4 & 5- Biomechanics
1/136
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
137 Terms
What is biomechanics?
Application of mechanical principles, including the study of forces, that are applied to and within the human body,
as well as how the body reacts to those forces
- Newtons Law of motion
Mechanics
Branch of physics dealing with the study of forces acting on systems
- "Bio"mechanics: Forces acting on and within biological systems
Statics
Study of objects with no acceleration (i.e. at rest or constant velocity of motion)
Dynamics
Study of objects/systems subjected to acceleration
Kinematics
Study of motion without regard to the forces contributing to that motion
Kinetics
Study of the effect of forces on the body and resulting motions they create
Newton's first law: law of inertia
• A body will remain at rest OR at constant velocity until acted upon by an external force
• A force is required to start, stop, or change motion
Inertia
Amount of energy required to alter the velocity of an object/body
- Directly proportional to an object's mass
Newtons 2nd law: law of acceleration
Linear motion/acceleration vs. Angular motion/acceleration
Linear acceleration of a body is: (ex. Car driving)
directly proportional to the force causing it, occurs in the same direction as the force causing it, and is inversely proportional to the mass of the object/body
"Force" linear
Angular acceleration of a body is:
body is directly proportional to the torque causing it, takes place in the same rotary direction as the torque causing it, and is inversely proportional to the mass moment of inertia
"Torque" rotational no.
If acceleration is 0, sum of ______ and sum of ______ = 0.
force, torque
In the body, torque is primarily produced by:
Muscles and tendons
Newtons 3rd law: law of action reaction
• For every action (force/torque) there is an equal and opposite reaction (force/torque)
- Force/torque acts with same momentum and opposite velocity
(Ex. Pulling a Theraband in horizontal ABD, or ground force reaction from heel strike)
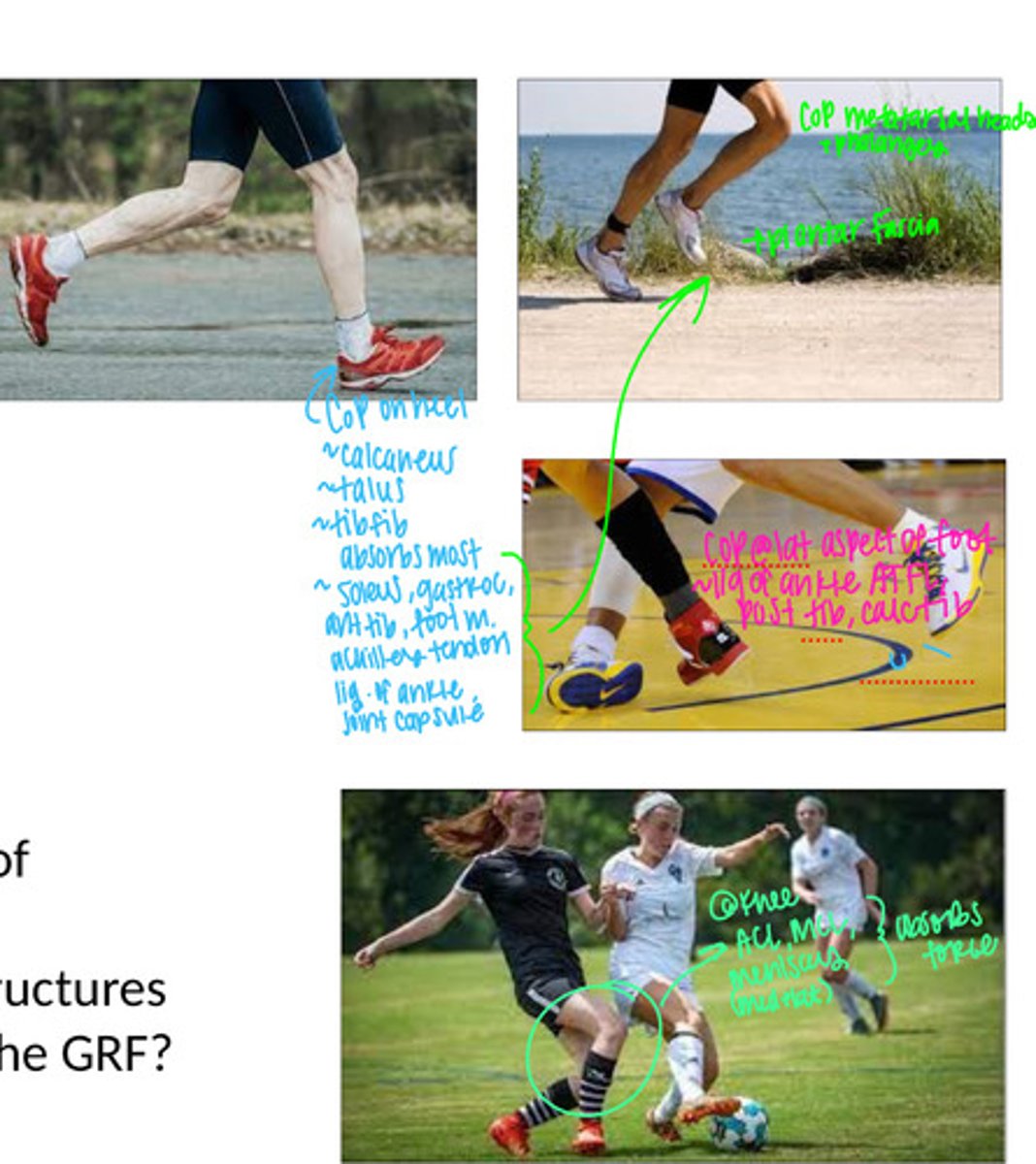
Ground Reaction Force (GRF)
The equal and opposite force that is exerted back onto the body with every step that is taken (heel strike)
- Has X,Y, and Z vectors
• Body segment(s) absorb and adapt to GRF
What anatomical structures absorb and adapt to GRF?
