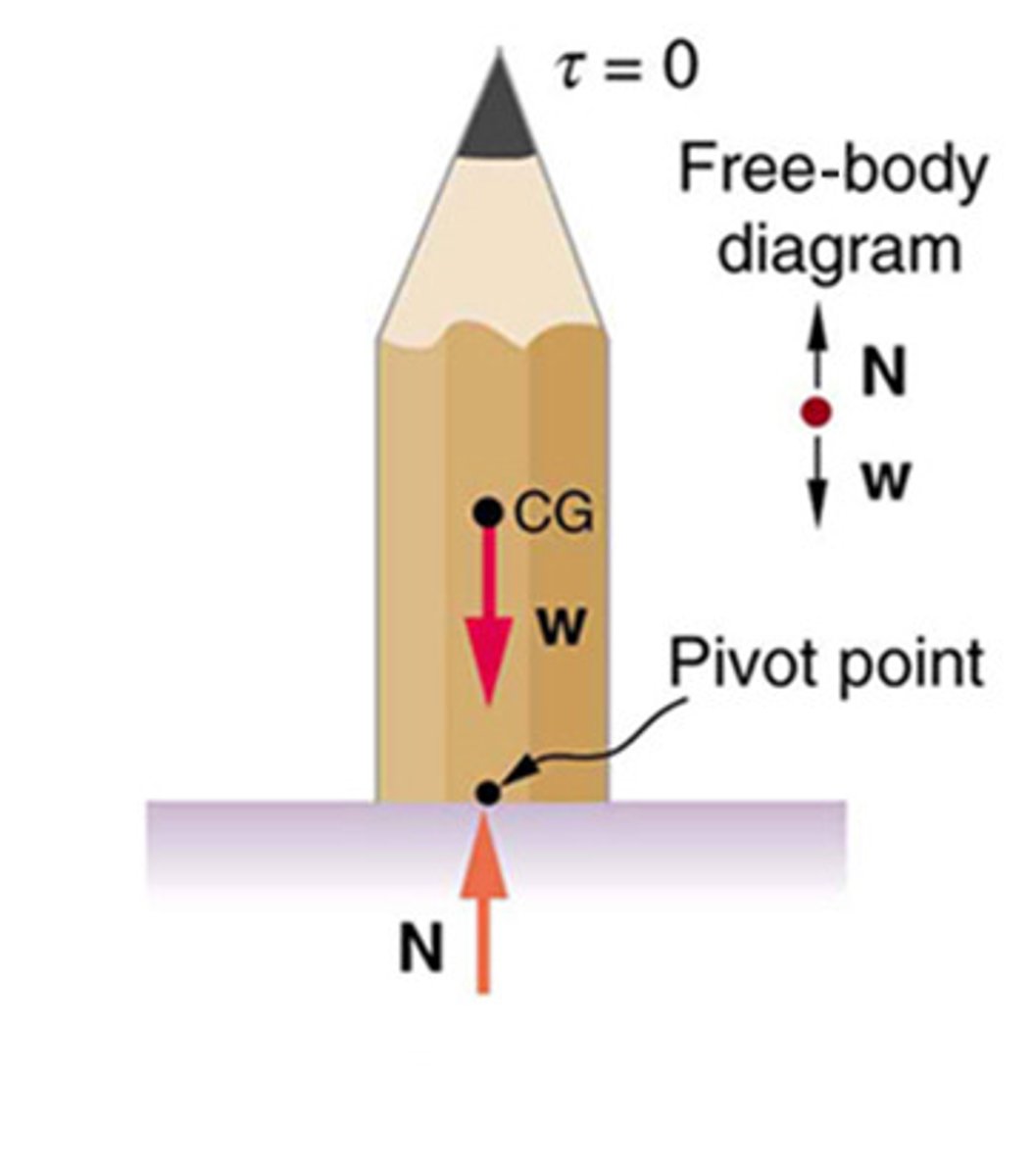
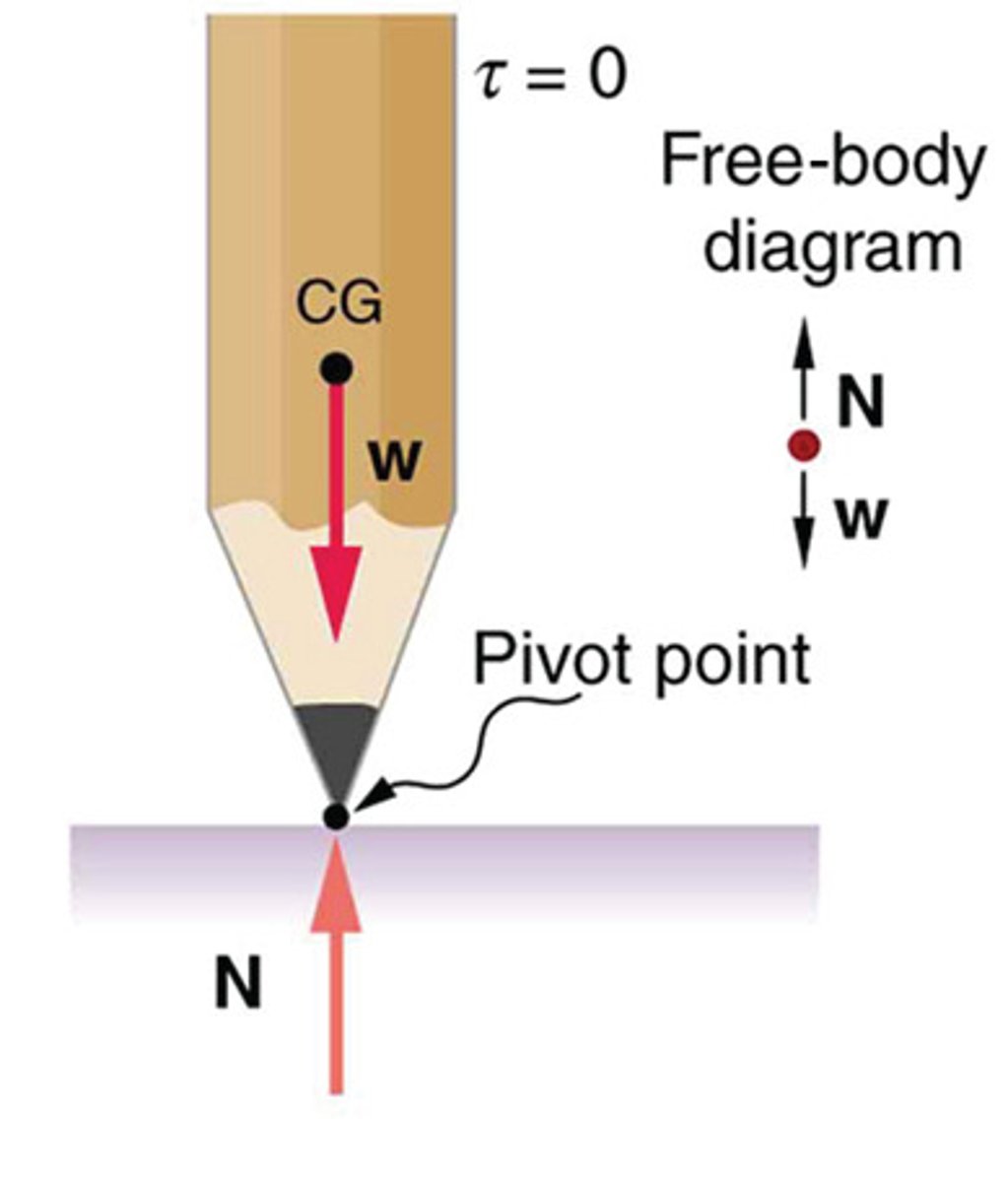
Unstable Equilibrium
A condition where a system moves further away from its original position after being displaced, due to a force or torque in the same direction as the displacement.
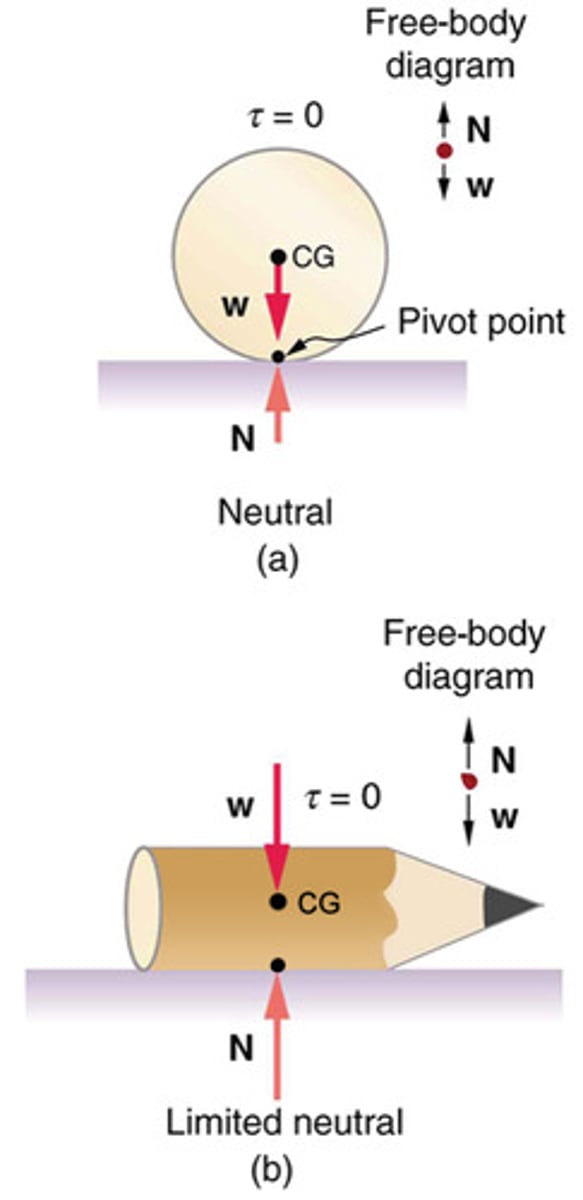
Neutral Equilibrium
A condition where a system's equilibrium is unaffected by displacements from its original position.
Center of Gravity (cg)
The point at which the total weight of a body or system is considered to act.
Critical Point
The point at which a system in stable equilibrium becomes unstable, often when the center of gravity is no longer above the base of support.
