Applied Linear algebra
1/95
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
96 Terms
Row Operations
The 3 elementary row operations:
Swap two rows.
Multiply a row by a nonzero scalar (e.g., divide a row by 3).
Add or subtract a multiple of one row to/from another.
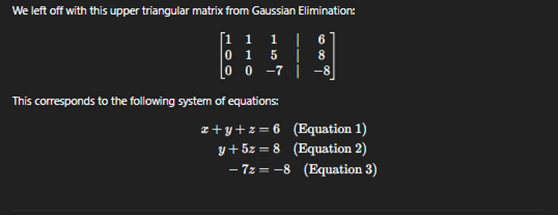
Gaussian Elimination
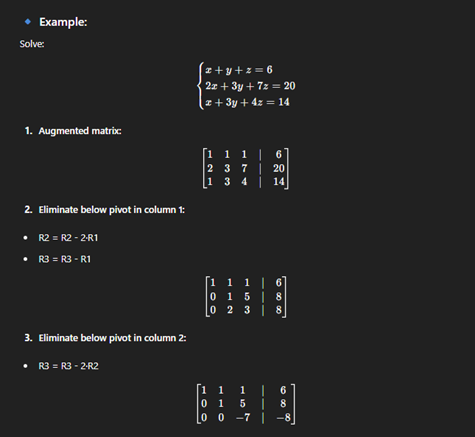
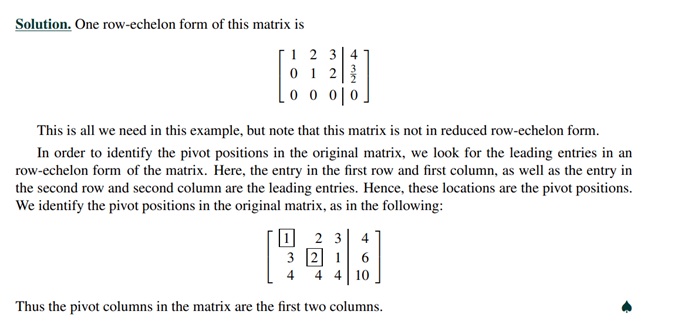
Pivot Column
Pivot – first none zero in a row of matrix
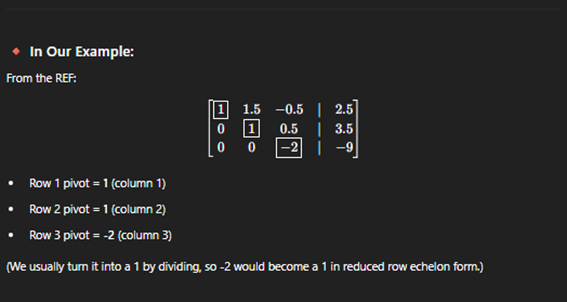
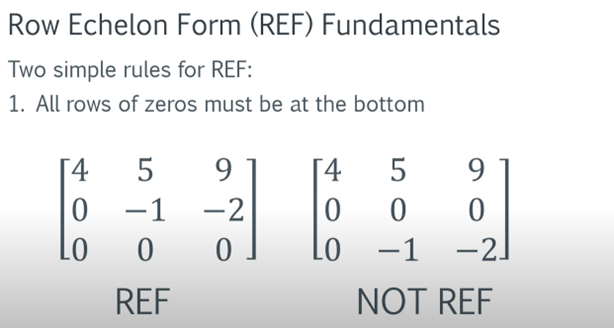
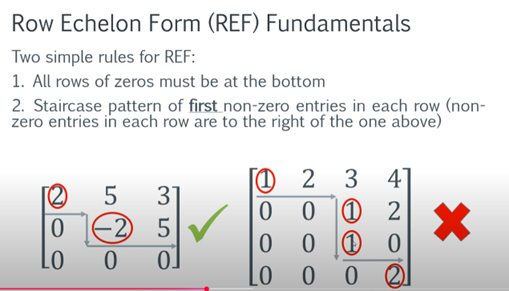
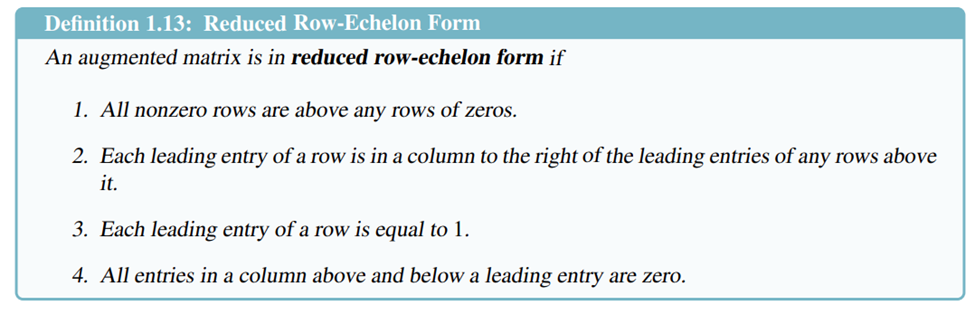
Row enchelon form
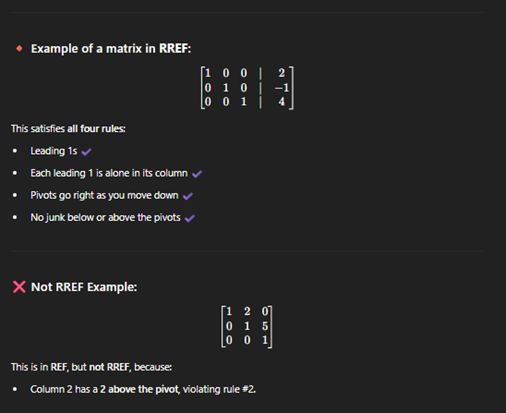
Row reduced enchelon form
Basically the difference between this and other, is the leading entry 1 has to be the only none zero in its columnt.first none zero in each row has to be 1
Pivot position and pivot column (Has to be be in row encholen form)

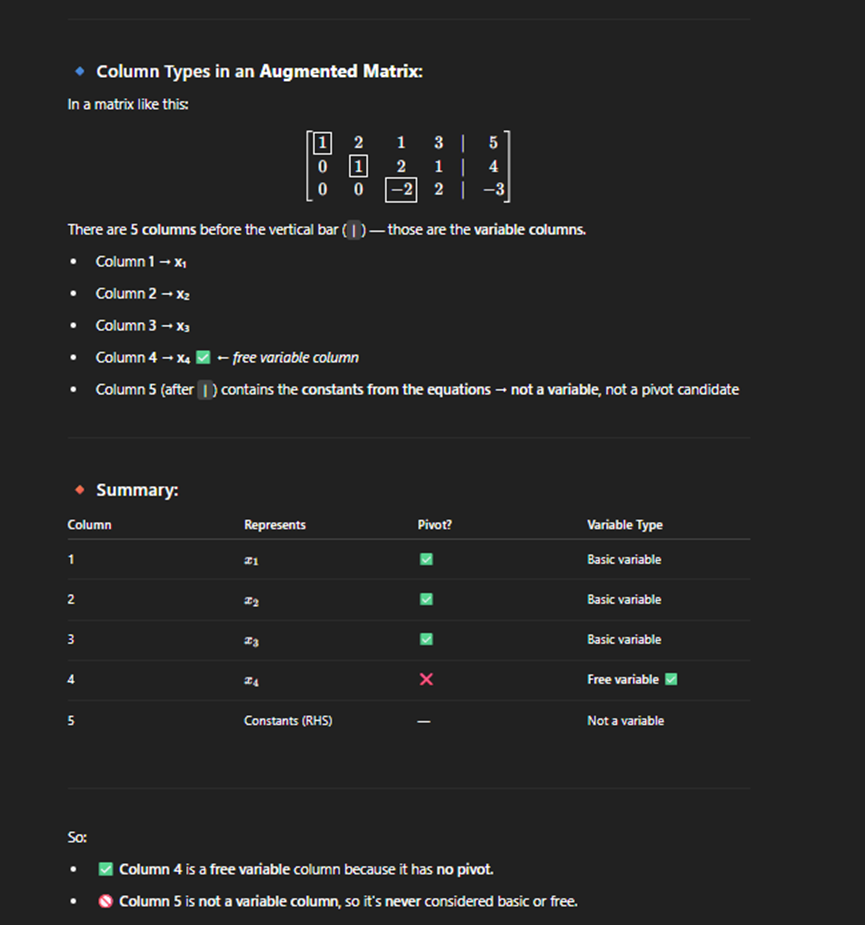
Basic and free variables
Basic variable – if it corresponds to a pivot column
Free variable - if does Not correspond to a pivot column
Consisent system
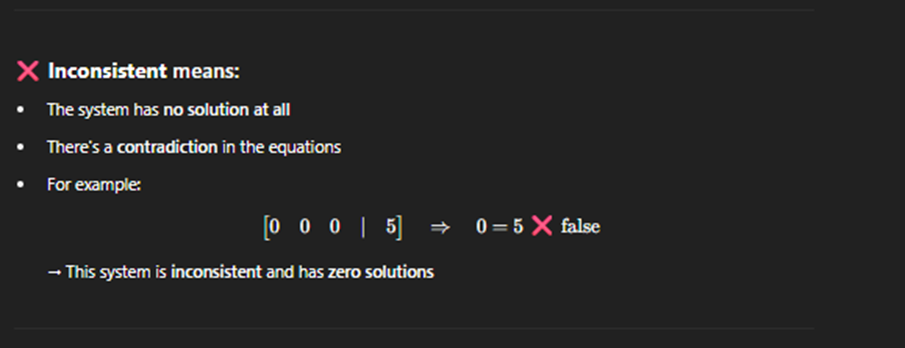
· A consistent matrix is an augmented matrix that represents a system of equations with at least one solution.
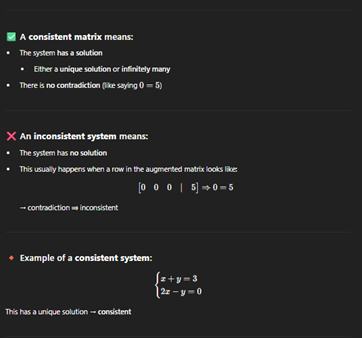
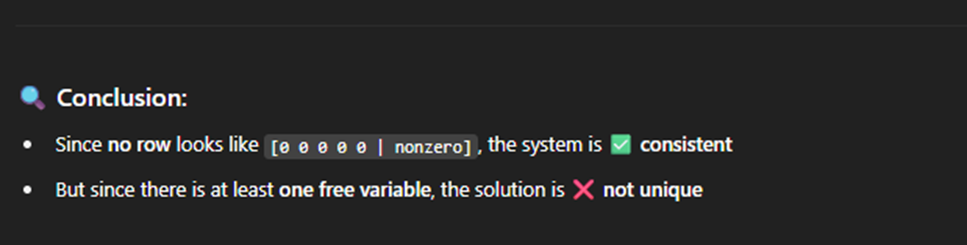
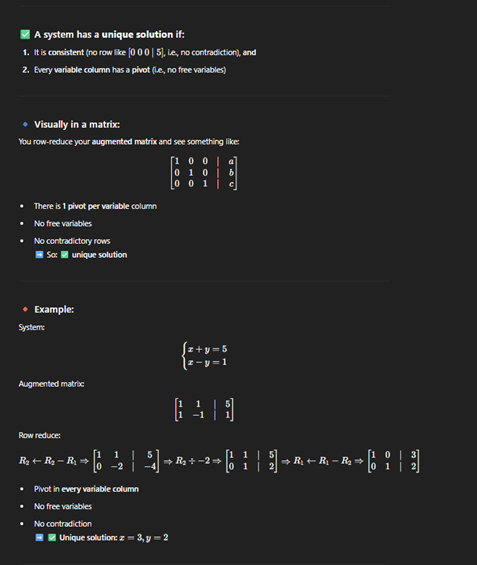
· Unique no Free variables, no contradictions
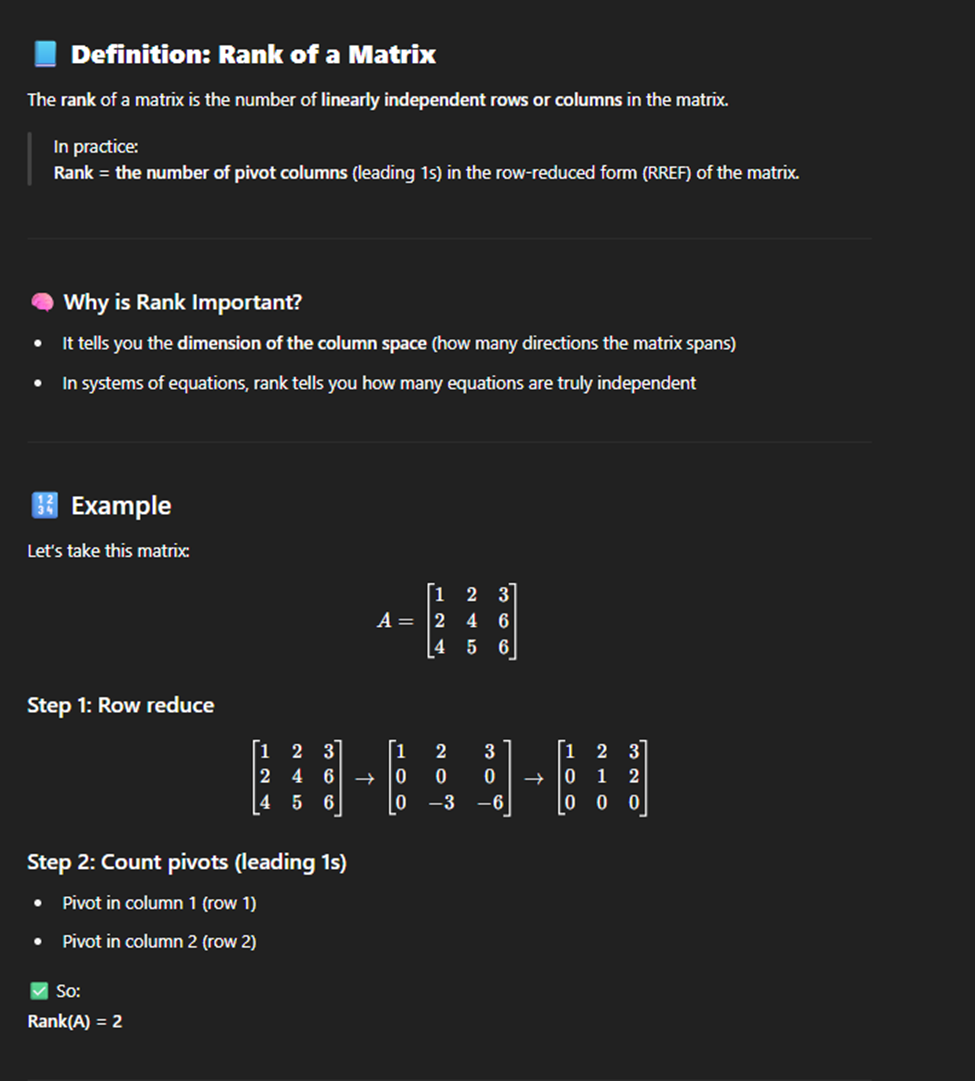
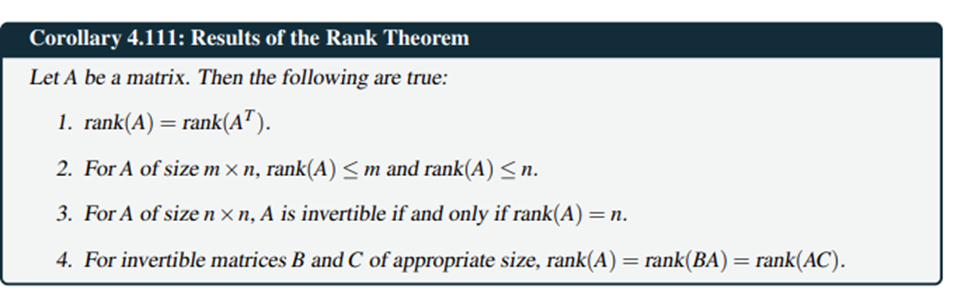
Rank
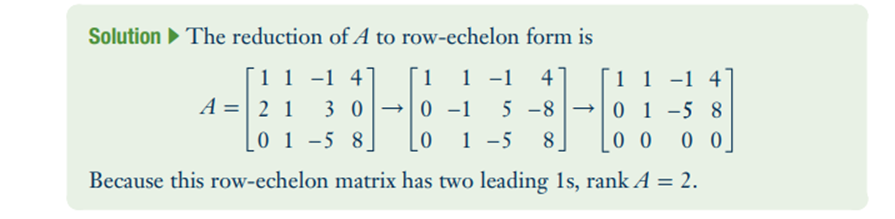
The number of pivot columns (i.e., the number of leading 1s) in its row echelon form
Homogeneous Equations
where all constant are 0.
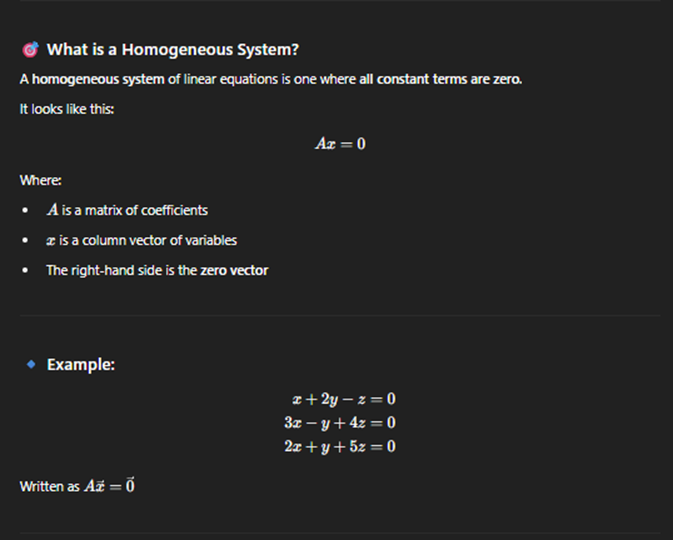
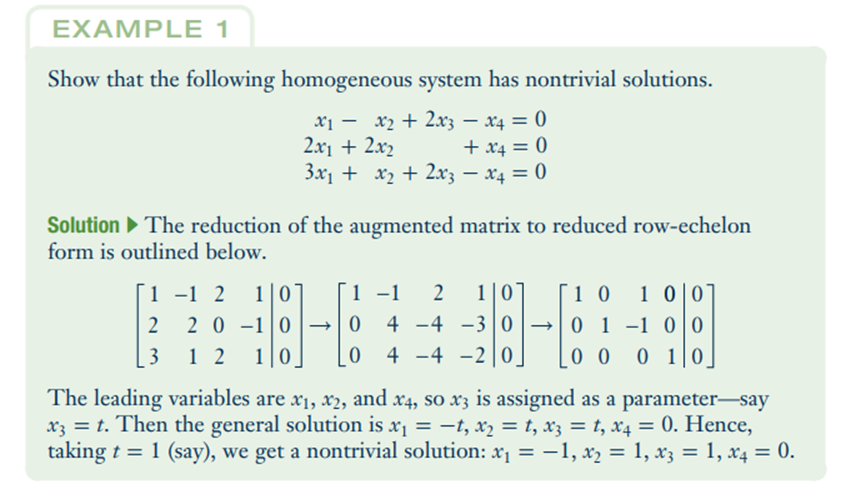
Homogeneous has at least one solution.
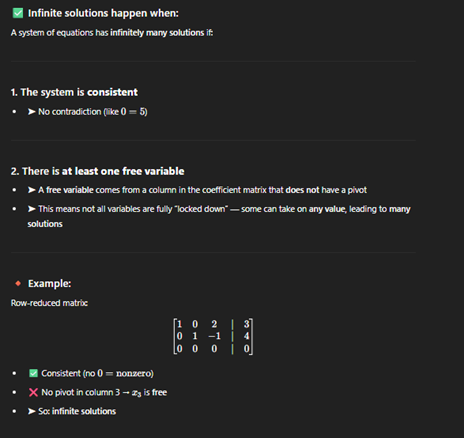
If rank <n, then there are infinite solutions.
If rank =n, then the only solution is the trivial one.
(n is the number of columns)
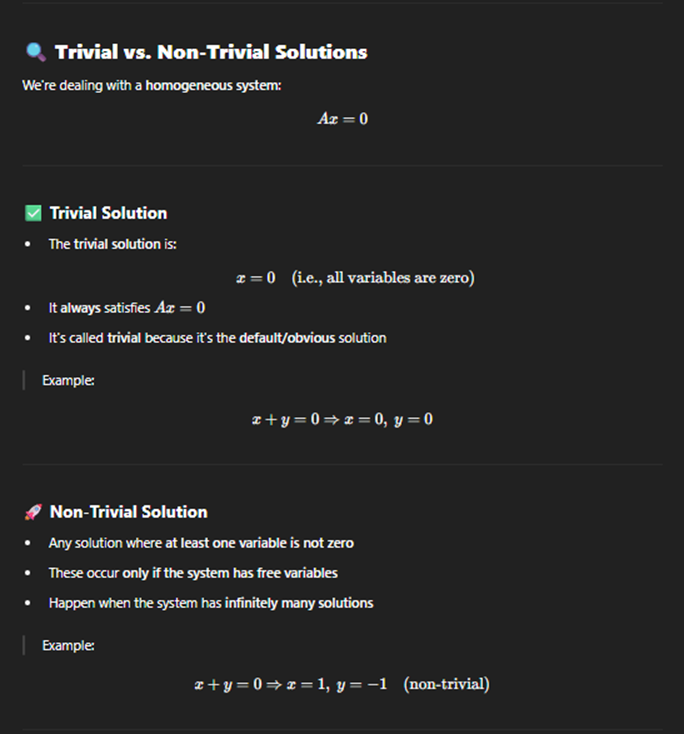
Trivial vs non trivial
Trivial if everything is 0.
Non trivial not 0.
Non trivial if there are any free variables
Linear Combinations and Basic Solutions
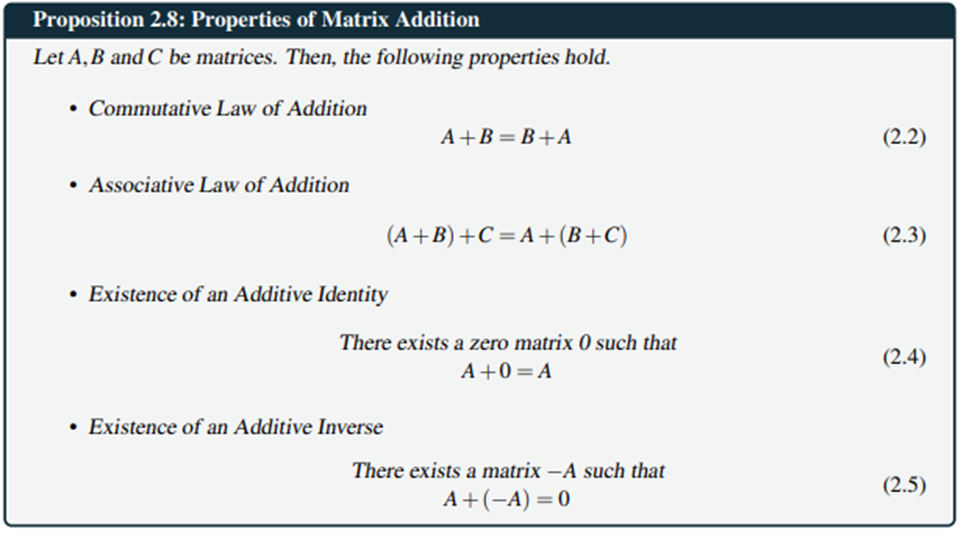
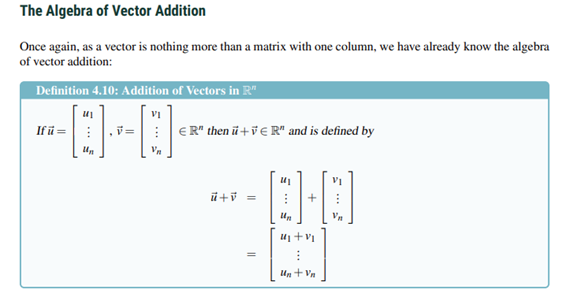
Matrix Addition
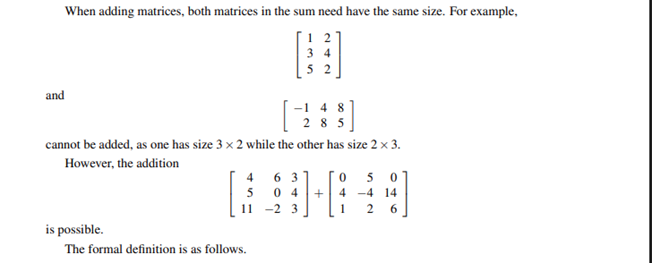
Has to be same size to add and minus
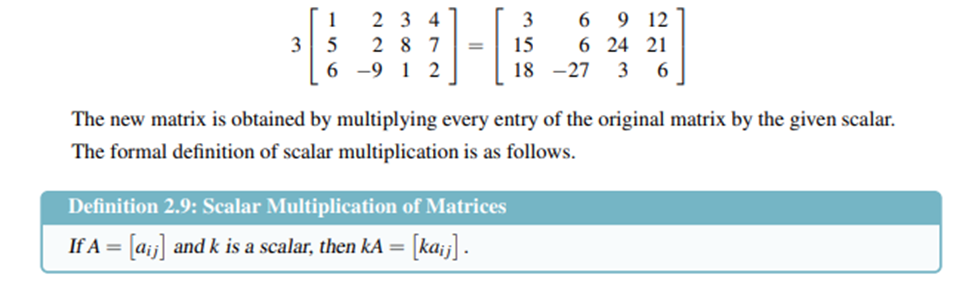
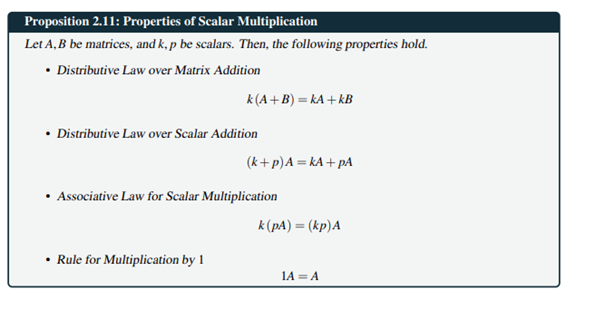
Scalar multiplication matrices
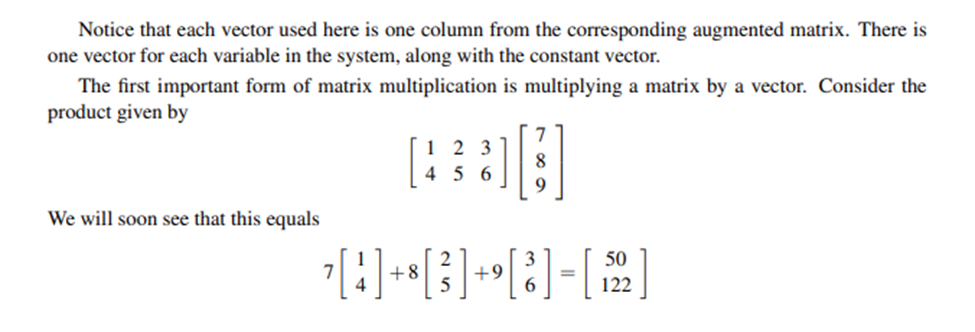
Vector Matrix Multiplication
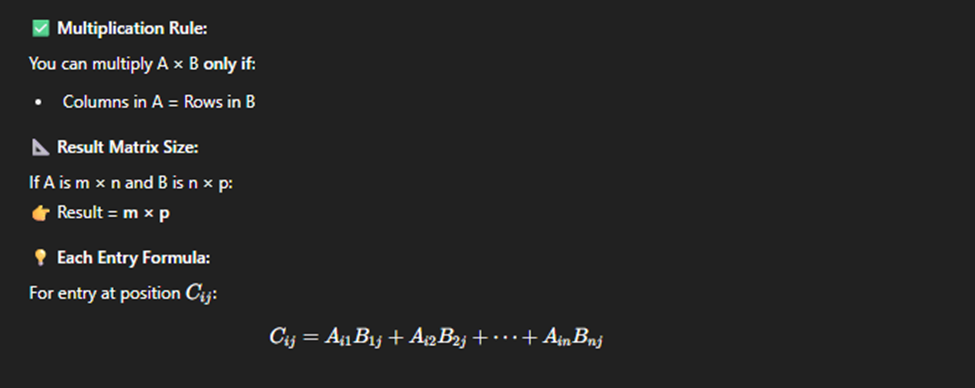
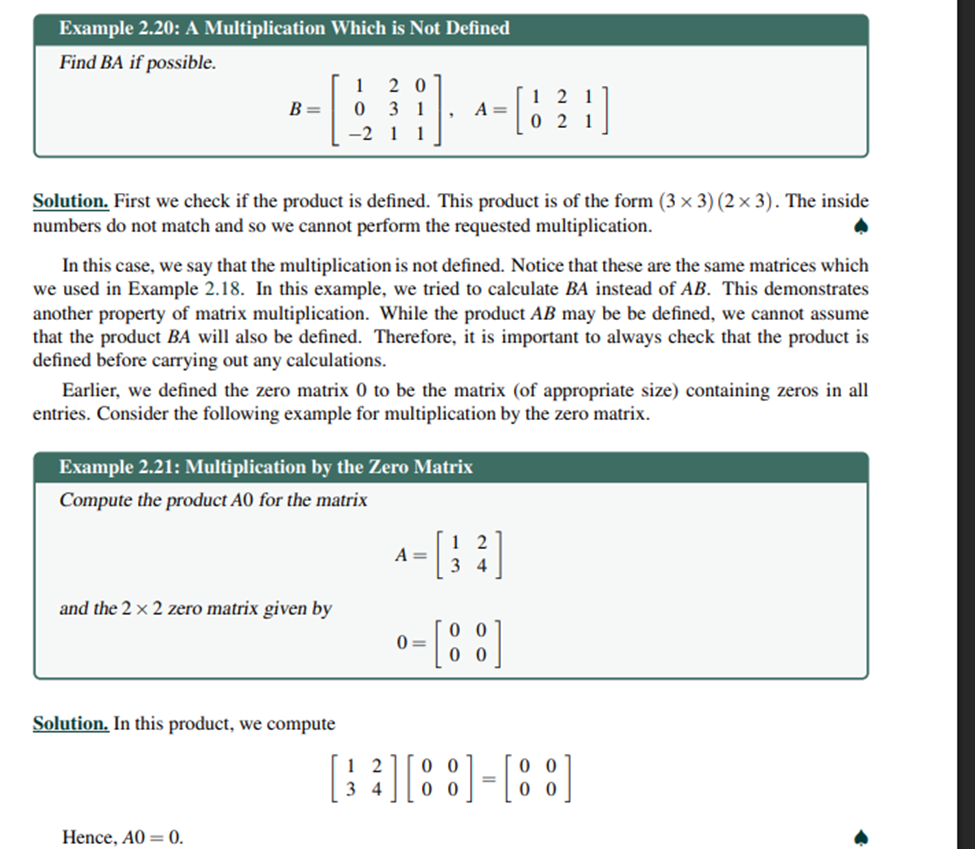
Multiplying matrices
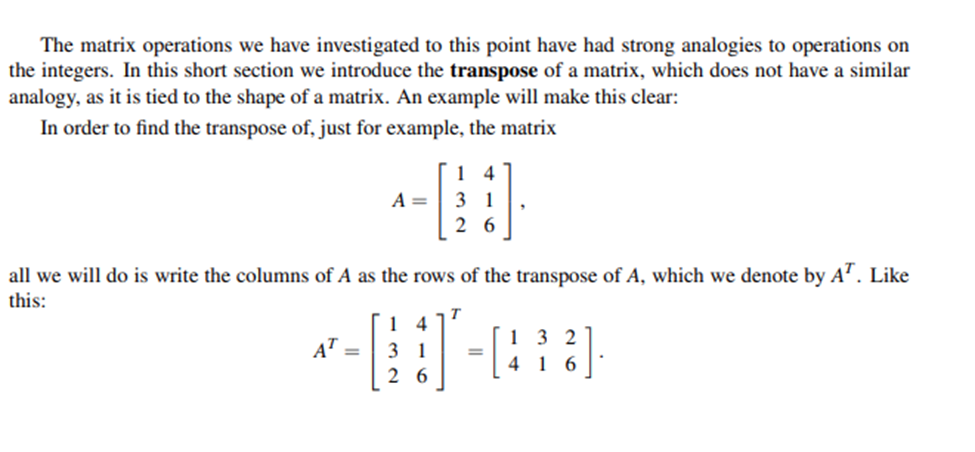
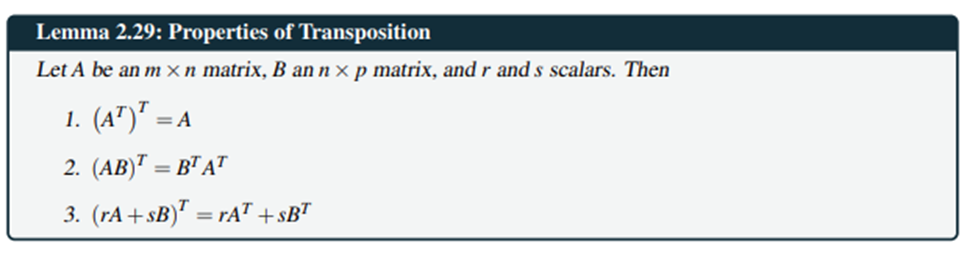
Transpose
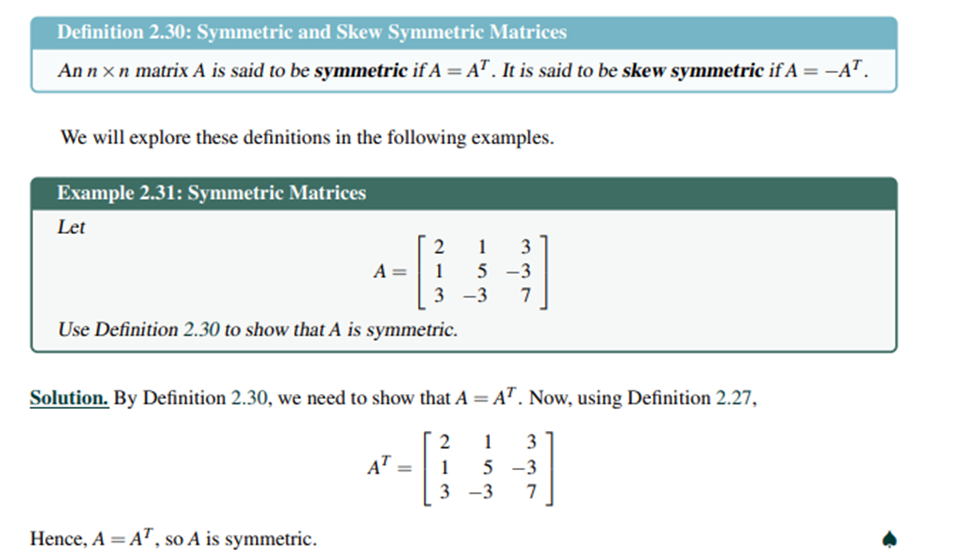
Symmetric and skew symmetric
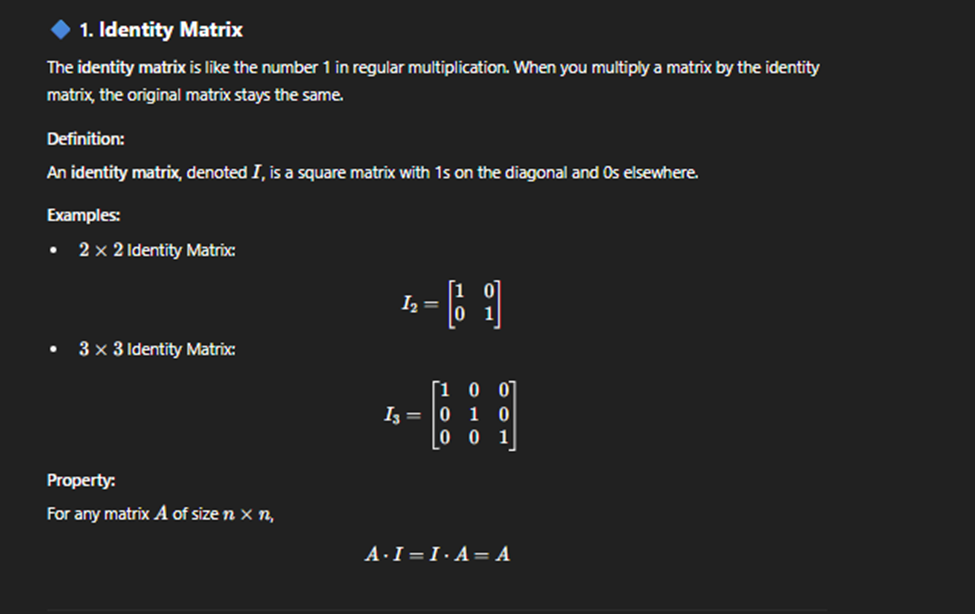
Identity matrix
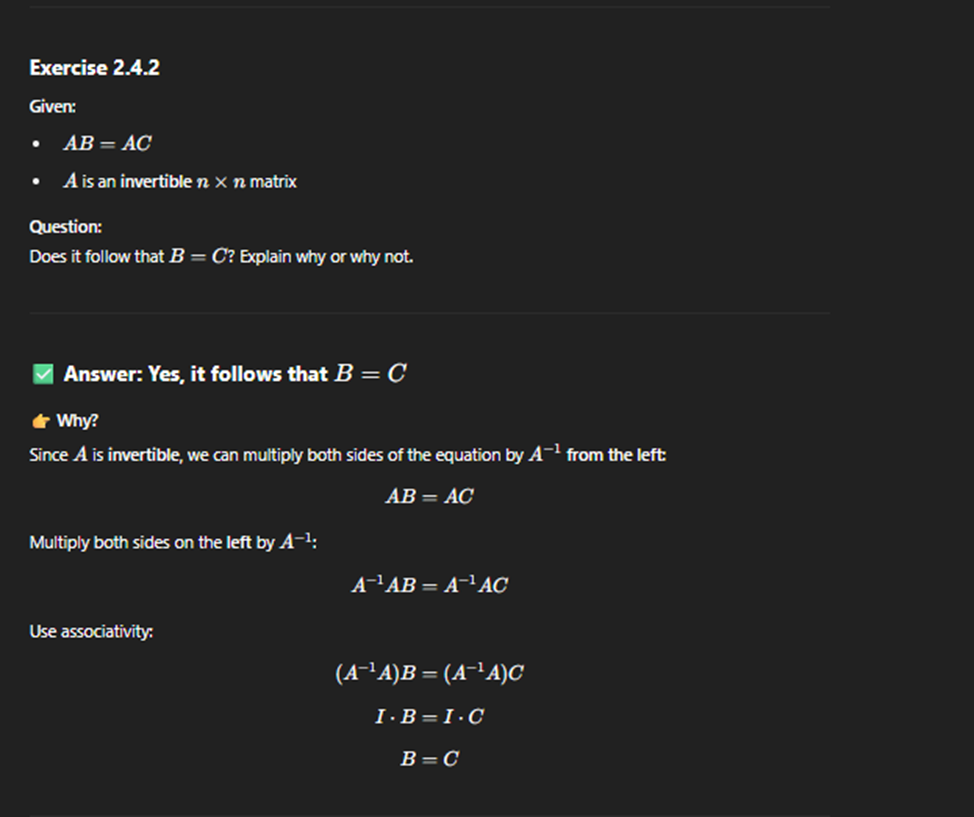
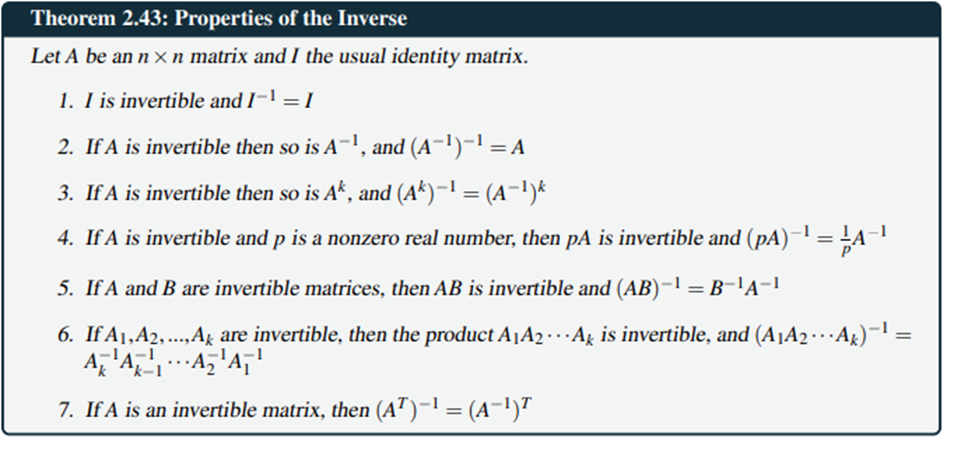
Invertible matrix
Invertible matrices are basically matrices that have an inverse