Arches of the foot - ligaments and bones, intrinsic foot muscles, bursa, tendon, skin
Rotational motion =
Torque
Internal forces
Act within the body (Ex. Muscle forces, ligament tension)
External forces
Act on the body or segment (Ex. Gravity, GRF, free weight, contact injury)
Weak tissue by disease, trauma, or prolonged disease may not be able to adequately resist the force/load, compared to healthy tissue. T/F?
True
Normal forces/loads frequently applied to the MS system are:
Unloaded, tension, compression, bending, shear, torsion, combined loading (healthy tissues can withstand all!)
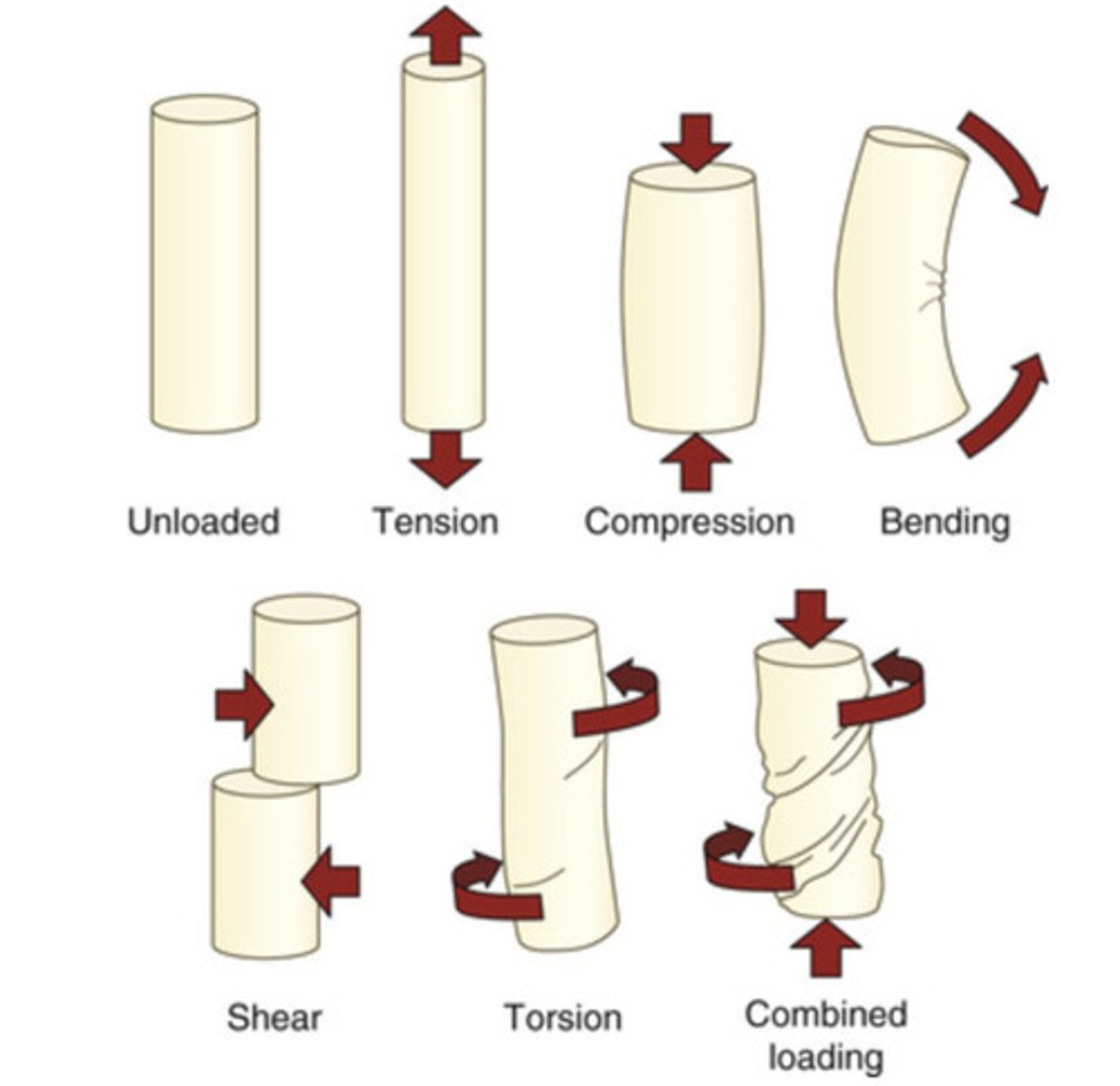
Tension force
Both ends pulled away from the center
Compression force
Both ends push toward (ex. Weight bearing)
Bending force
One has compression, other has tension
Shear force
One force coming one direction, other coming from the other (can be side to side and up-down)
Torsion force
Twist/rotational force
Combined loading
All! Most common to have all with injury
Center of pressure
Point of application of GRF, changes as movement occurs
*see pic
Where is the center of pressure in the picture? Which anatomical structures absorb are going to absorb the GFR?