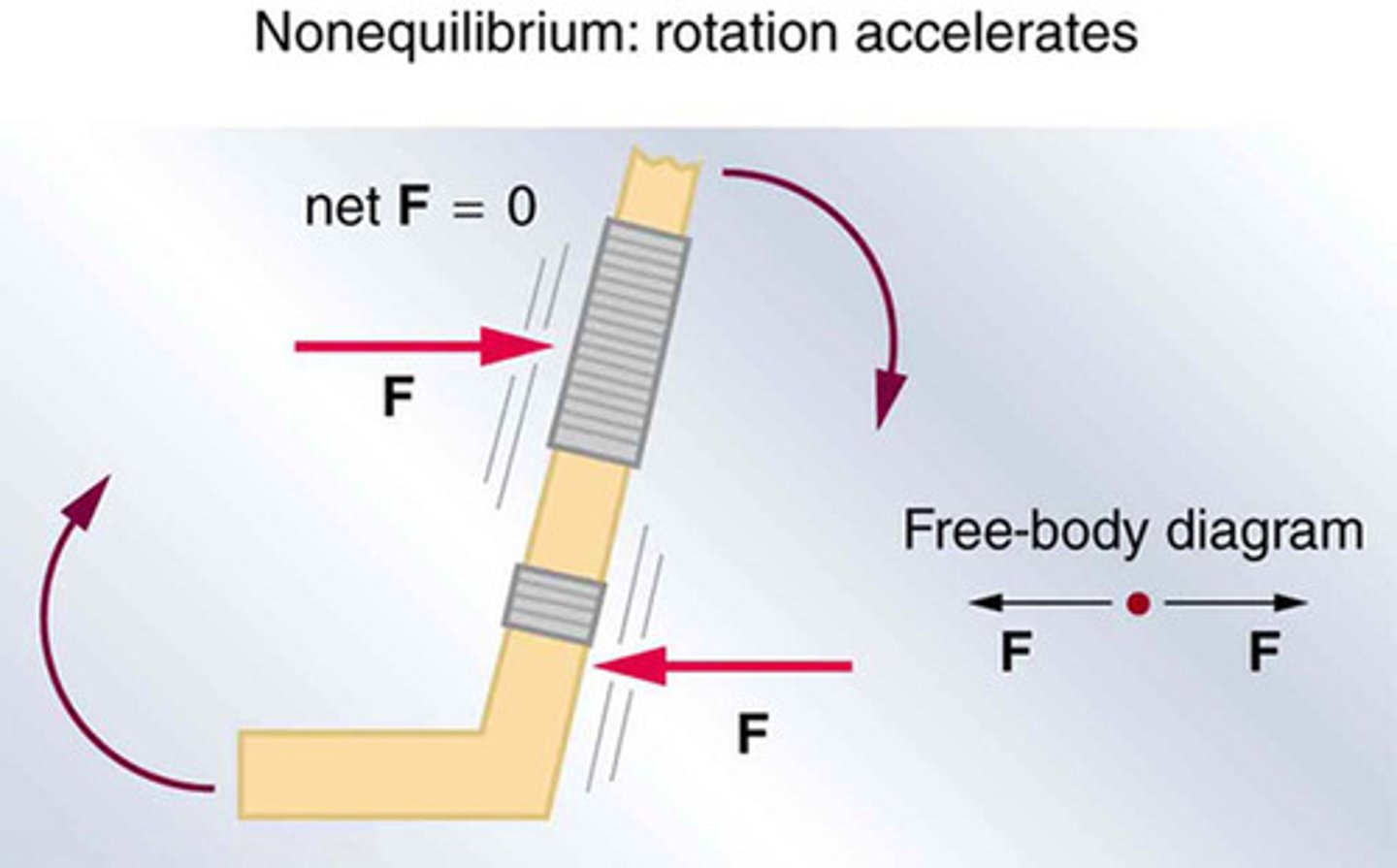
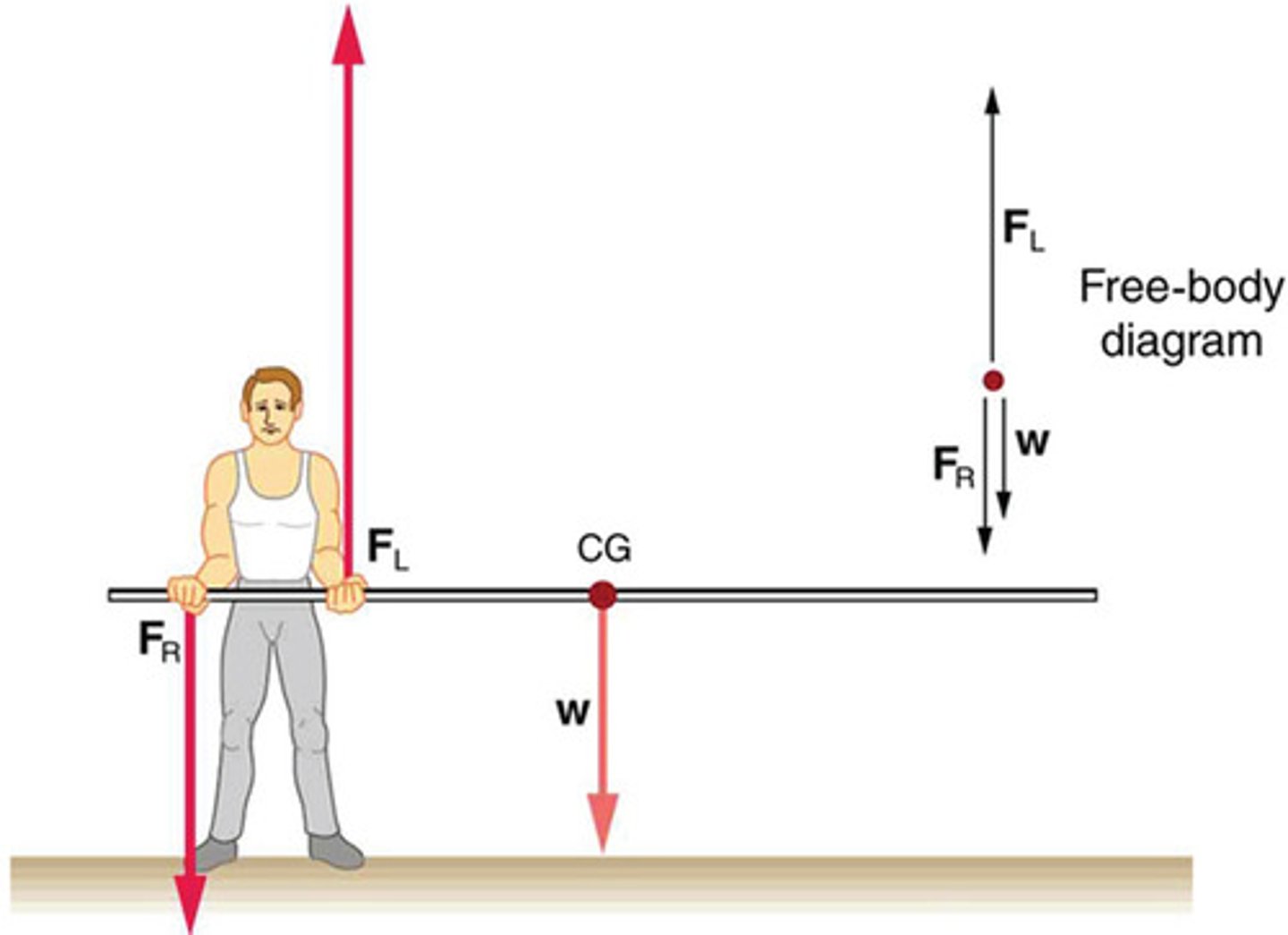
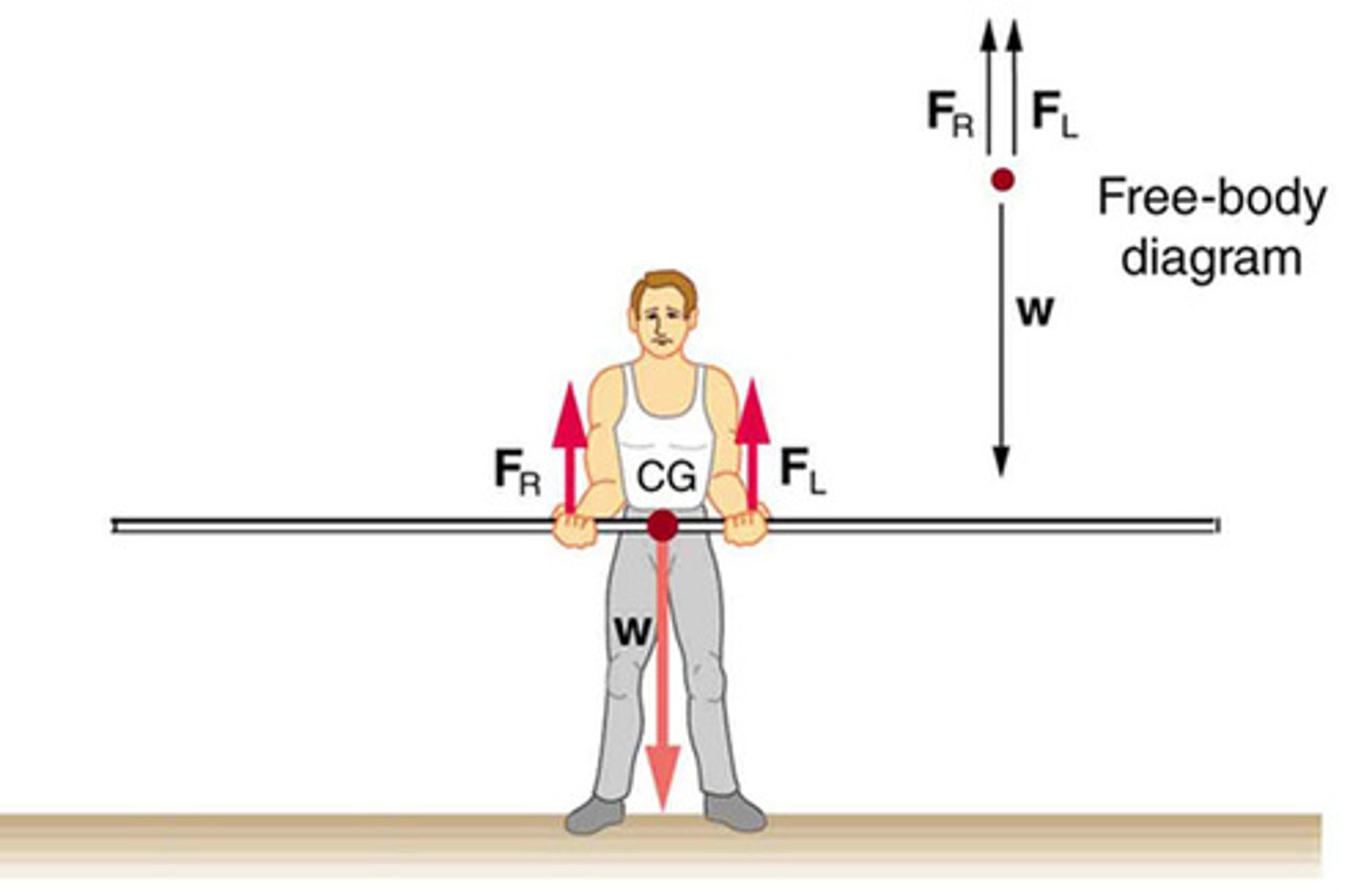
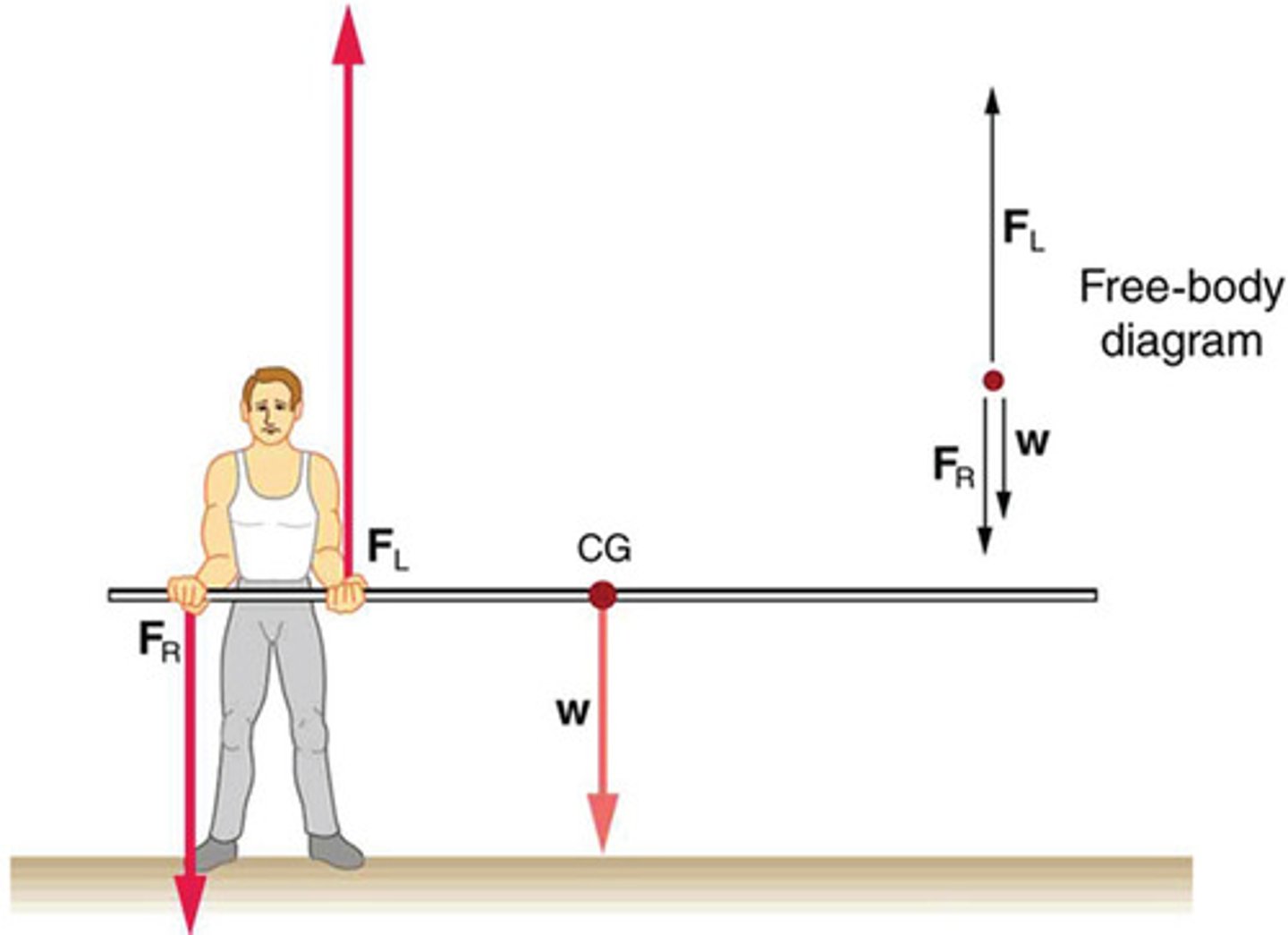
Free Body Diagram
A graphical representation used to visualize the forces acting on a system, showing their relative magnitudes, directions, and points of application.
Net Force (netF=0)
The sum of all forces acting on a system, which must be zero for the system to be in static equilibrium.
Net Torque (netτ=0)
The sum of all torques acting on a system, which must be zero for the system to be in static equilibrium.
Problem-Solving Strategy in Statics
A systematic approach involving determining static equilibrium, drawing free body diagrams, applying equilibrium conditions, and checking the solution's reasonableness.
Simple Machines
Devices that multiply or augment a force applied, often at the expense of the distance through which the force is applied. Examples include levers, gears, pulleys, wedges, and screws.
Mechanical Advantage (MA)
The ratio of output force to input force magnitudes for any simple machine, indicating how much a machine multiplies the input force.
