Biomechanics Angular Kinetics In Class Notes
1/44
Earn XP
Description and Tags
Module 8
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
45 Terms
What is Angular Power?
The rate of change in angular work
Is power a vector or a scalar ?
scalar
What are the units of power?
watts (J/s)
Equation for angular power?

torque and angular velocity
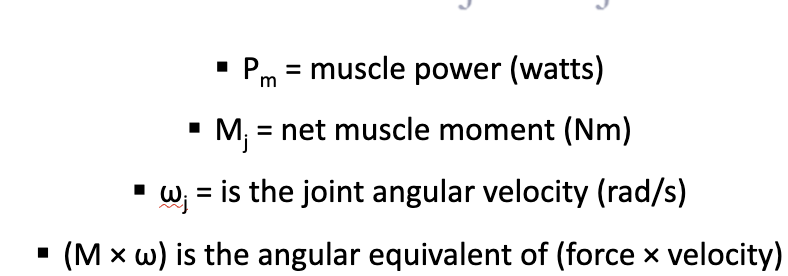
What is Muscle Power determined by
calculating net torque at the joint and angular velocity of the joint
Muscle Power equation?
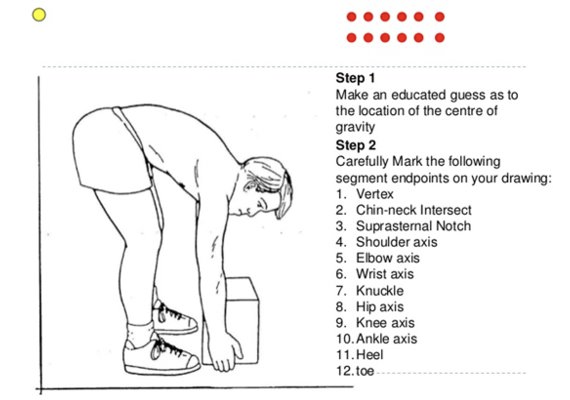
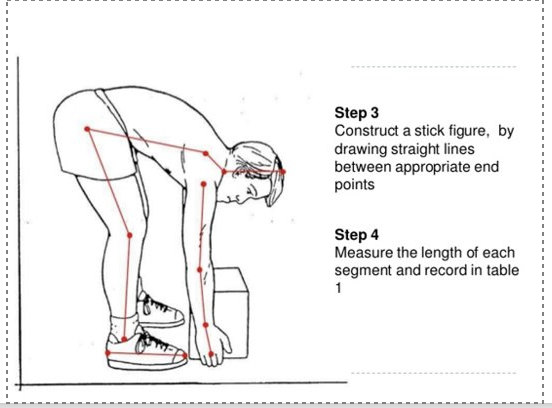
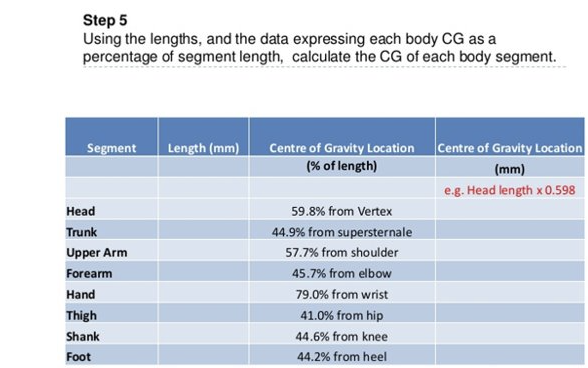
The segmental method is the estimation of the
location of the body’s total center of gravity
each individual segment has its own center of gravity
standard set of values for mass ratio and center of gravity for each body segment is used
Cartesian coordinates are obtained for each segment (tells us our x,y)
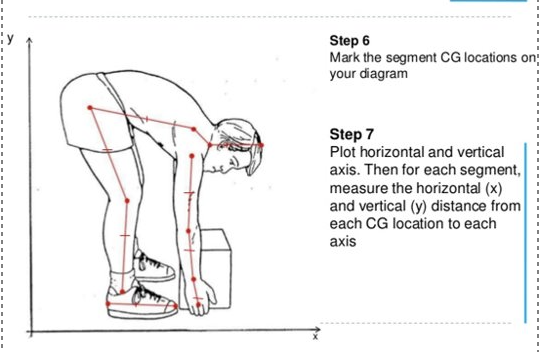
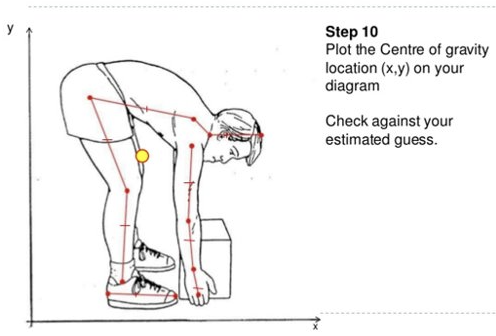
What does segmental method steps look like?
During Newtons First Law (Law of Inertia) during angular pov
A body continues in a state of rest or uniform rotation about its axis unless acted upon by an external torque
Eccentric force: force applied off-center
Forces generated by the muscle
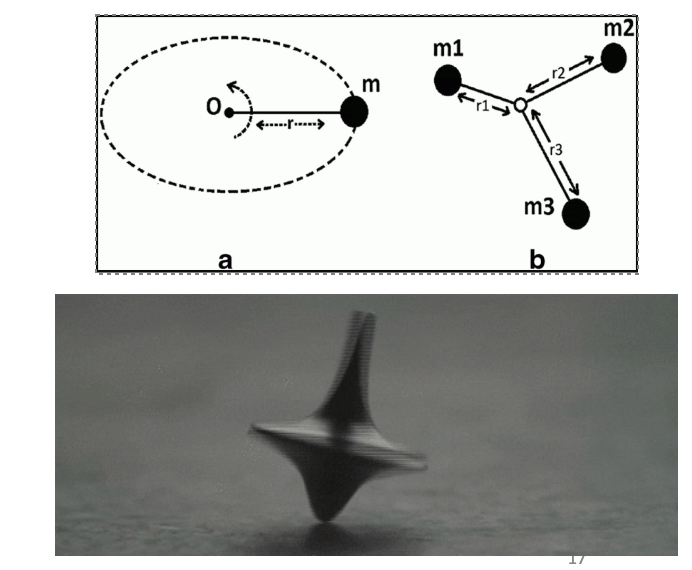
Angular inertia
Mass distribution about an axis of rotation (i.e., joint) may be altered by changing the limb position (i.e., bringing the limb in closer to the axis of rotation by flexing at a joint
ex ) constant angular velocity: fan spinning
ex) at rest: fan not spinning
Many concepts of angular inertia are similar to ?
linear kinetics
Linear Inertia is
resistance of a body to changing motion
Angular Inertia is the property of
an object to resists changes in its angular motion
its not just dependent on mass
Center of mass can
move
Moment of Inertia quantifies
how an objects mass is distributed relative to a specific axis of rotation
During moment of inertia, a mass that is farther from the axis has
more angular resistance
During moment of inertia, a mass that is closer to the axis has
less angular resistance
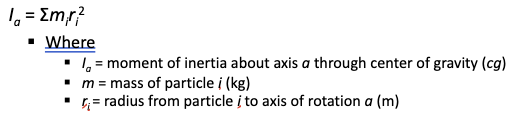
Moment of inertia considers each individual
mass particle
Moment of Inertia mathematical equation?
Radius of gyration is the
radial distance of that point, from the axis of rotation at which the whole mass of the body is supposed to be concentrated
