Robotics Kinematics
1/22
Earn XP
Description and Tags
Definitions for robotics kinematics and example of robotic arms
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No study sessions yet.
23 Terms
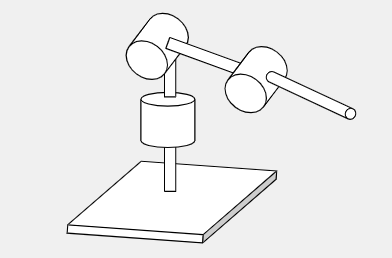
Anthropomorphic Robot Arm (RRR)
Spherical Workspace
Used for dexterous activities, i.e., welding or spray painting
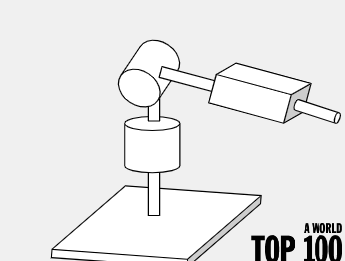
Spherical Robot Arm (RRT)
Spherical Workspace
Used for simple tasks that don’t require complex motion
Trades heavy loads for higher accuracy
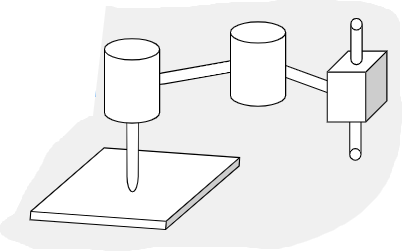
SCARA (Selective Compliant Articulated Robot for Assembly) (RRT)
Cylindrical Workspace
Used for factory assembly in single planes
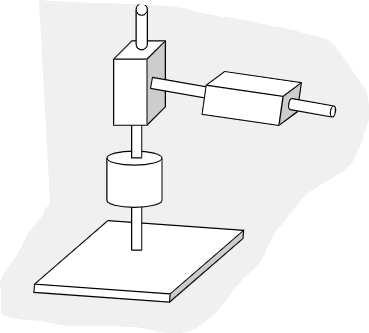
Cylindrical Robot Arm (RTT)
Cylindrical Workspace
Used for basic jobs
Cartesian Robot Arm (TTT)
Prism Workspace
Known for high accuracy with less capacity for high loads
Kinematics Definition
The study of motion without considering the forces and moments which are responsible for the motion.
The motion is described by trajectories, velocities and accelerations - in robotics the main interest is in trajectories and velocities.
Forward/Direct Kinematics
Given joint variables calculated the pose of end-effector
Forward/Direct Kinematics Additional Information
The solution is unique
Represents the simpler problemI
Inverse Kinematics
Given the pose of the end-effector calculate joint variables
Inverse Kinematics Additional Information
The equations are generally nonlinear
No closed form solution
No / Multiple / Infinite solutions may exist
Differential/Instantaneous Kinematics
Given joint velocities determine the end-effector linear and angular velocities
Inverse Differential Kinematics
Given end-effector velocities determine the joint velocities
Reachable Workspace
Set of points that can be reached by end-effector
Dexterous Workspace
Set of points that can be reached by end-effector with arbitrary orientation
Mechanical Structure of Robot Manipulator
Consists of a sequence of rigid bodies (links) interconnected by means of articulations (joints)
Characterisation of Robot Manipulator
An arm that ensures mobility, a wrist that grants dexterity, and an end-effector (gripper) that performs the task required
Task of Manipulator
Place an object grasped by the gripper to an arbitrary position and orientation in 3D
Path
Locusts of points required for travel of the manipulator
Trajectory
The path plus the timings involved for those point
Kinematic Redundancy
Number of DOF > number of variables needed to describe task
Can be obvious (7 DOF) or less obvious (task makes it redundant)
Adds dexterity and versatility
Accuracy
Actual and computed kinematics not the same
Varies across the workspace
Error typically <1mm
Repeatability
Ability to return to same position
Depends on mechanical structure, sensors and controllers
Difference typically < 0.1mm
Singularities
Arise when Jacobian is rank deficient as the inverse is ill defined
Close to singular configurations small velocities in end-effector may cause large joint velocities
There may be infintie solutions to inverse kinematics, configurations where mobility is reduced