Finding inverse of a matrix
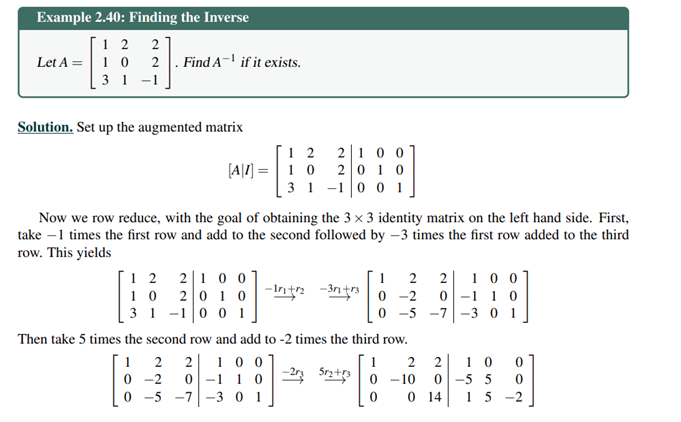
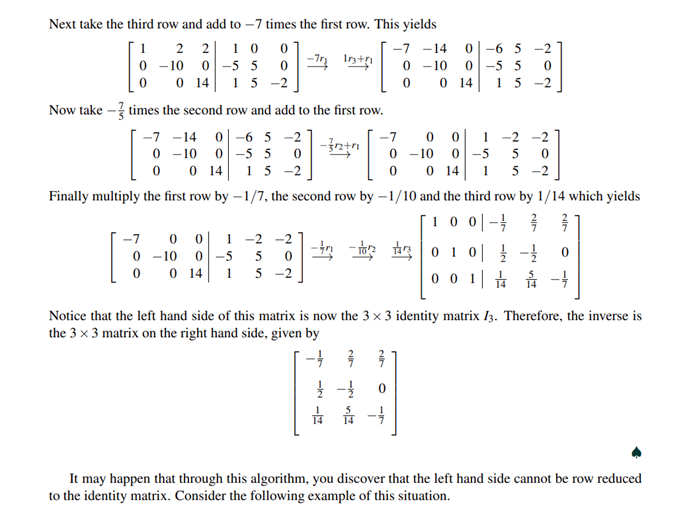
A matrix with no inverse cannot get to this form (has to be reduced row enncholon form)
Solving linear system with matrices
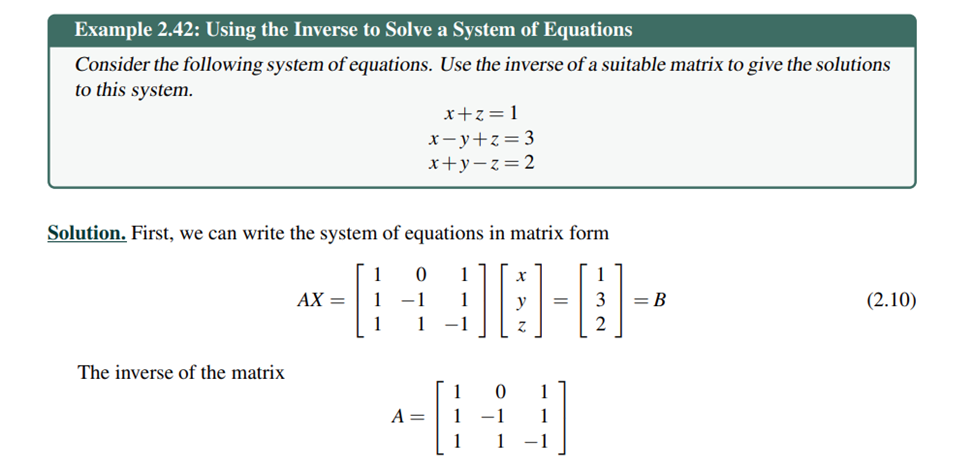
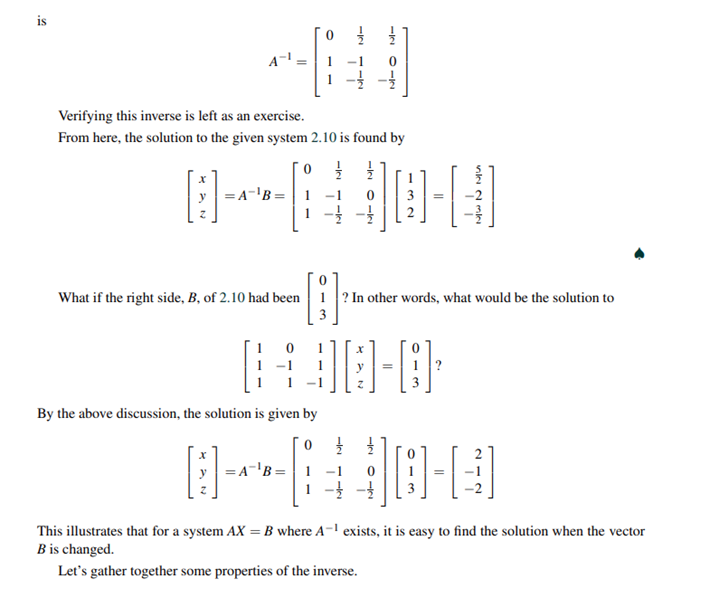
Ax = B
(A^-1)Ax = (A^-1)B
x = (A^-1)B
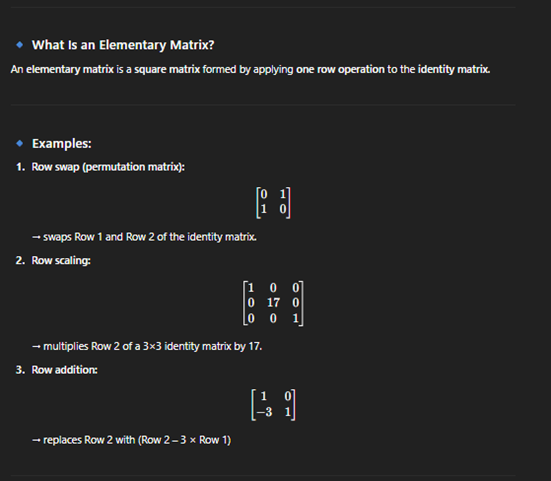
Elementary matrices
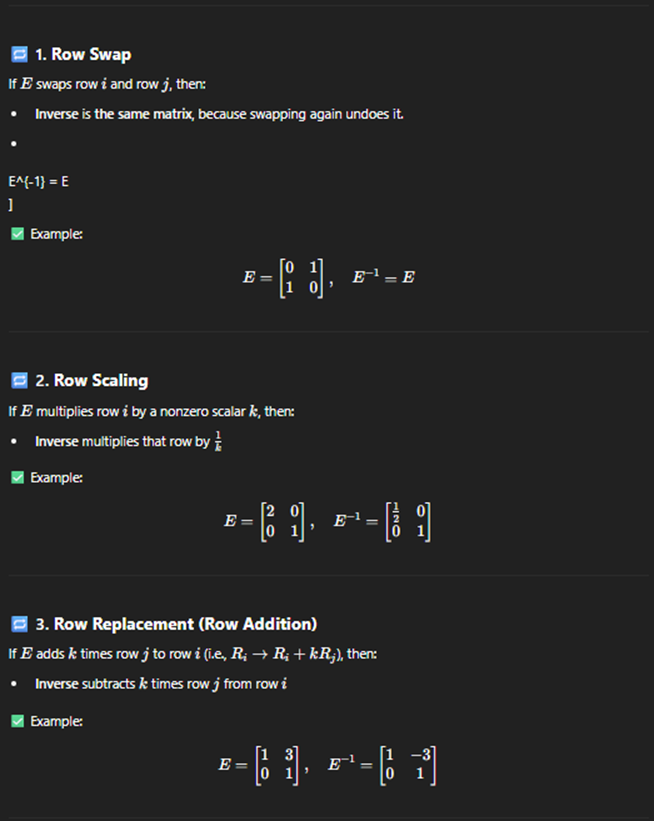
Inverse of elementary matrices
· Every elementary matrices is invertible
· An elementary matrix represents a single row operation done to an identity matrix. Its inverse is simply the matrix that undoes that operation.
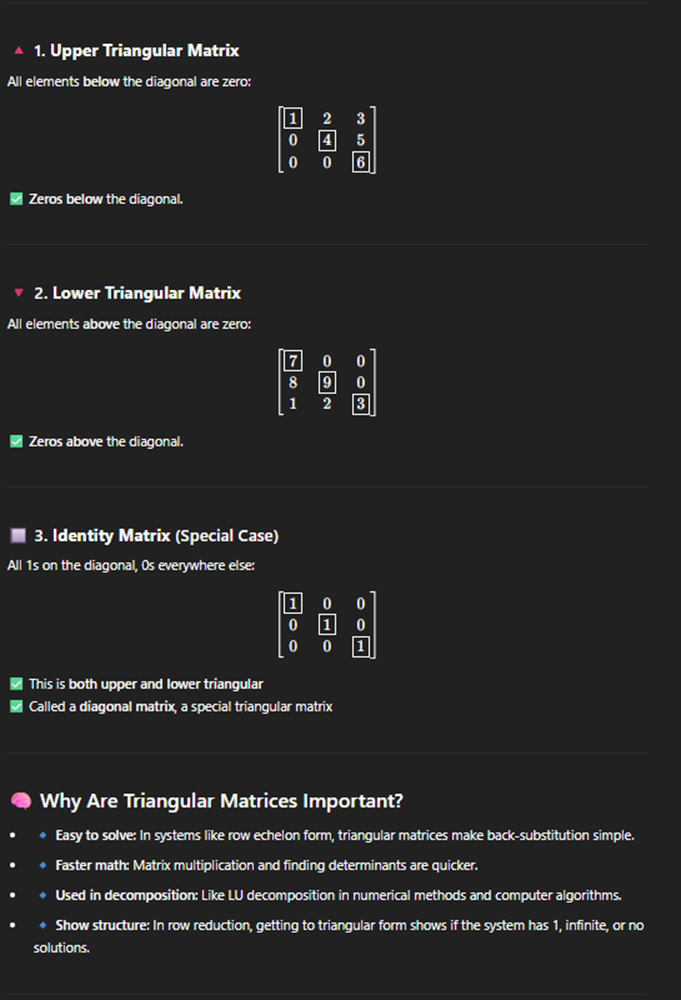
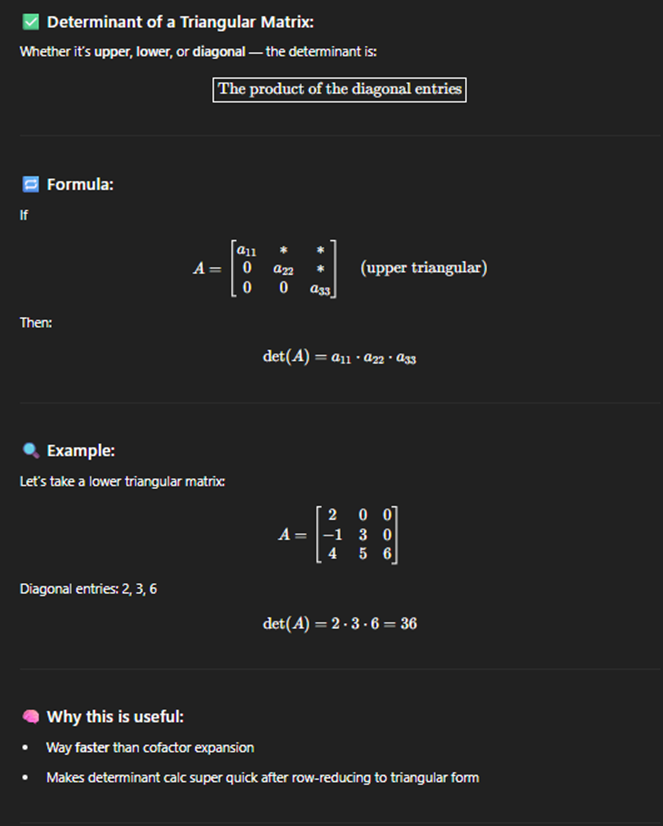
Triangular matrices
· A triangular matrix is a square matrix (same number of rows and columns) where all entries on one side of the main diagonal are zero.
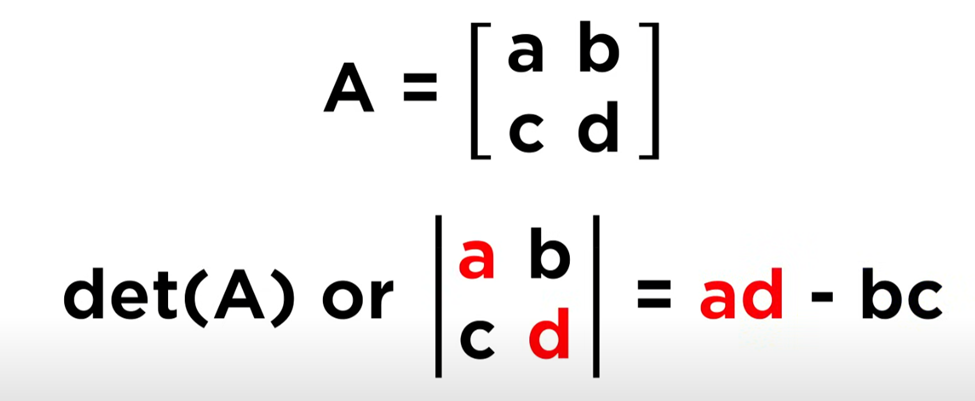
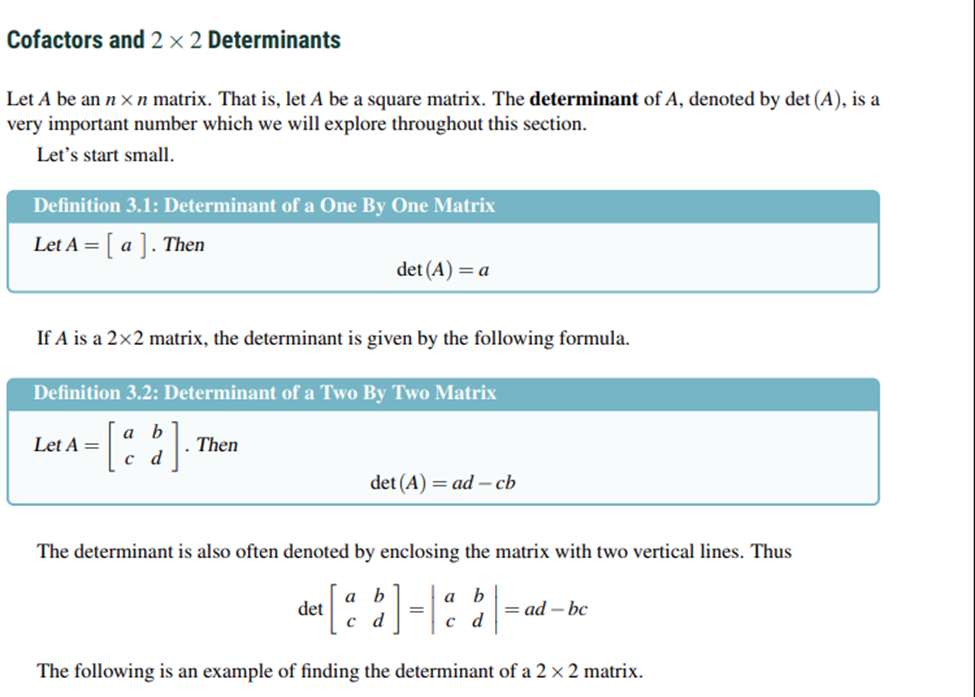
Determinant
single number calulated from a square matrix (2×2)(3×3)(….)
Matrix minros
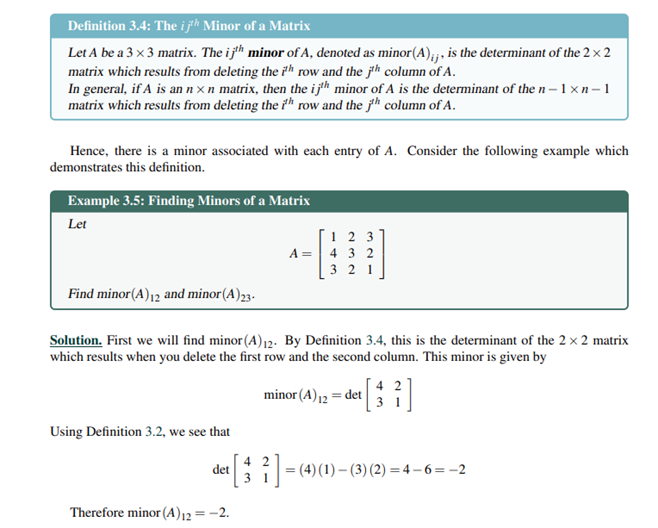
· Basically doing the determinate at that point we are looking at for minors
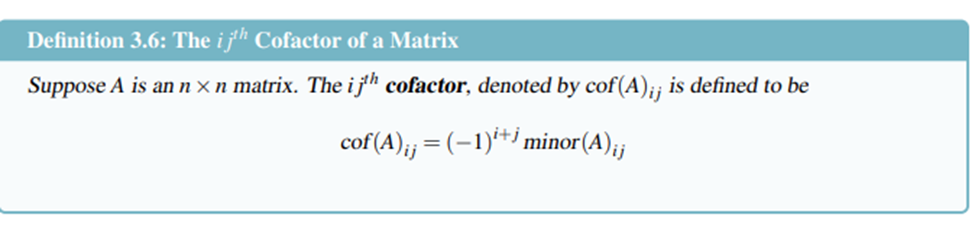
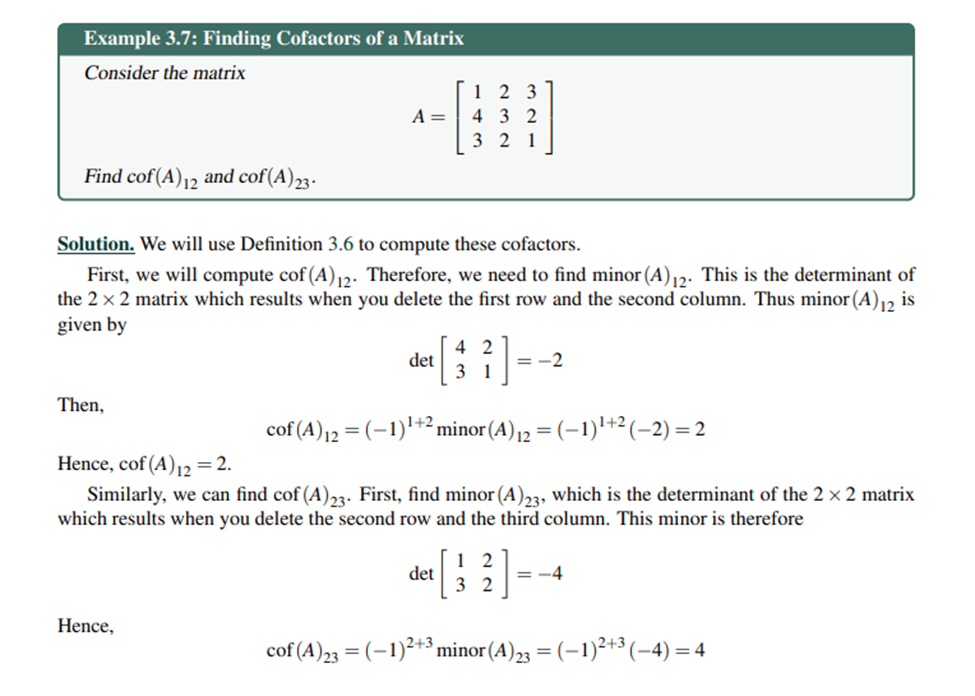
Cofactors
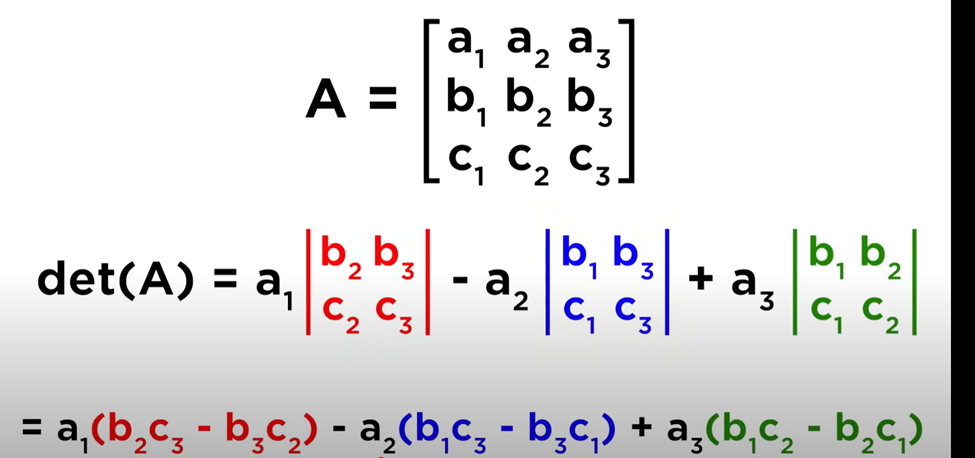
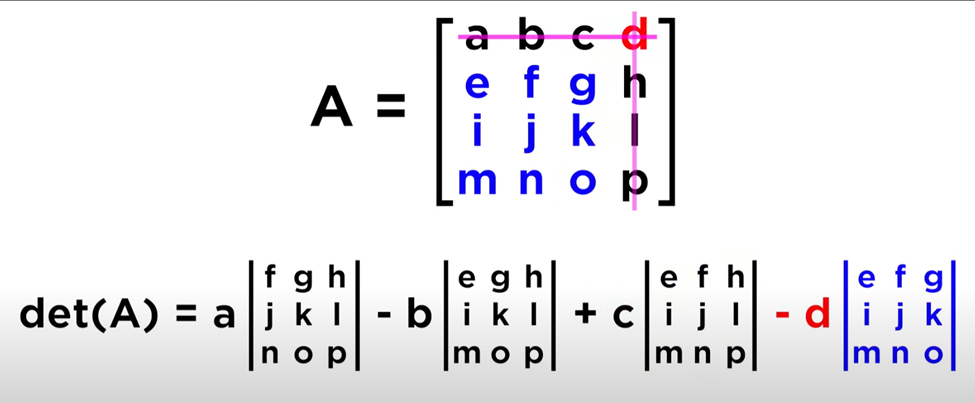
Determinant cofactor expansion
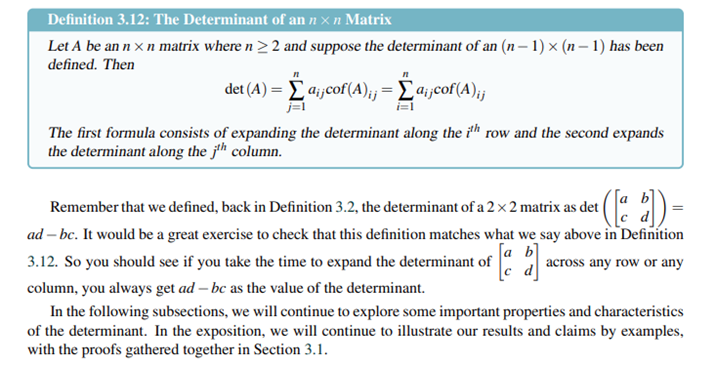
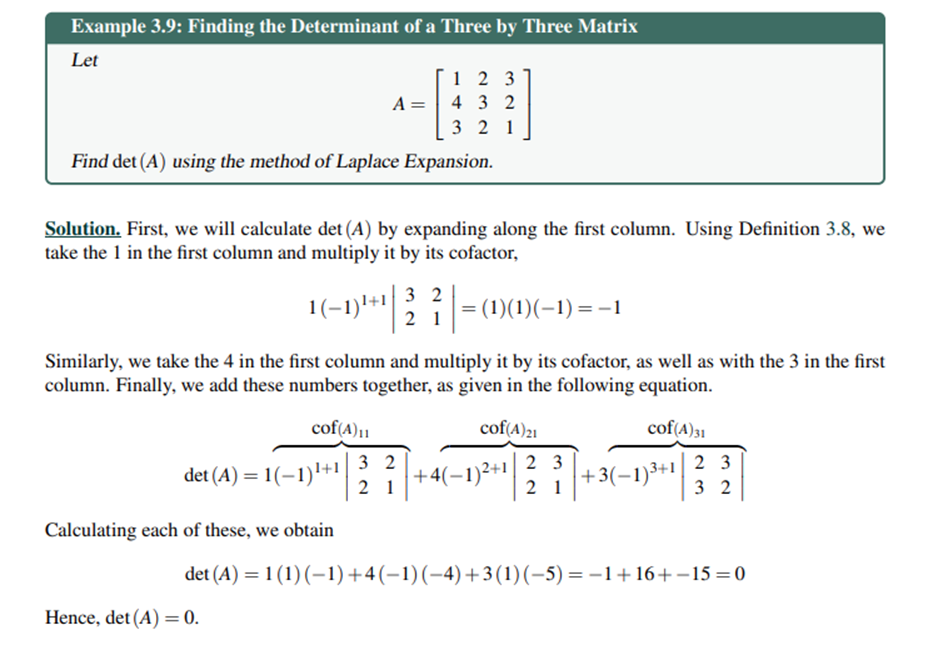
(can choose a row or column)
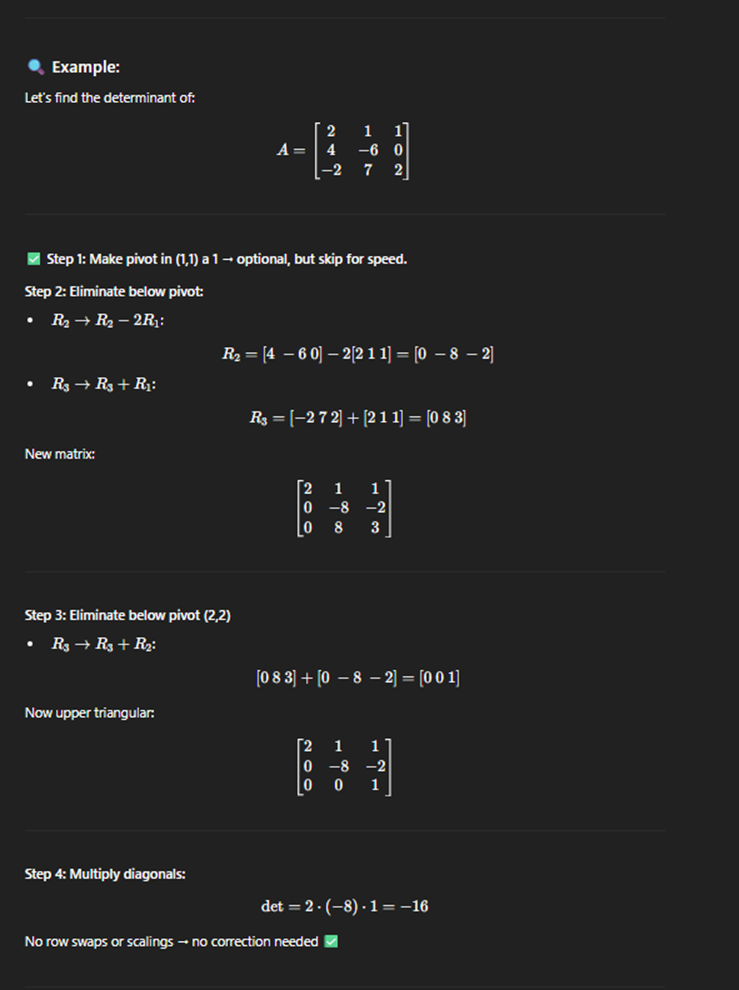
Determinant triangular matrix
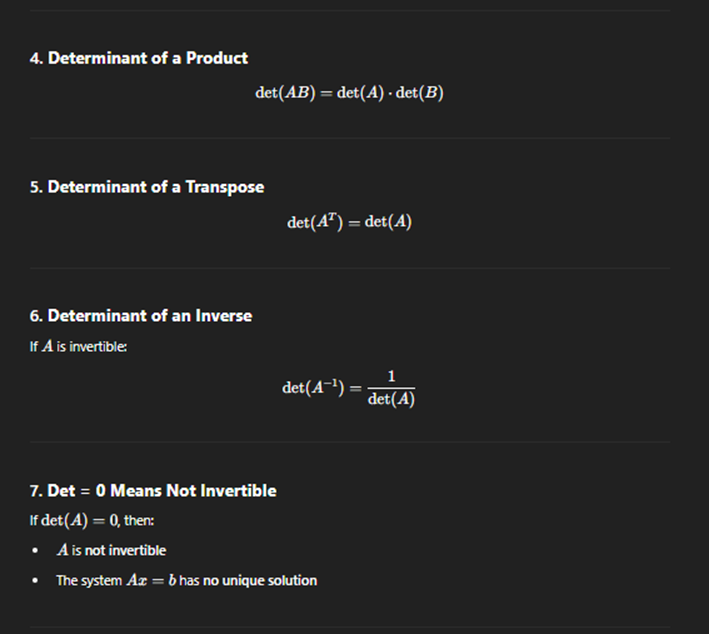
Properties of determinants



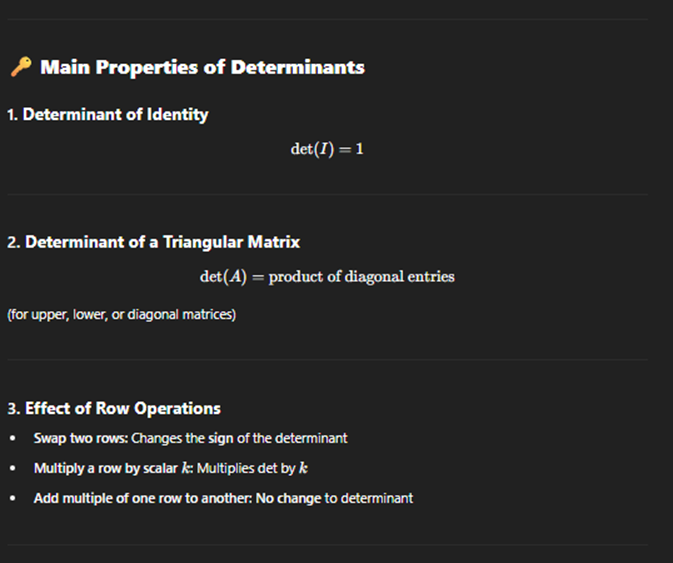
Determinant usign row operations
· Make matrix into a triangular matrix
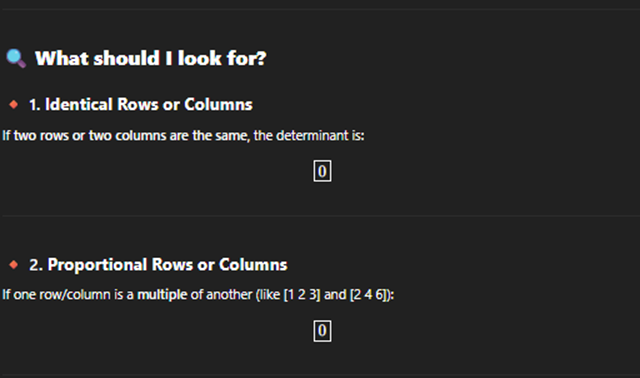
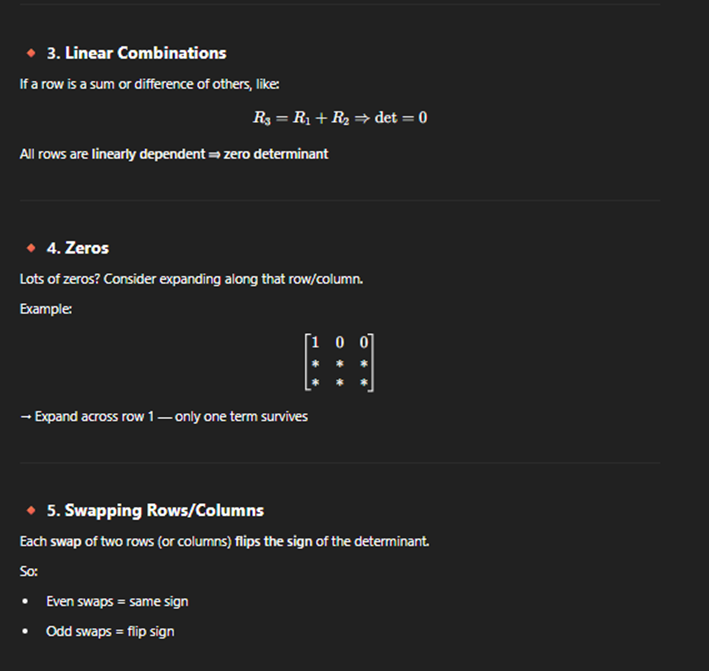
Determinant cursory inspection
· Cursory inspection means evaluating a determinant quickly by observing special patterns or properties — without full cofactor expansion or row reduction.
· It saves time, especially on multiple choice tests or when recognizing zero determinants.
Vector formula
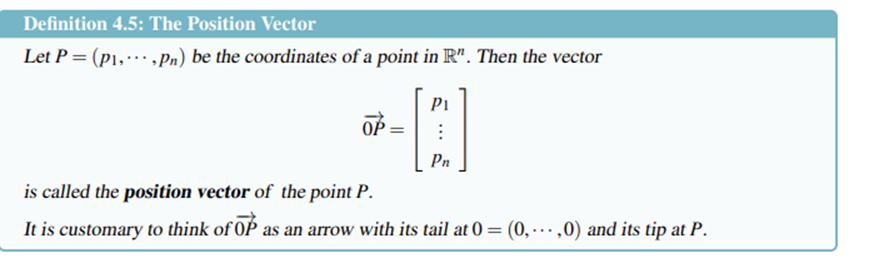
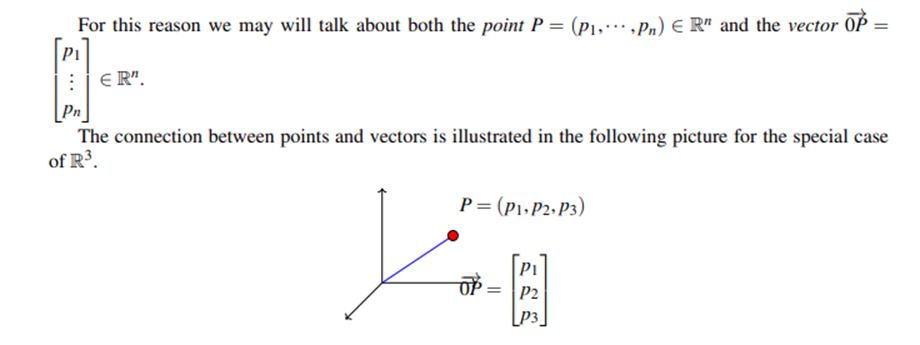
Position Vector
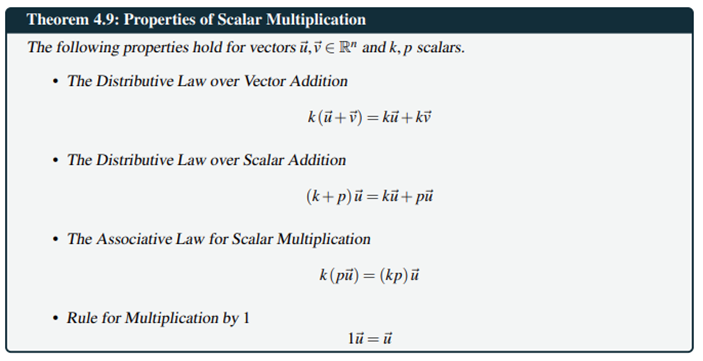
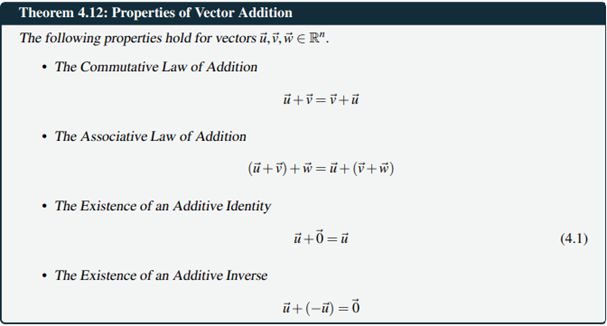
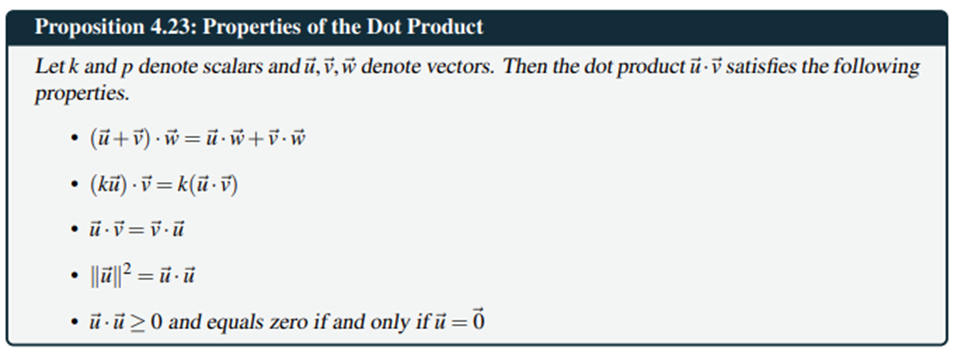
Properteis of Vector
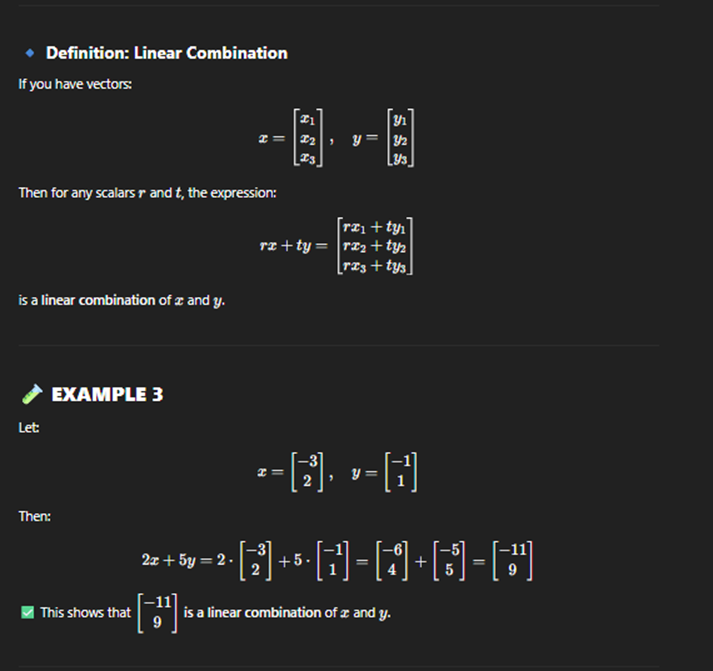
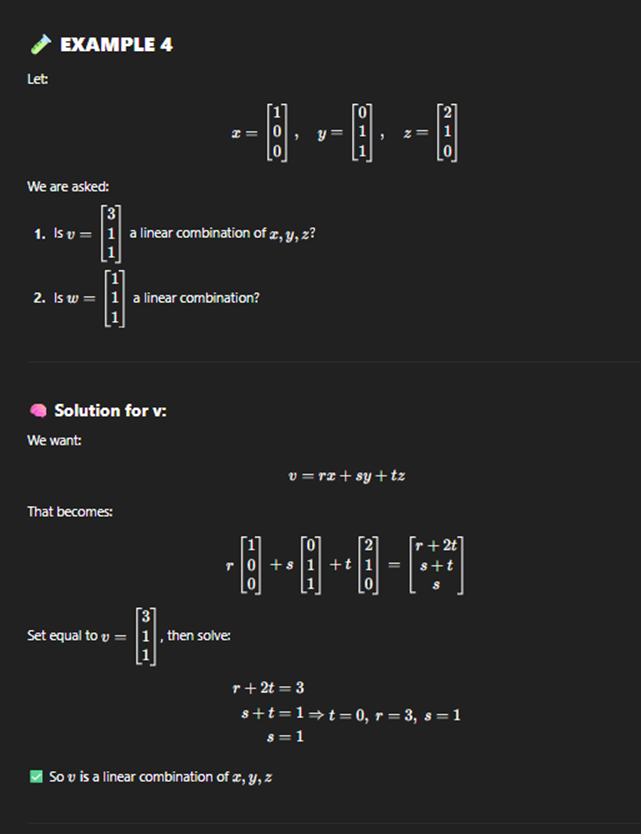
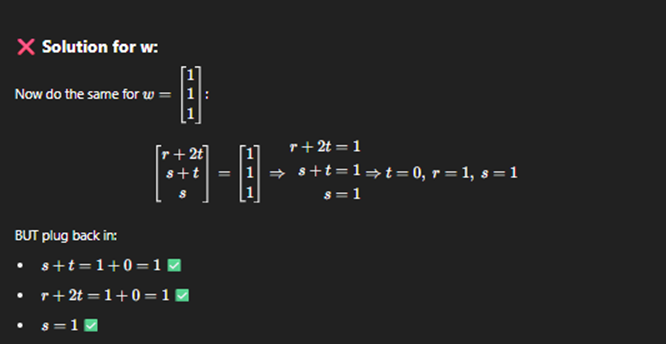
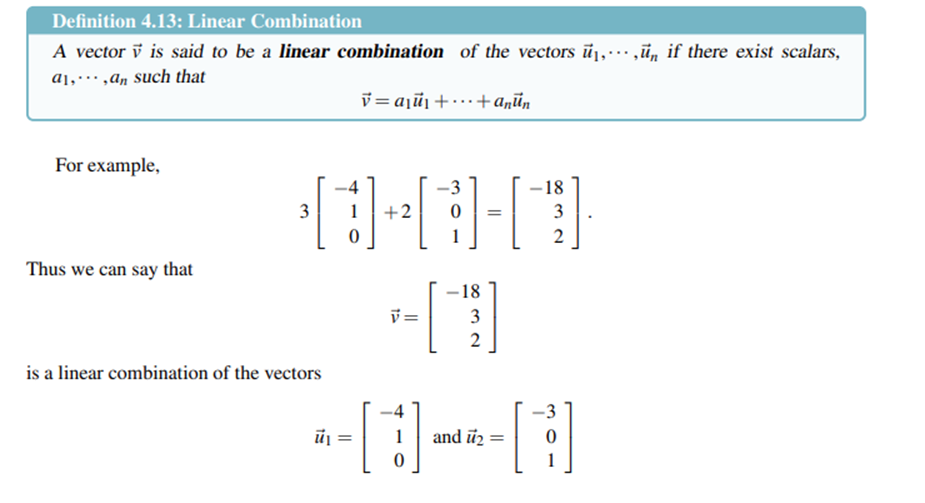
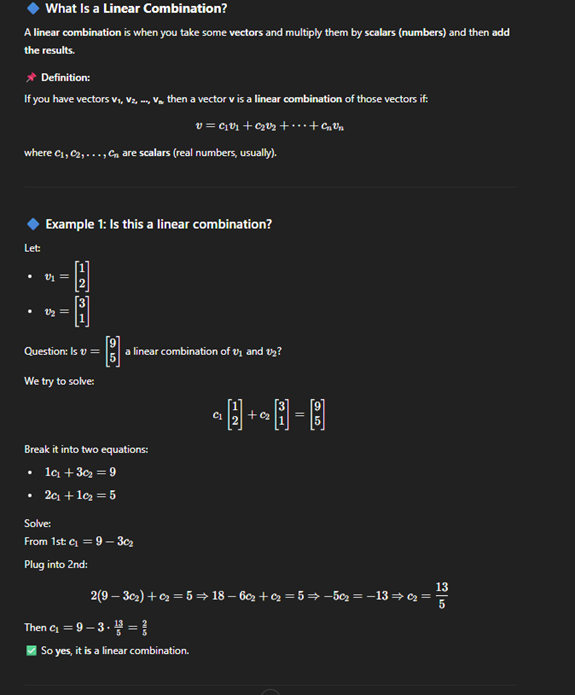
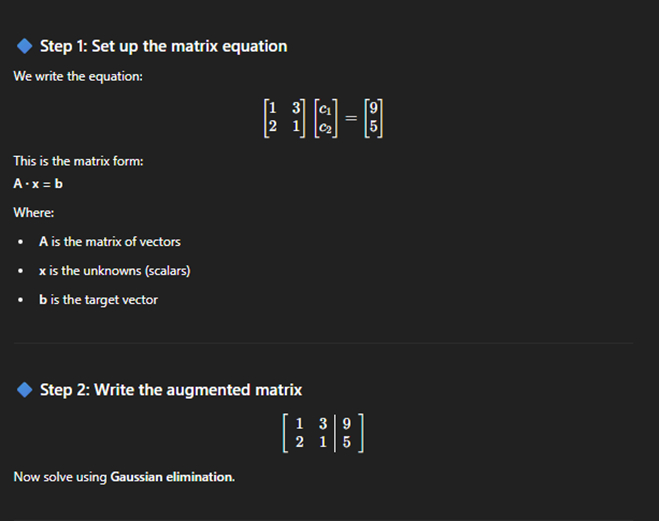
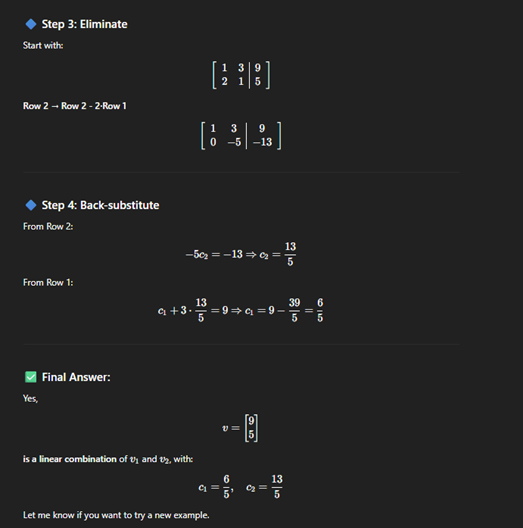
Vector Linear combination
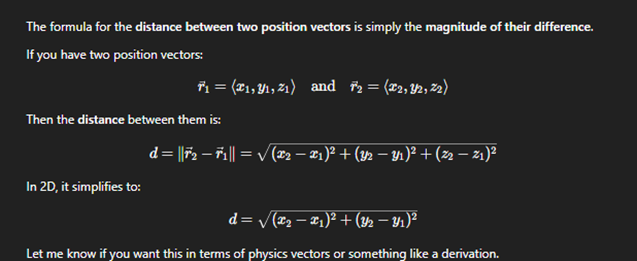
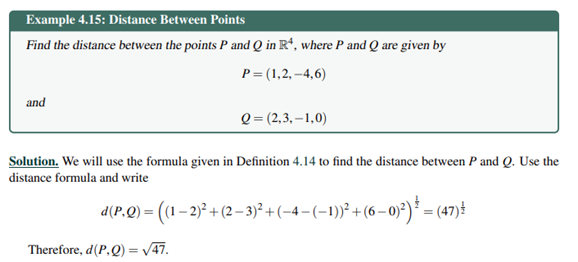
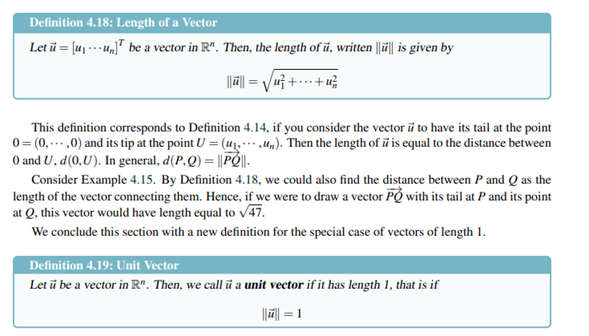
Distance between points
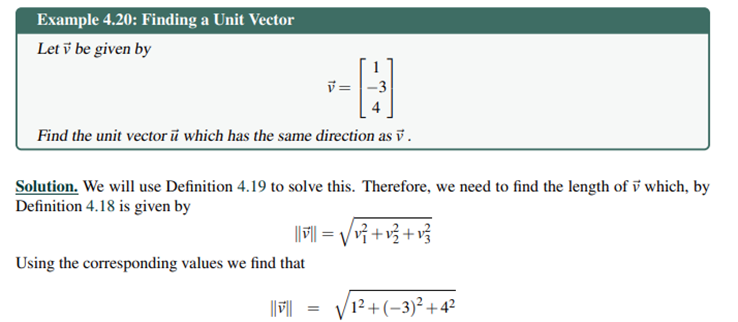
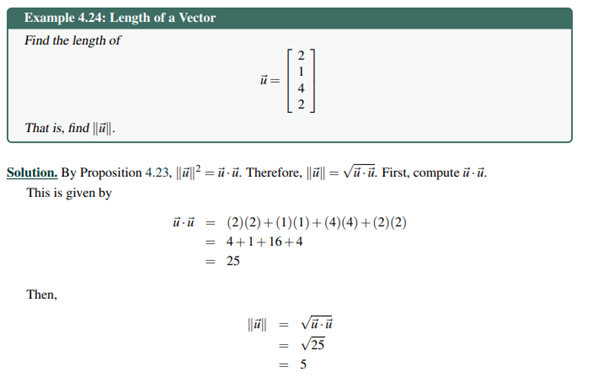
Length and Unit vector
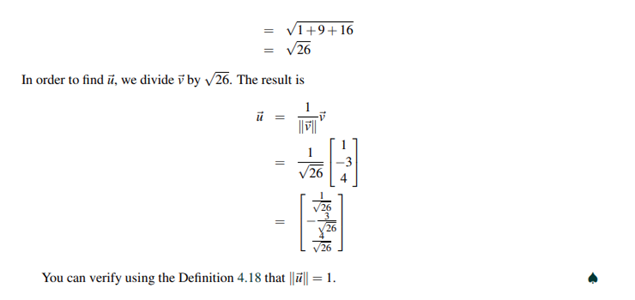
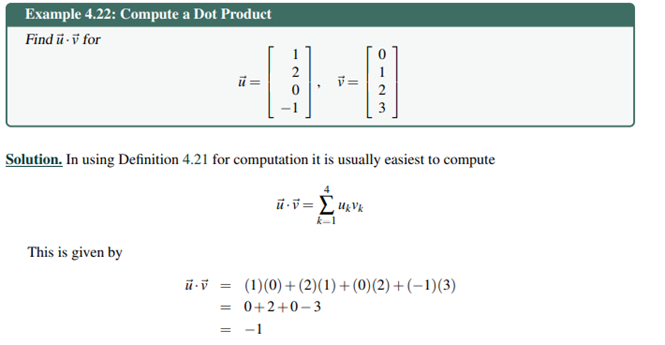
Dot product
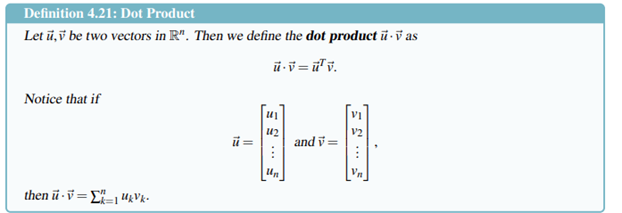
if dot product 0 means hey are perpendicular(othrogonal)( right angle) to each other