Lever
A simple machine consisting of a rigid bar pivoted at a fixed point called the fulcrum, used to transmit and amplify force by rotation about the pivot.
Fulcrum
The fixed point around which a lever pivots.
Torque
A measure of the force that can cause an object to rotate about an axis. It is the product of force and the distance from the pivot point.
Inclined Plane
A flat surface tilted at an angle to help raise or lower loads with less effort than lifting them vertically.
Wheelbarrow
A type of lever where the load is between the pivot (wheel's axle) and the input force, providing a mechanical advantage greater than one.
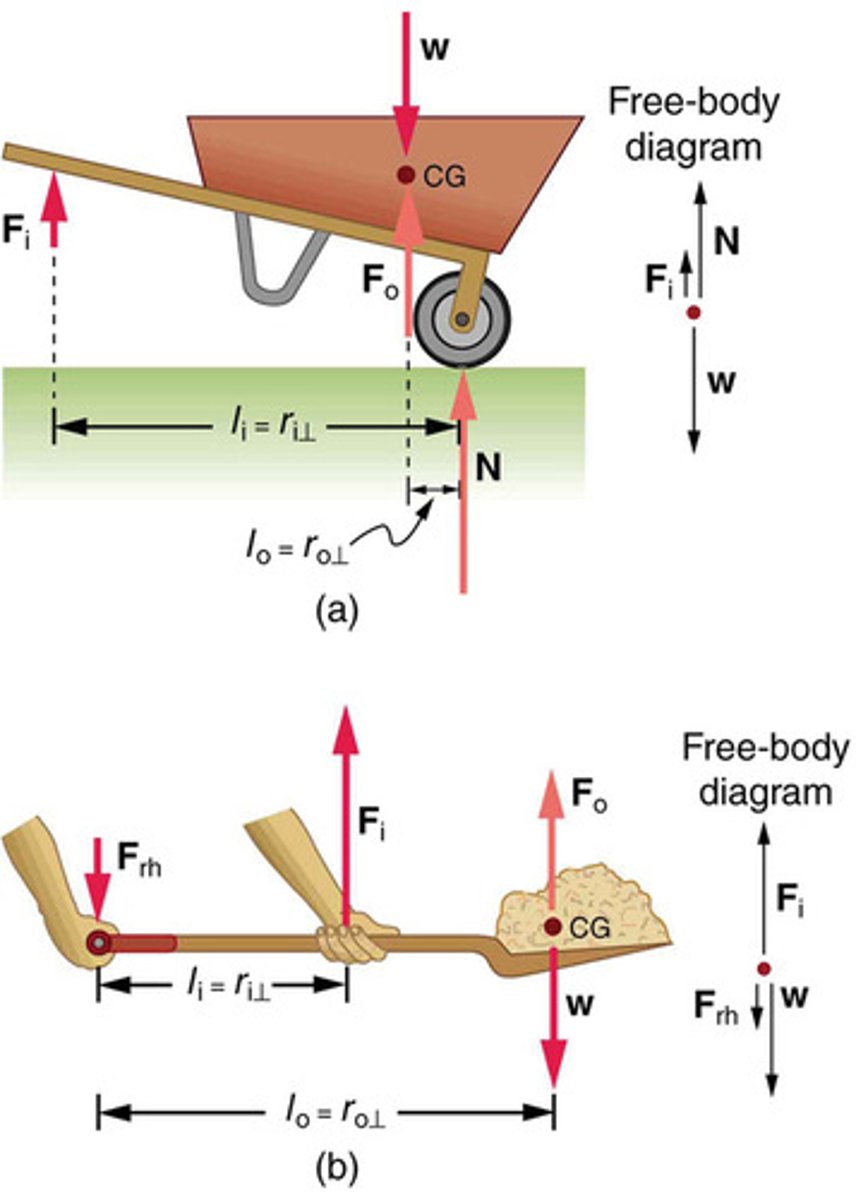
Shovel
A type of lever where the input force is between the pivot and the load, often resulting in a mechanical advantage less than one.