In addition to mass, CoM depends on the shape and distribution of mass and density. Additionally, CoM depends on density, uneven and evenT/F?
True
CoM of whole body is just ____ when in anatomical position
Anterior to S2
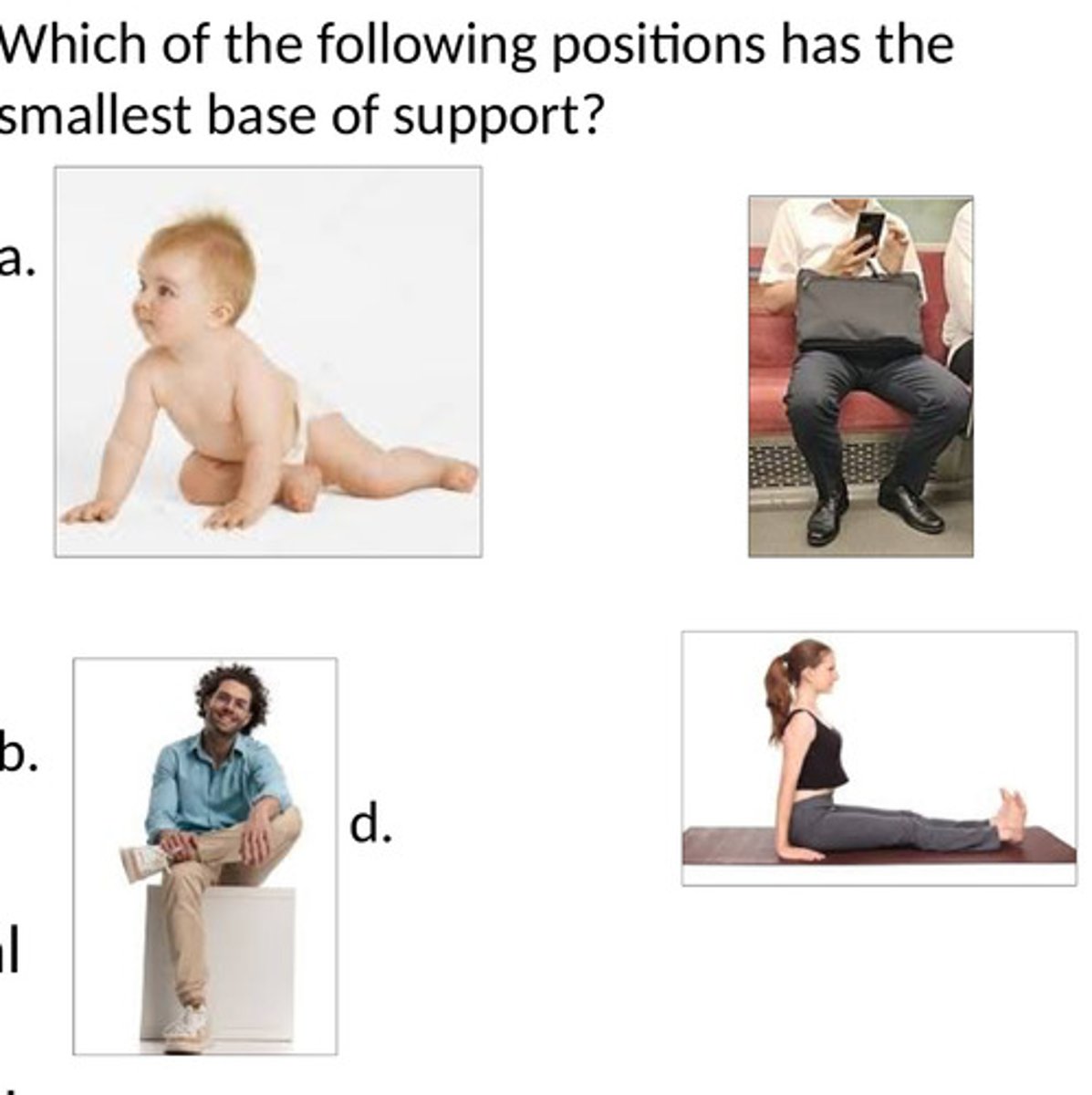
Base of support (BoS)
•Area enclosed by all points at which the body contacts a supporting surface
•A person can move the center of pressure to any point within the base of support, but cannot move it outside the base of support
(Canes = wider BoS)
Static balance
•For equilibrium, the center of pressure must be directly below the body's CoM
•Thus, to be in equilibrium, the body's CoM must be within the boundaries of the BoS
***(CoM must be over CoP!)
A large/wider BoS allows for a greater excursion of the line of gravity without the line of gravity falling outside the BoS. T/F?