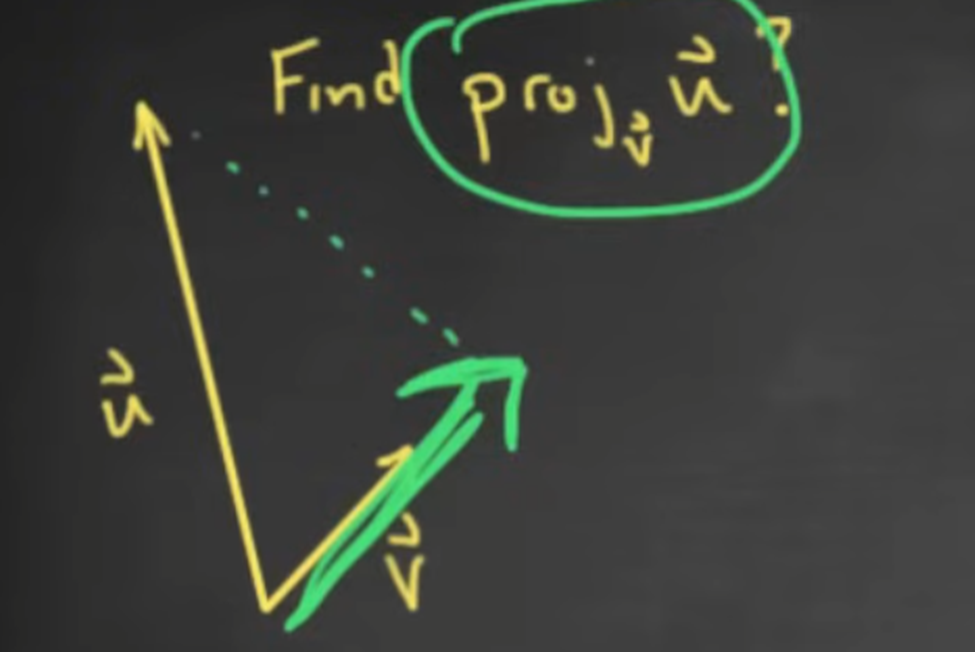
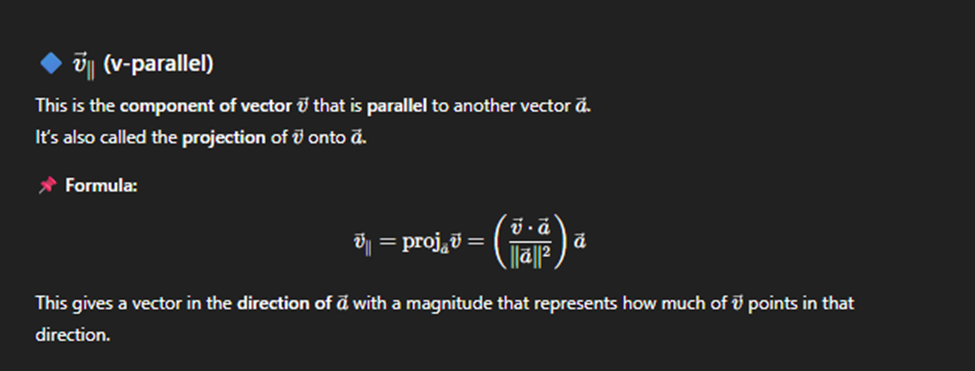
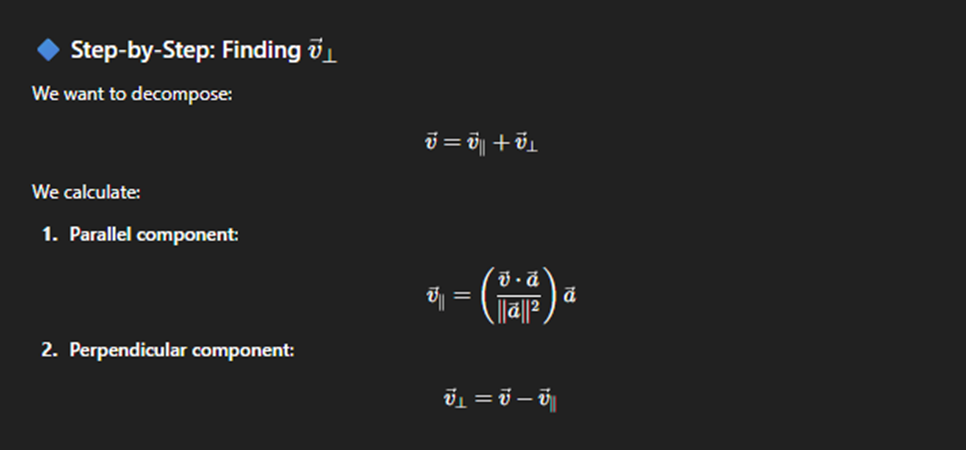
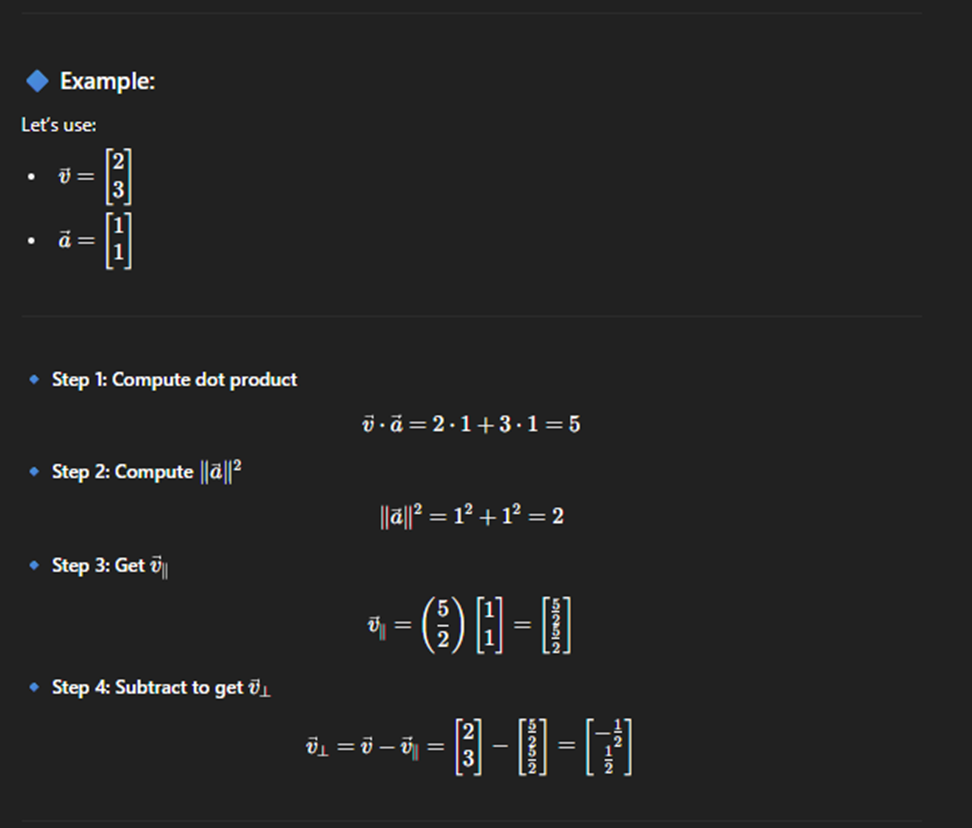
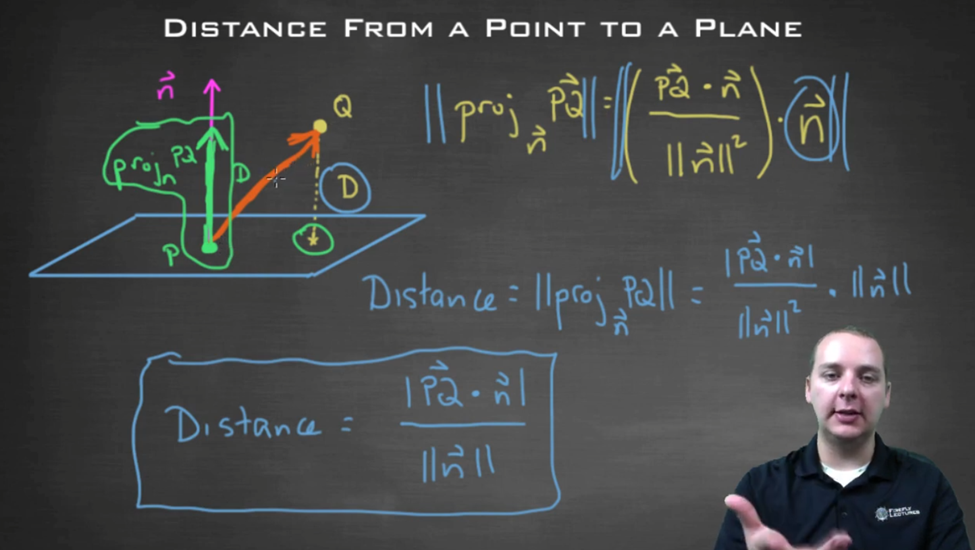
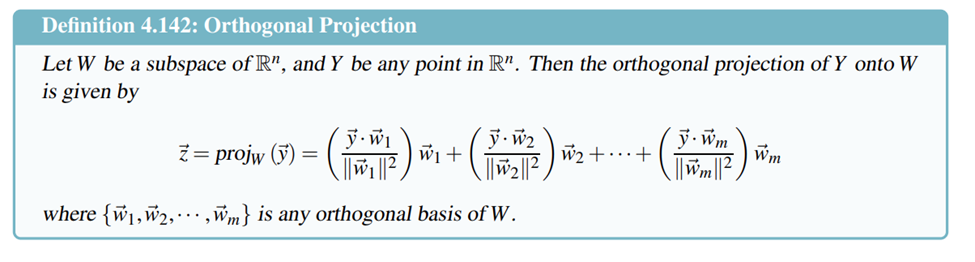
Projection vector
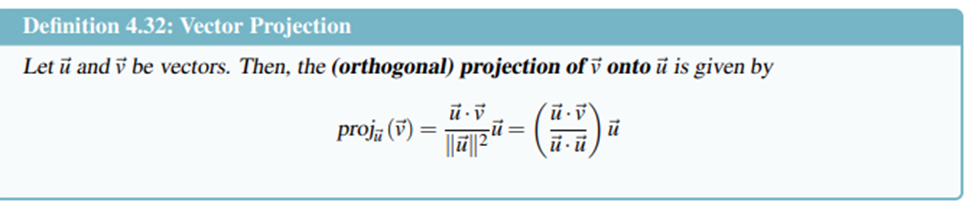
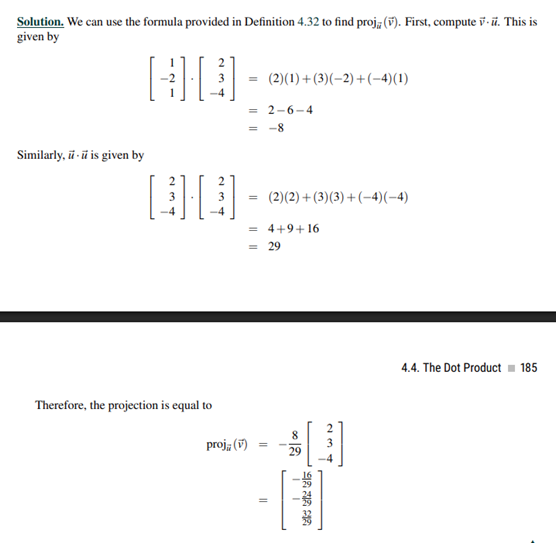
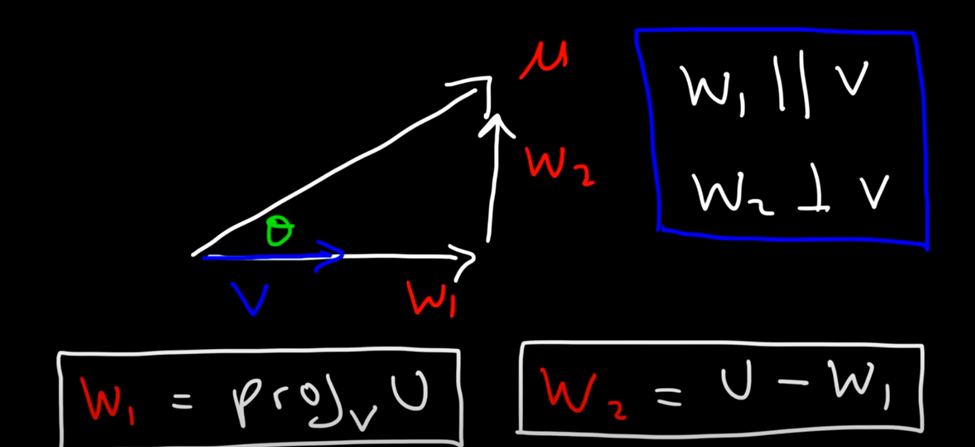
w1, and w2 are components of Vector U
w1 is projection of vector U onto vector V(thats how its described)(component of Vector U that is parralel to vector V
w2 is teh component of vector U that is othorgonal to vector V
Projection tells you how far one vector goes in the direction of another vector.
Why we use projection: 1. Shortest distance to a line or plane
Want to know the closest point on a line to a point? Use projection.
→ You find where the "shadow" of the point lands on the line.


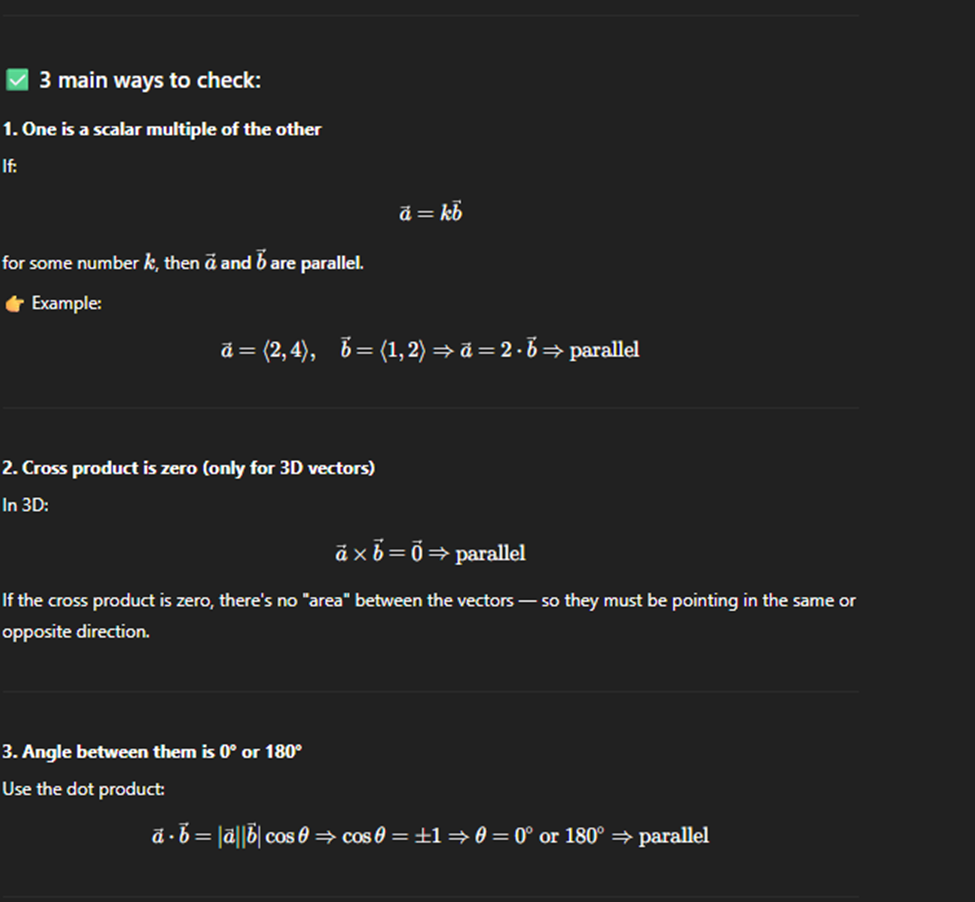
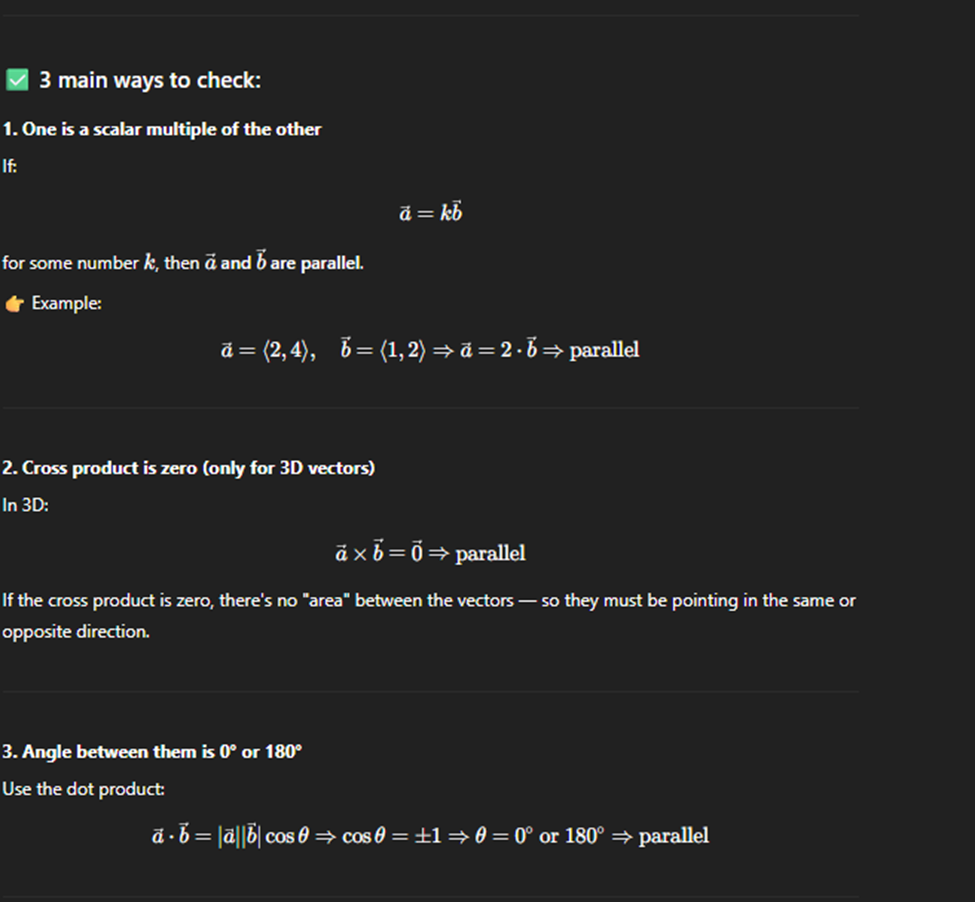
Parallel and perpendicular vectors
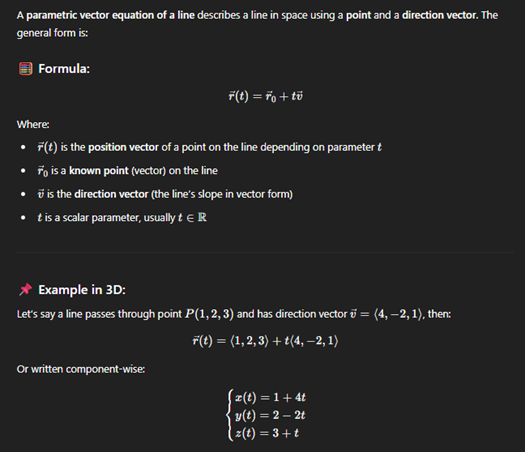
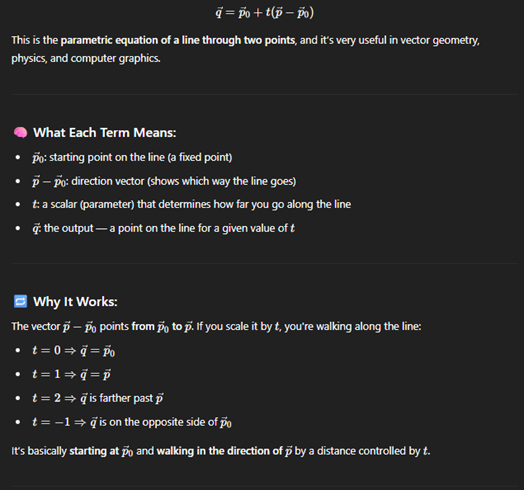
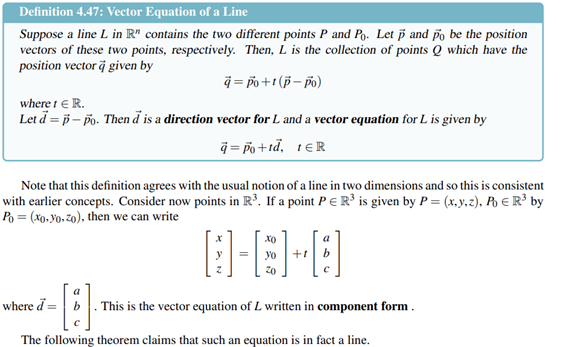
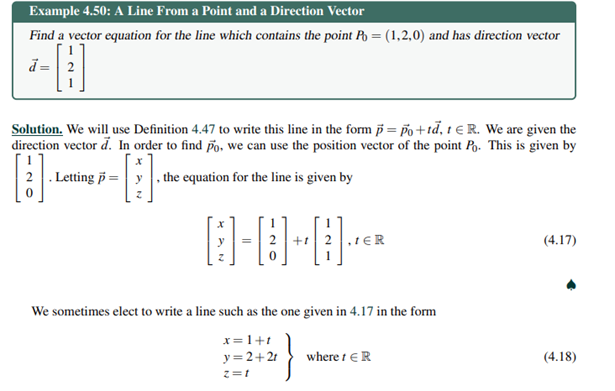
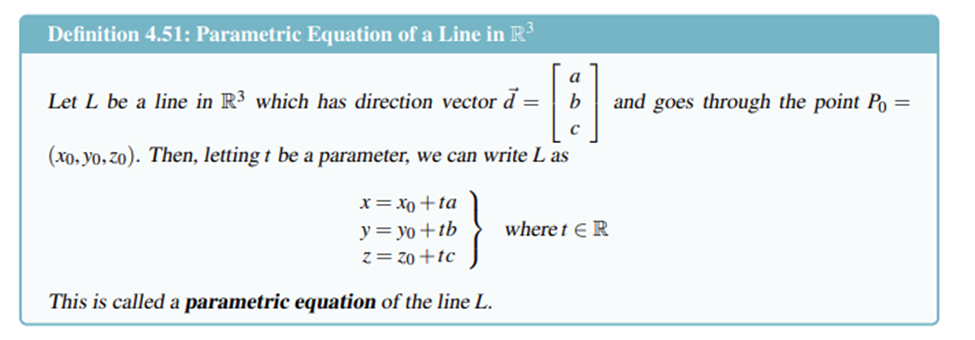
Paremetic lines
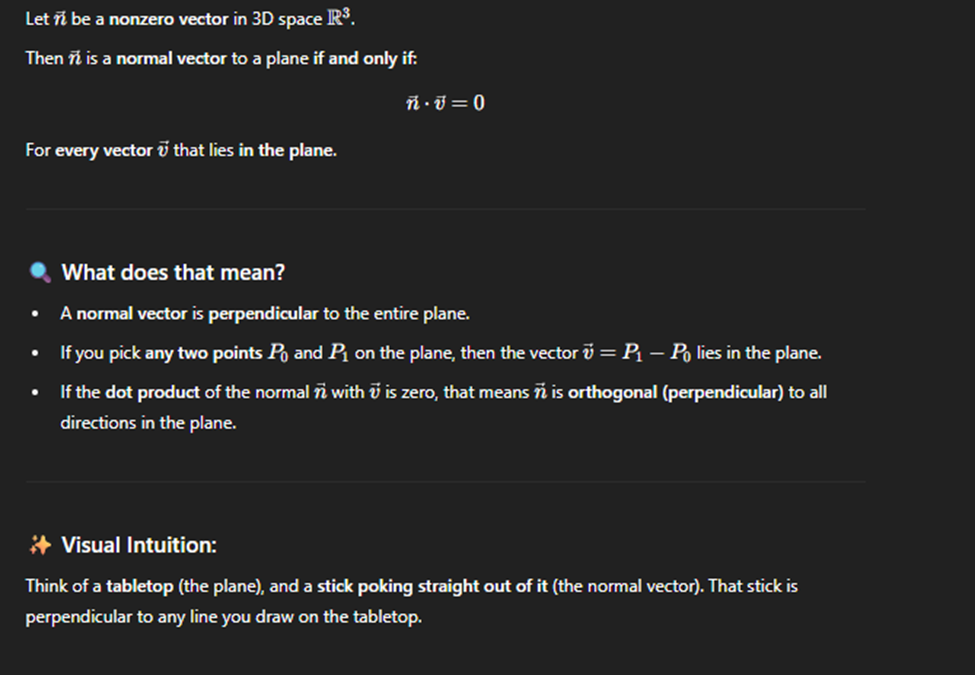
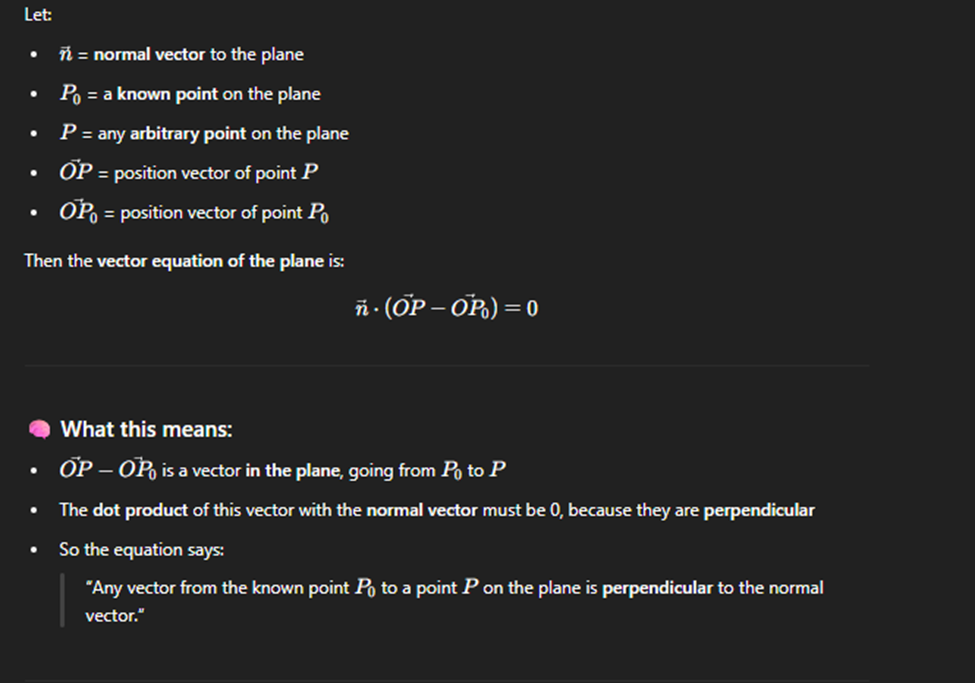
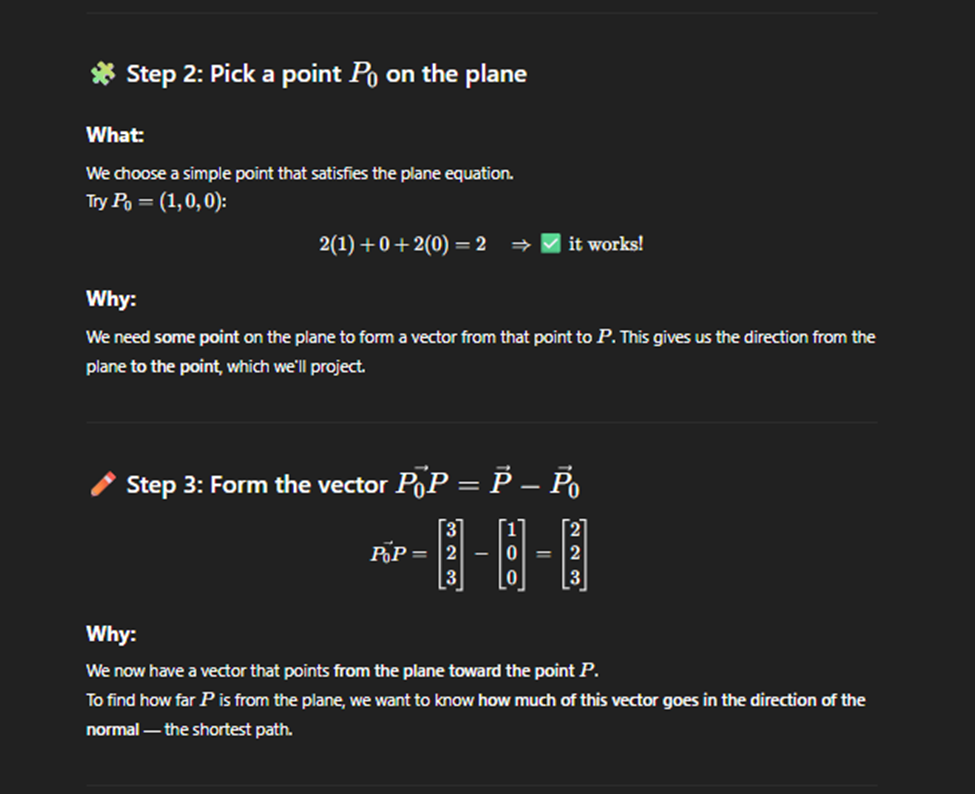
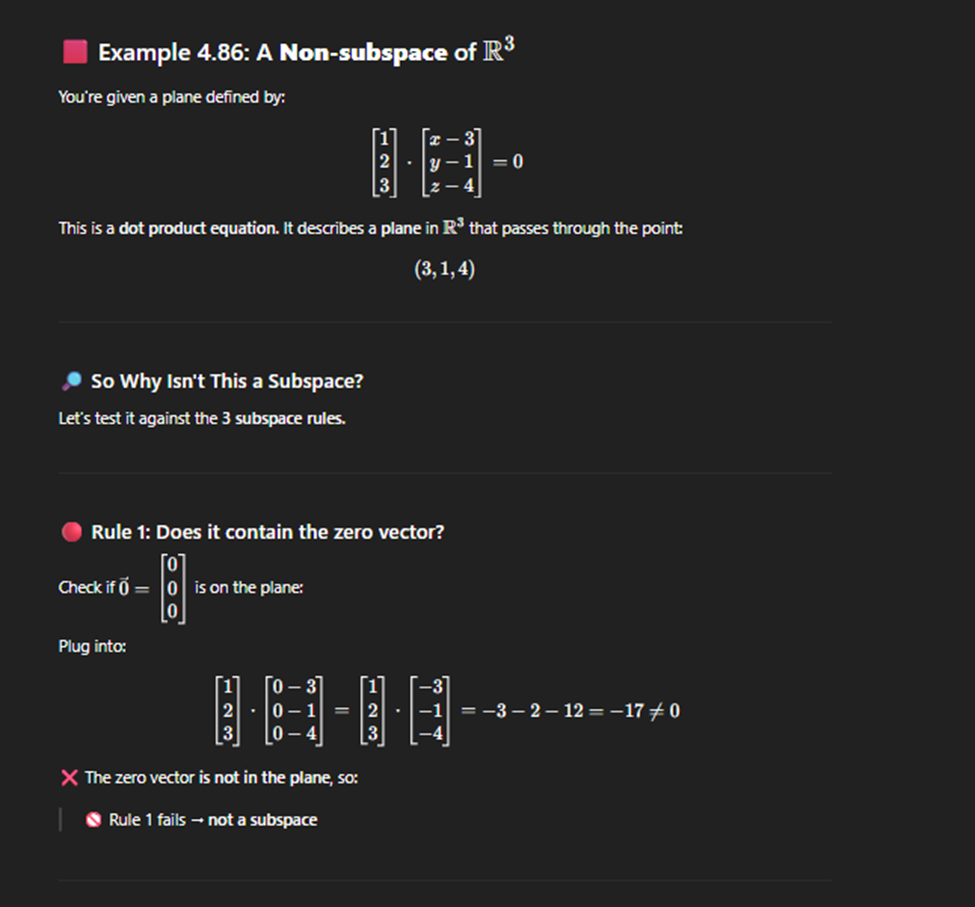
Plane Normal vector and Vector equation
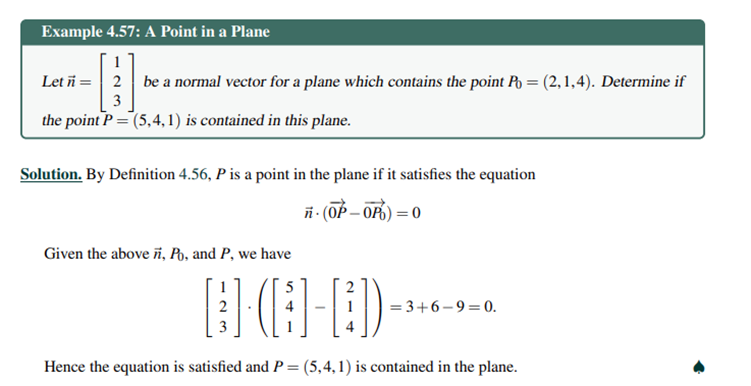
so if we get 0 then it means that P is a point on the plane
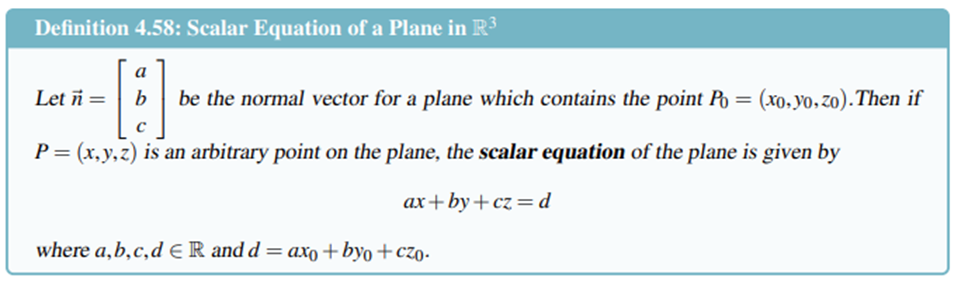
Scalar equation of a plane in R3
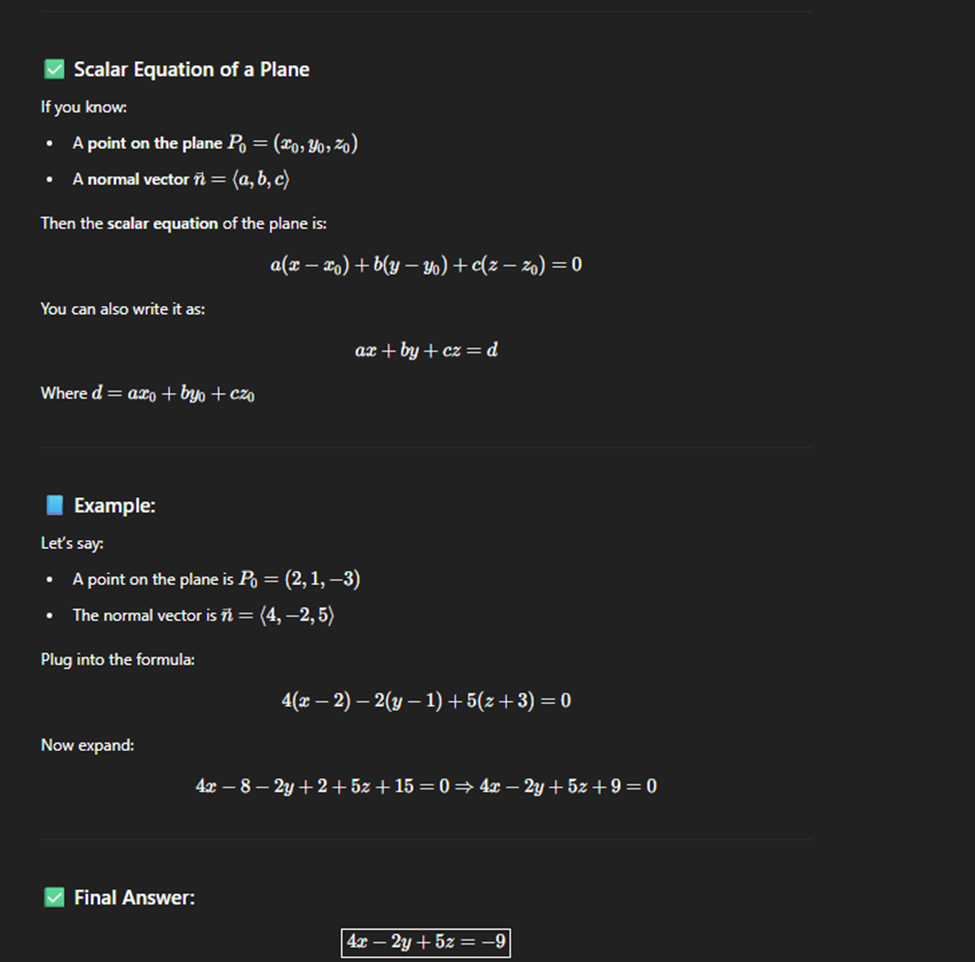
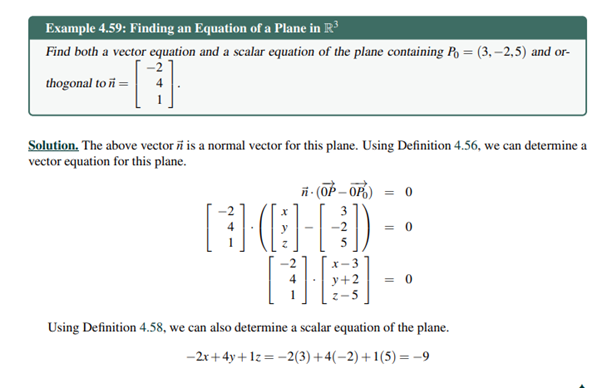
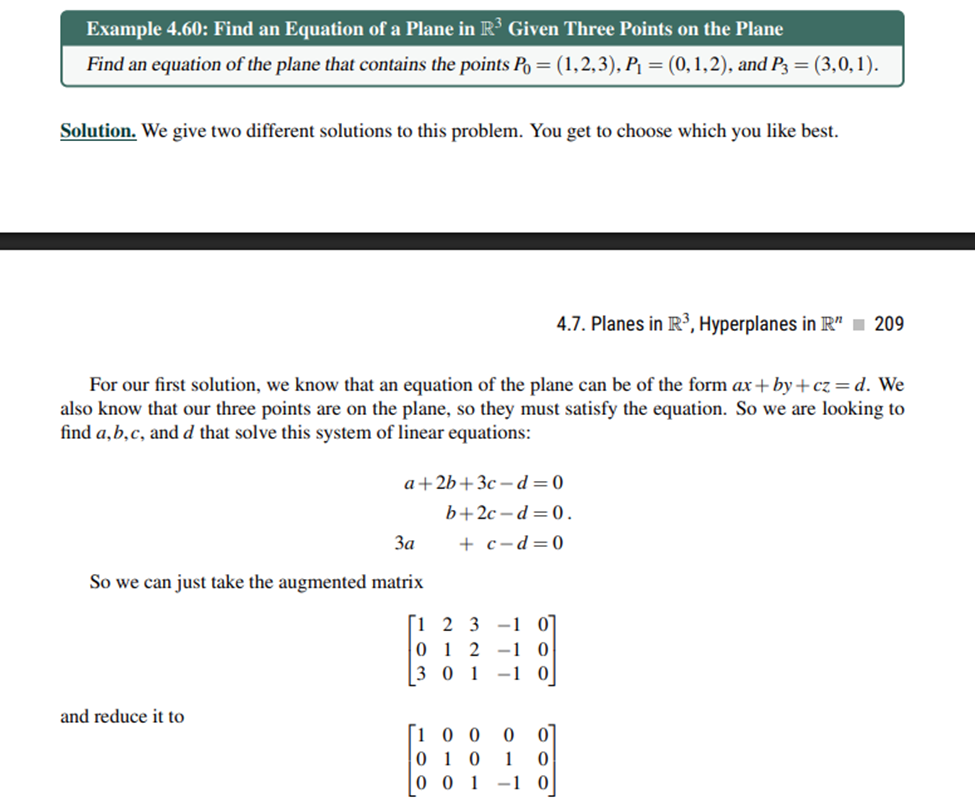
Find equation of a plane