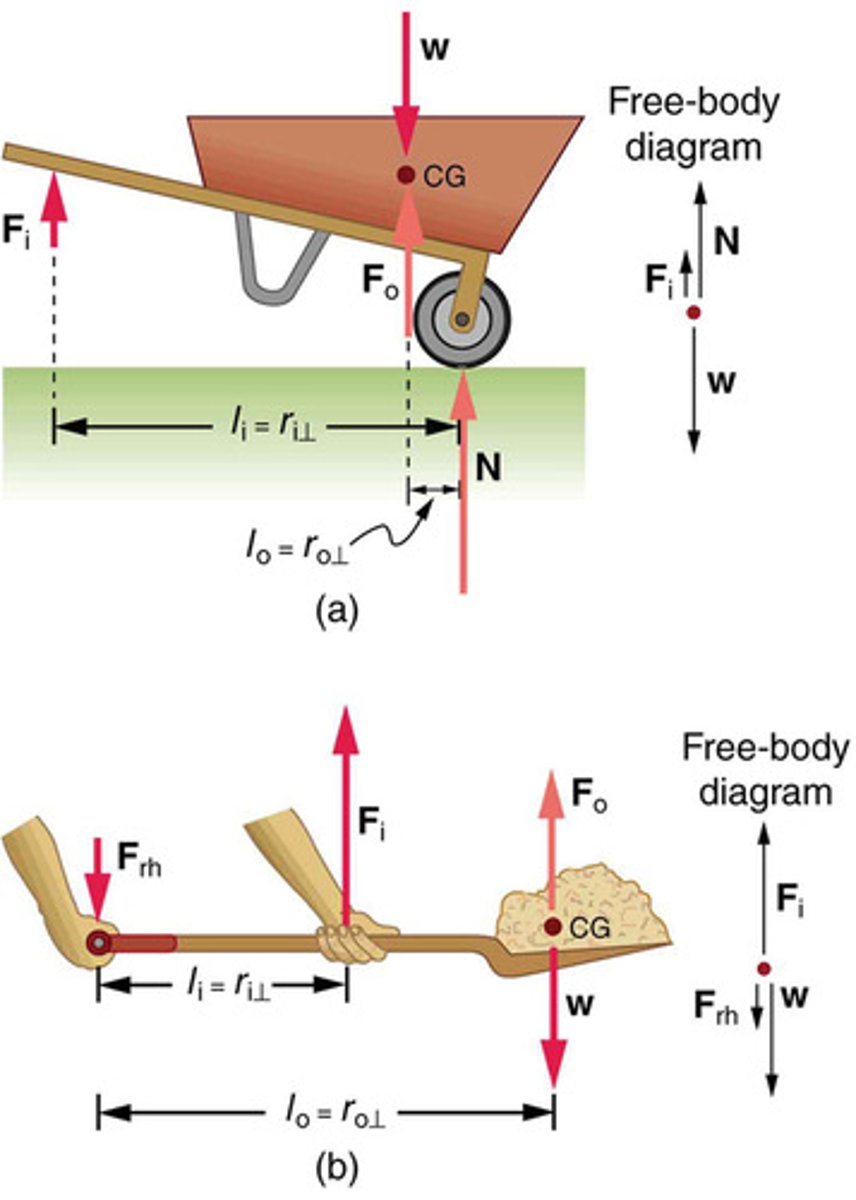
Equation for Mechanical Advantage of a Lever
MA = Fo/Fi = li/lo, where Fo is the output force, Fi is the input force, li is the input lever arm, and lo is the output lever arm.
Example of Mechanical Advantage Calculation
For a wheelbarrow with a load lever arm of 7.50 cm and a hand lever arm of 1.02 m, the MA is 1.02/0.0750 = 13.6.
Muscle Contraction
The process by which muscles exert force by shortening and generating tension.
Flexor Muscle
A muscle that decreases the angle between bones on two sides of a joint, such as the biceps in the arm.
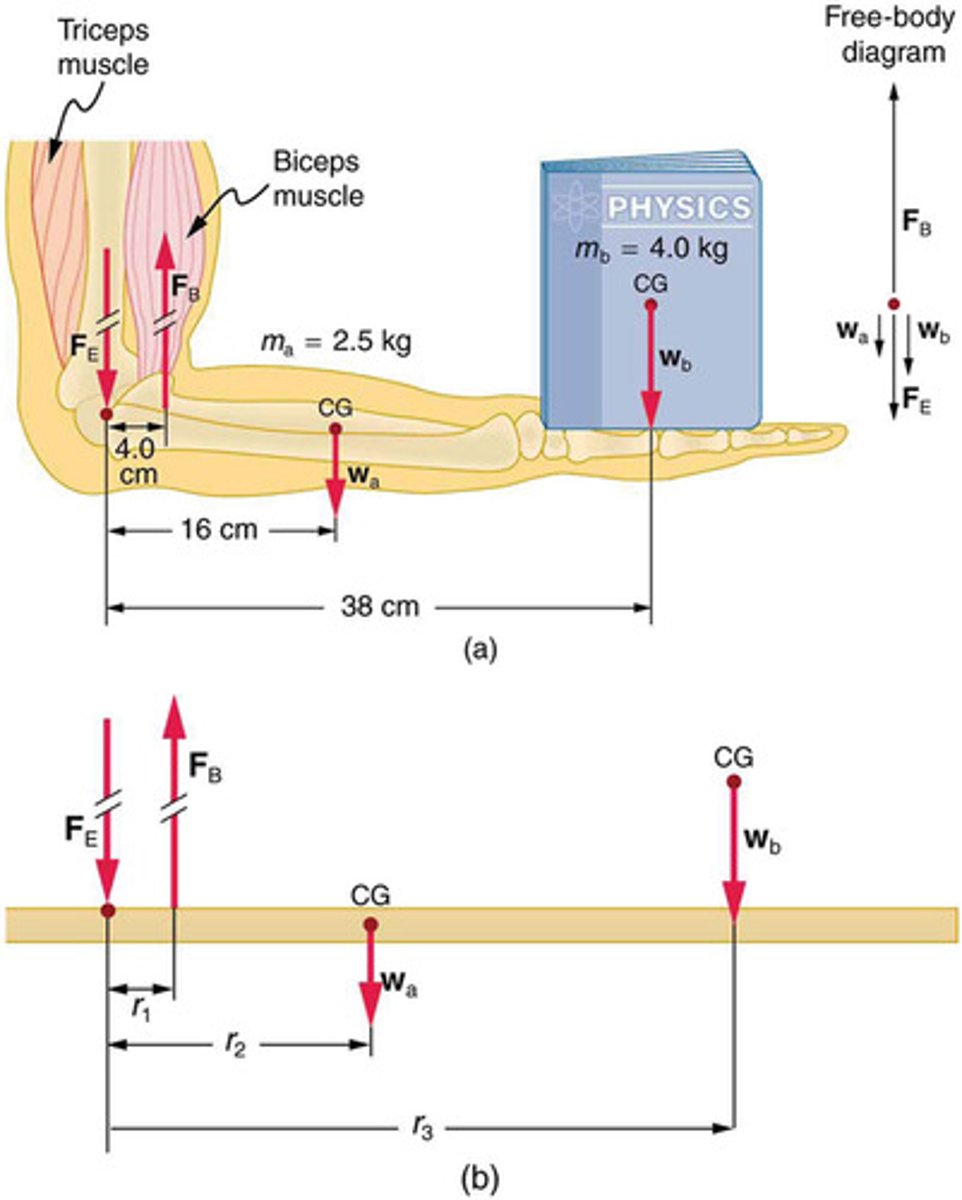
Extensor Muscle
A muscle that increases the angle between bones on two sides of a joint, such as the triceps in the arm.