True
What are the potential ramifications of positioning oneself with a small base of support?
Less area for you to manipulate your CoM, increases the chance of falls and injury
B (BoS is point of contact)
Which of the following positions has the smallest base of support?
Center of mass (CoM)
Point at which an object/body's mass is equally distributed
- CoM changes and may be inside or outside of the object/body (ex. CM of knee flex in 90 is below the leg just under the knee)
Internal forces
• Any forces or the combination of forces acting at a joint
• Can include forces from: Net muscle force (ΣFm), Bony contact (Fc), Ligaments, joint capsule, Skin, nerves, blood vessels etc
What creates Resultant Joint Force/Joint Reaction Force?
Muscle and bone contract
Torque (moment) equation
Torque = Force x Moment Arm
Moment arm
The distance between axis of rotation of a joint and application of force (hold weight while ABD shoulders, moment arm = distance between shoulder and weight)
Internal moment arm
Distance between joint axis and application of the torque (during ABD, its the distance between medial deltoid (primary Abductor) and the shoulder joint
Internal Moment Arm (IMA) & External Moment Arm
(EMA)
Internal forces = Internal Moment Arm
External forces = External Moment Arm
External moment arm is
Distance from external force to the joint's axis of rotation
(What gravity is doing Ex. Dumbbell)
*If the force is applied close to the joint axis (i.e. short moment arm), ____ torque is created
Less
*If the force is applied farther away from the joint axis (i.e. longer moment arm), _______torque is created
More
Distal bicep attachment on radius and aponeurosis are
close to the axis of rotation of the elbow, therefore, a _______moment arm?
Smaller moment arm = less torque
Distal hamstring attachment on tibia/fibula is a longer distance from the hip axis of rotation, therefore a ______ moment arm?
Longer moment arm = more torque
Holding a dumbbell in your hand while performing shoulder flexion vs. performing the same exercise with a cuff weight around your distal arm.
Which will create more torque on the shoulder?
****
Patella ________ the moment arm of the quads
increases
Name 3 muscles whose distal attachment is close to the joint axis of rotation
Supraspinatus, rotators of the spine, flex carpi ulnar is, anconeus, pronation teres, poplitieus (shorter internal moment arm = less internal torque)
Name 3 muscles whose distal attachment is farther from the joint axis of rotation
Adductor magnus, sartorius at the hip, rectus femoris hip, brachoradialis for elbow flexion (longer internal moments = more internal torque)
Net moment or torque
Net effect of ≥ 2 moments/torques about a joint
Net moment or torque equation
Net torque = moment armFsineangle