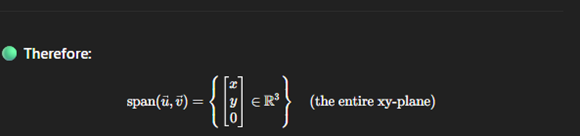
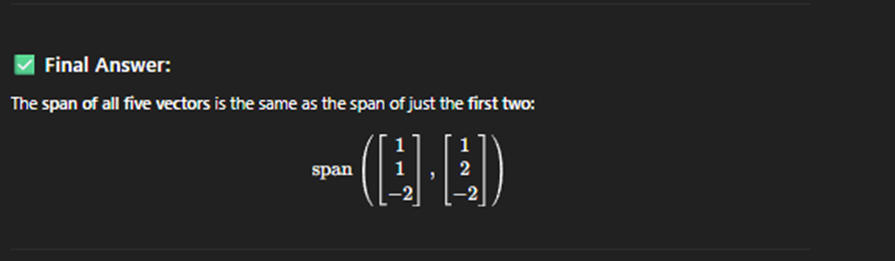
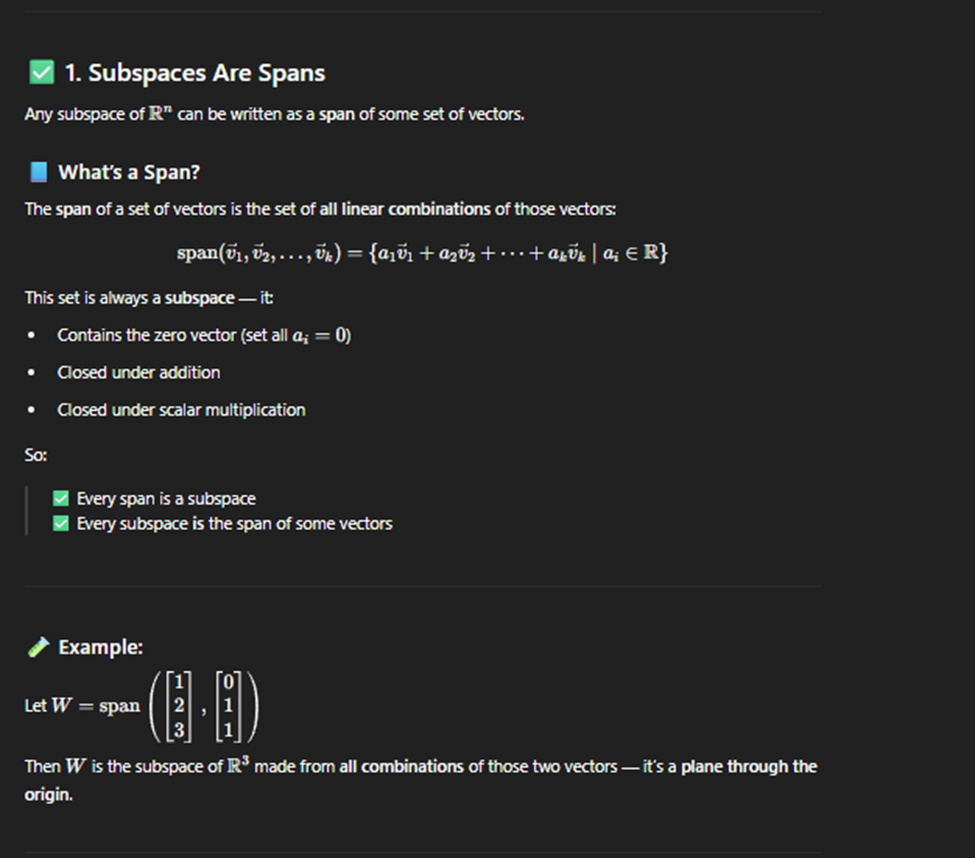
Span of vectors
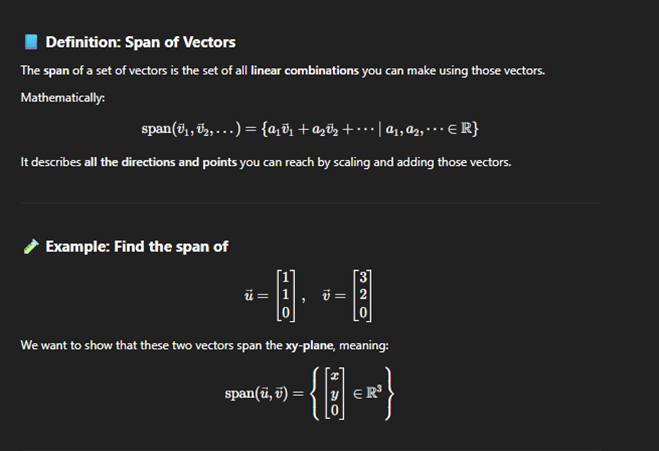
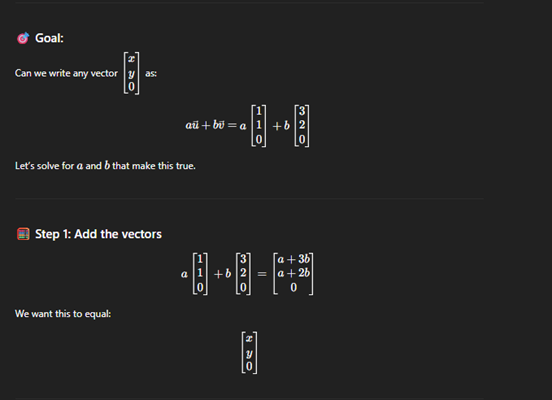
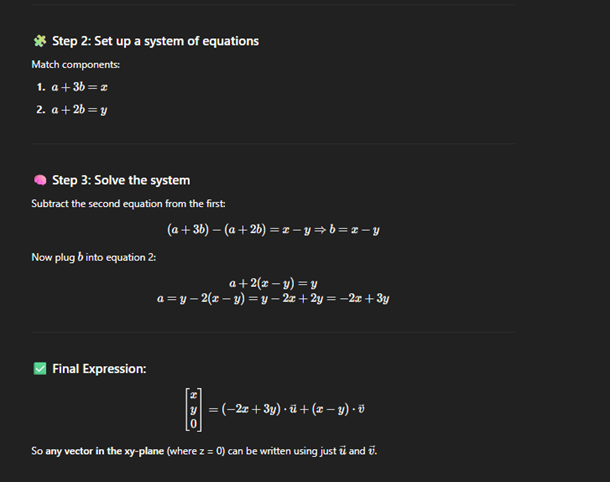
Describe vectors minum span
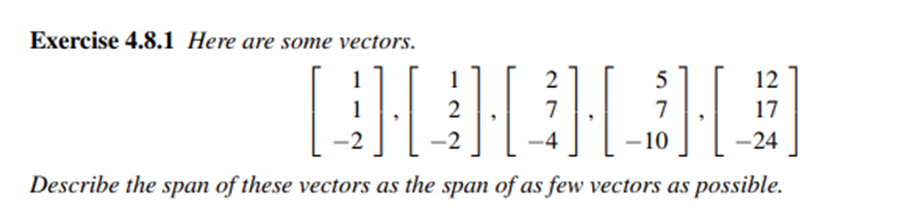
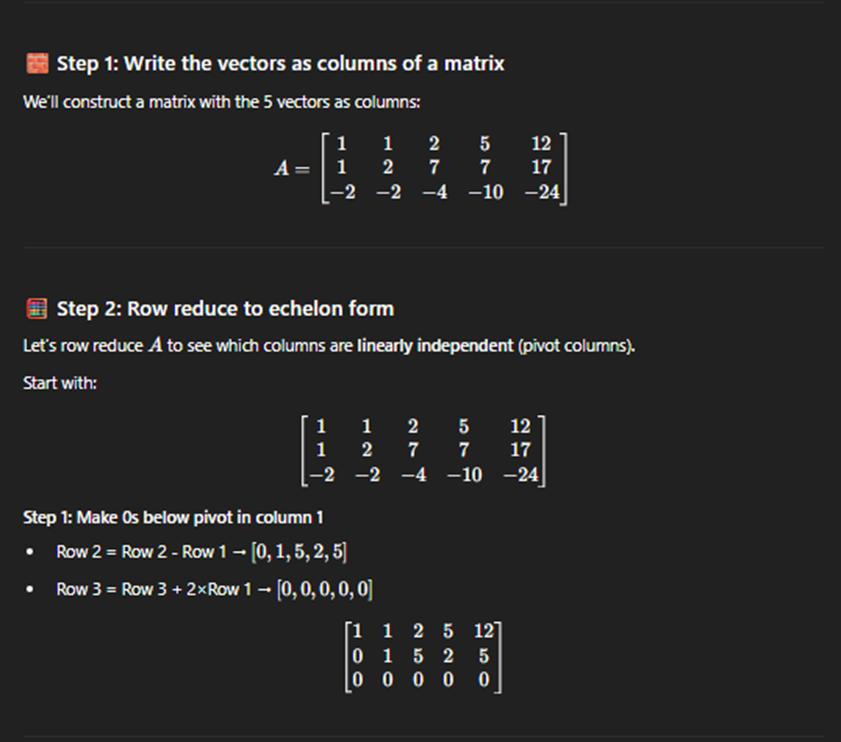
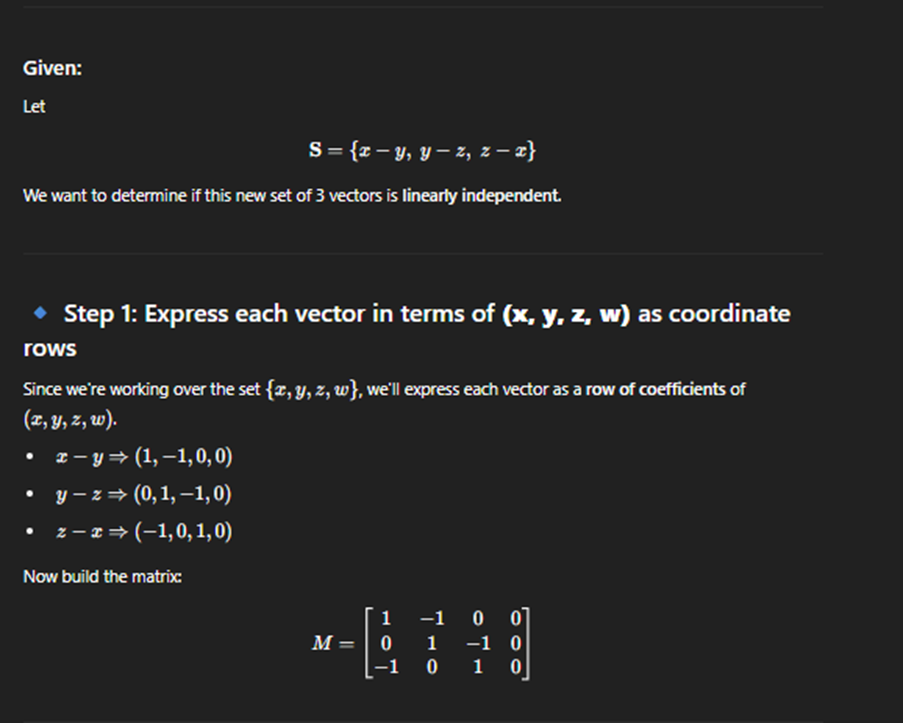
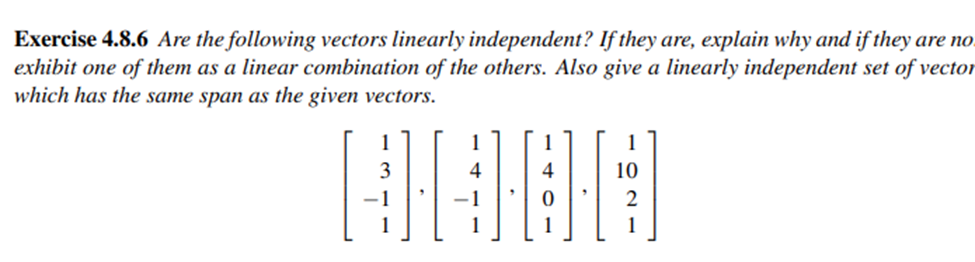
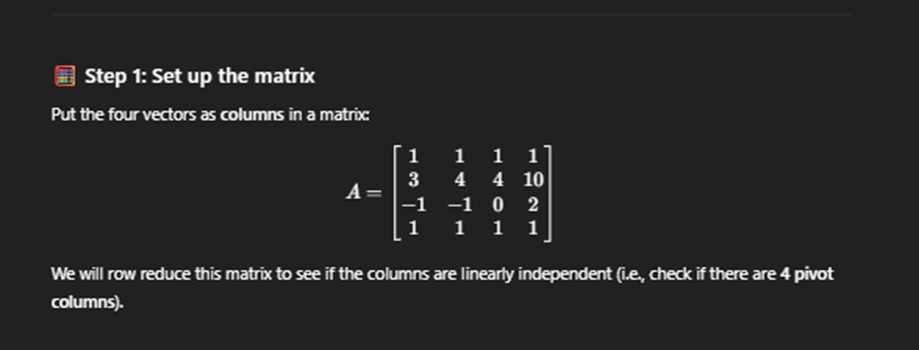
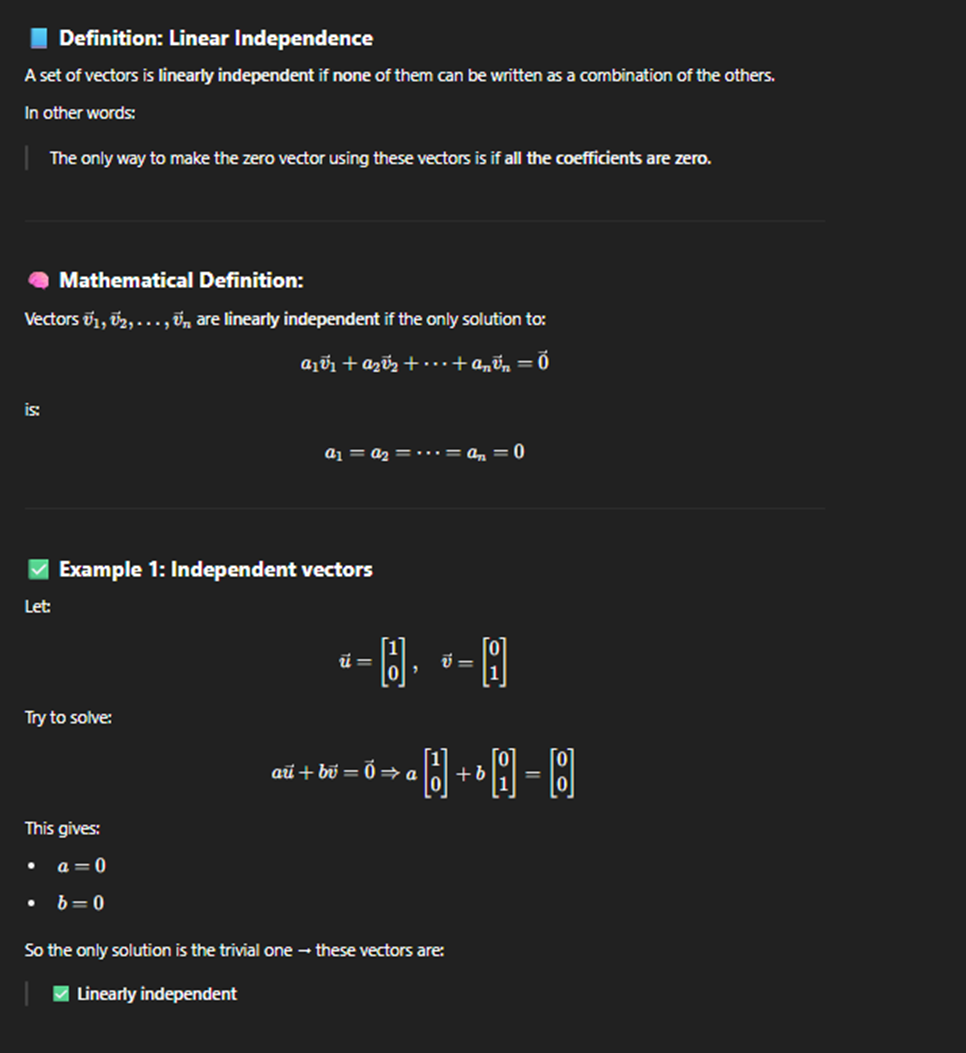
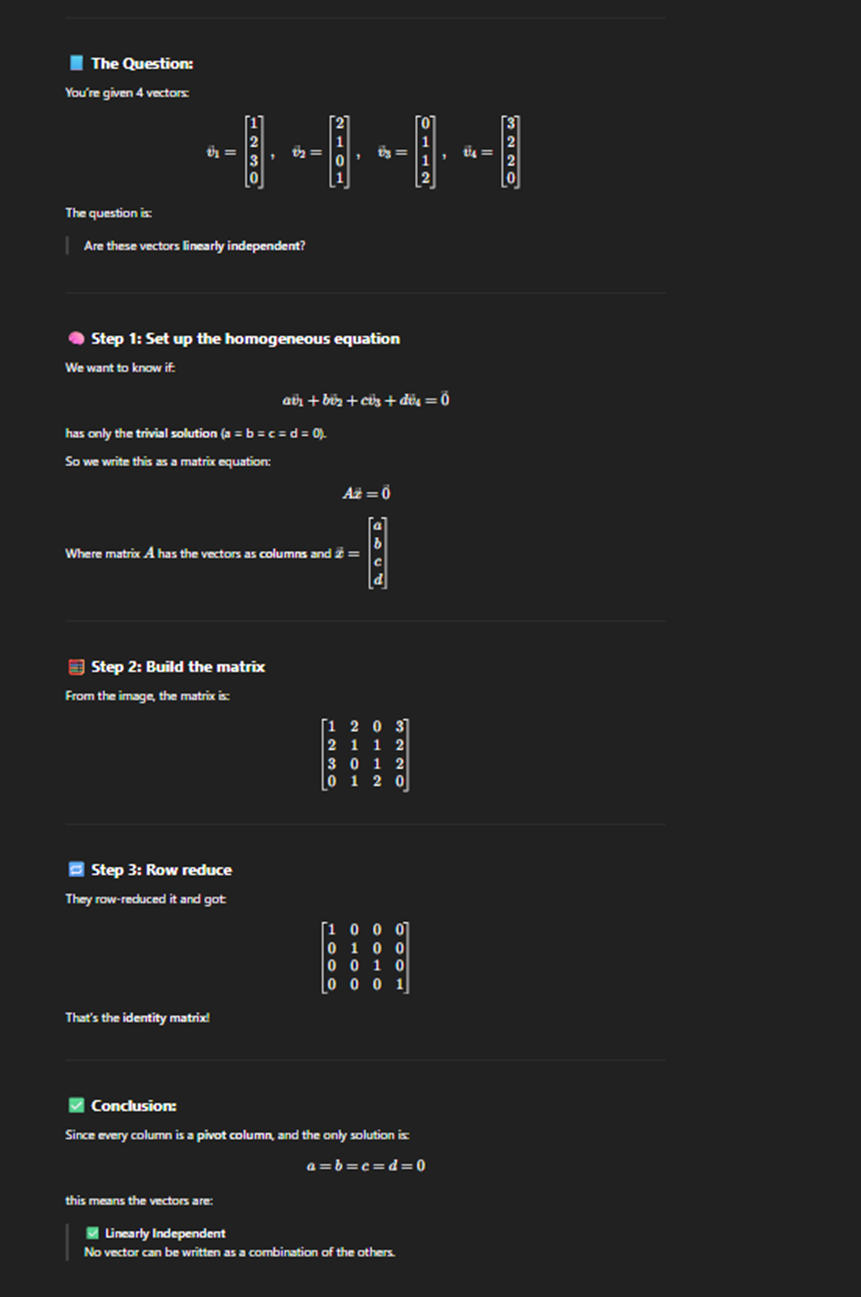
Solvign linear indpenetn
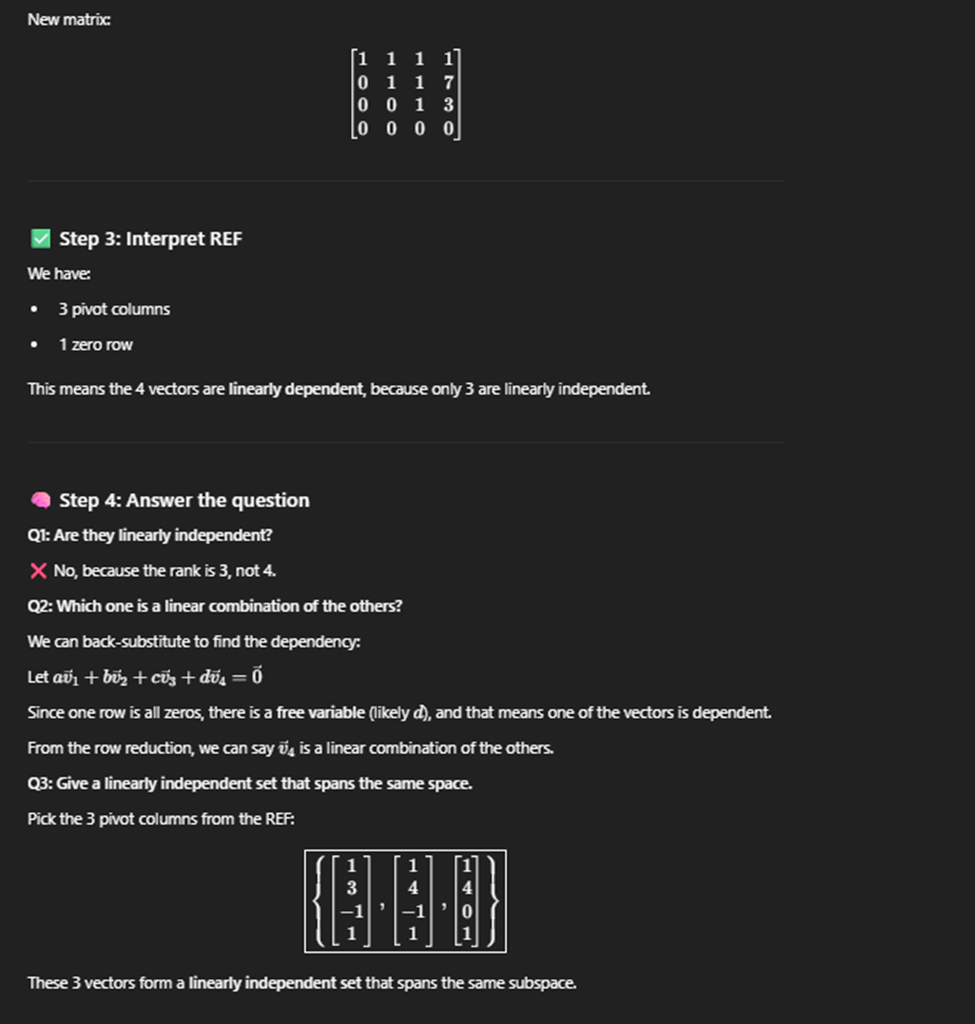
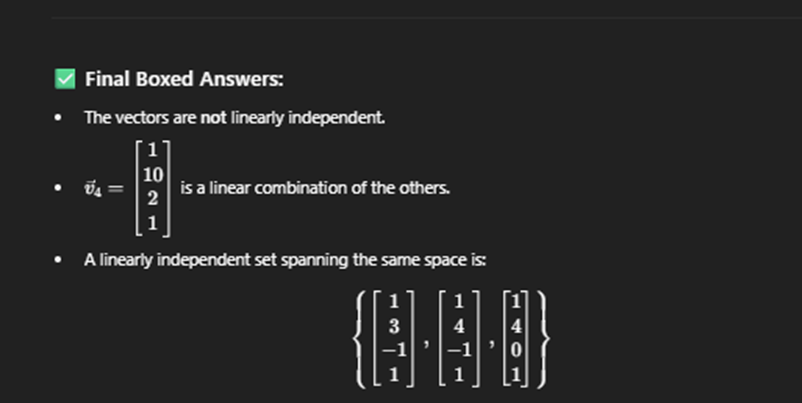
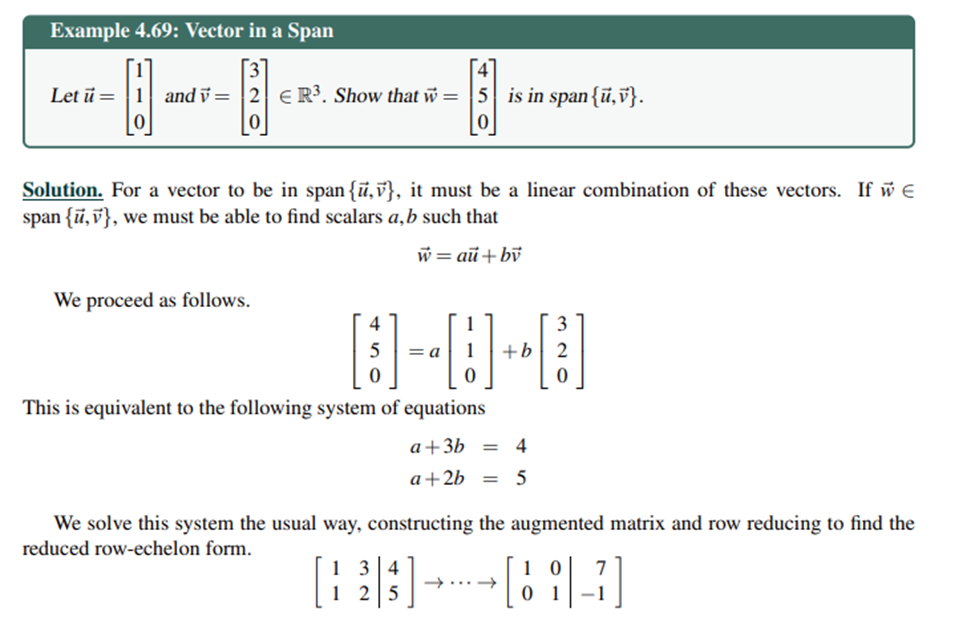
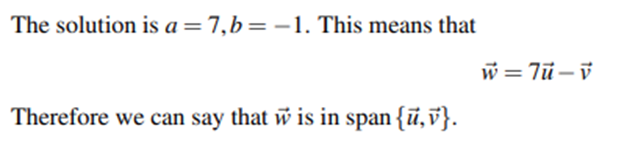
Vectors in a span
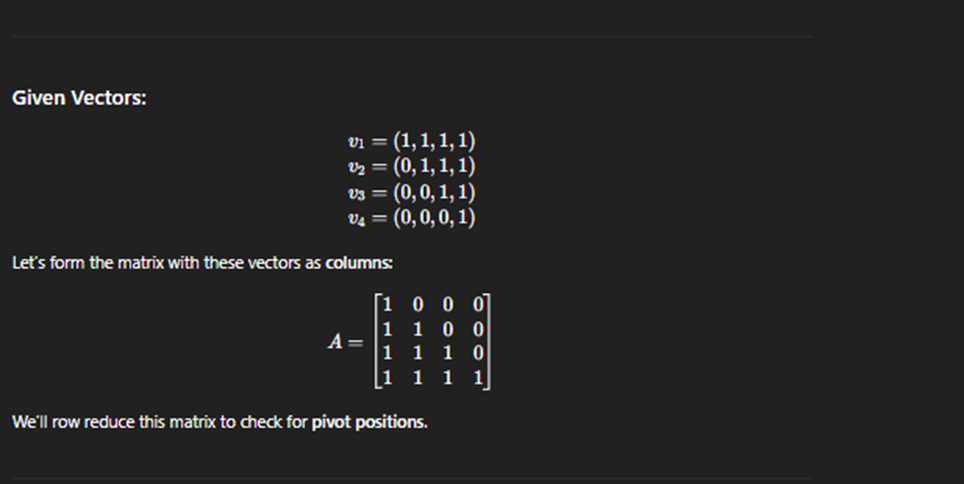
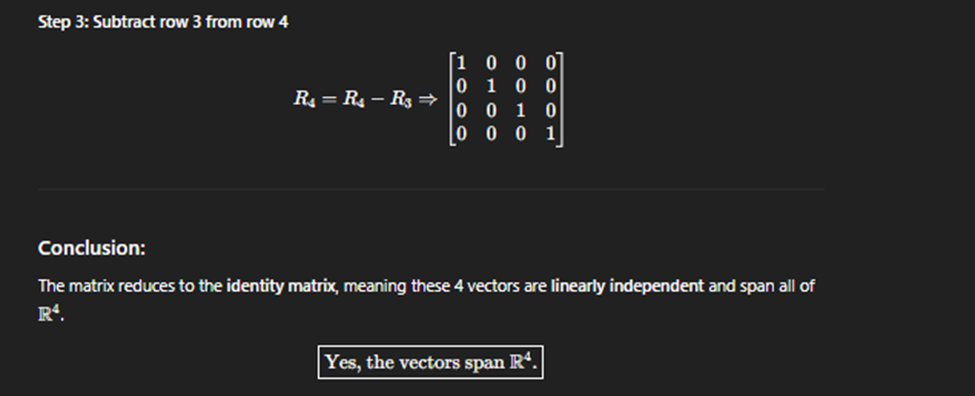
if linearly indpenedent then spans all of
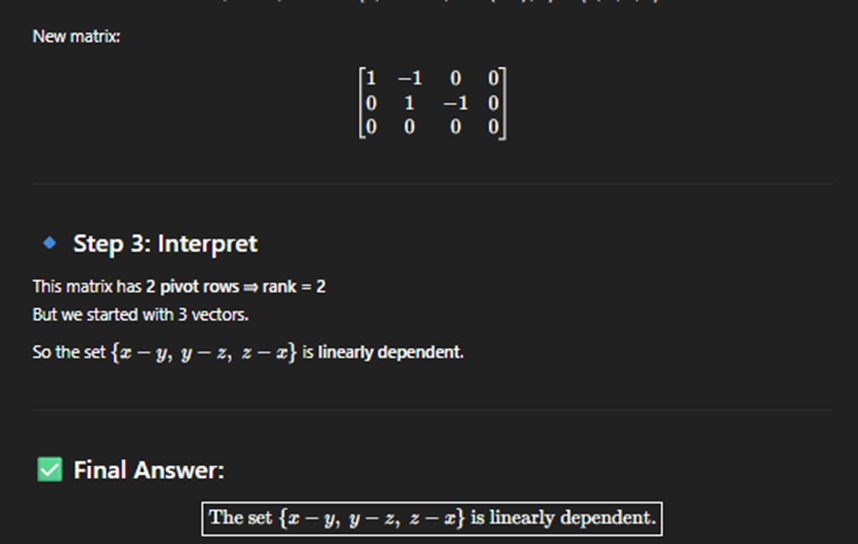
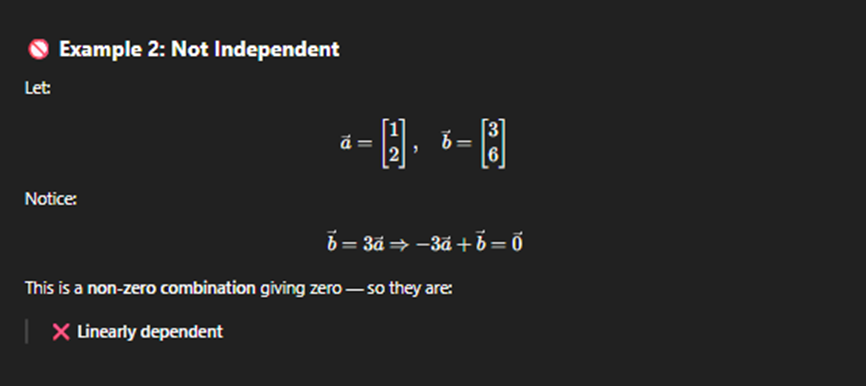
Linearly Dependent
ANY COLUMN LACKS pivot then its a linearly Dependet
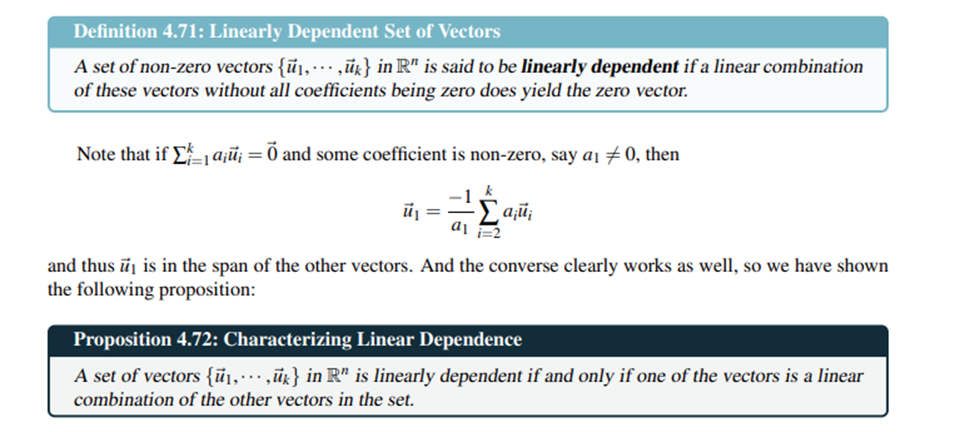
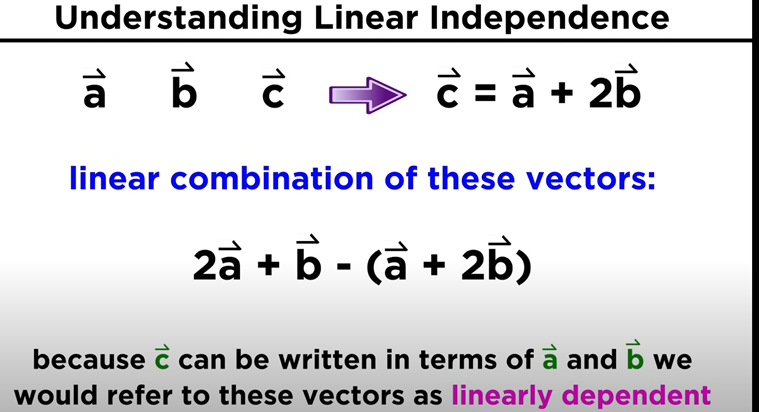
Linearnily Indpendent
Rule for linearly indpendent or Dependent on span
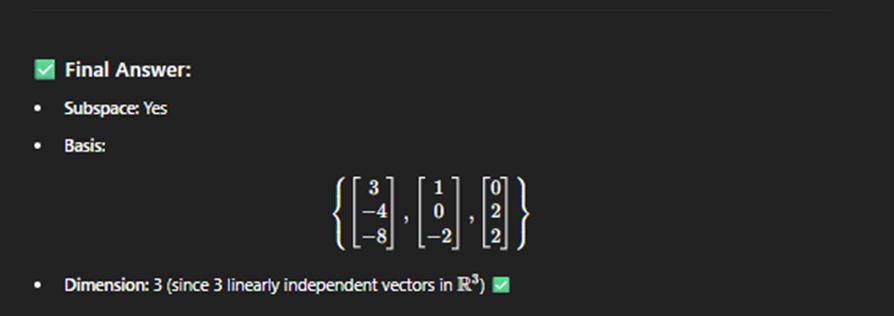
Subspace
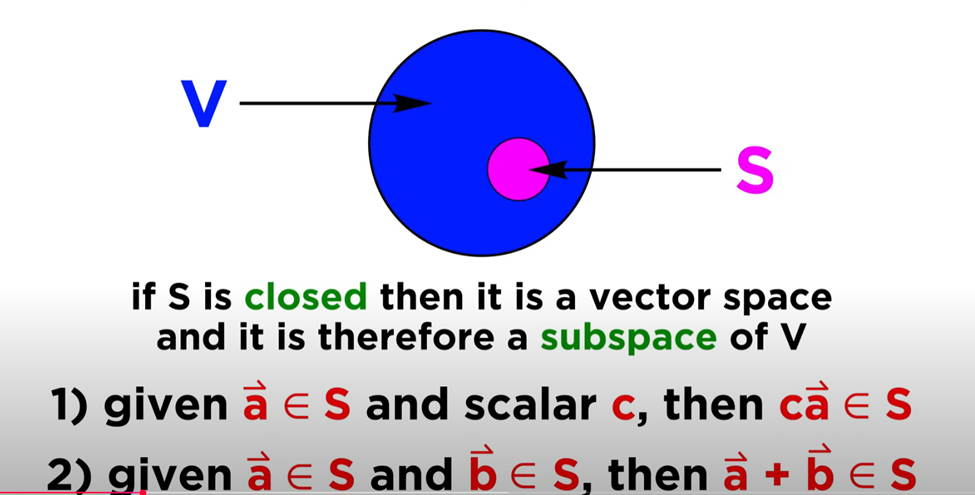
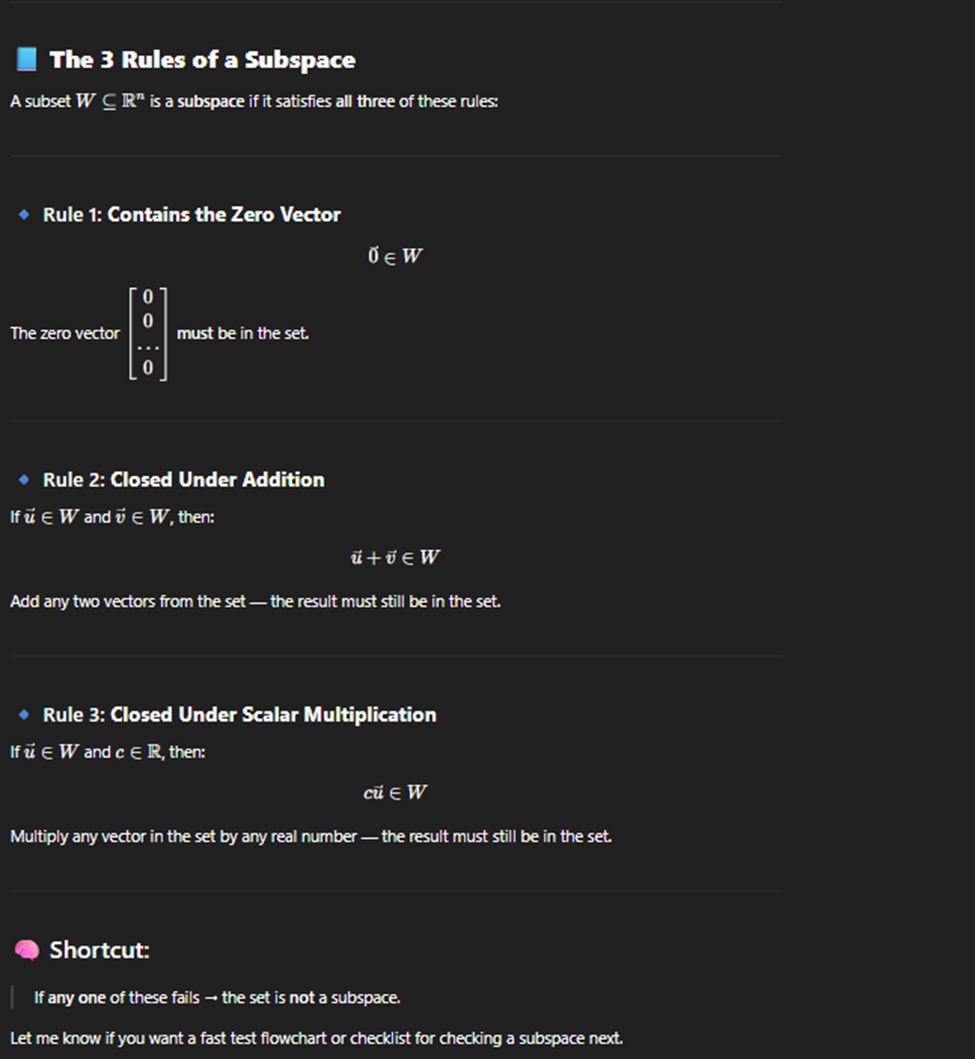

Subspace are spans
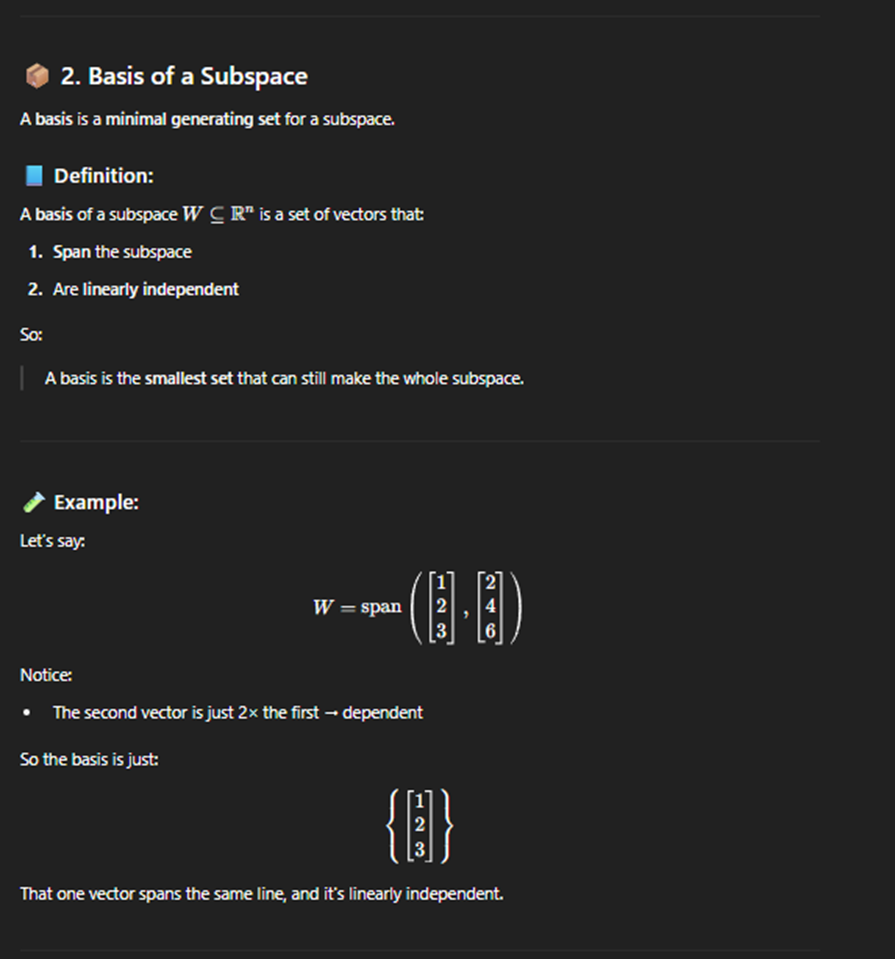
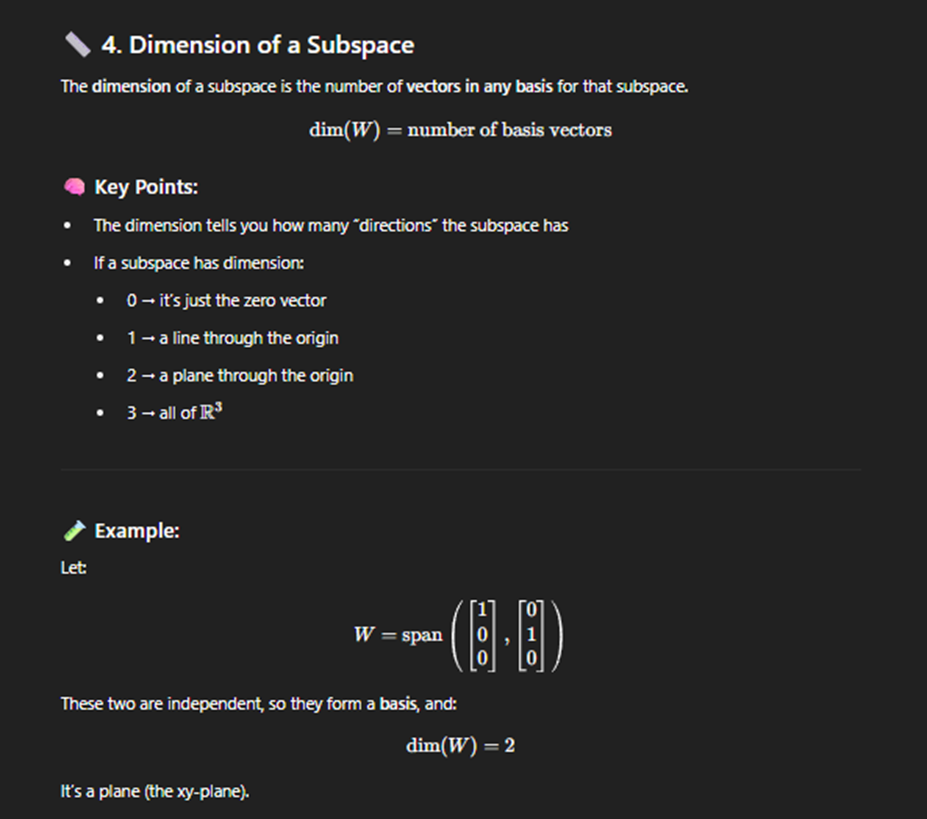
Dimention of a subspace
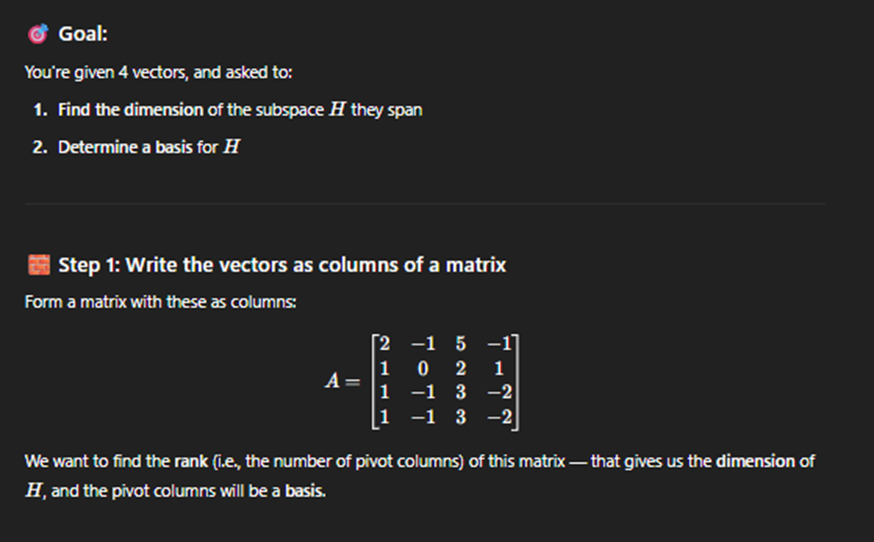
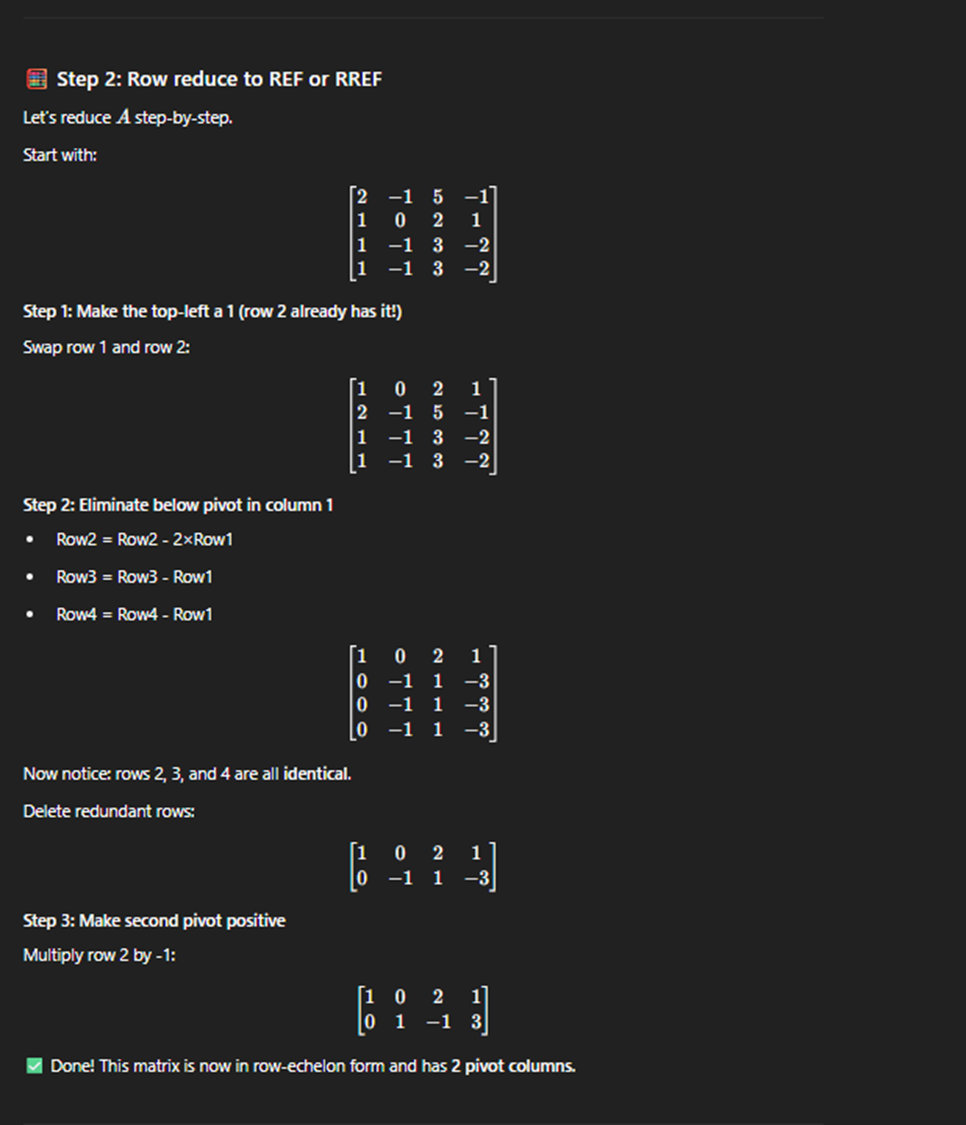
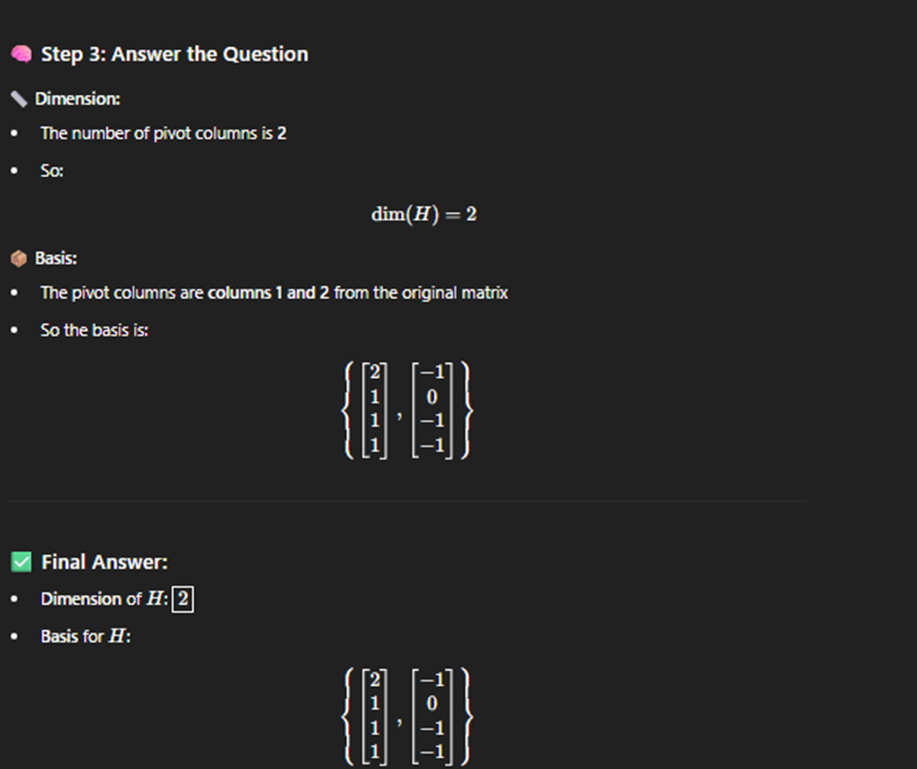
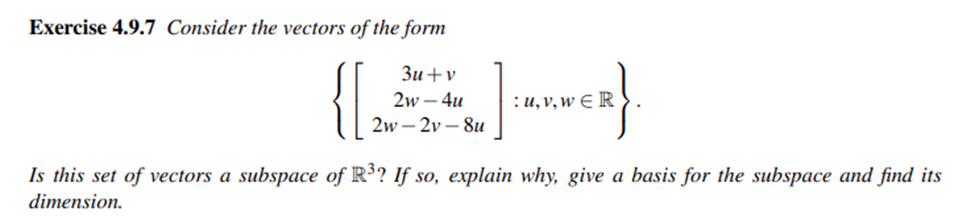
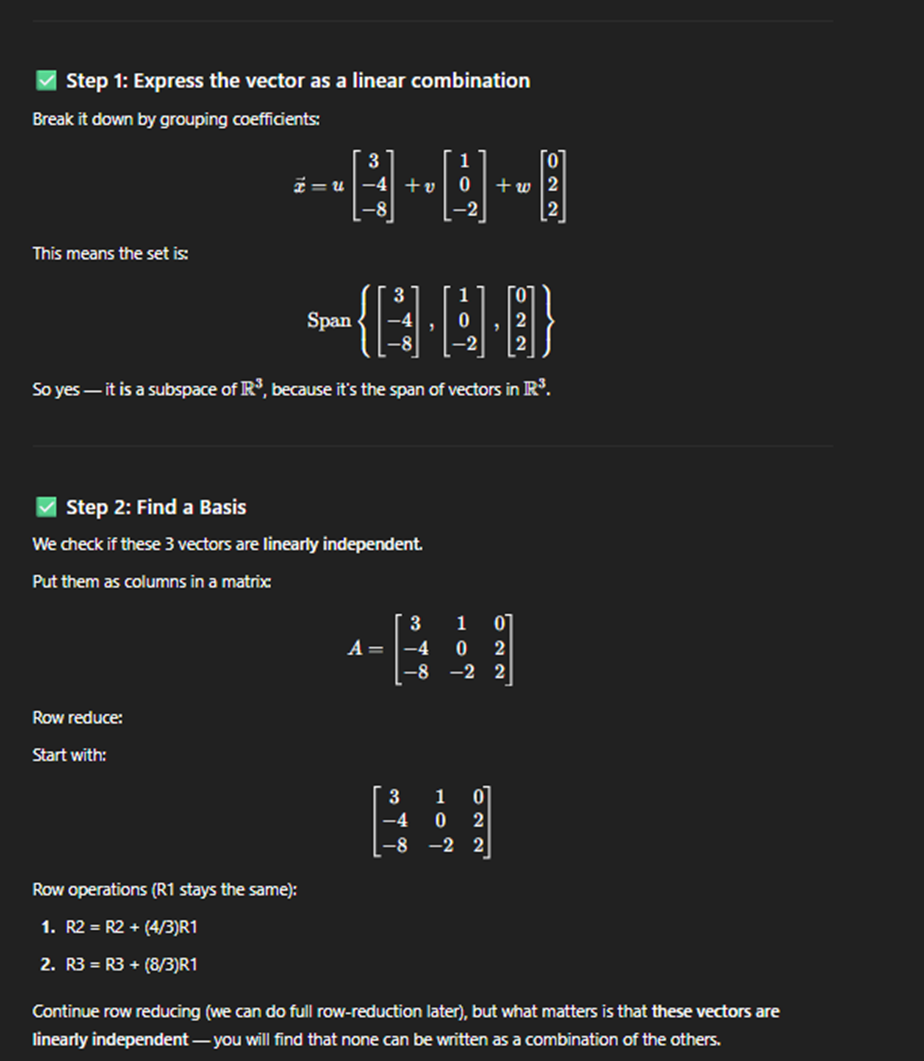
Findind dimension of Subspace and basis