Mechanical Advantage
The ratio of the output force to the input force in a system, often less than one in muscle systems.
Center of Gravity (CG)
The point where the total weight of a body or system is considered to be concentrated.
Force Exerted by Muscles
The tension generated by muscles during contraction, often much greater than the force applied externally.
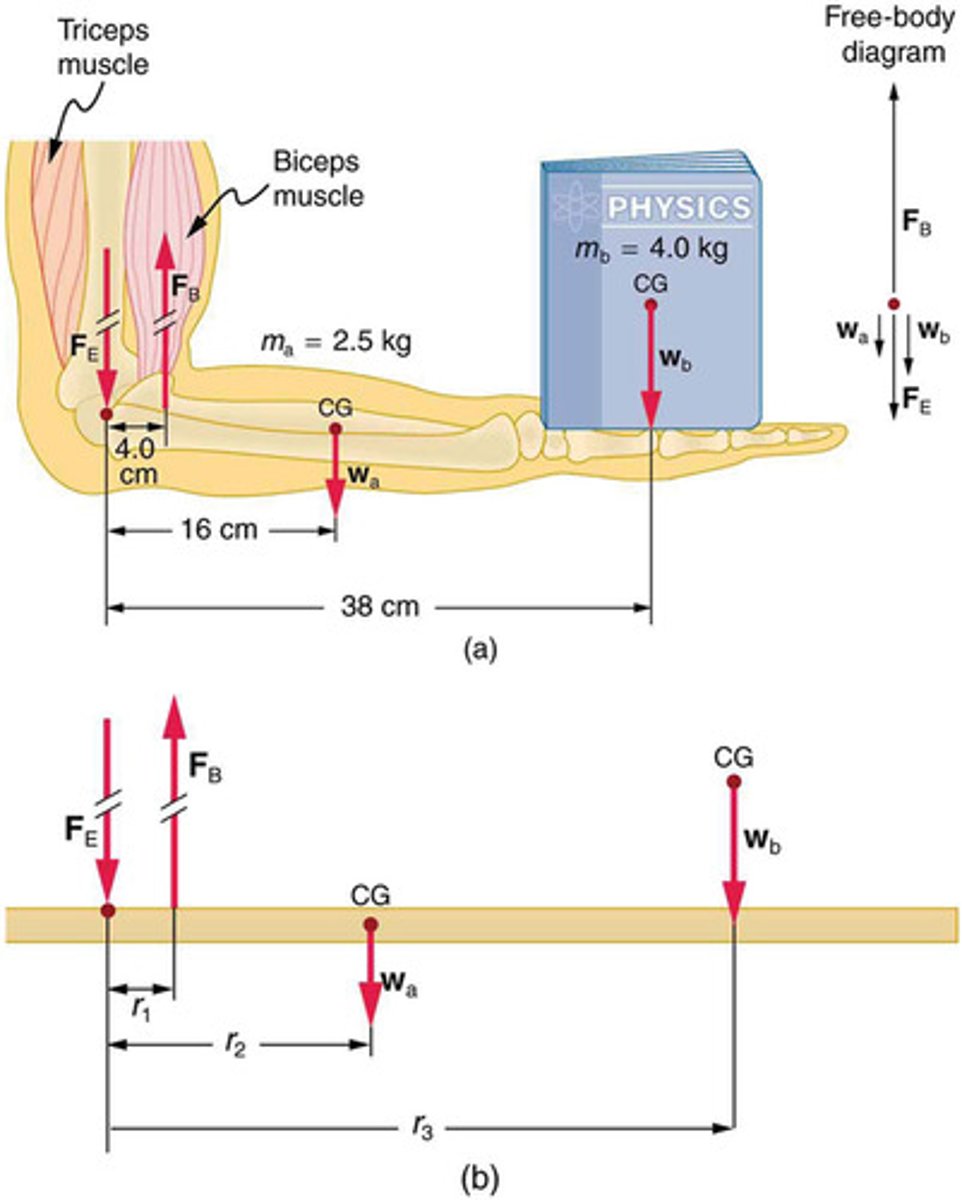
Pivot Point
The point around which rotation occurs in a lever system, such as a joint in the body.
Mechanical Advantage in Jaw
The masseter muscles in the jaw have a mechanical advantage greater than one, allowing large forces to be exerted with the back teeth.