Any force directly on axis of rotation produces ___ torque bc moment arm = 0
0
*What is the significance of net torque equation?
Angle of force applied matter! Needs to be perpendicular during MMT to create the most torque that matters!
Translation
linear motion in which all parts of a rigid body move
parallel to and in the same direction as every other part of the body
Rotation
rigid body moves in a circular path around a pivot point,
causing all points in the body to simultaneously rotation in the same angular direction (i.e. clockwise, counterclockwise)
(Ex. skiing down a mountain vs. tumbling down)
Normal forces
acts perpendicular to object (segment)
- Portion of the force that creates a moment/torque
Tangential force
acts along the axis of the segment, either compressing or
distracting the segment
- Compression forces are stabilizing
- Distraction forces pull bones away from each other (traction)
• Force components change throughout range of motion
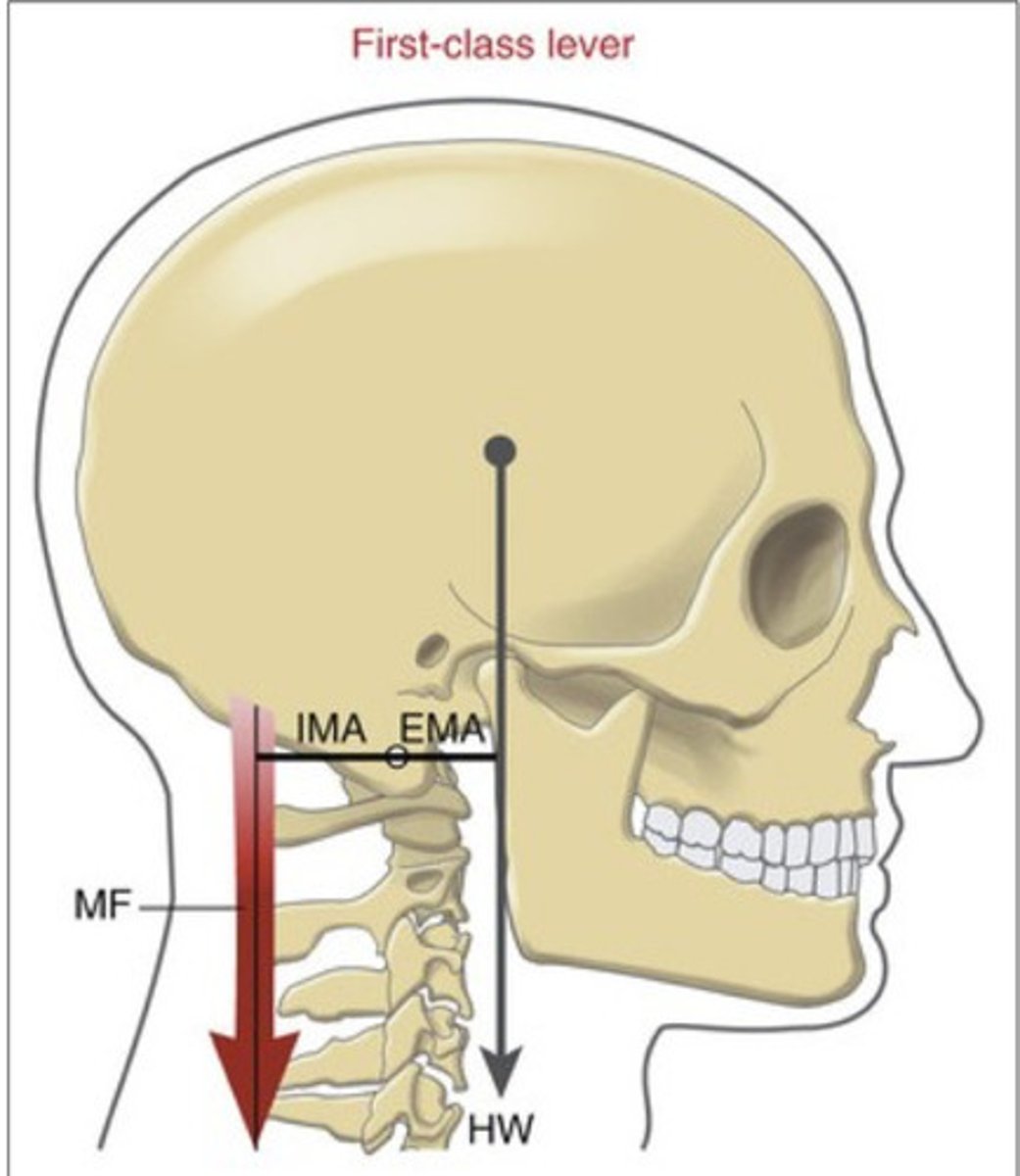
musculoskeletal levers convert linear forces into rotary torques. There are 3 classes. T/F?
True
1st class lever
Axis of rotation positioned in the middle of opposing forces
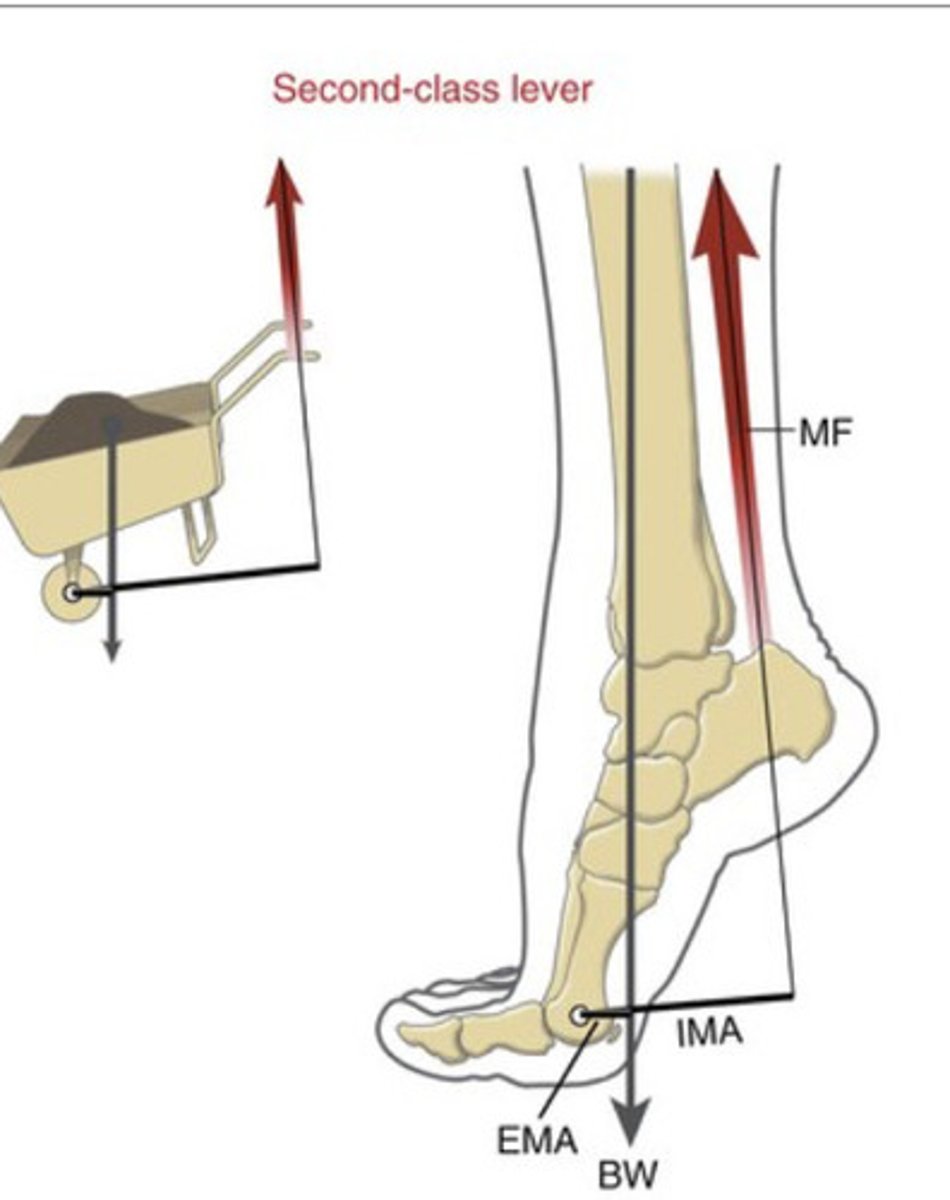
2nd class lever
Axis of rotation is located at one end of a bone and the muscle (internal force) possesses greater leverage than the
external force