Solving subspace

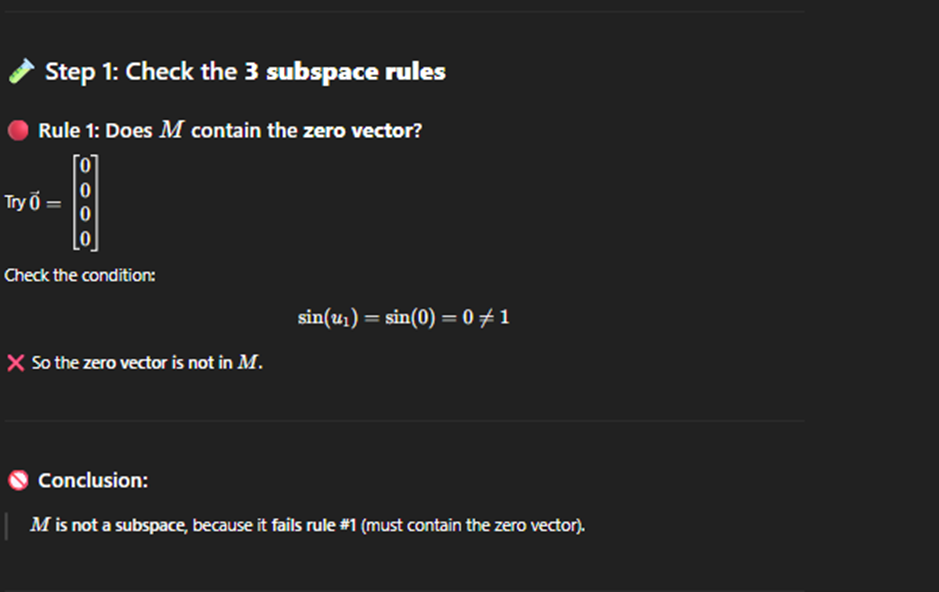
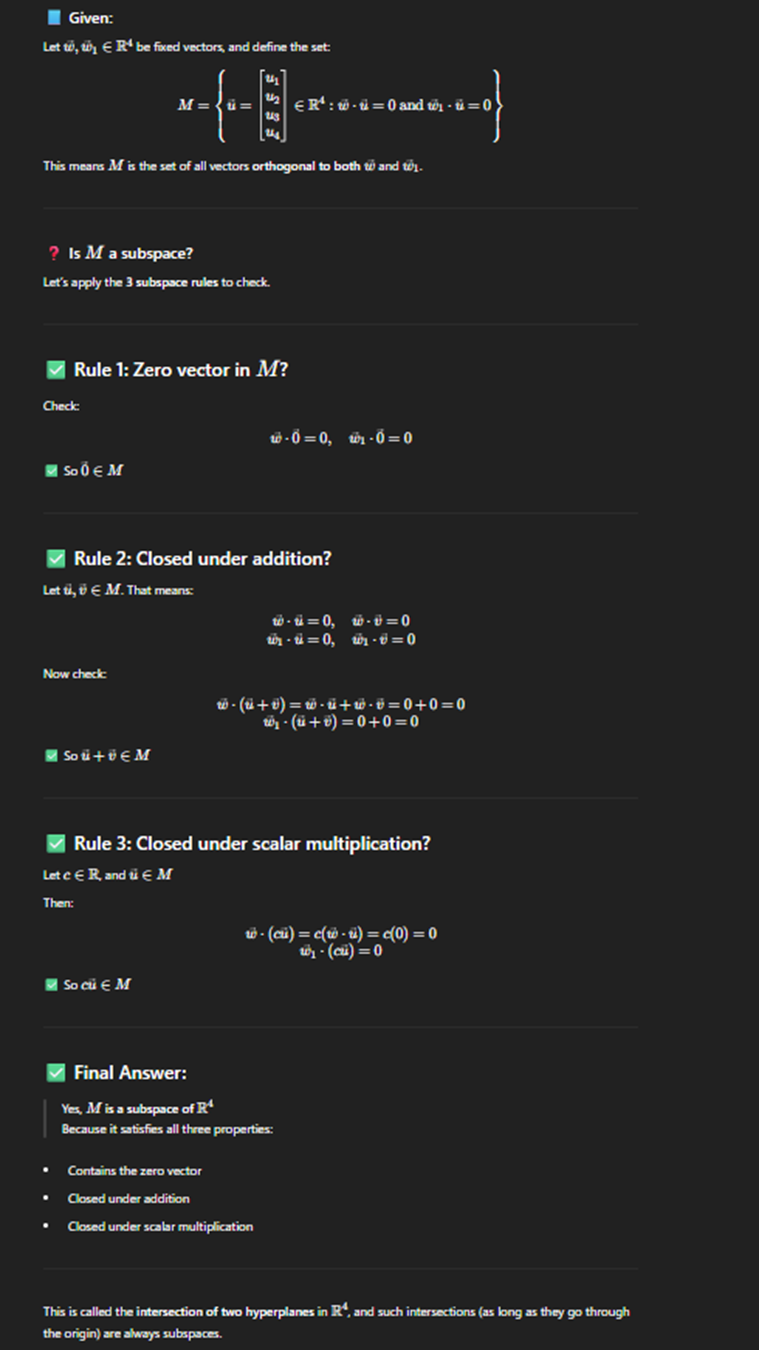
Solvign subspace 2 (remmerb is a supspace then linearly indpendent)
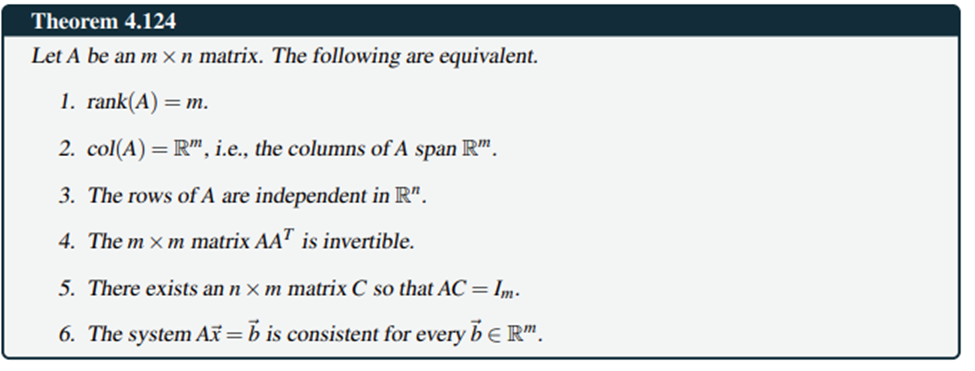
Rank of a matrix
Row Space
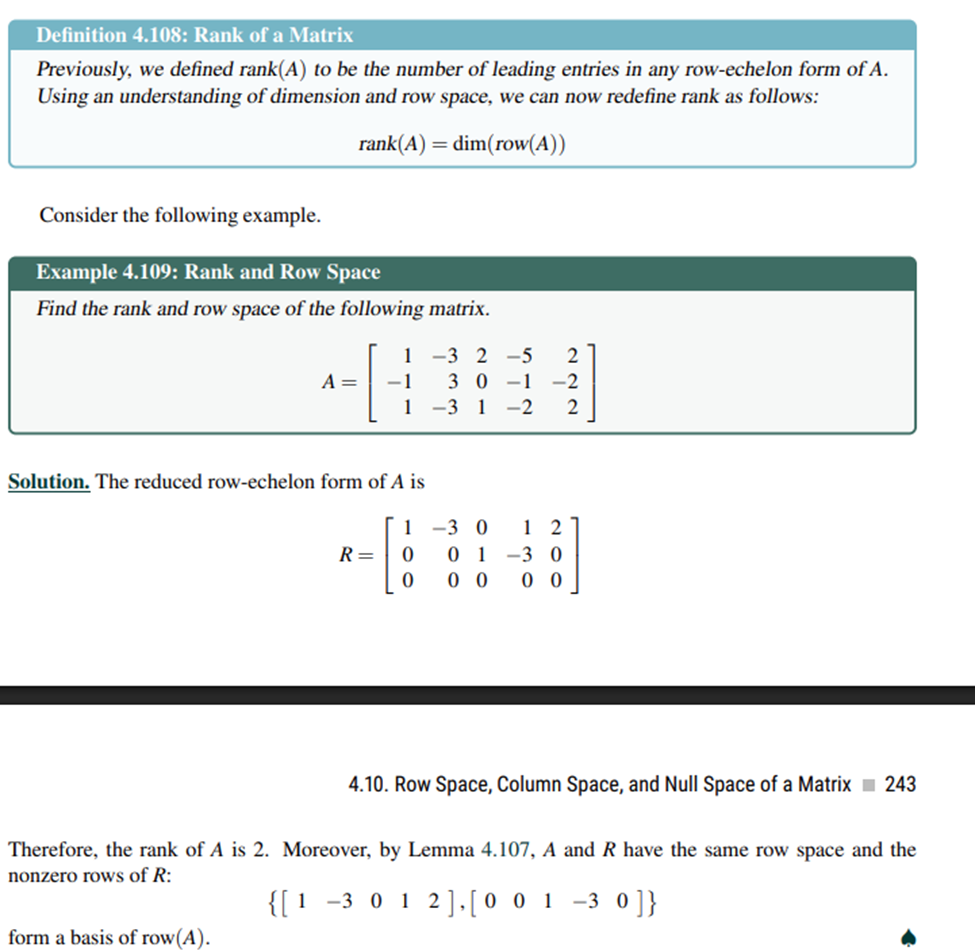
Any row that has a pivot colum is part of teh row space
Column space
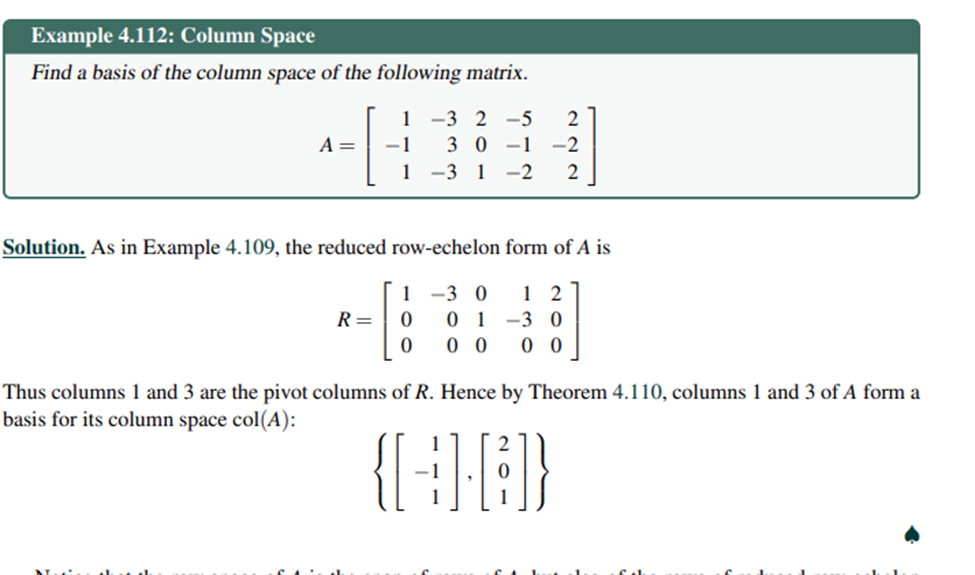
Any column that has a pivot column is part of column space
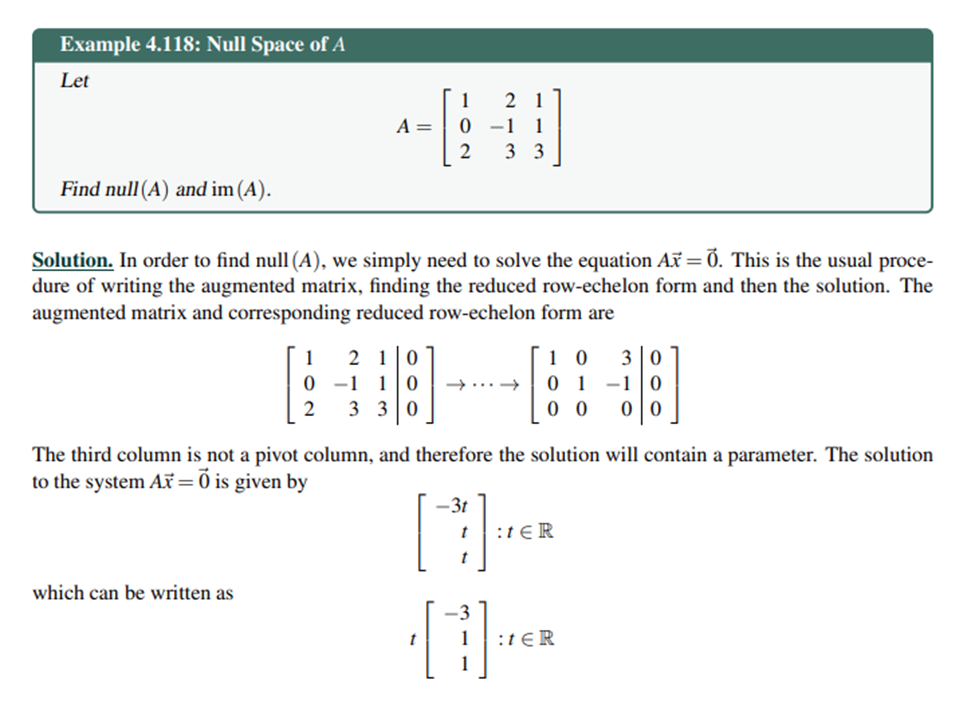
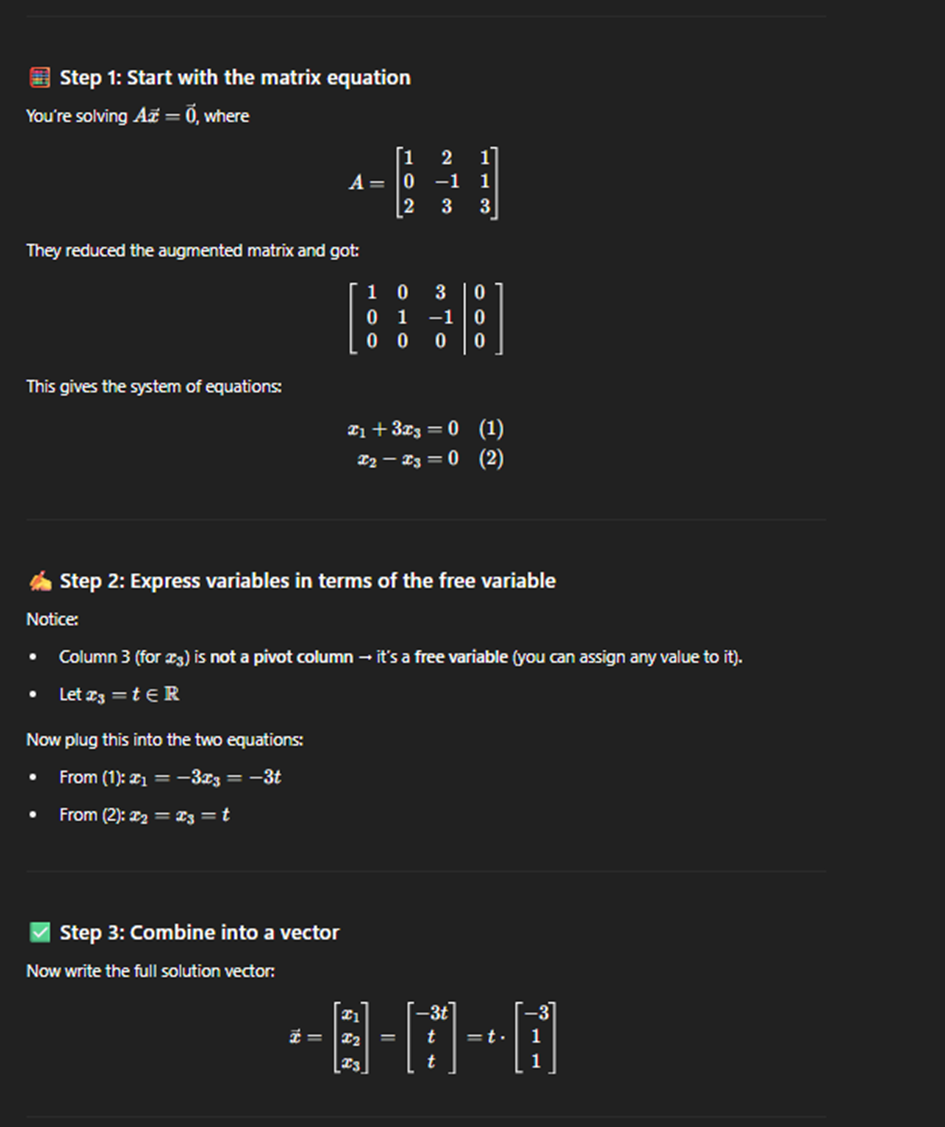
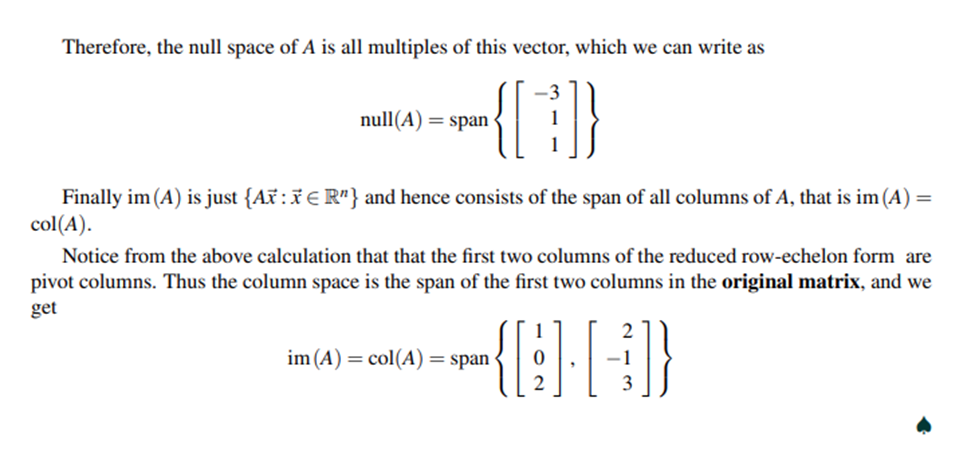
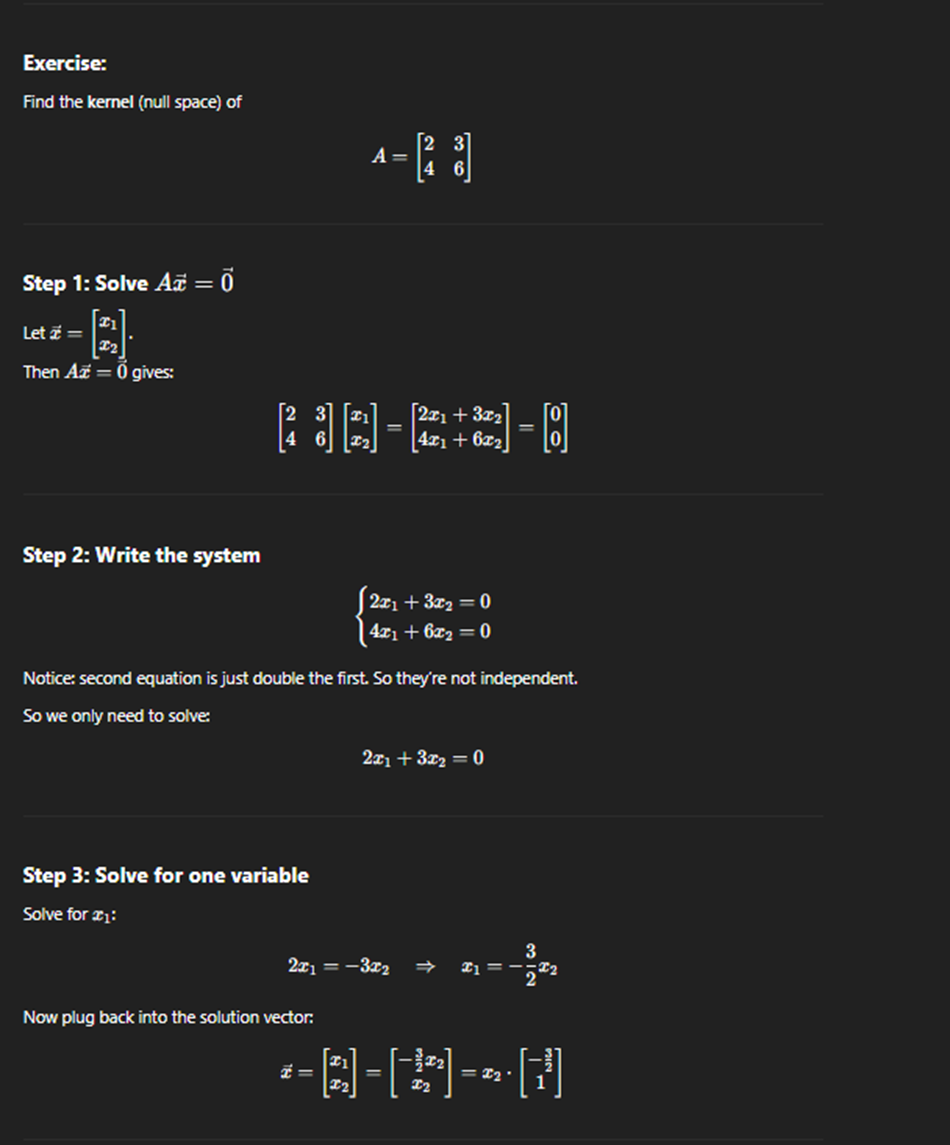
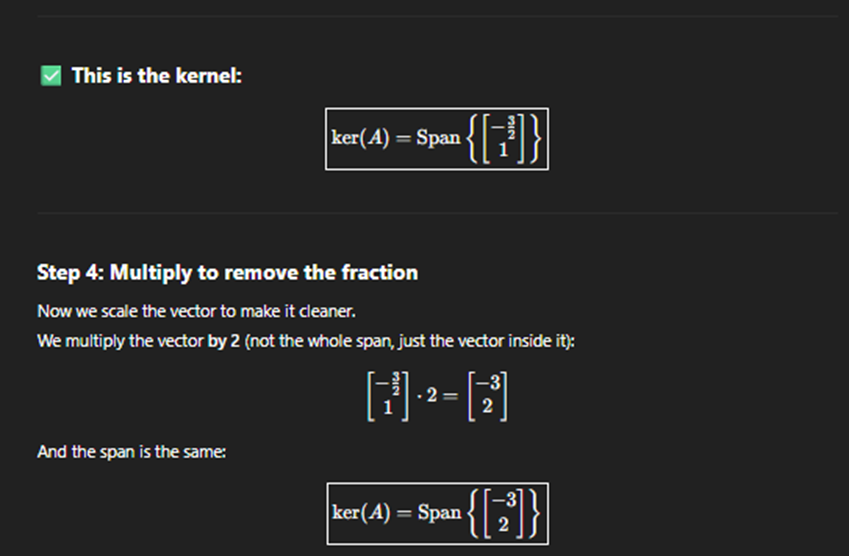
null space or kernal space
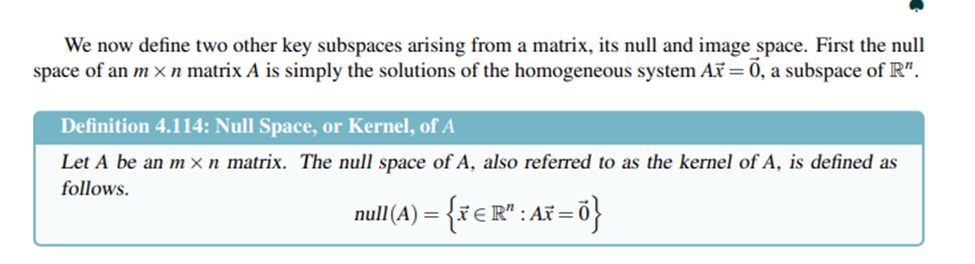
what multplied by A gives us 0
Rules of row space
rules for column space
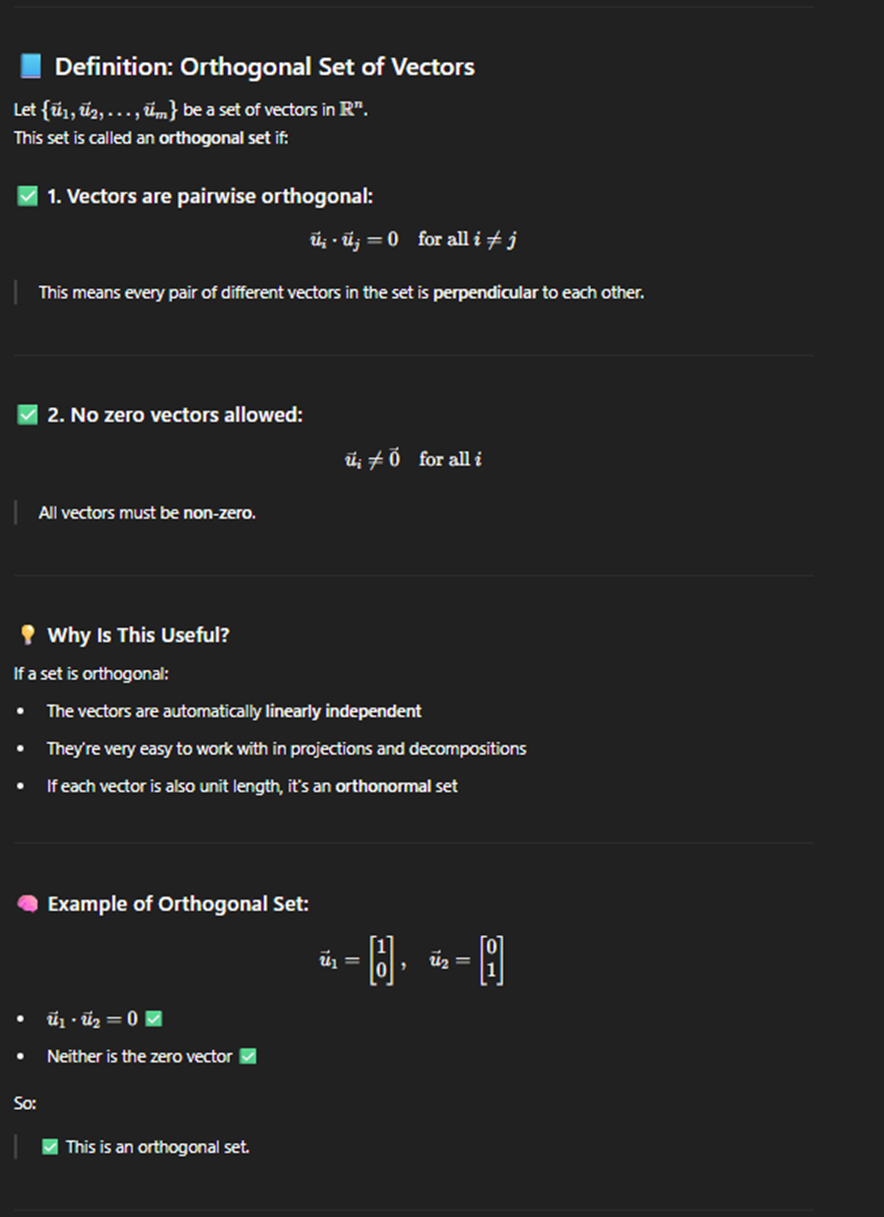
Orthogonal set
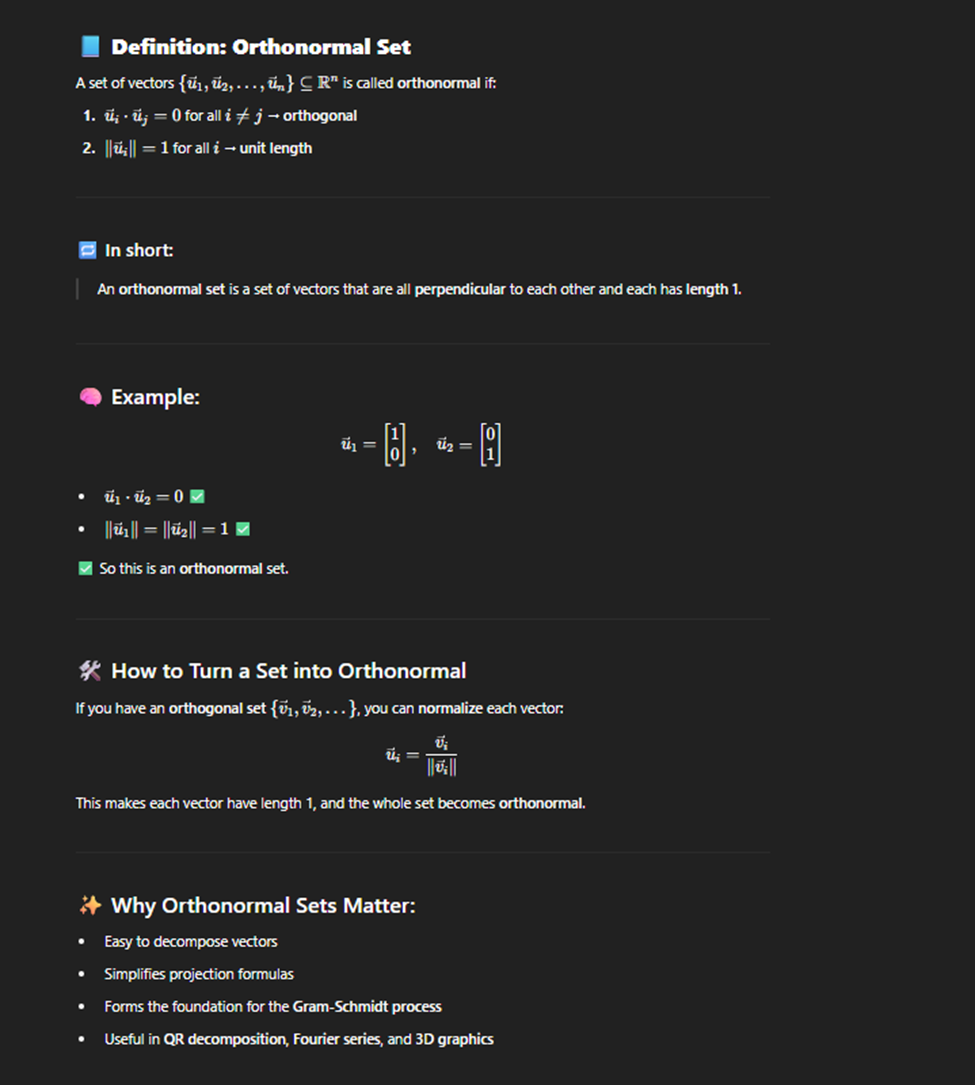
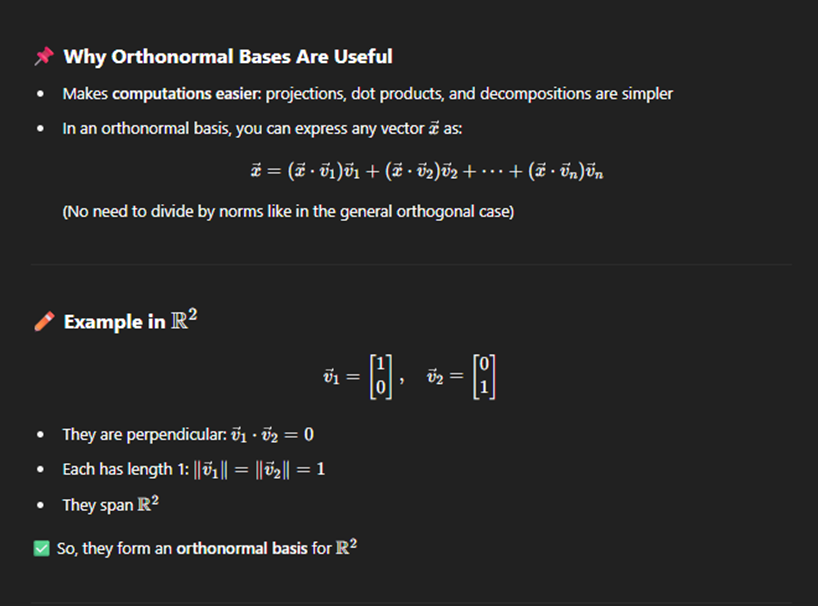
Orothornamal set
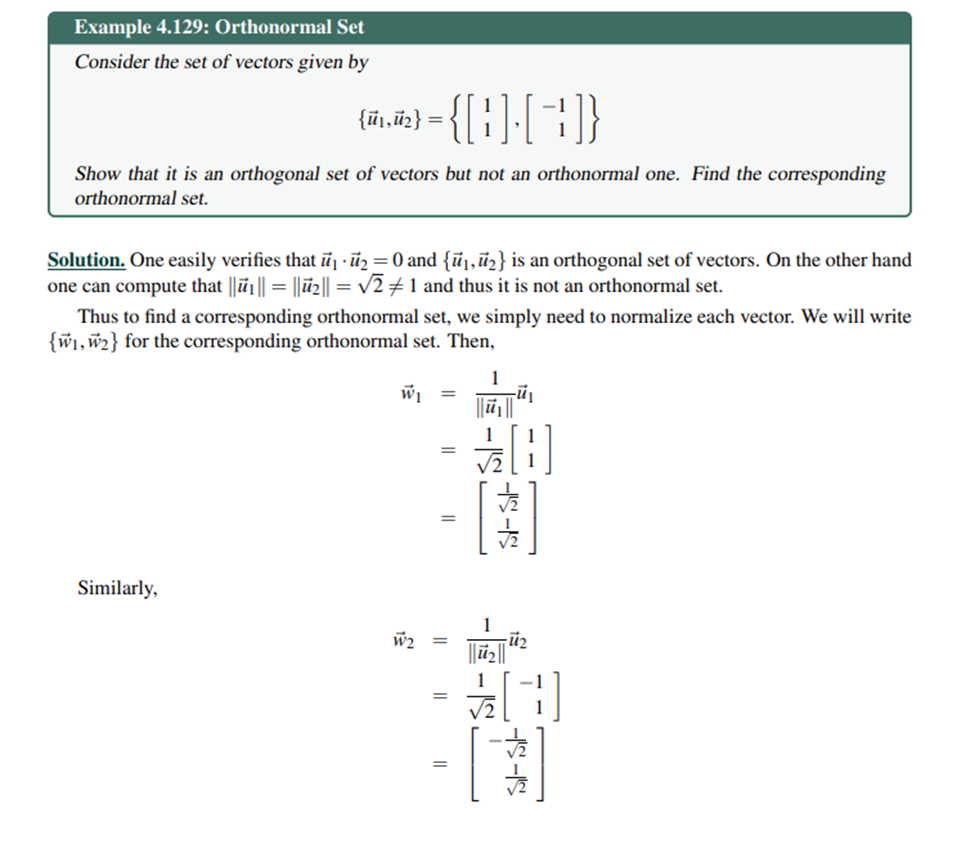
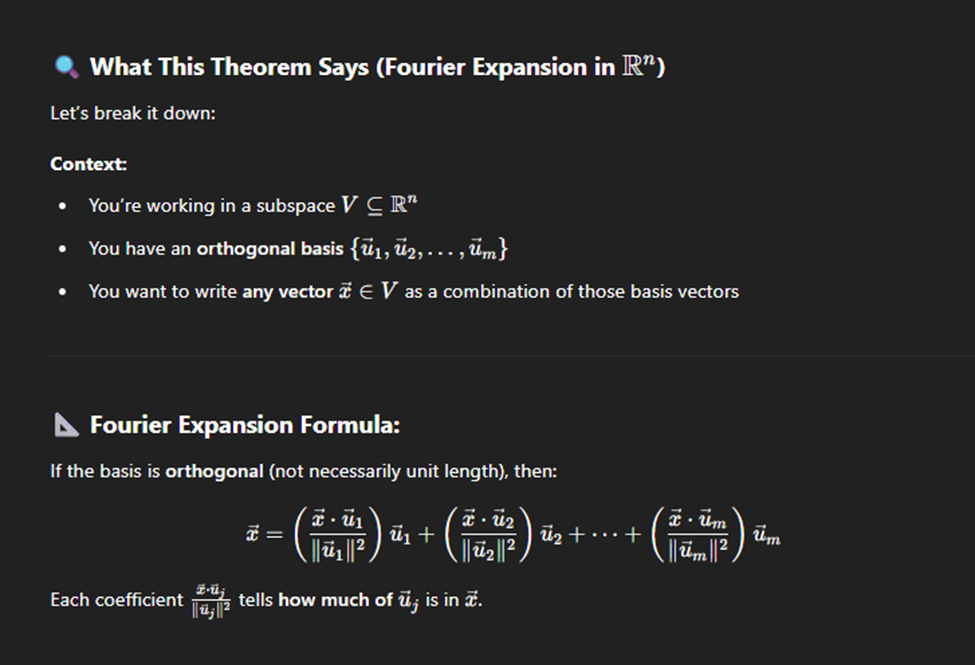
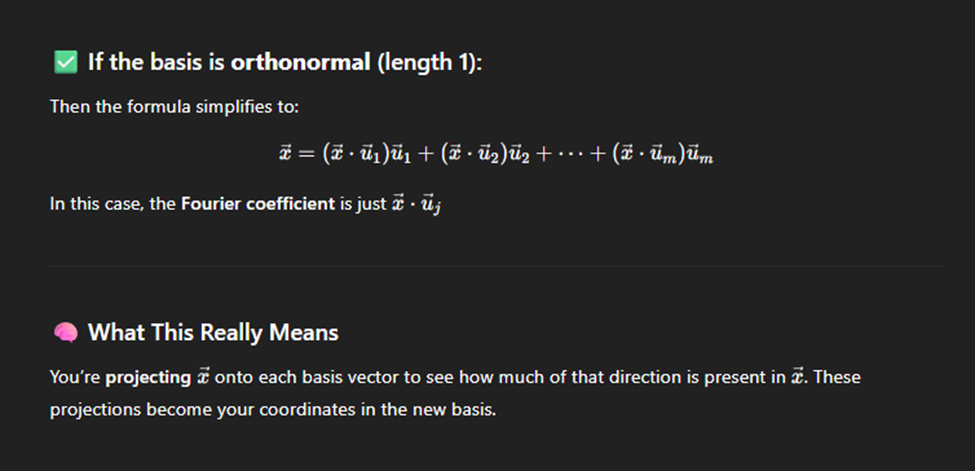
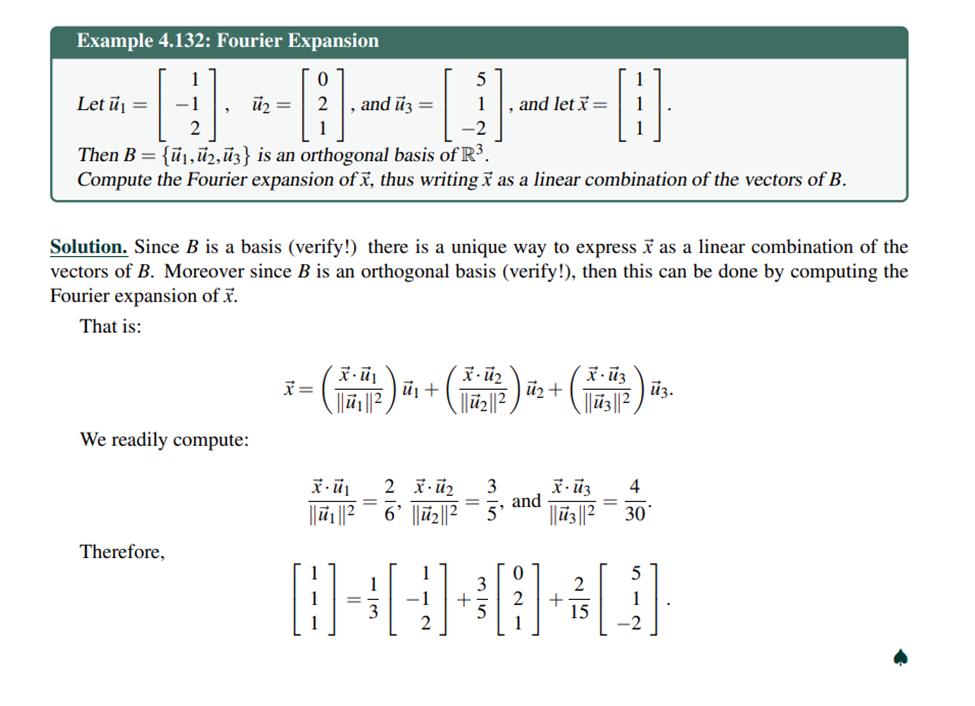
Fourier expansion
Orothogonal matrixes