- Rare in the musculoskeletal system
(GASTROC - internal moment arm is longer than the external moment arm)
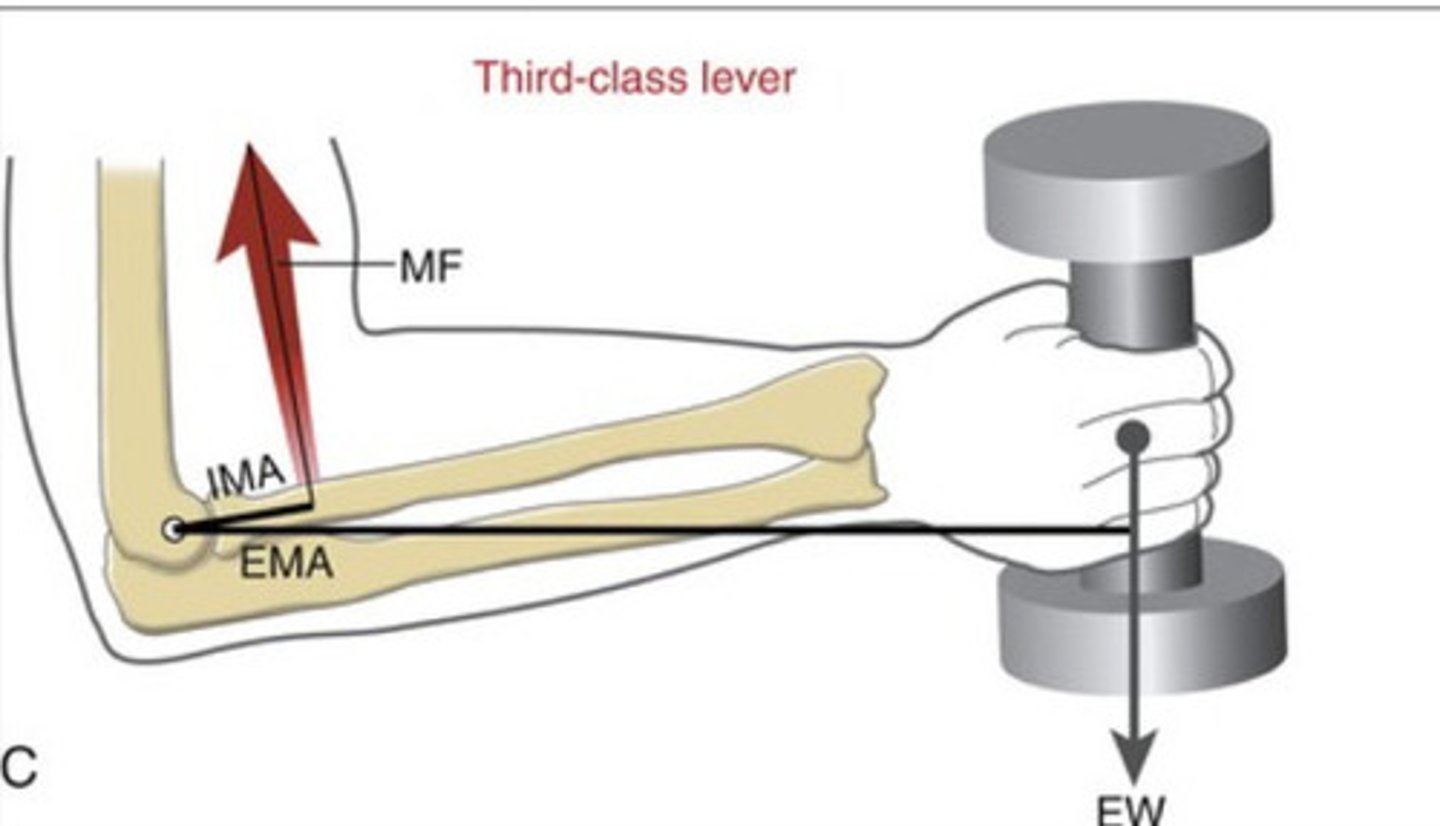
3rd class lever (most common)
Axis of rotation located at one end of a bone and the external force always has greater leverage than the muscle (internal force)
- Most common lever in the musculoskeletal system bc most muscles attach close to the joint
(Flexing the elbow - internal moment arm attaching to bicep is short, has to overcome weight of arm and dumbbell)
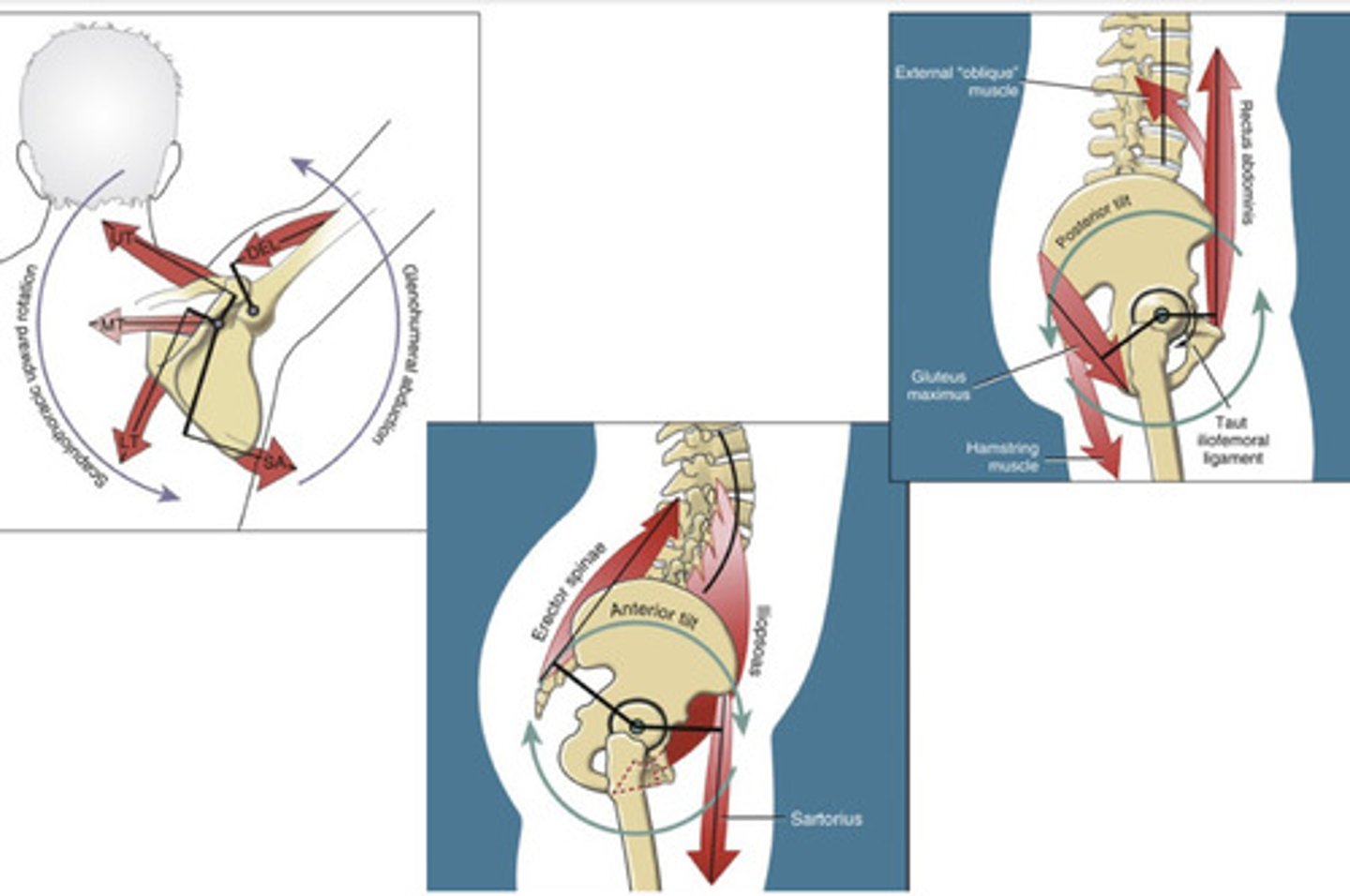
Muscular force couple is formed when
2 or more muscles simultaneously produce forces in different directions that are equal in magnitude (ex. Car steering wheel or twisting open a jar - magnitude is the same but the direction is opposite)
(Ex. PPT, or APT)
Center of gravity (CoG)
Point at which an object/body's weight is evenly distributed
- All external torques due to gravity = 0
- The body is perfectly balanced in relation to gravity
Free body diagram
• "Snapshot" or simplified sketch that represents the interaction of an object and the environment
• Used for biomechanical analysis
• Object can be a single segment (i.e. ankle) or several segments that are considered a system (i.e. head, arms, & trunk)
• Includes both internal & external forces acting on the system
Every joint has tri-planar (x, y, z axis) motion. T/F?