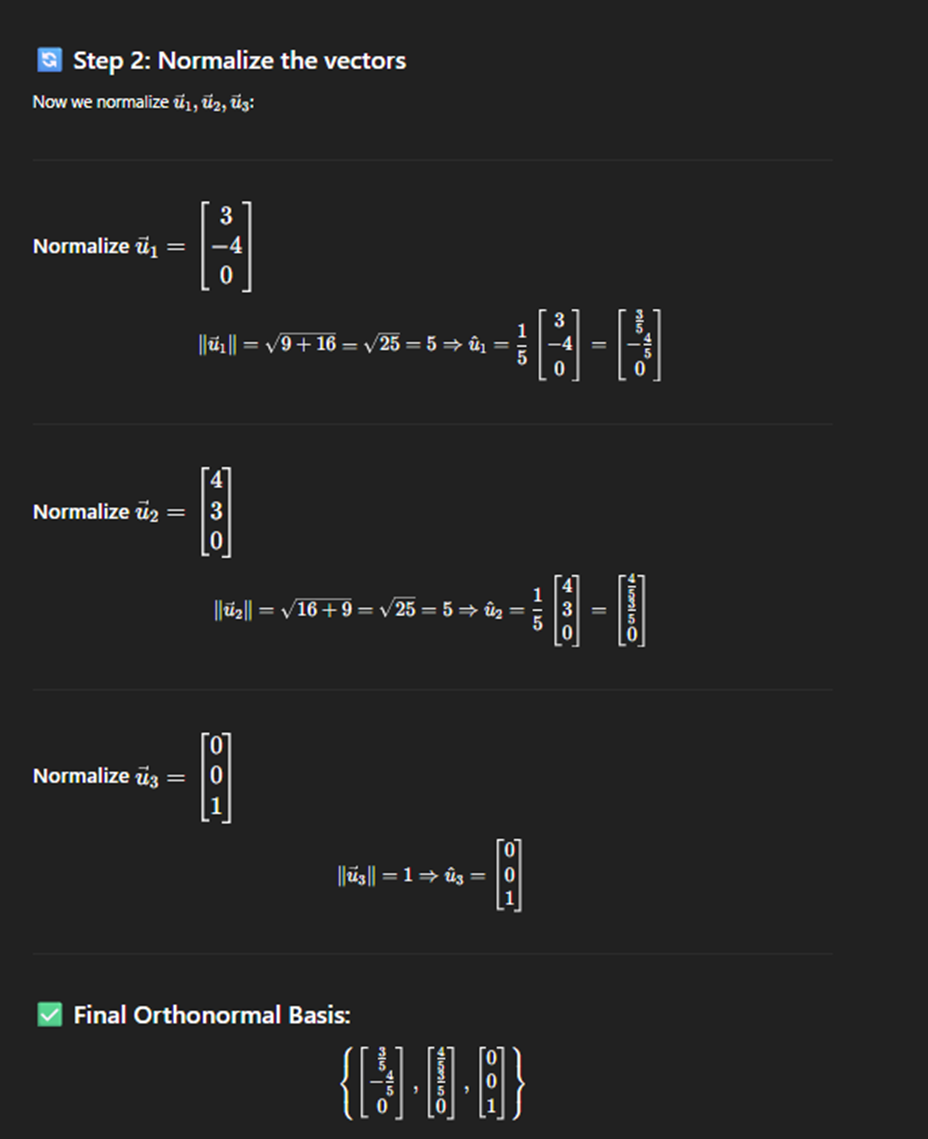
Orthornamal basis

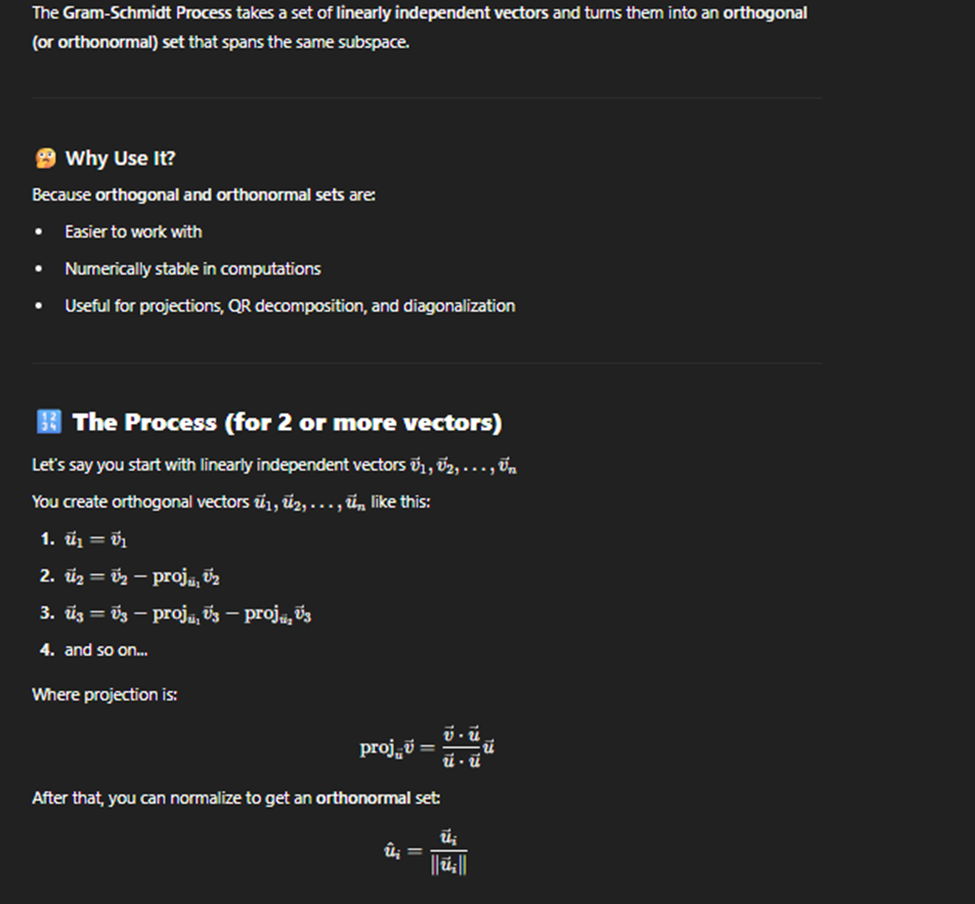
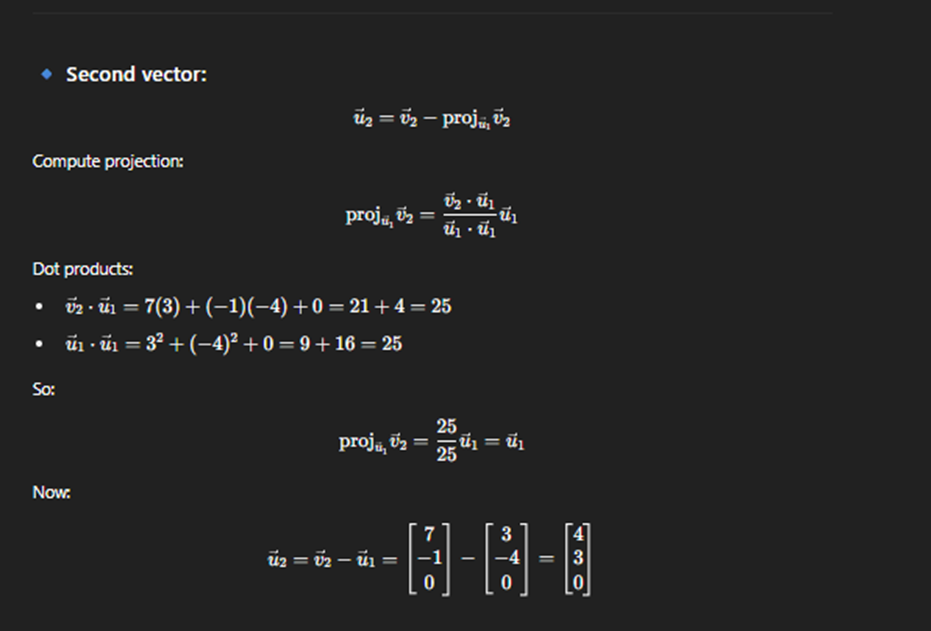
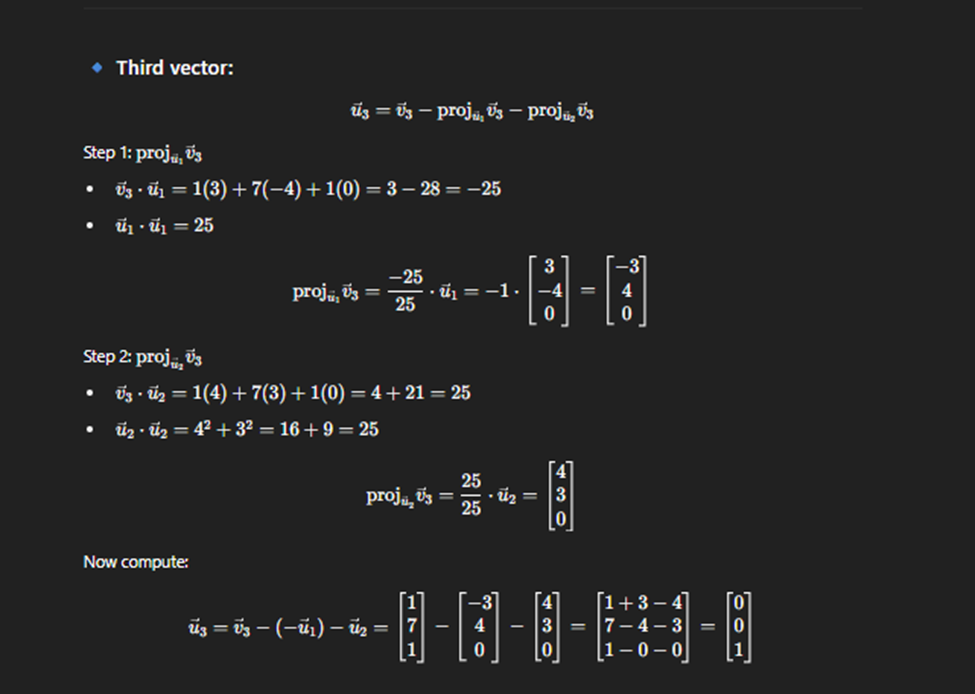
Grand smit processs
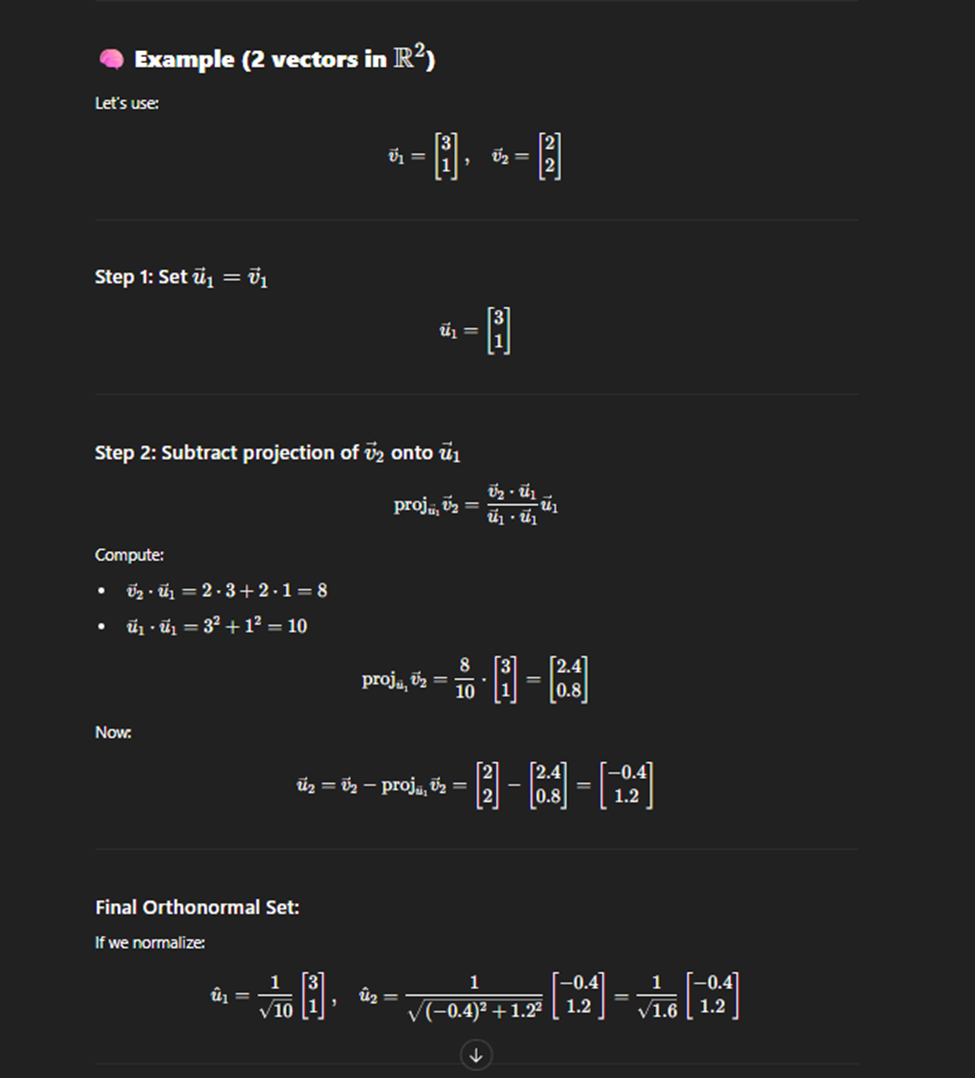
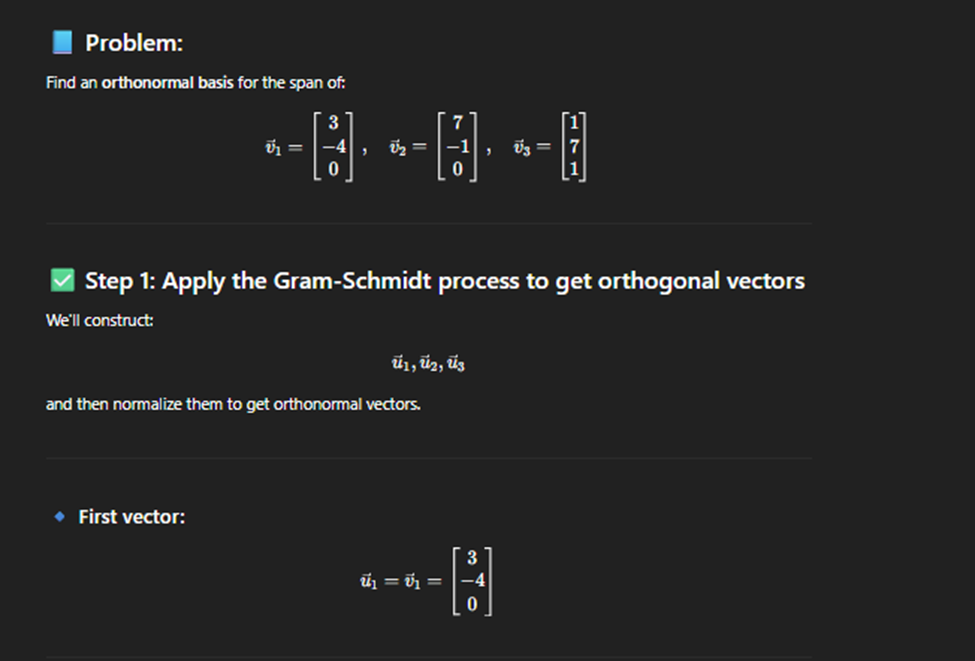
Finding orhtornomal basis
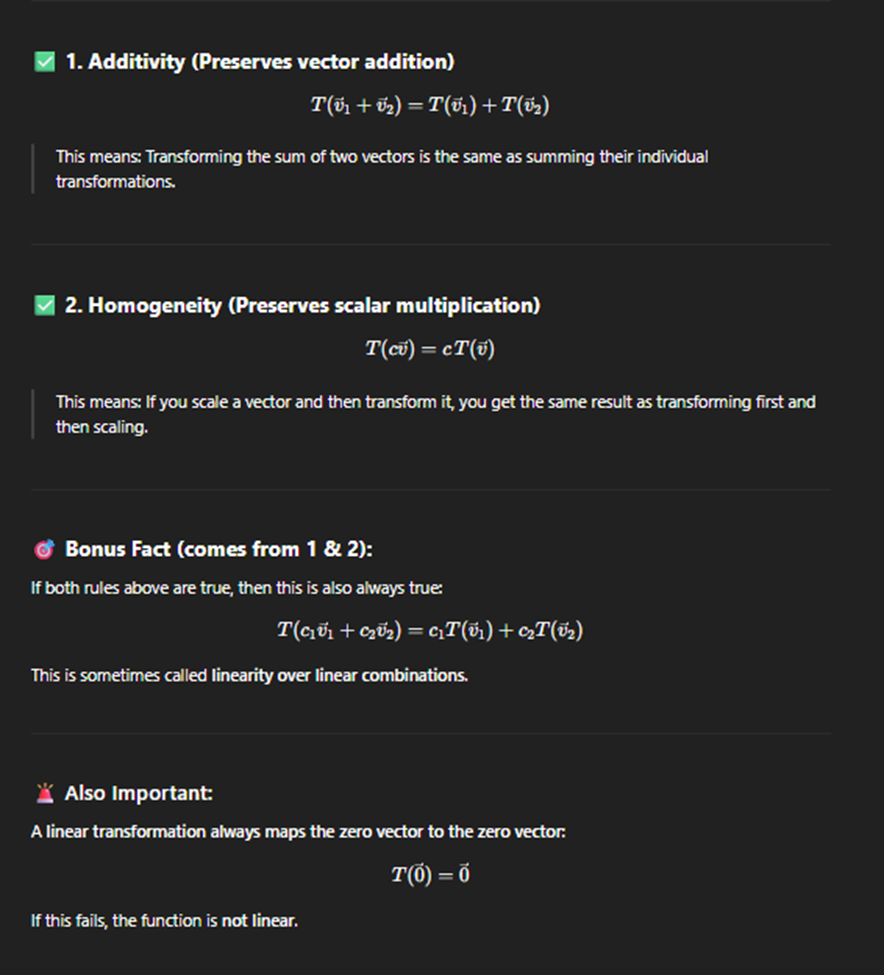
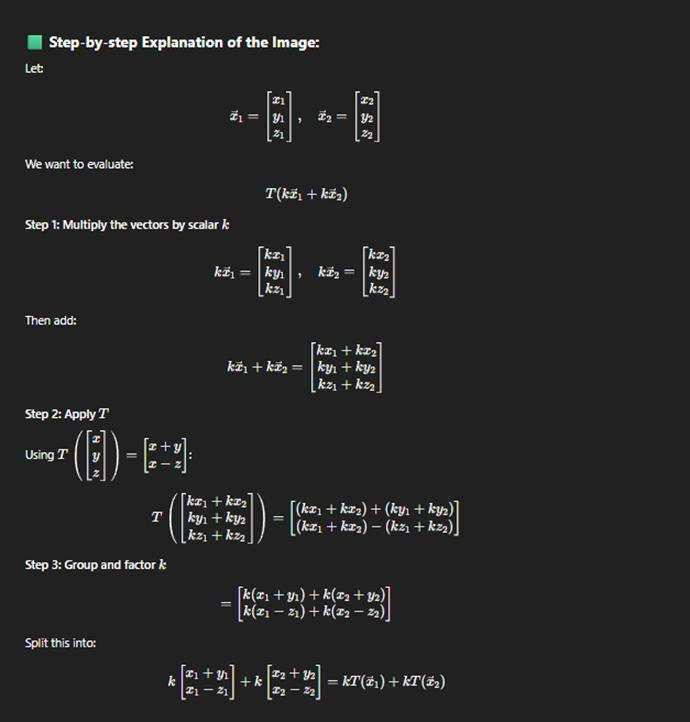
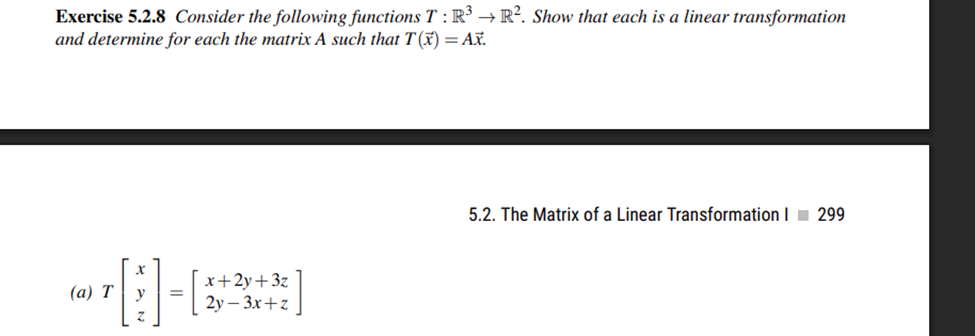
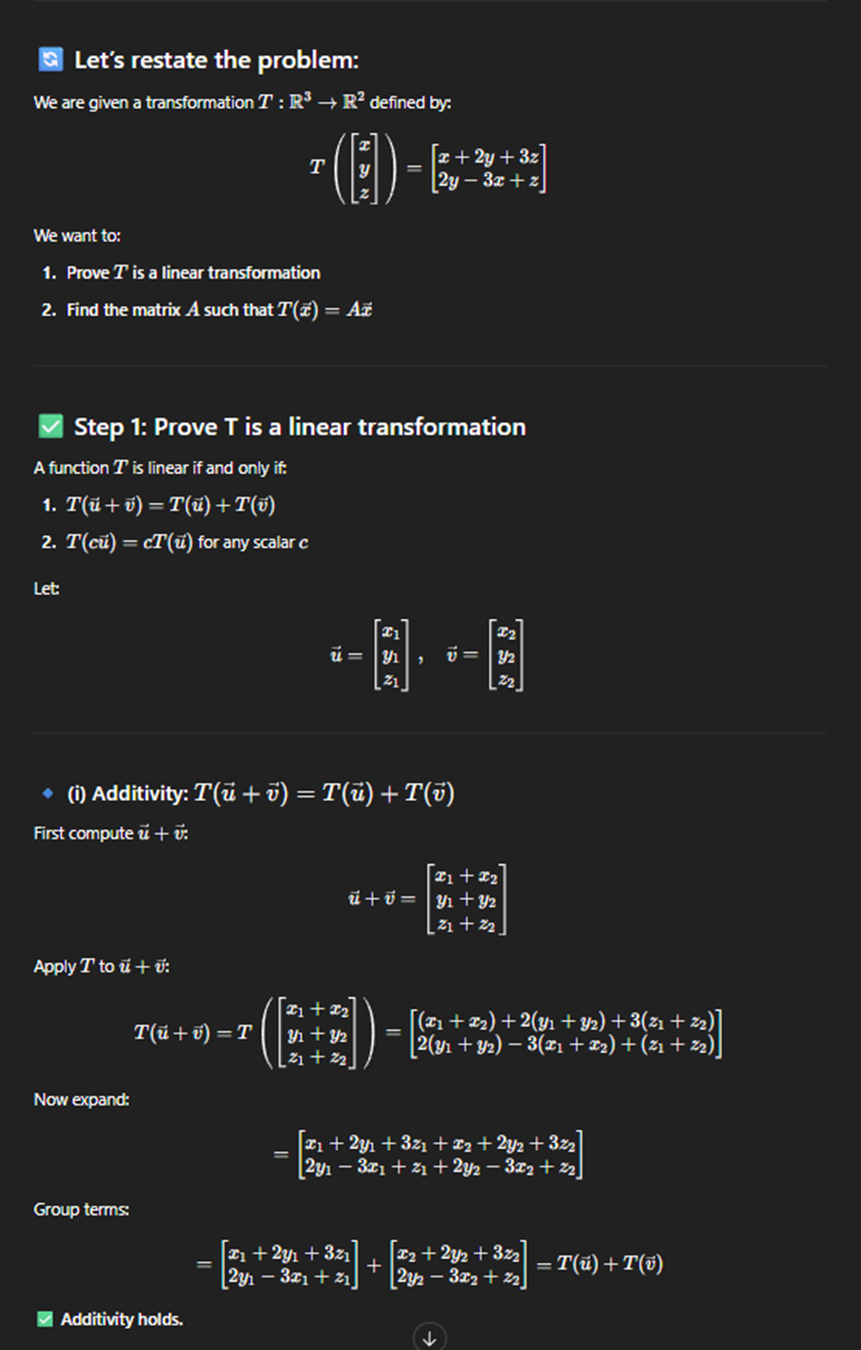
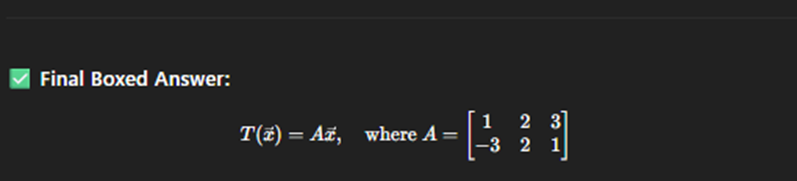
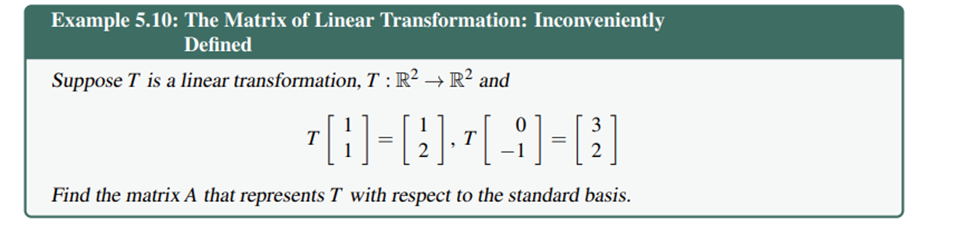
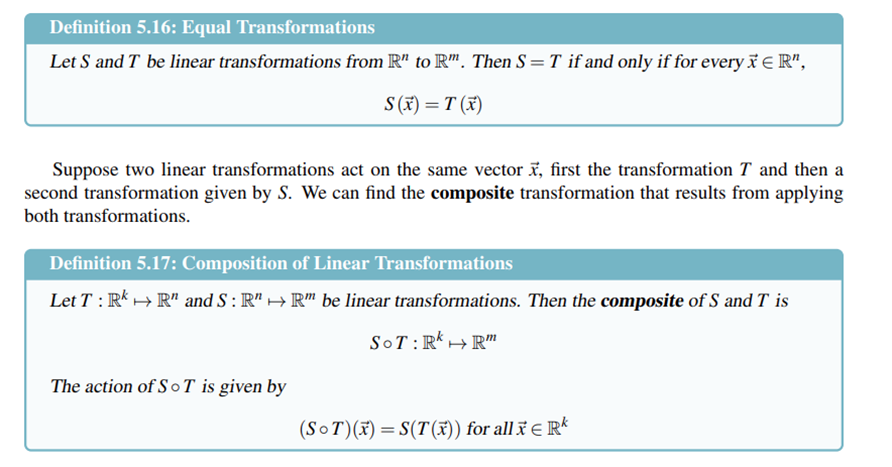
Linear Transformation