True
Steps for constructing a free body diagram
1.Identify and isolate the segment or system of interest draw the diagram
2. Define a coordinate reference frame including +/- directions
3. Draw the external forces/moments acting on the segment/system
- Make sure to indicate direction of each force
4. Draw the internal forces/moments acting on the segment/system
- RJT and JRF OR ΣFm and Fc
5. Write the equations of motion
- Net forces/moments = 0 if performing status equilibrium analyses
Joint reaction force =
Sum of muscle force and boney contact
Right hand rule
• Describes a 3-D coordinate system
• Index= x axis + direction
• Middle=y axis + direction
• Thumb=z axis + direction
Osteokinematics
Describes the motion that occurs at a joint between the bones that comprise that joint
open kinetic chain
Distal segment of kinematic chain is not fixed to an immovable surface (i.e.
ground, table
Distal = moving
Knee extension, elbow flexion, hip ABd
(Ex. Lat pull down machine)
Closed kinetic chain
Distal is fixed to immovable surface, proximal is moving (ex. Push-up: hand is fixed, other is moving)
Local Frame of Reference for Movement
• Relates the moving body segment to a small region
• Related to proximal or non-moving segment
Degrees of freedom
The number of independent directions of movements allowed at a joint
- Up to 3 degrees of angular freedom, related to the 3 cardinal planes
- Shoulder and hip have 3 degrees of freedom
- Wrist has 2 degrees of freedom
Arthrokinematics (accessory motions) describe
The motion that occur between the articular surfaces of joints (3)
What are the 3 fundamental movements between joint surfaces?
Roll, spin, glide/slide (doesn't matter that shape it is!)
***Occur whether convex surface is moving on concave or concave surface is moving on convex
(Convex: femoral head, numeral head; concave: tibial plateau)
Roll
Points of contact on each joint surface are constantly changing so that a new point on one surface meets a new point on the opposite surface (e.g. tires on a car rolling as the car moves forward)
Spin
Rotation of one surface on an opposing surface around a vertical axis (e.g. pirouette)
Gilde/slide
Translation of the two surfaces such that one point of contact on the moving surface contacts new points on the
opposite surface (e.g. tires on a car as the car skids)
Concave convex rule
• Articular surfaces are either convex or concave
• Can have either:
- Convex surface moving on concave
- Concave surface moving on convex
• Roll always occurs in the same direction as the
osteokinematic motion
• Different roll-and glide pattern depending on the moving surface:
- Convex-on-concave surface movement: the convex component rolls and glides in opposite directions
- Concave-on-convex surface movement: the concave component rolls and glides in same direction
Convex-on-concave surface movement
the convex component rolls and glides in opposite directions
Concave-on-convex surface movement
the concave component rolls and glides in same direction
Glide depends on
The shape!
Closed chain knee
Convex femur moving on concave tibia
*Roll always occurs in the same direction as the osteokinematic motion. T/F and expline motion
True. Siting at open chain knee extension, tibia is moving bone, moving anteriorly, therefore the roll is anterior.
Example the concave and convex rule
Concave bone moving on convex bone (open chain knee extension, roll and glide occur in the same direction. If a convex bone is moving on a concave bone, roll and glide move in the opposite direction
(Ex. Tibia is moving anteriorly, so the roll is anterior. Concave tibia is moving on a convex femur. Roll and glide occur is same direction. Tibia = anterior roll and anterior glide!)
What are the 3 types of muscle contractions?
Isometric, connectric, eccentric
isometric contraction
• Muscle produces force while maintaining a constant length
• Internal torque = External torque (SAME)
• No rotation at the joint (0 movement)
Concentric contraction
• Muscle shortens as it produces a pulling force (activates)
• Internal torque exceeds opposing external torque (ex. S/L ER muscles generate more force against gravity/bodyweight/etc.)
• Creates rotation of the joint in the direction of the pull of the activated muscle
Eccentric contraction
• Muscle produces a pulling force (activates) and is elongated by another more dominant force
• External torque exceeds internal torque (the gravity is greater than- slow control the motion down)
• Joint rotates in the direction dictated by the larger external force (usually relaxing phase of movement, and used to control muscle to stop from plopping down)
What is the relationship between external and internal torque and resulting movement during an isometric contraction?
External Torque = Internal Torque
Segment not moving
What is the relationship between external and internal torque and resulting movement during an concentric contraction?
External Torque < Internal Torque
Segment moving in same direction as RJT (resultant joint torque)
What is the relationship between external and internal torque and resulting movement during an eccentric contraction?
External Torque > Internal Torque
Segment moving in opposite direction of RJT
Prime mover
The muscle that produces the Resultant Joint Torque (RJT)
If the joint is moving in the same direction as it is accelerating, then the action is
Propulsive = concentric
If the joint is moving in the opposite direction or decelerating, then the action is
Braking = eccentric
Agonist
Muscle whose role is to produce a desired motion
- Example: Anterior Tibialis is the agonist for dorsiflexion
Antagonist
Muscle whose action counteracts the agonist (i.e. moves the joint in the opposite direction)
- Example: Gastrocnemius is an antagonist to Anterior Tibialis