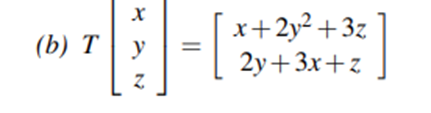
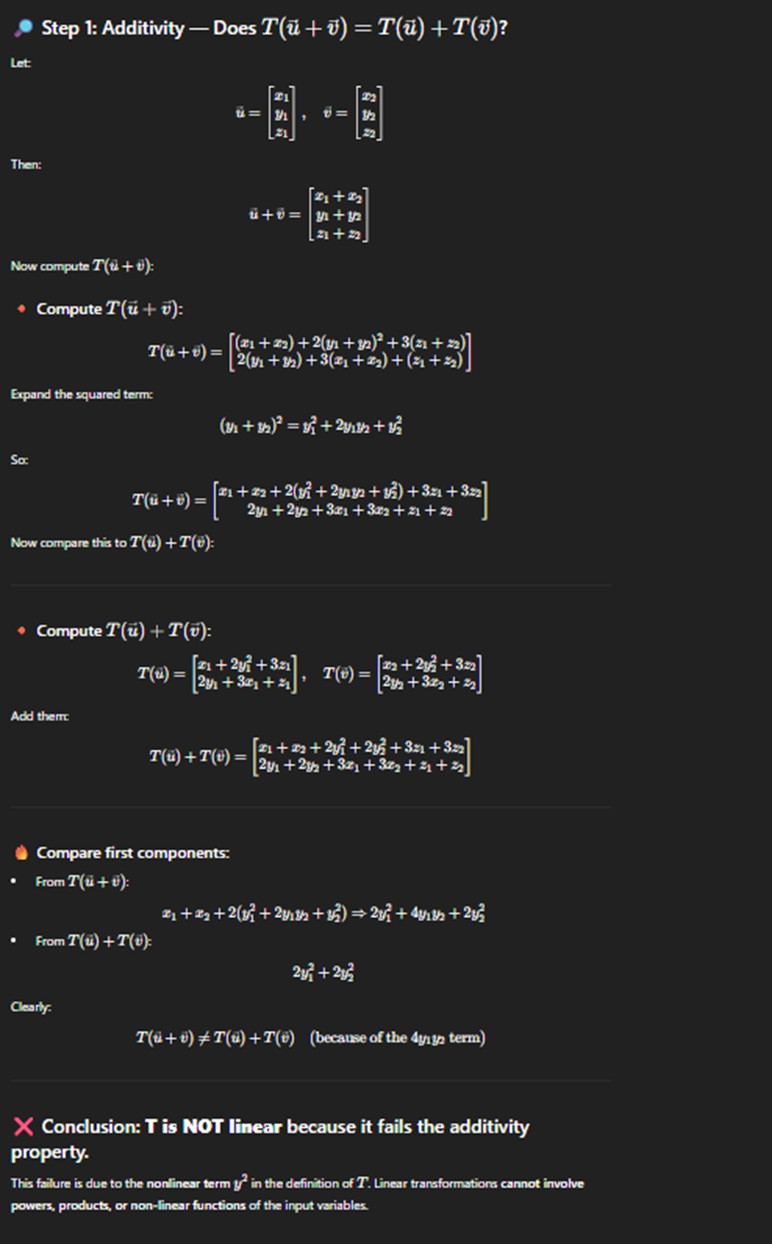
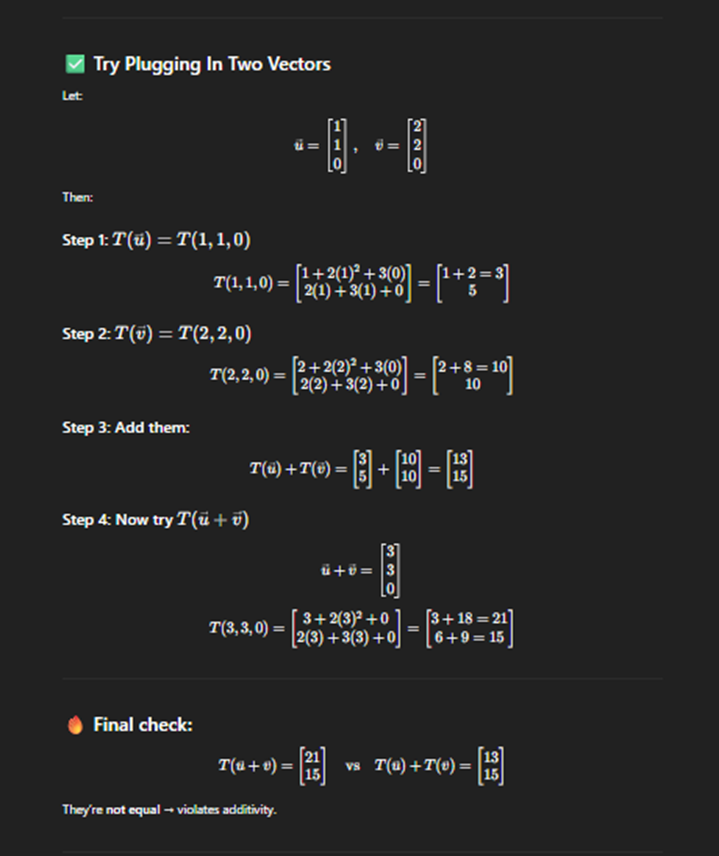
Transformatin not linear
Linear trnasformation and projection
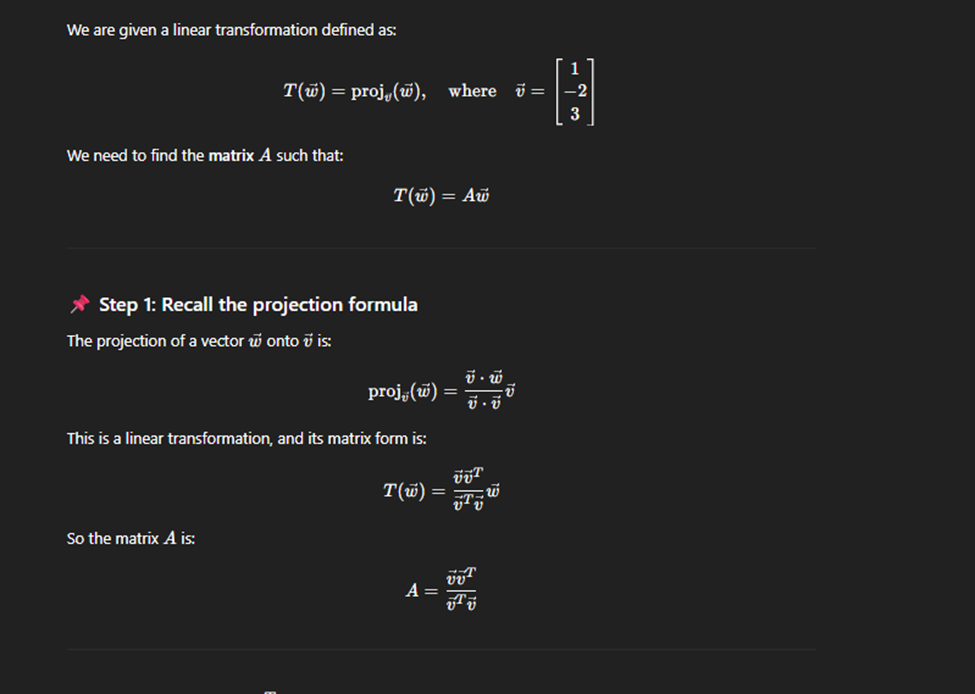
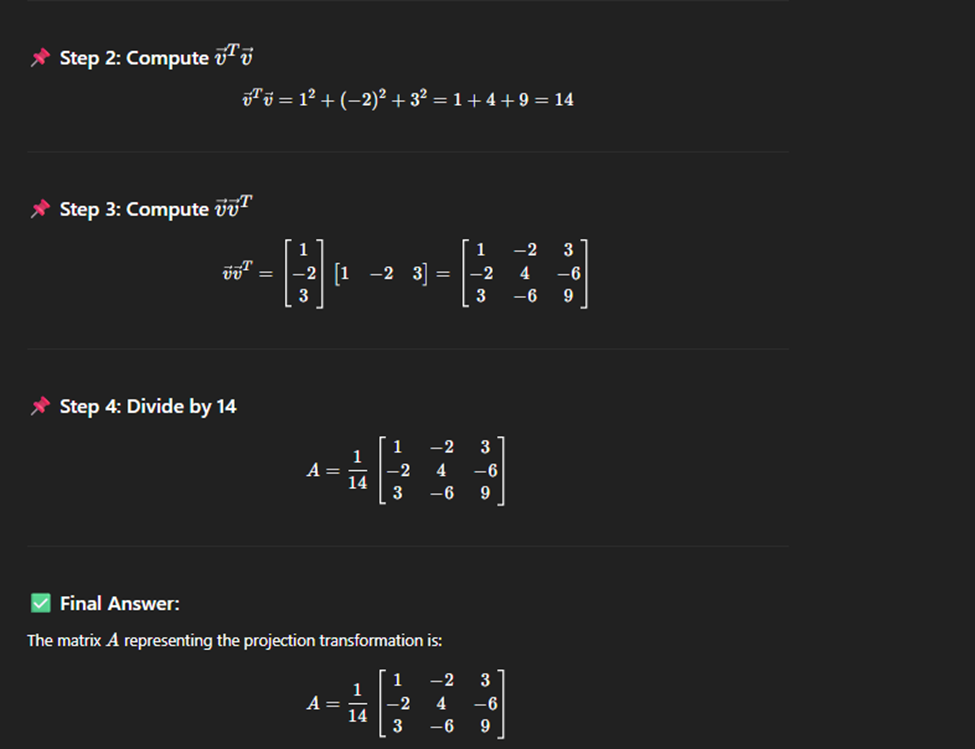
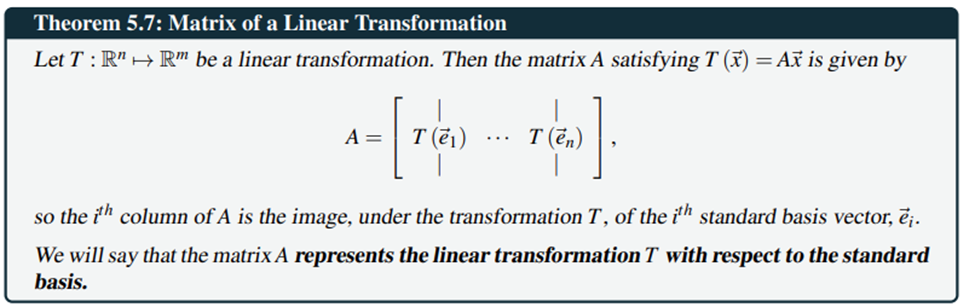
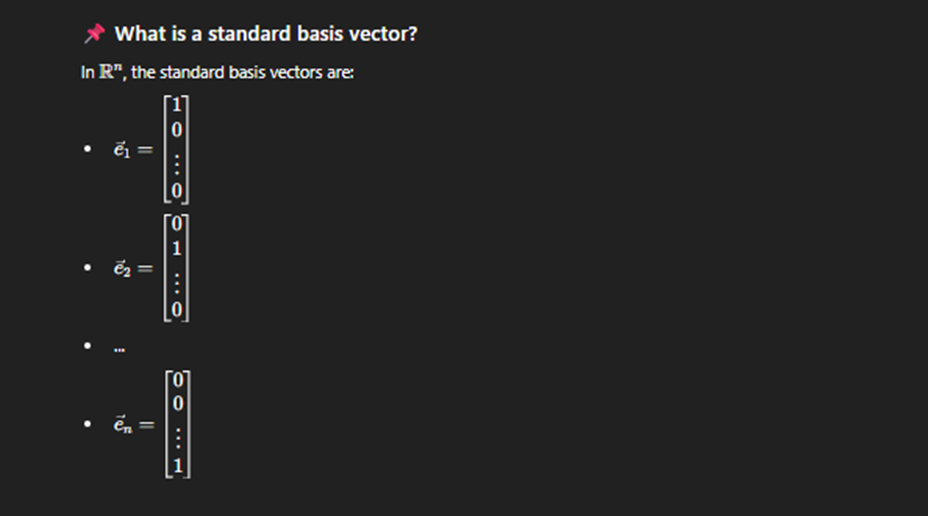
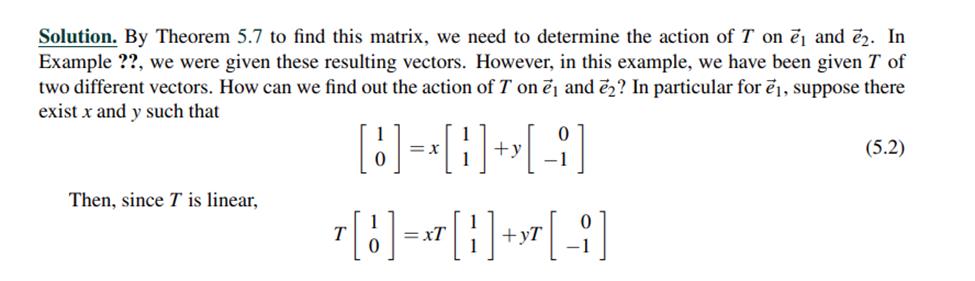
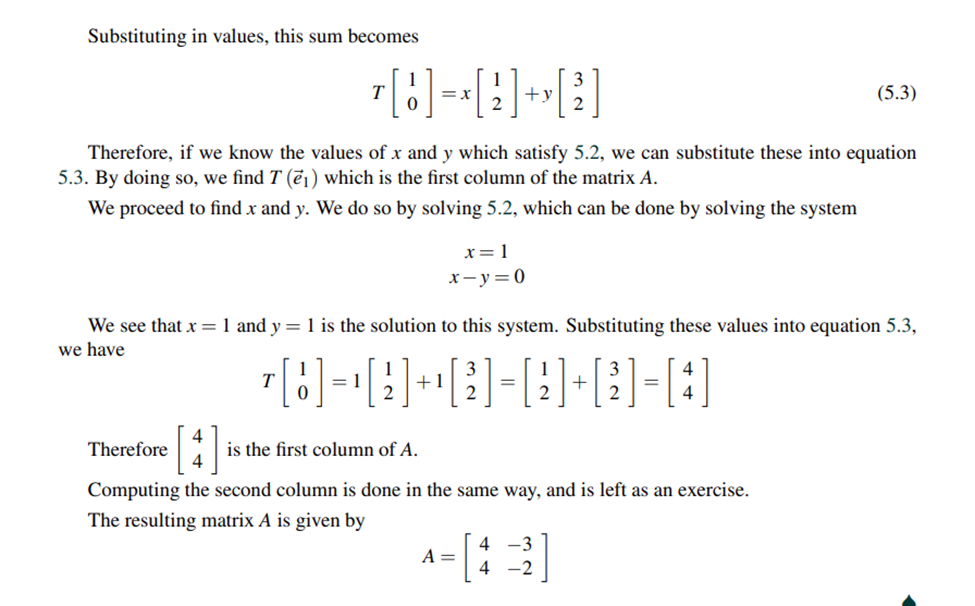
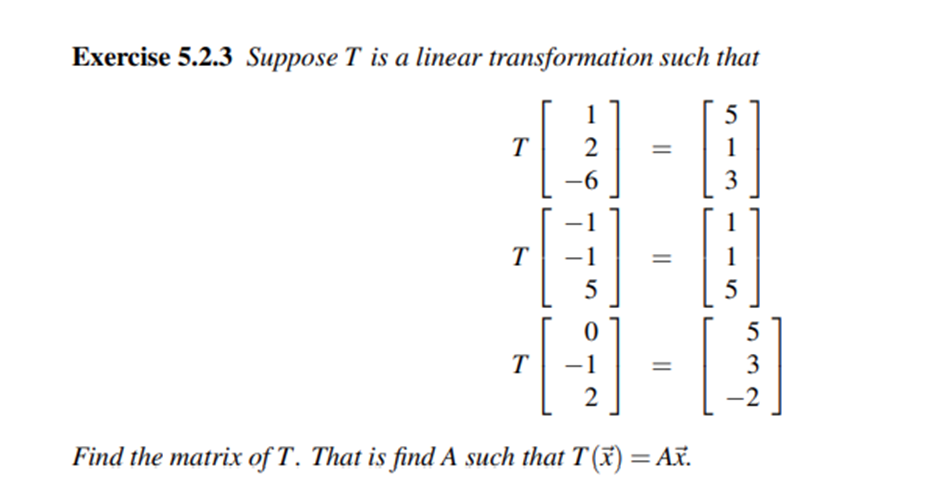
Matrix of linear transformation
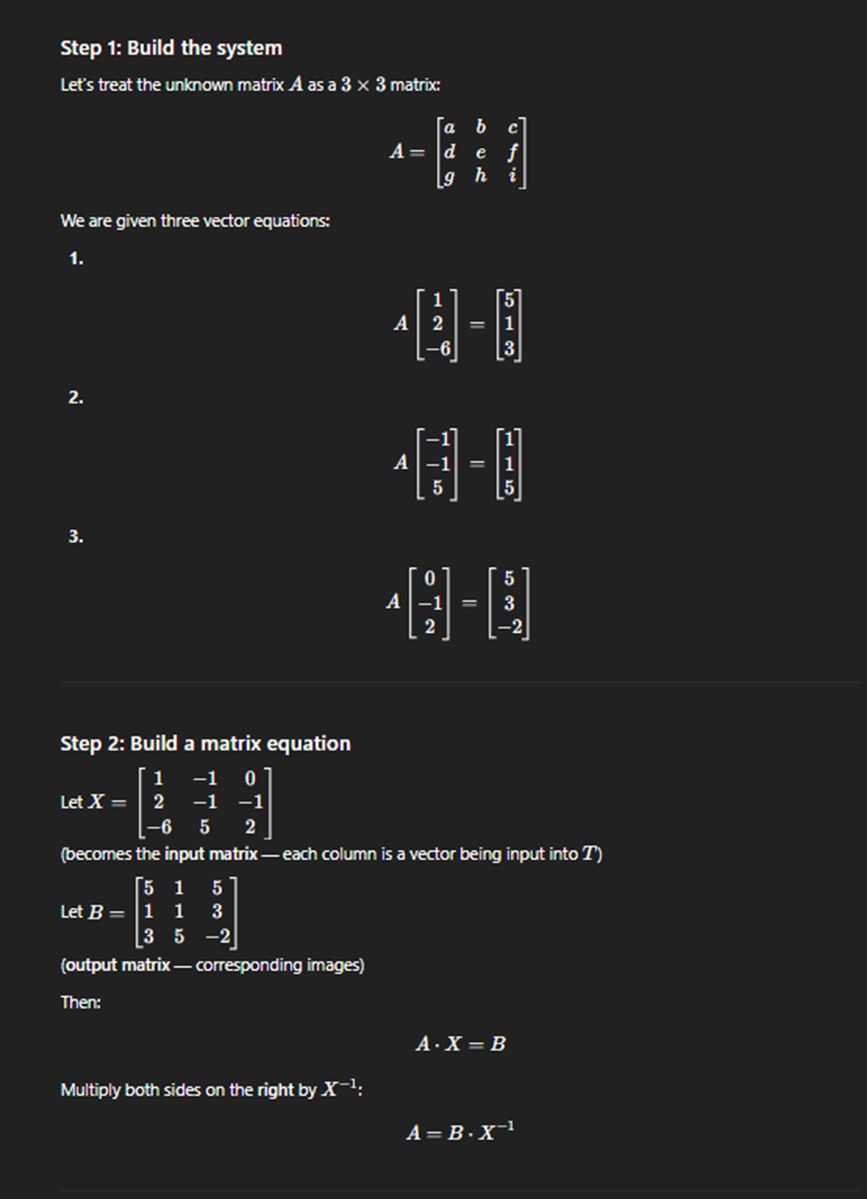
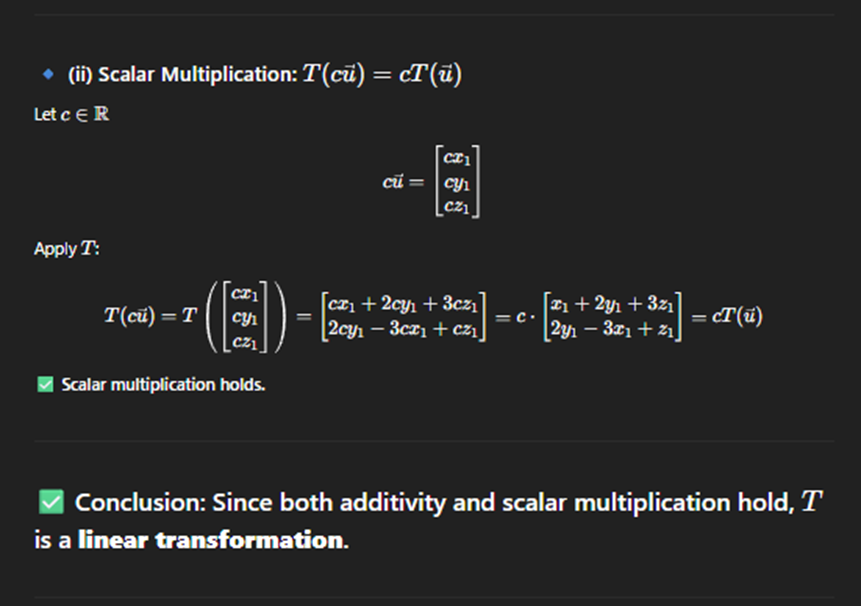
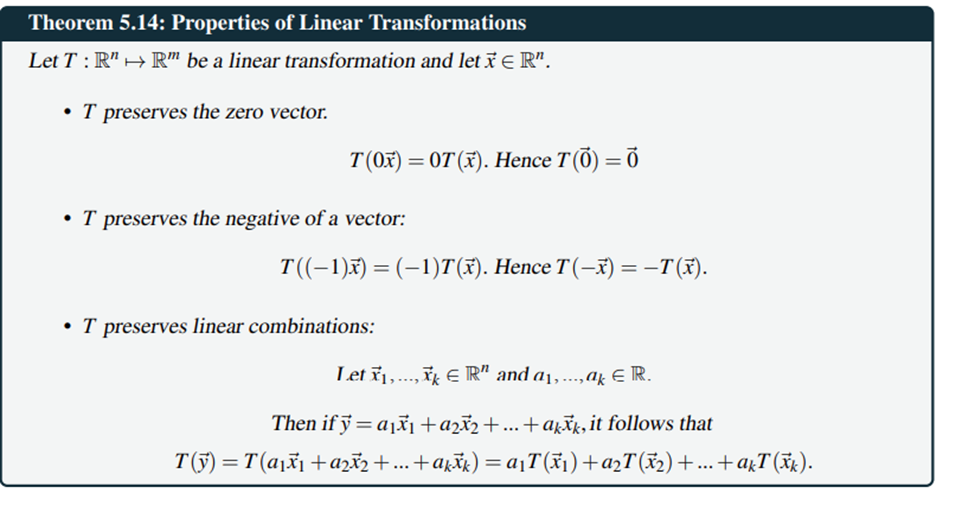
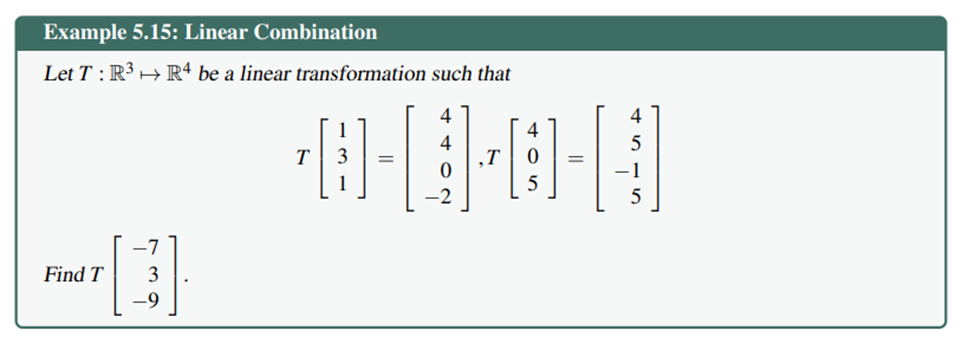
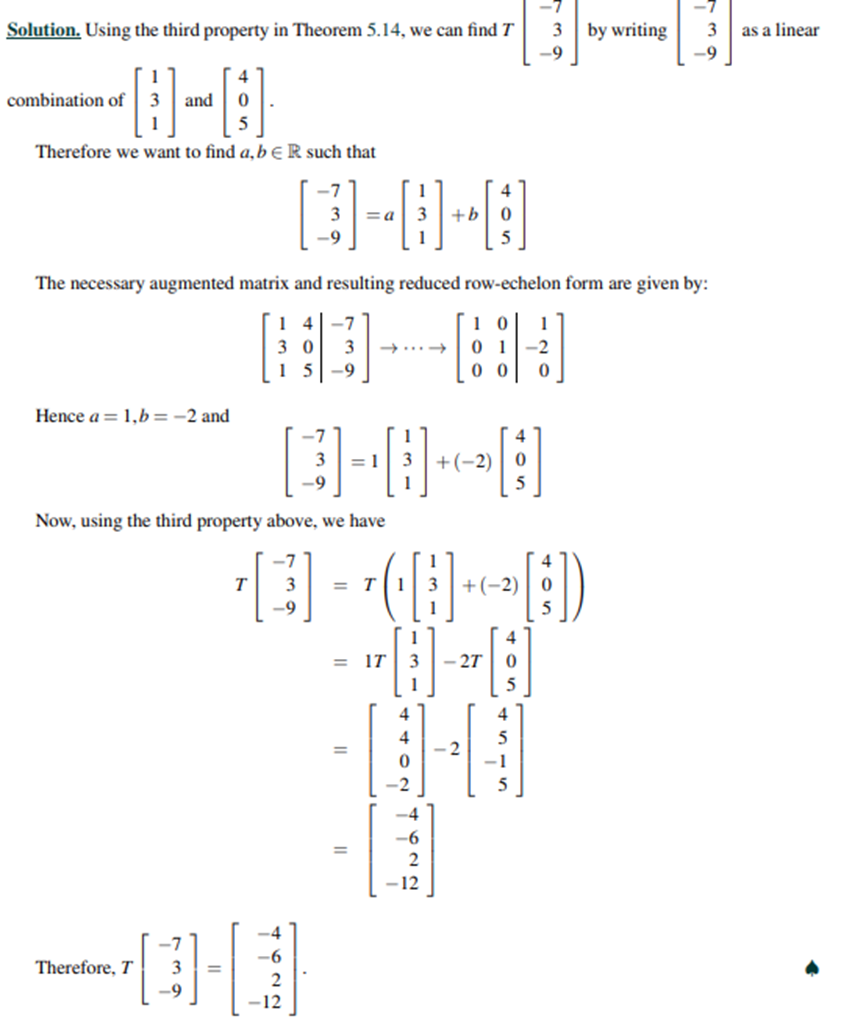
Properteis of Linear Transformation
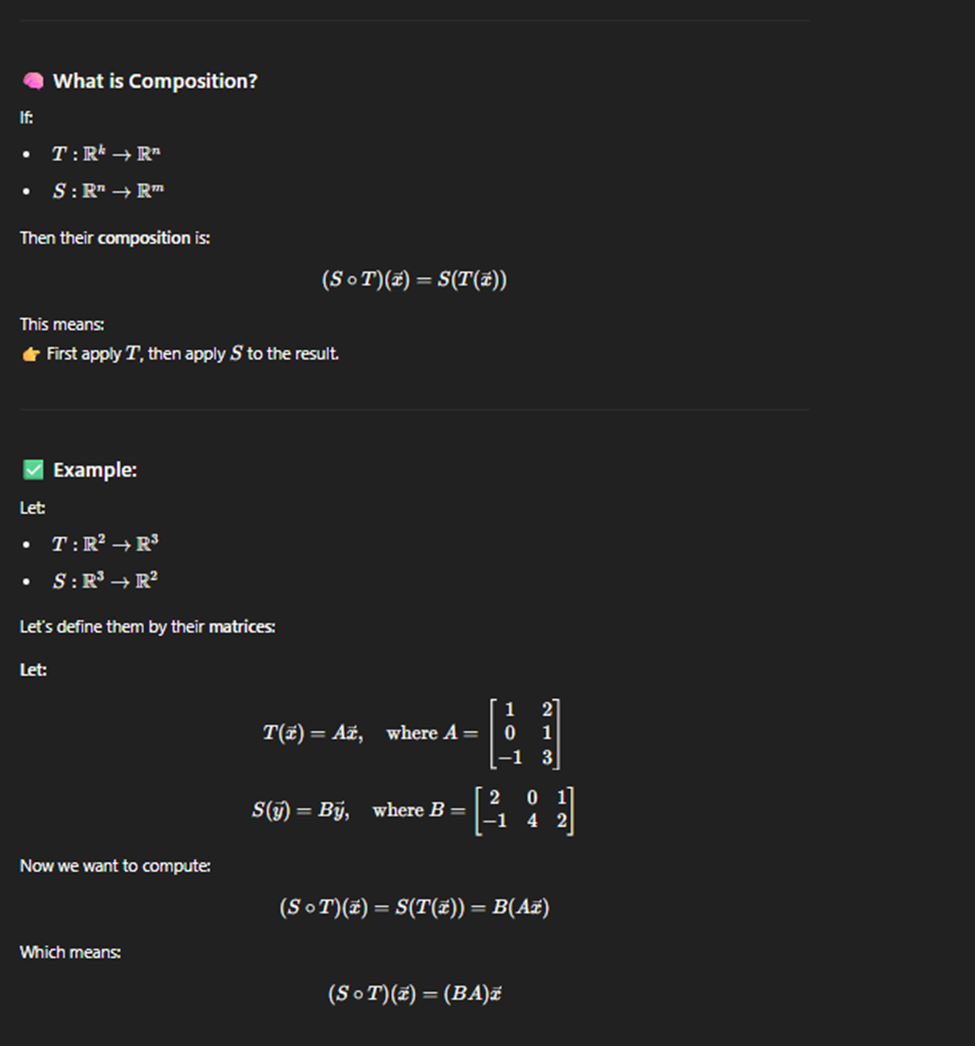
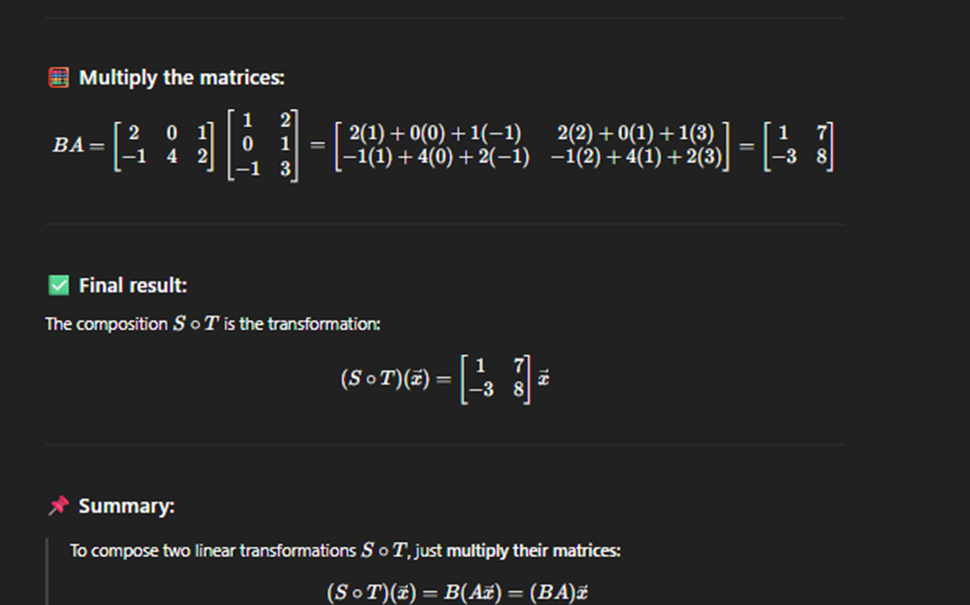
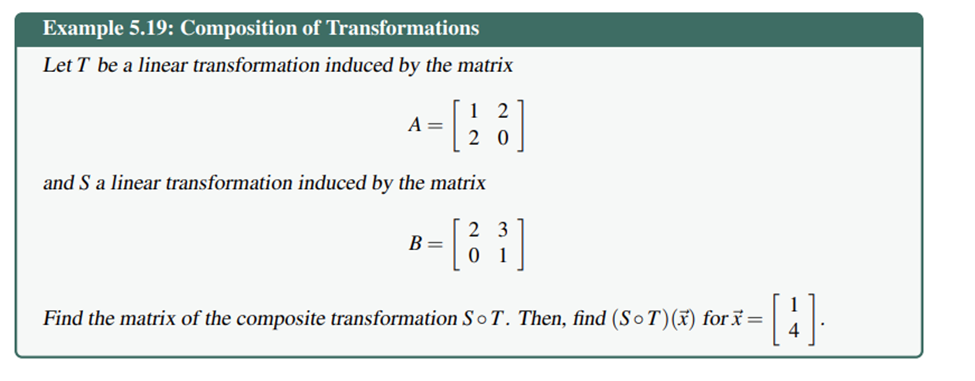
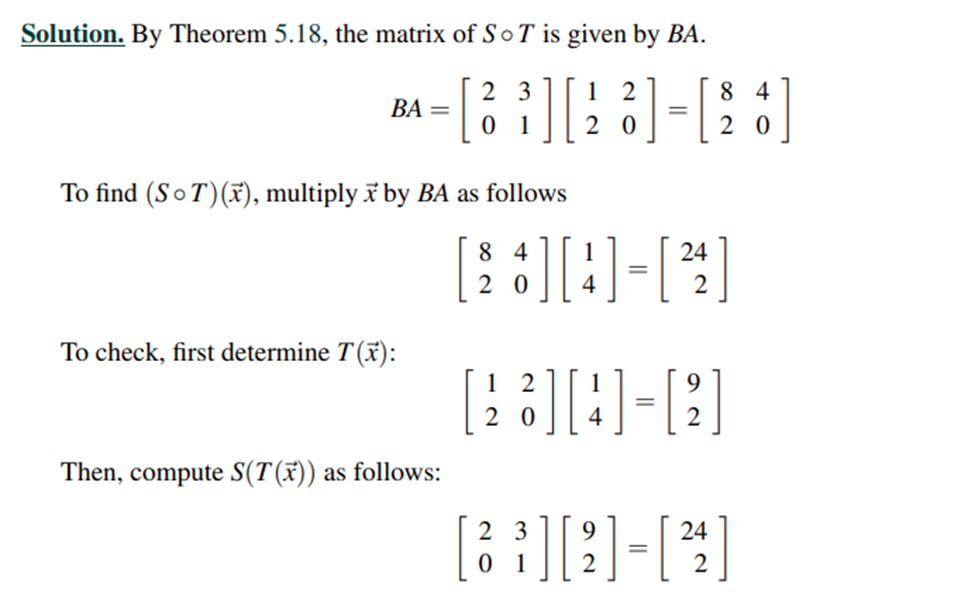
Composite of linear Transformation
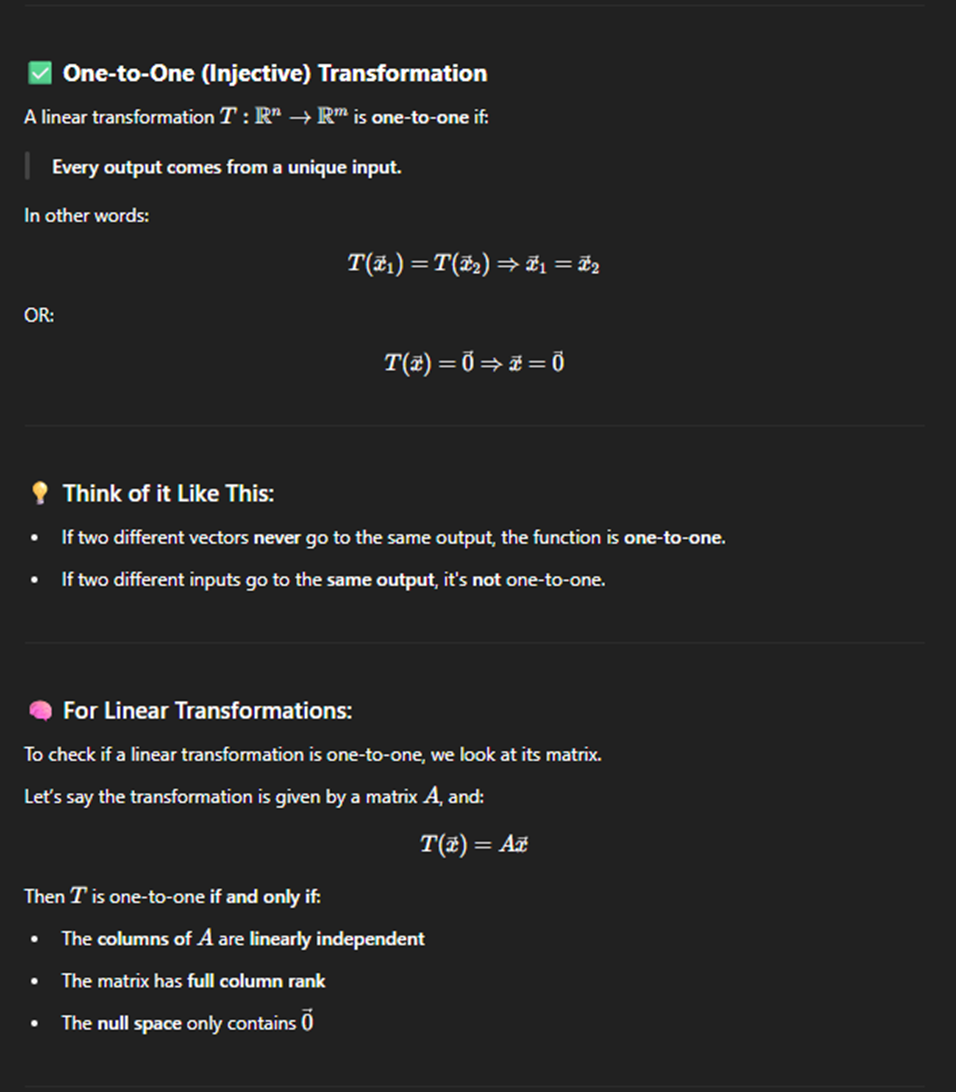
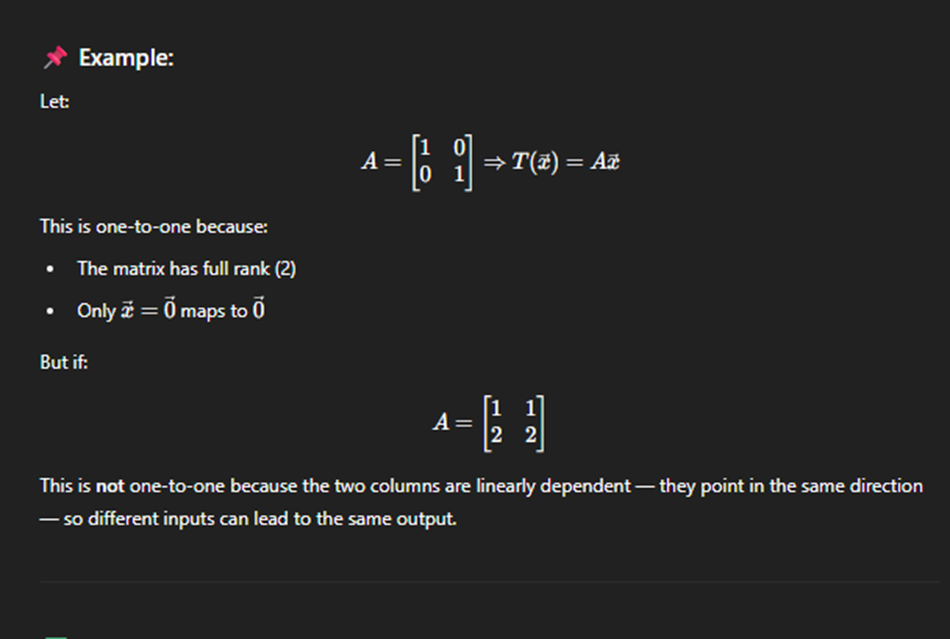
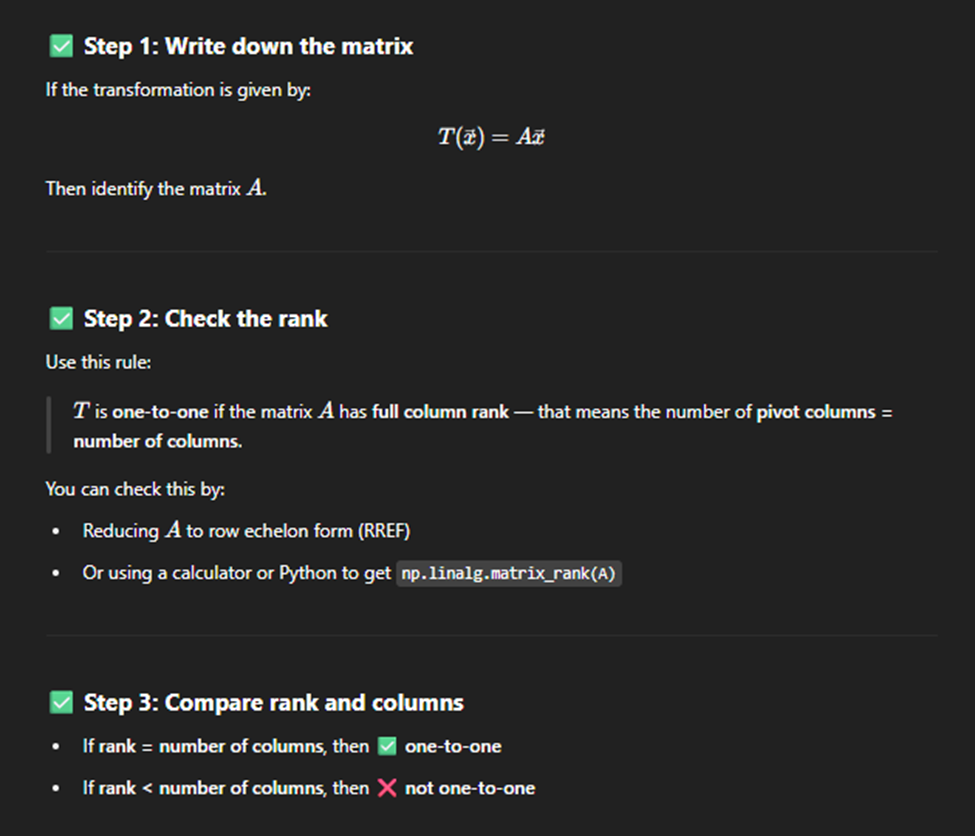
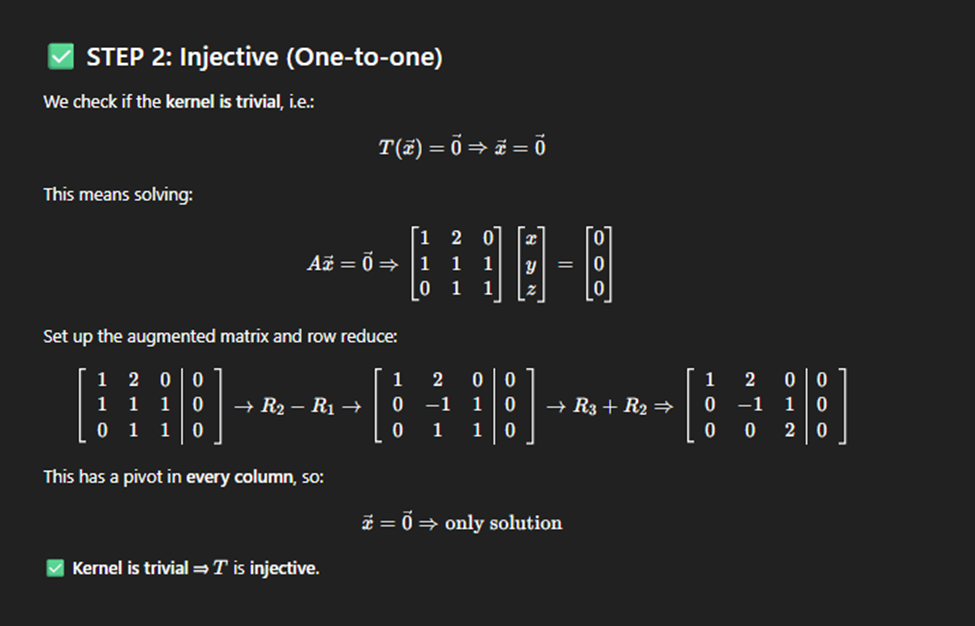
One to one Linear Transform
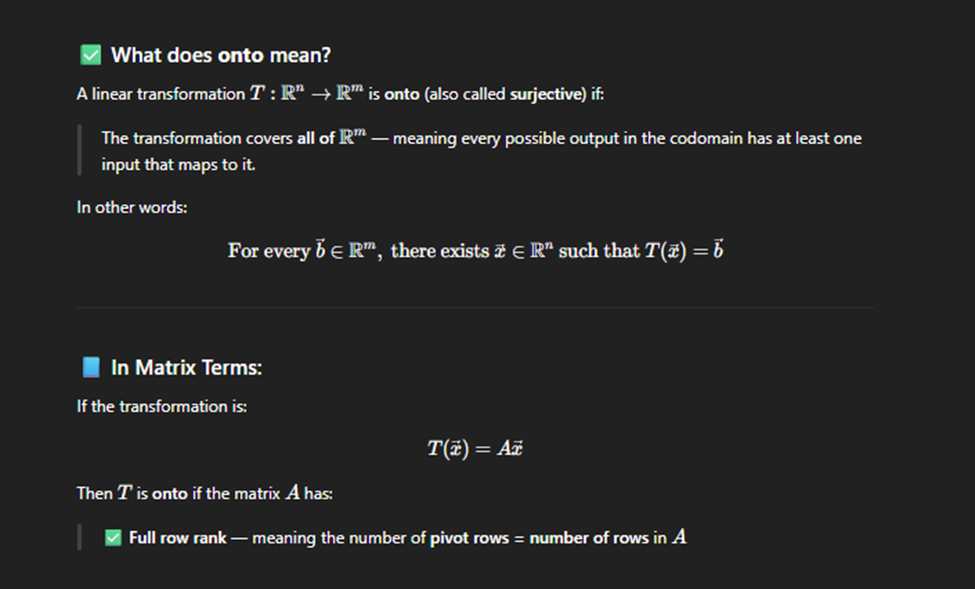
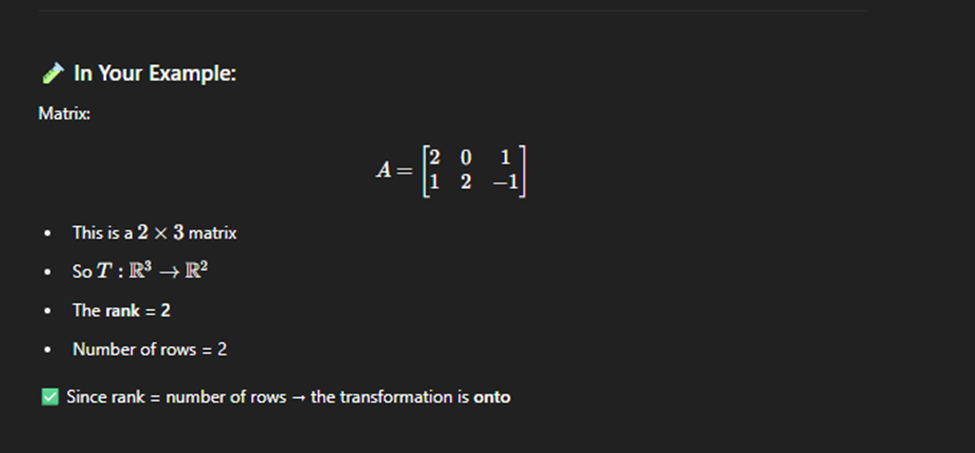
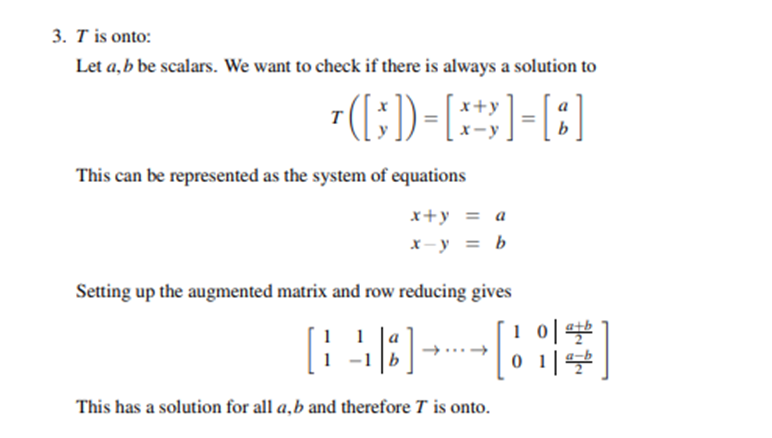
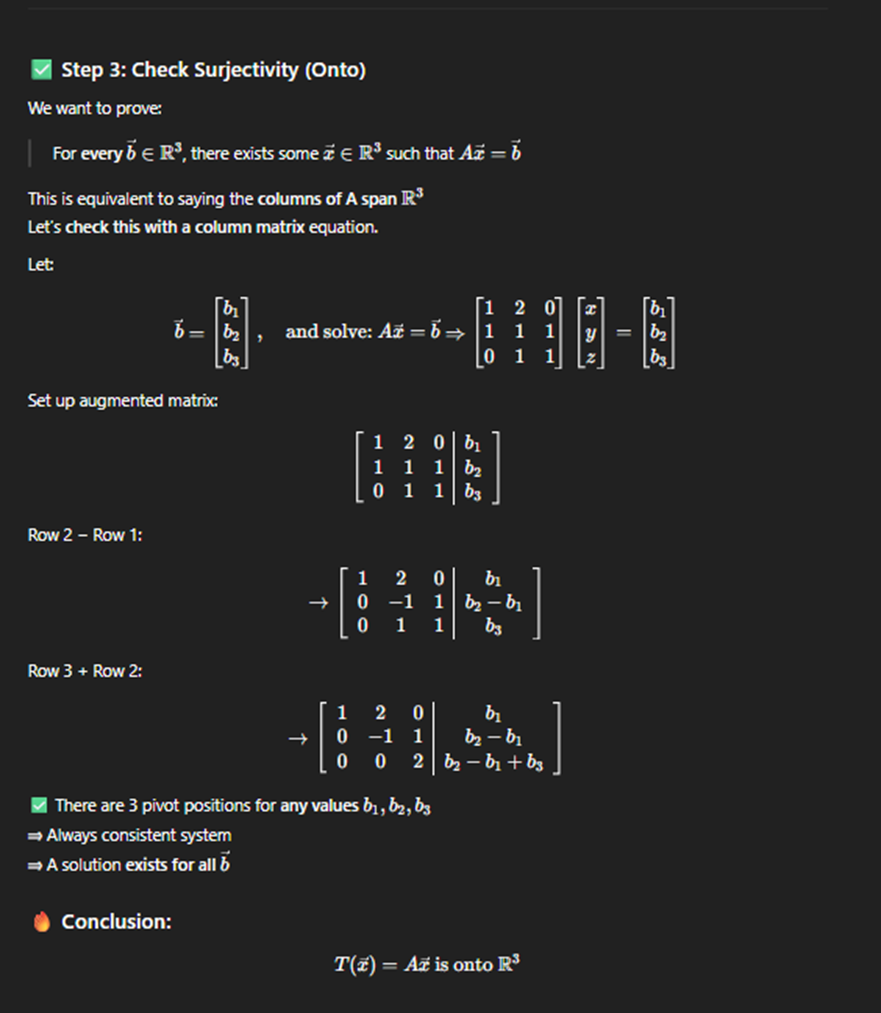
Onto Linear Transform
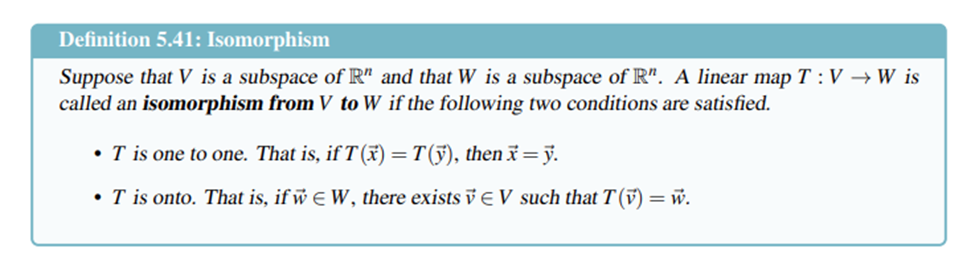
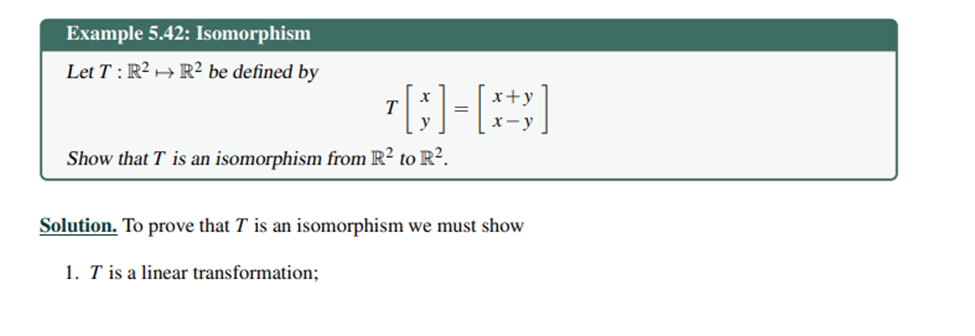
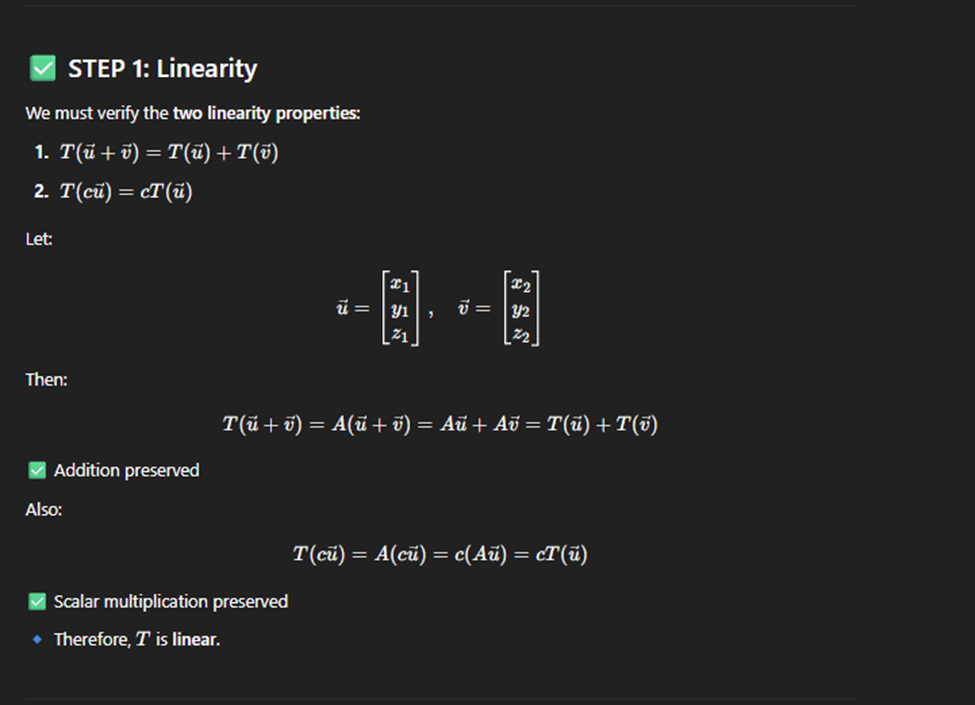
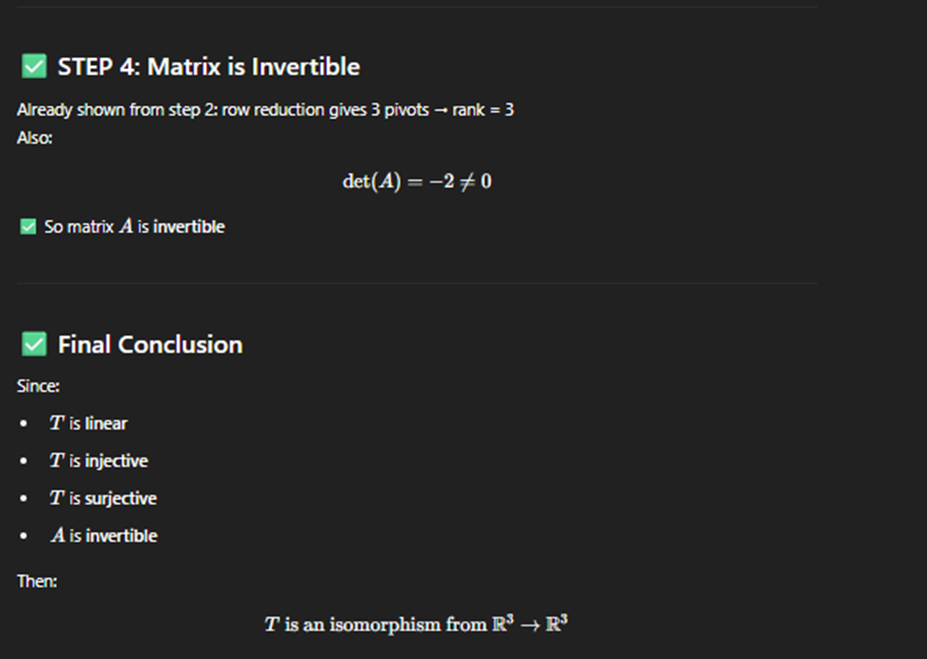
Isophomersim

Properties of isophomerism



if det(A) note equal 0 isopherims (probaby dont use this)
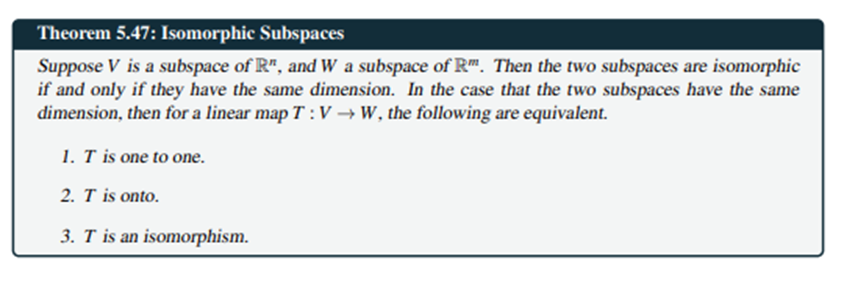
Isopomerism subspace

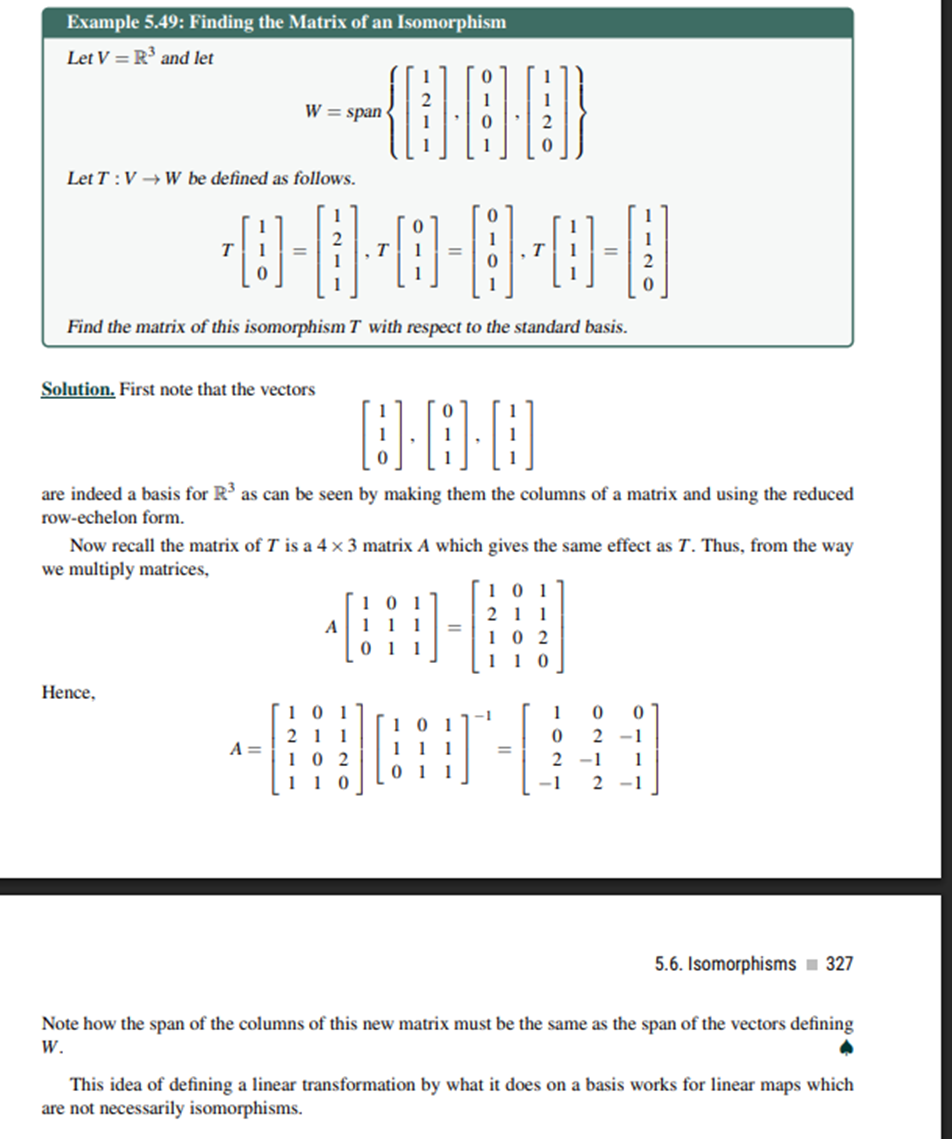
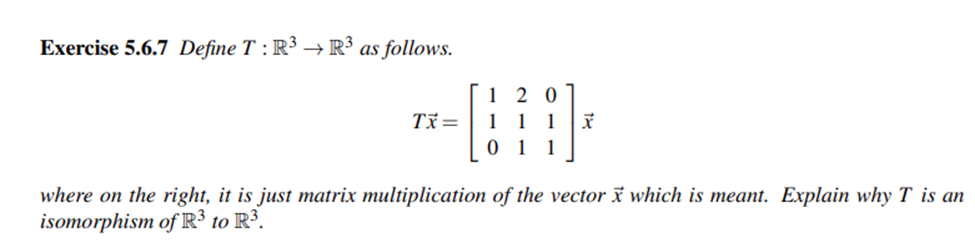
matrix Isophermerism
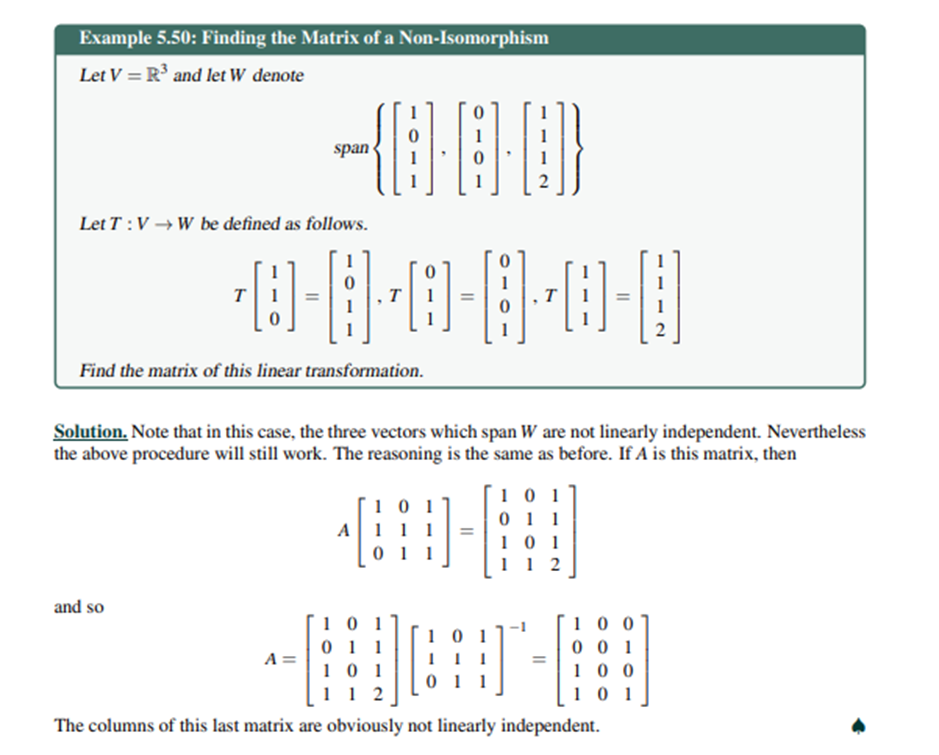
Isophermism more with images
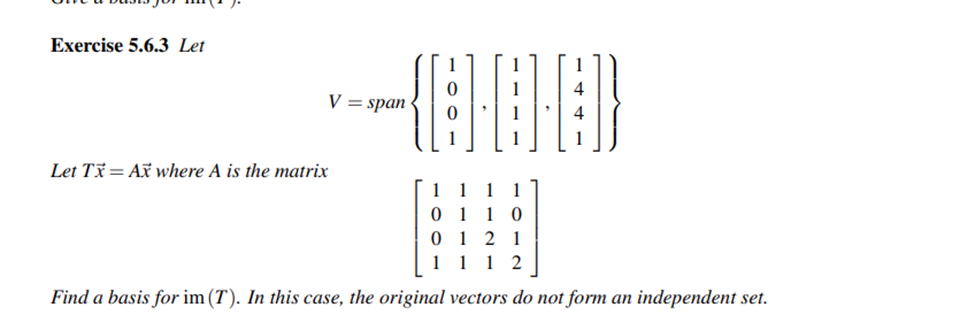
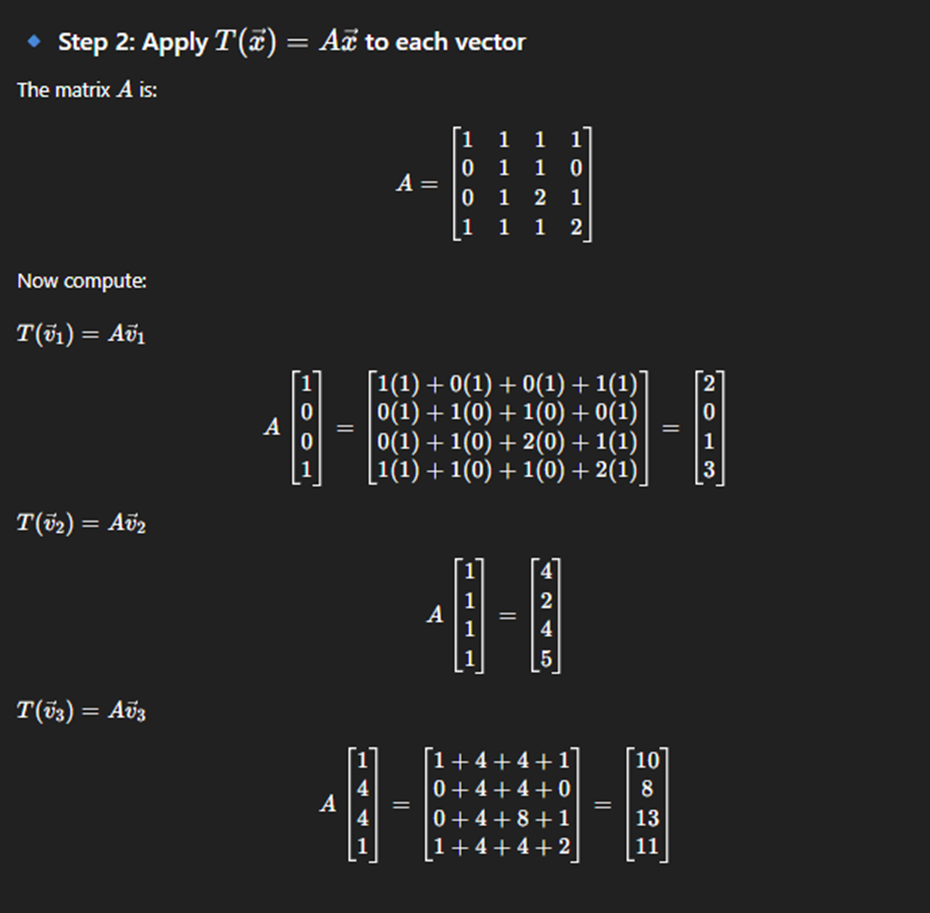

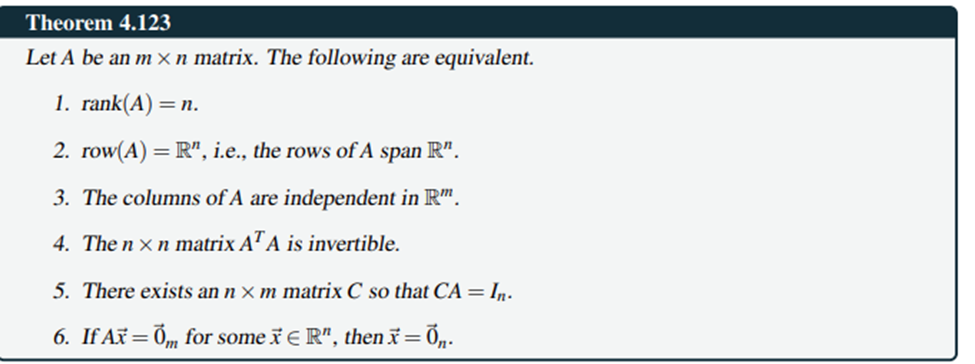
Prove matrix is invetitable
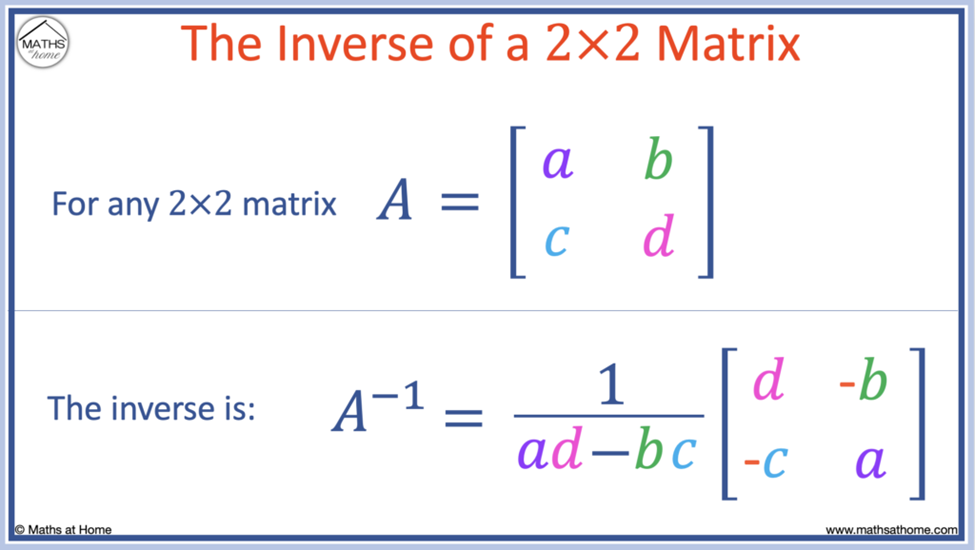
Inverse 2 by 2 matrix
Some more kernal space and others
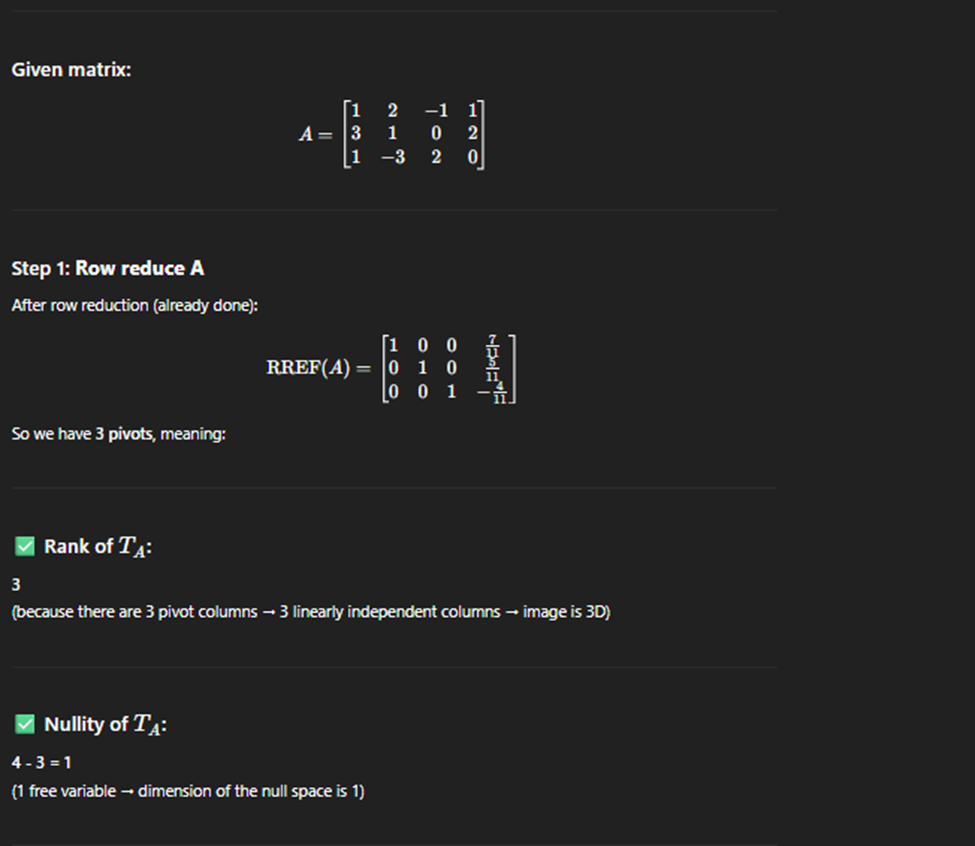
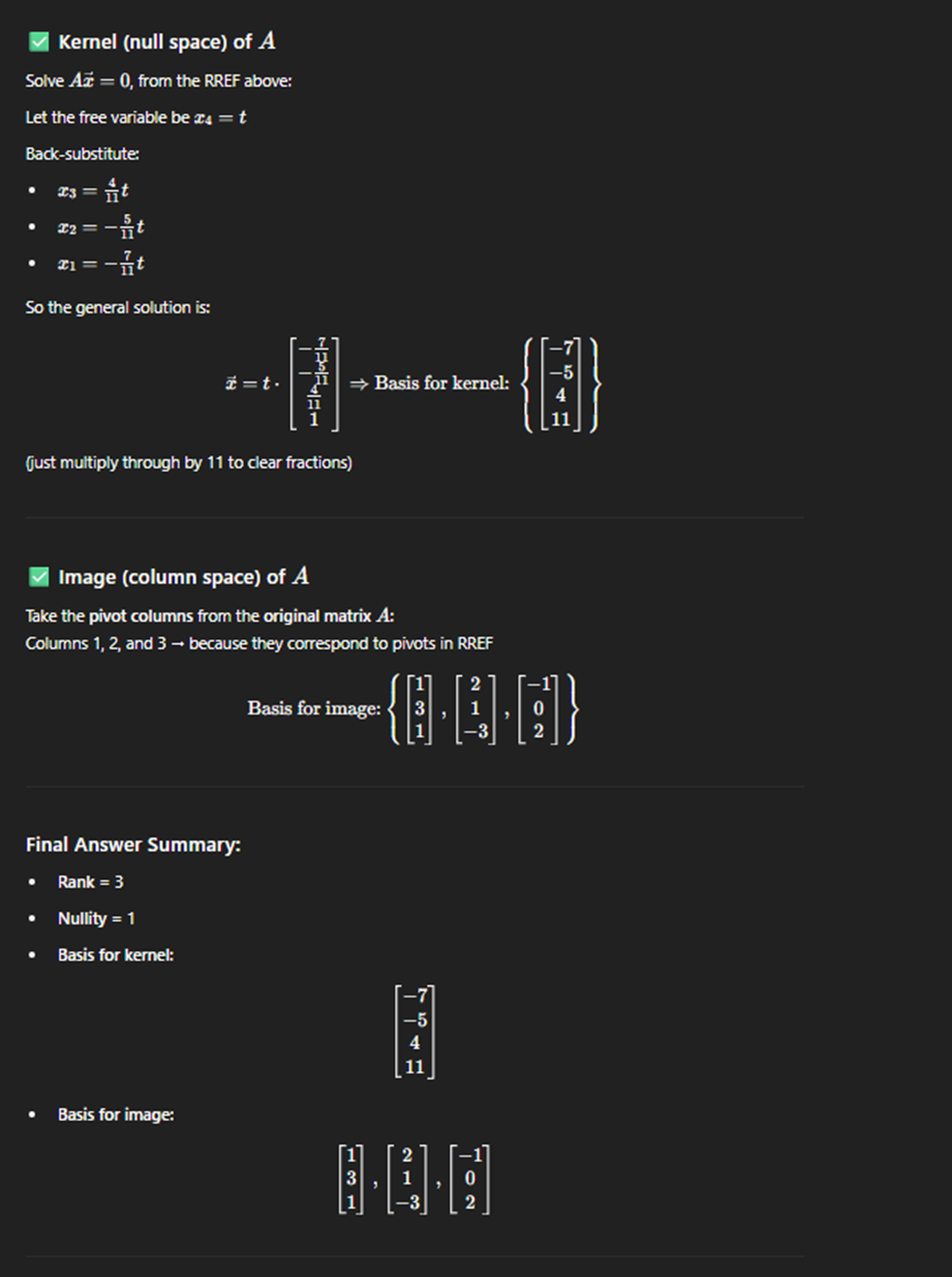
More practice kker basia


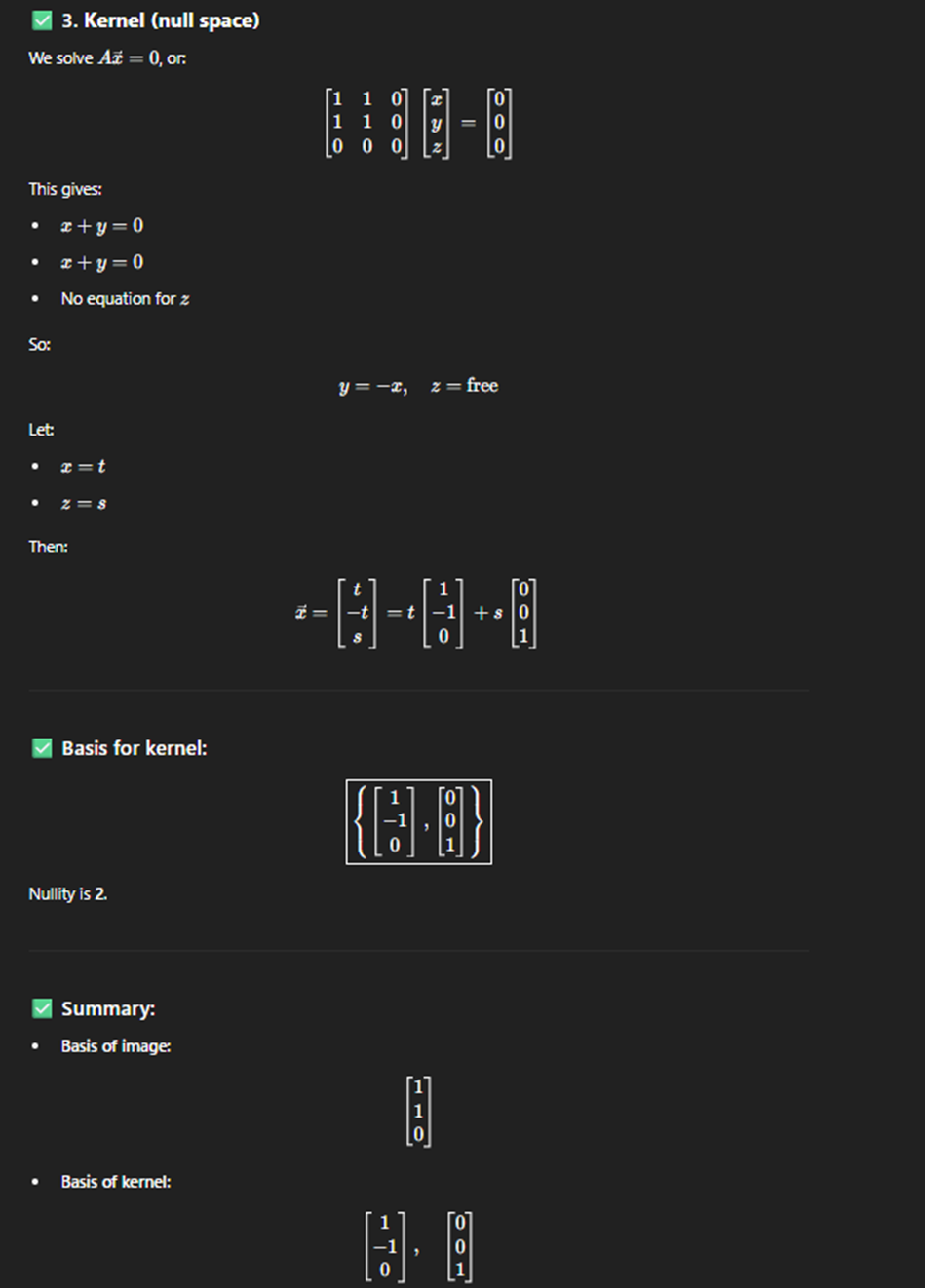
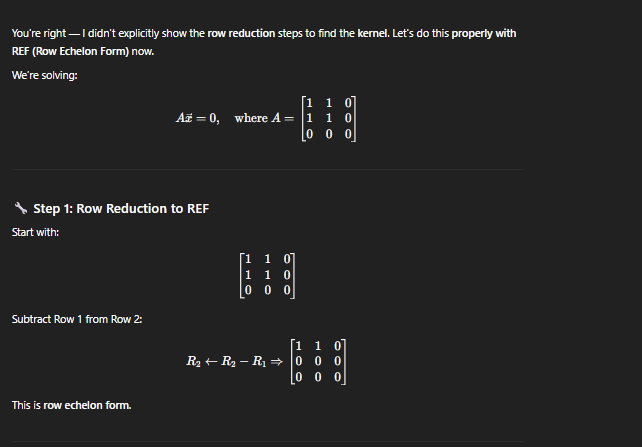
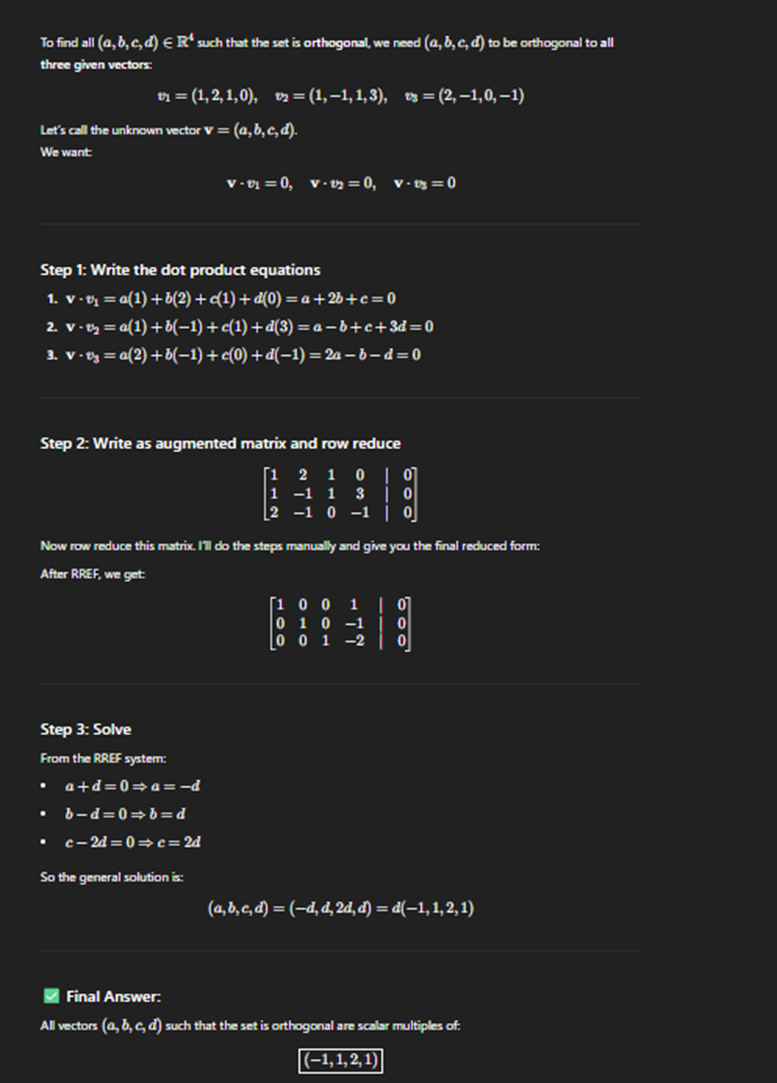
rememeber teh reson its one and all (x+y) is the first rwo and (1 1 0)
all possible to be orthogonal
Orthogonal projection in liek span
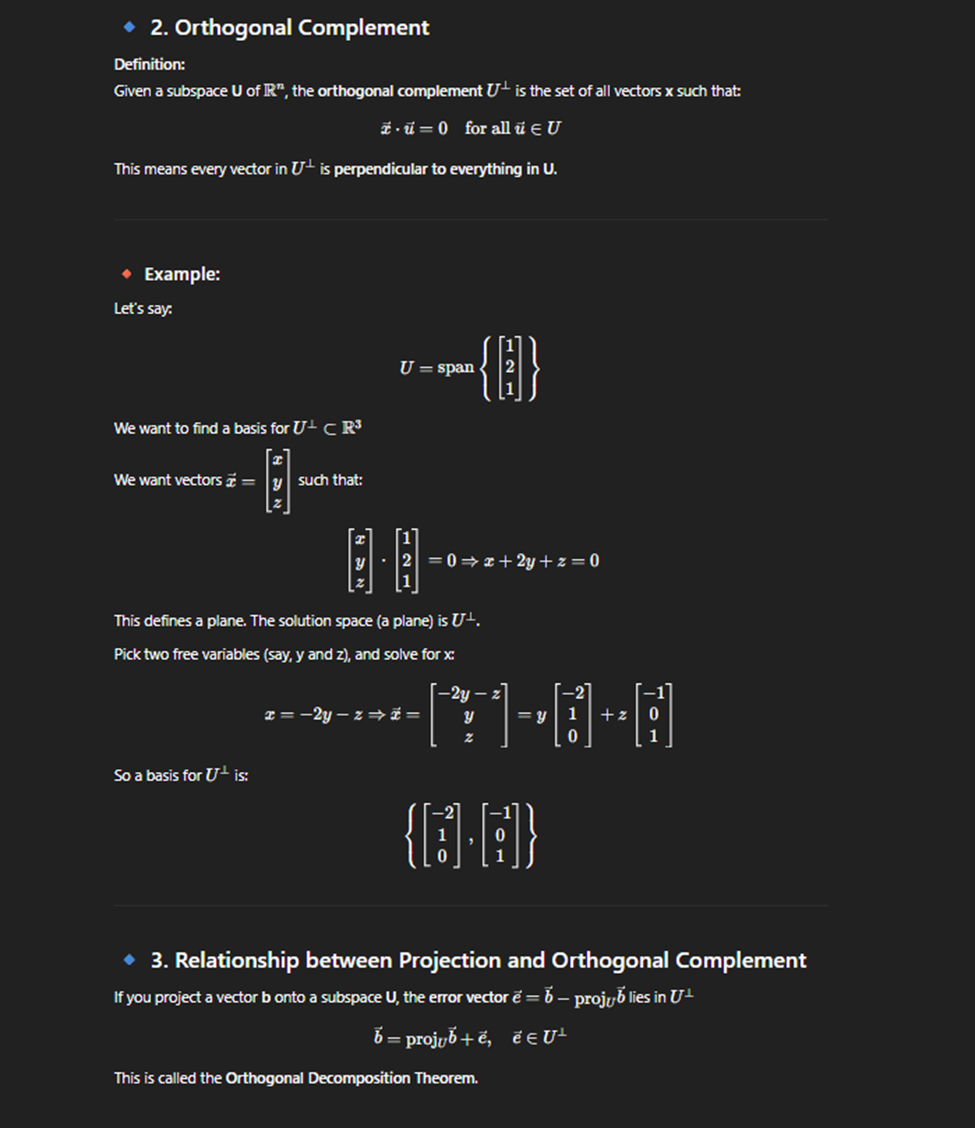
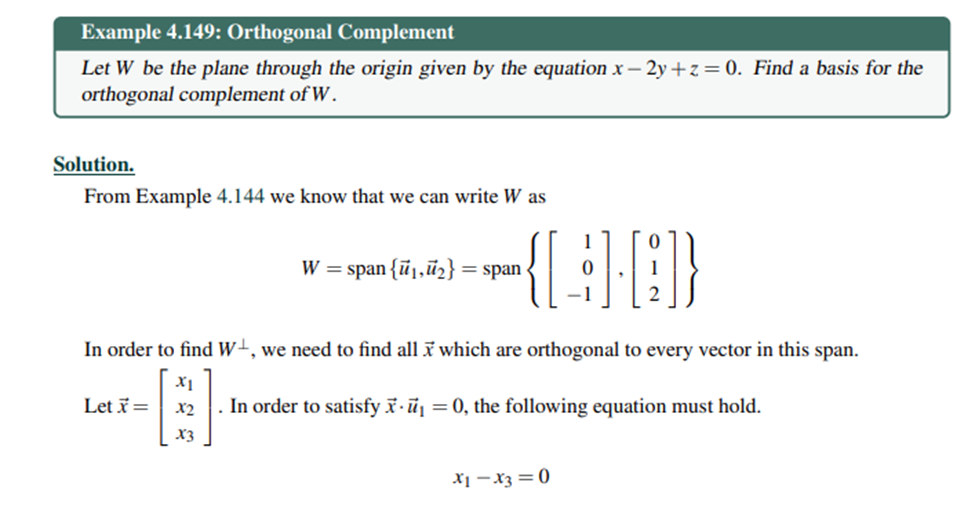
Orthogoanl complement
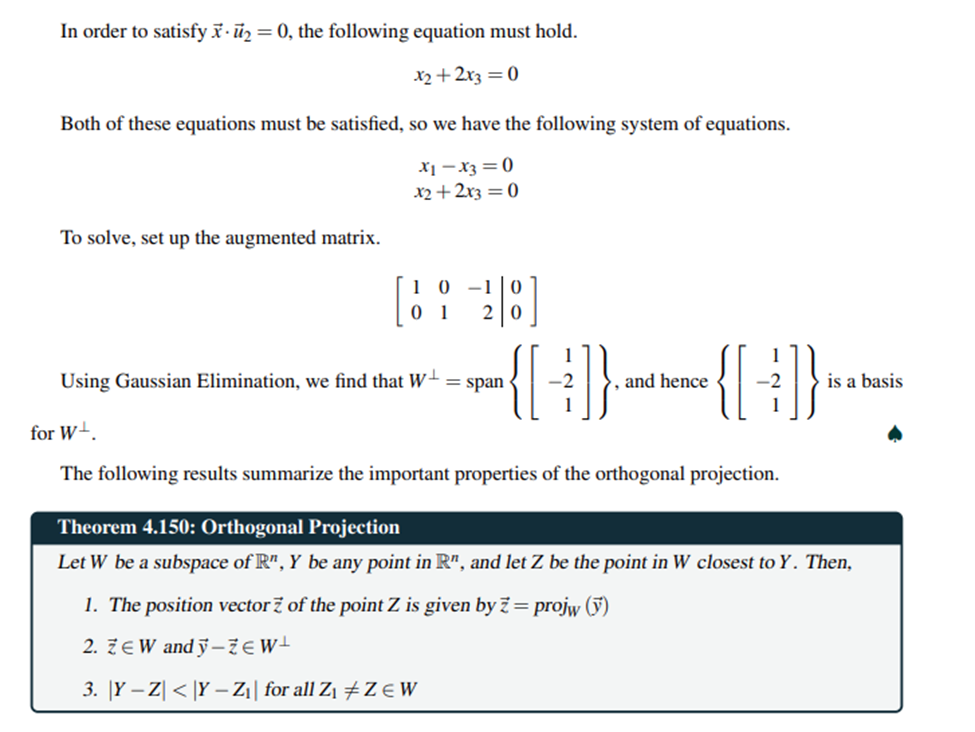
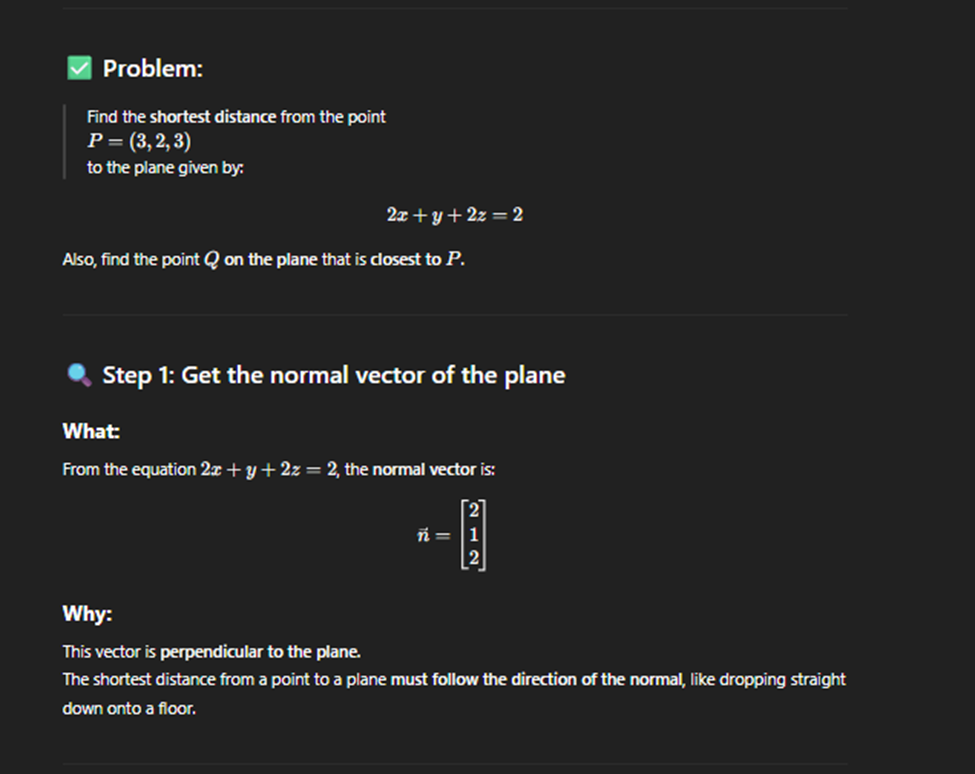
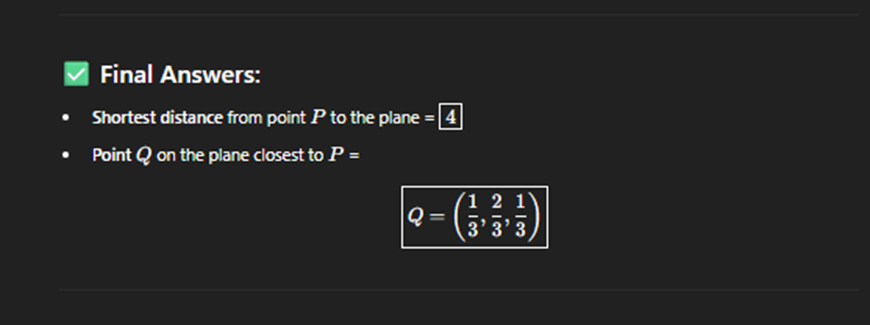
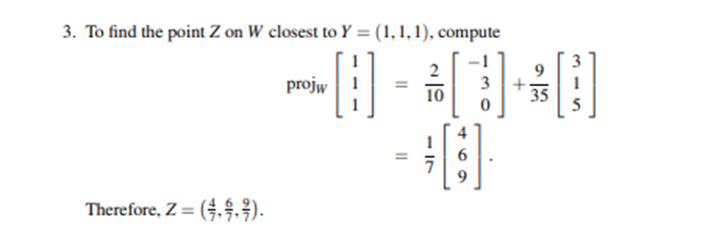
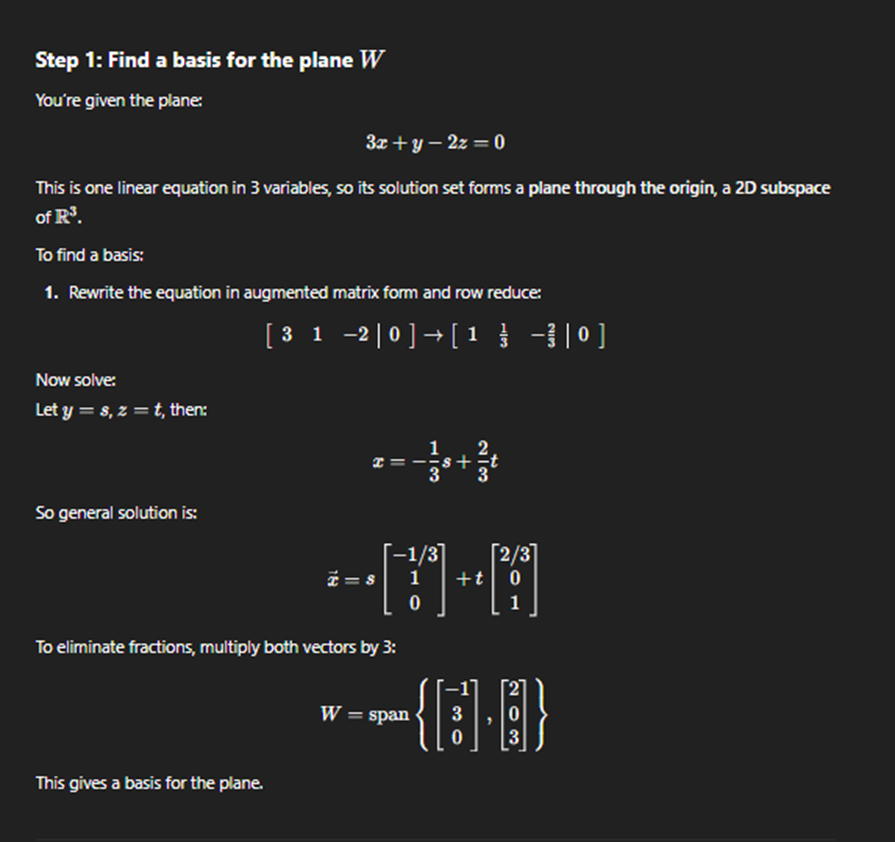
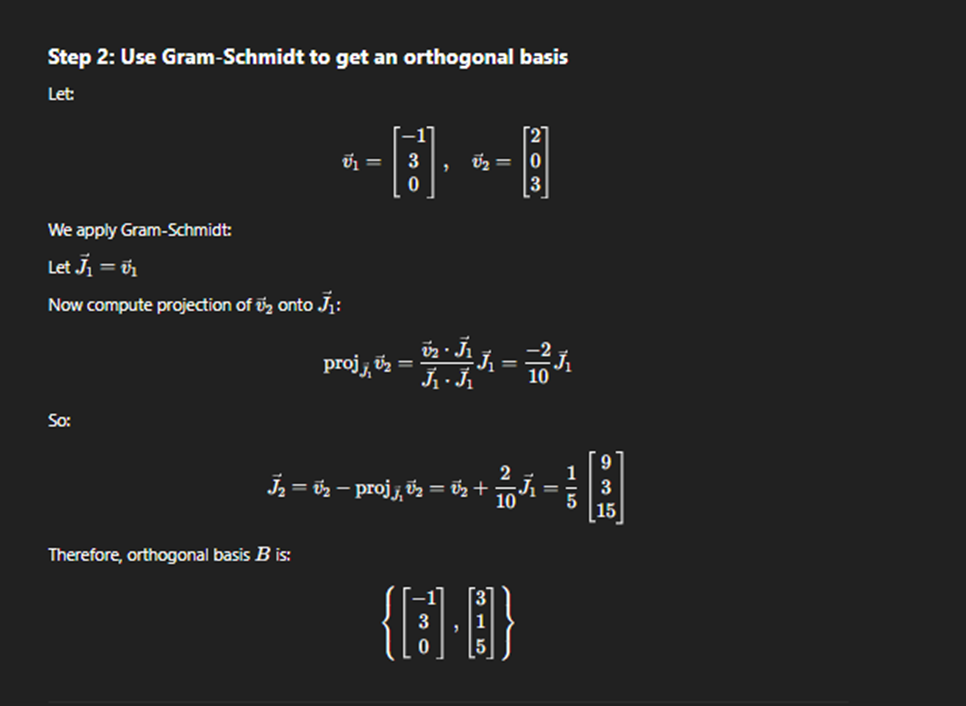
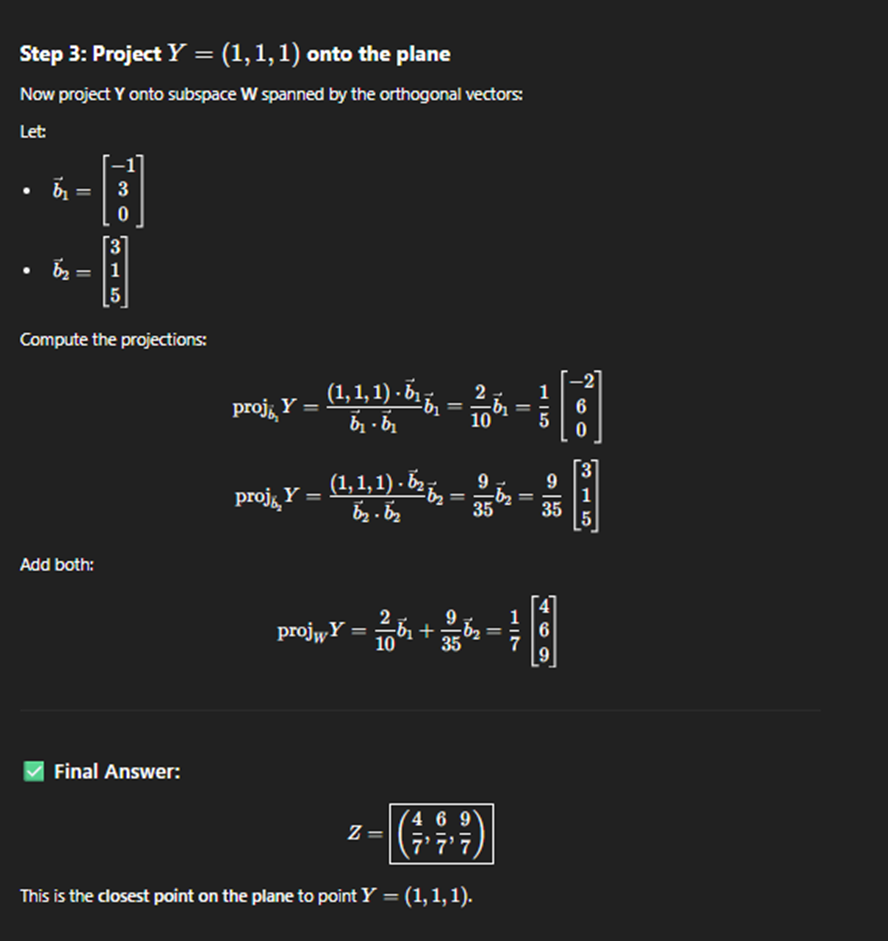
Poitn in a plane closest to a given point

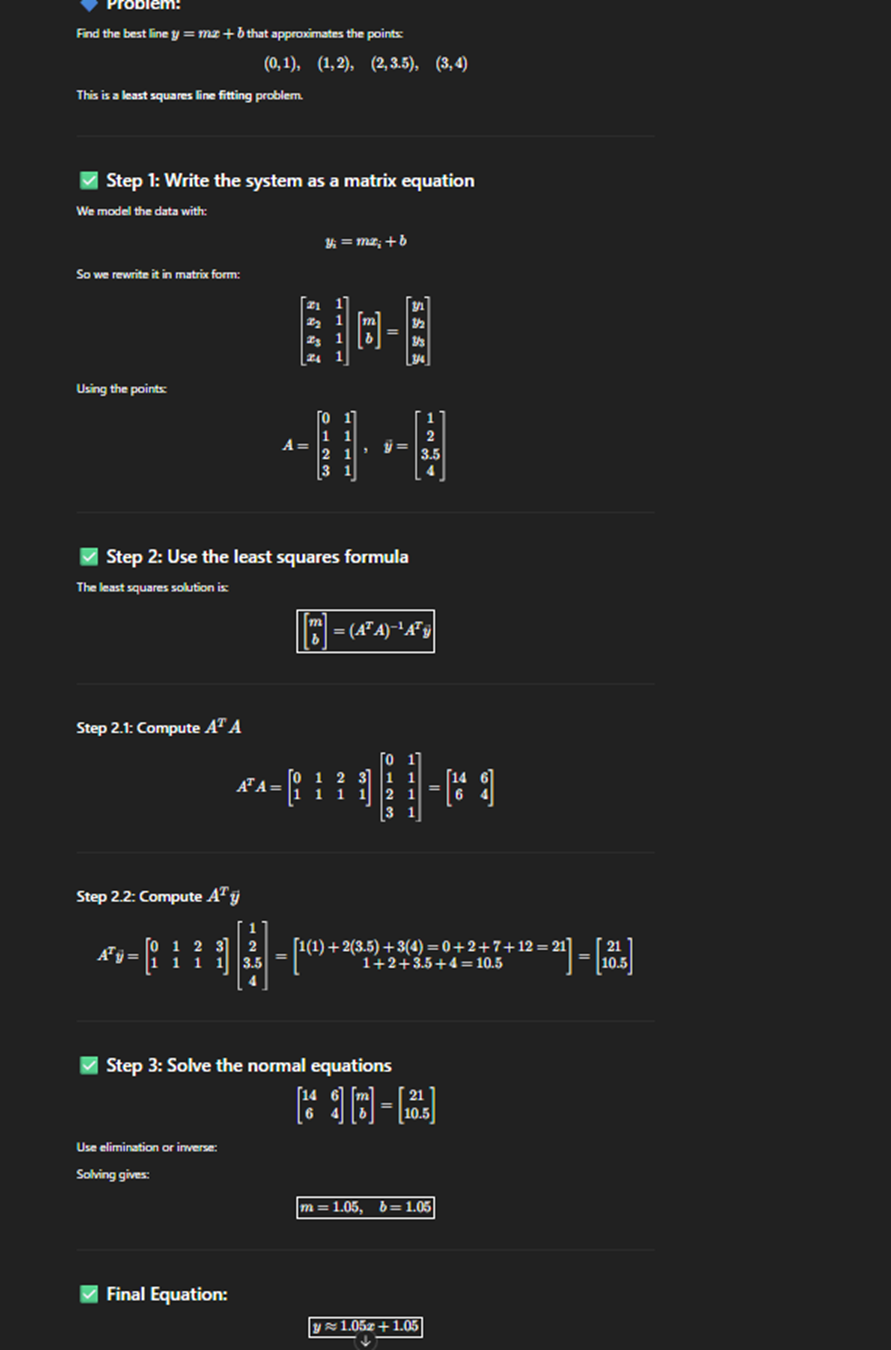
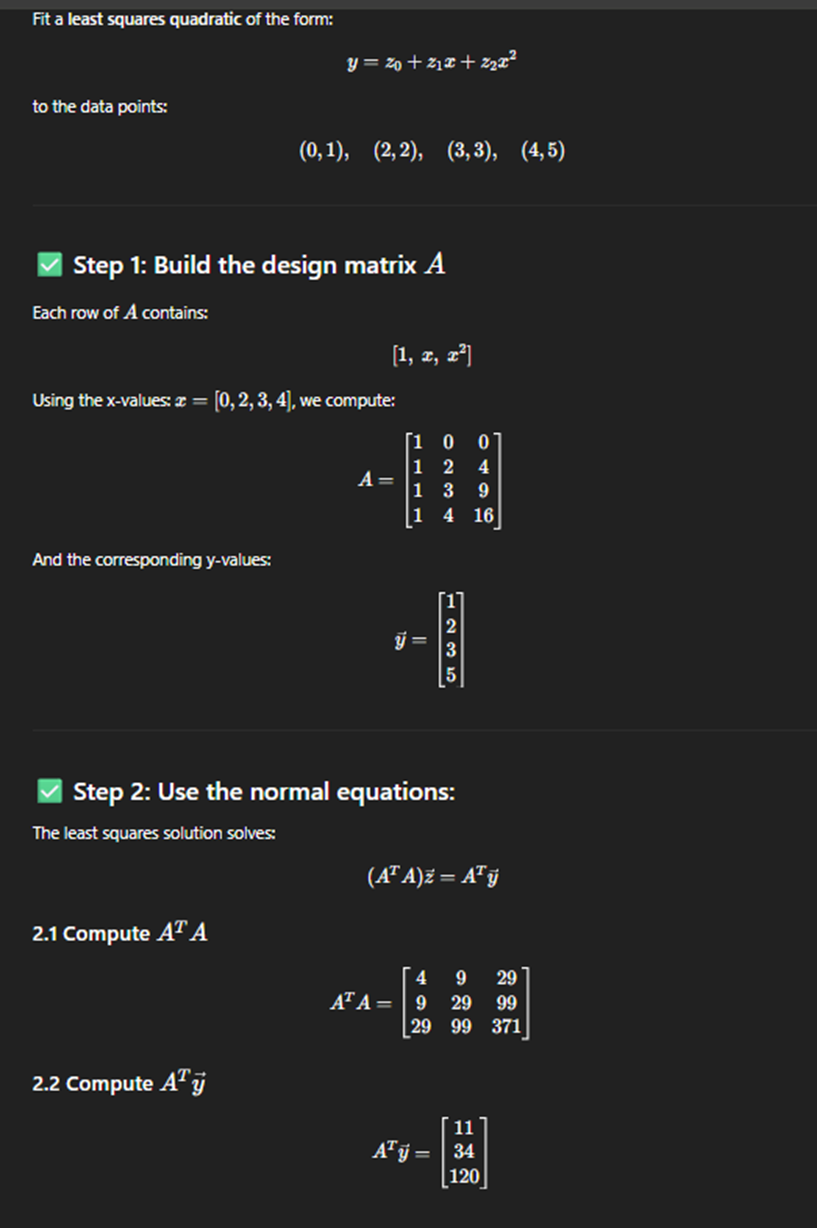
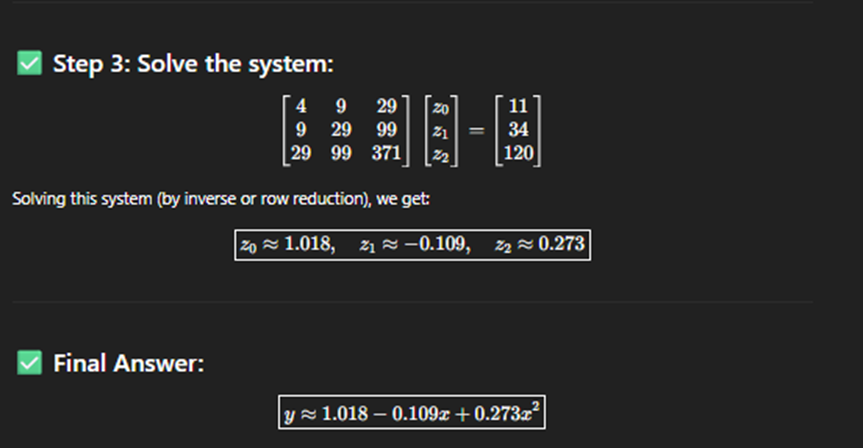
Least square solution
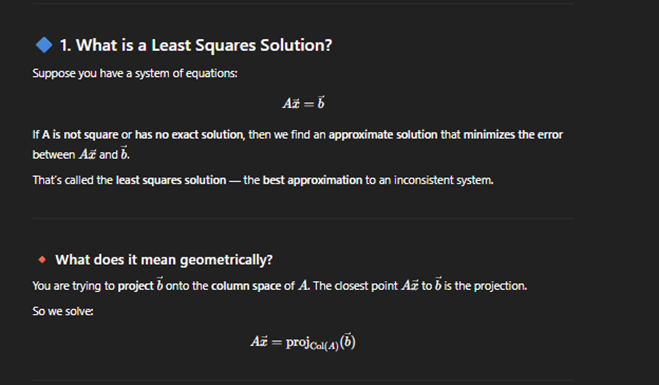
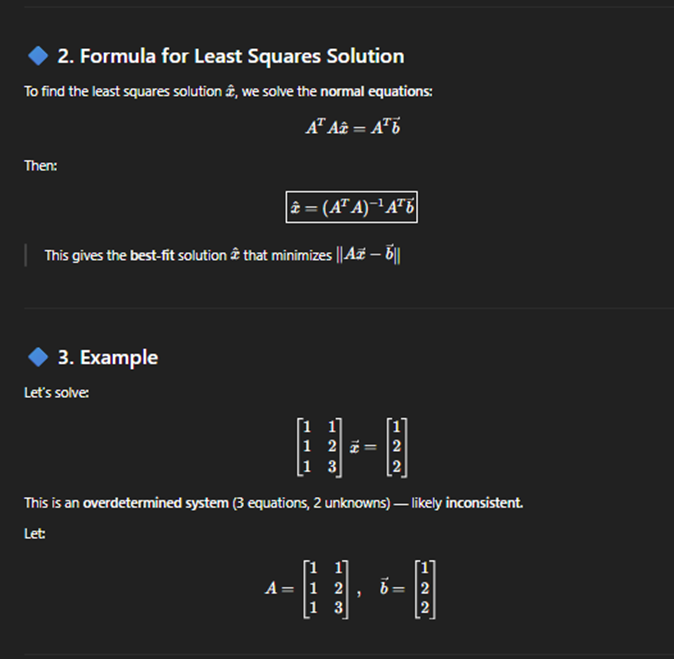
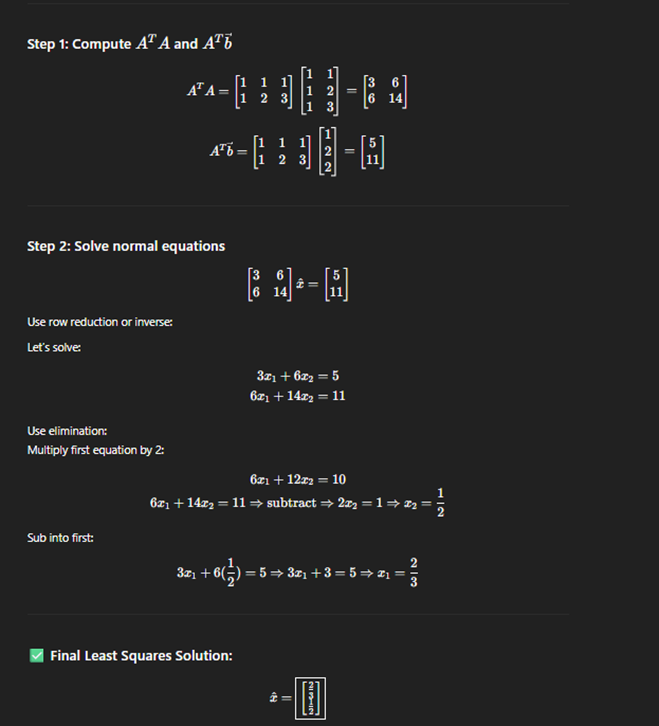
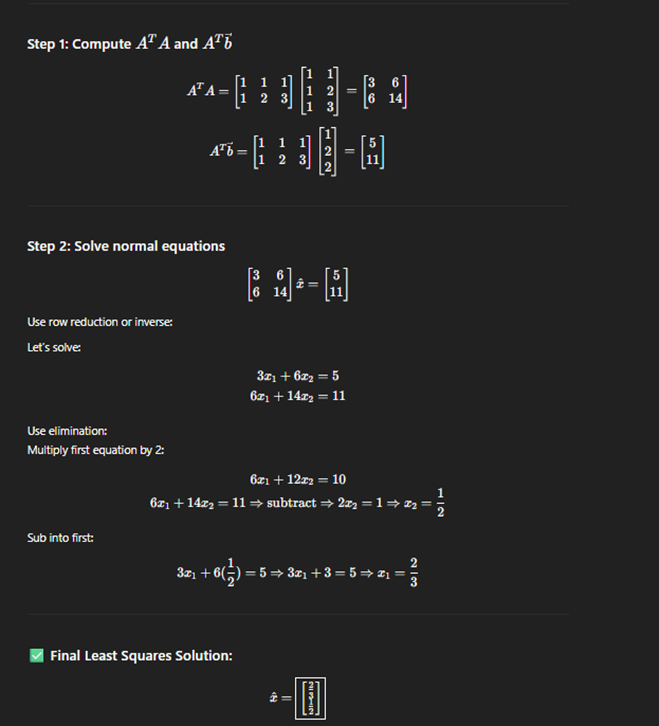
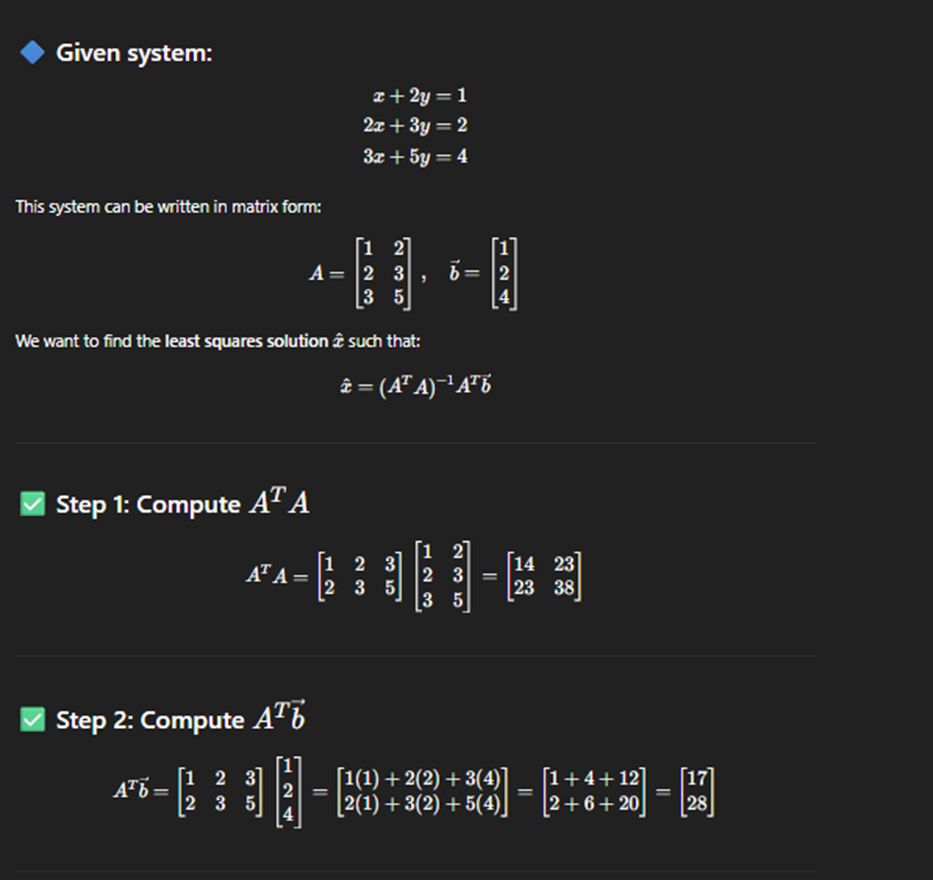
Least square soltuions more
solve some system for fun