Simpler approach to consider mass distribution
Rotating body’s resistance t angular acceleration or deceleration is equal to
Product of the mass
Square of its perpendicular distance from the axis of rotation
Moment of inertia depends on?
mass
distribution of the mass
Moment of inertia determines the torque needed for
a desired angular acceleration about a rotational axis
Distribution has a greater effect
Double the mass = 2 × Inertia would double
Double the radius of gyration = 4 × Inertia would quadruple) because the r is squared!
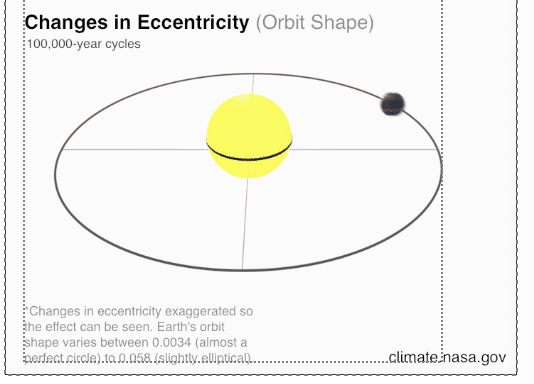
Moment of inertia about eccentric axes says
Not all rotation occurs around the center of gravity
Eccentric axis → implement axis not passing through the center of gravity
The performer holds the “grip” or “end” of the implement, not the center of gravity. EX) Bat, hammer, stick, racket
The new axis is called → parallel axis
Mass farther from the axis of rotation means I is greater
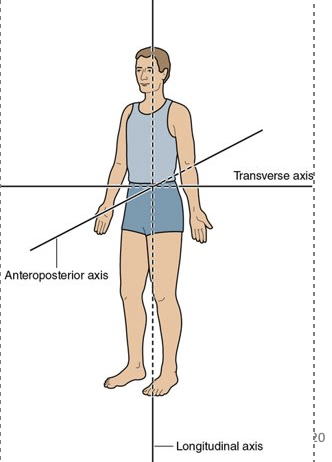
What are the principle axes in the human body?
Anteroposterior (cartwheel)
Transverse (somersault)
Longitudinal (twist)
The moment of inertia around each axis depends on?
the position or orientation of the limbs relative to the axis
Manipulating the moments of inertia of the human body is when you alter the
relative angle at a joint or joints changes / by changing the mass distribution around a joint axis
Sprinter’s leg during recovery phase
Swinging a tool
Altering the relative angle at many joints changes the Icg by changing the mass distribution around the cg
Arm use by figure skaters when spinning
Tuck versus layout position of divers and gymnasts in somersaults

moment of inertia center of gravity
Angular momentum quantifies the
angular motion of an object, describing both current state of motion and resistance to changing motion
Angular momentum is a vector or scalar?
vector
Magnitude: Iω (units: kg∙m²/s)
Direction: same as direction of ω (Follows right-hand rule conventions)

Tangential velocity (Vt) and Moment of Inertia (I) is greater with
longer radius
The trade-off when choosing length of swinging implement is
Ease of swing versus effectiveness of velocity achieved
Bat, stick, racket, hammer
For angular momentum of the human body, frequently many limbs rotate at
different ωs
Ha of body is the sum of angular momenta of individual segments
(H is angular momentum)
For Newtons First Law, (Angular Interpretation), angular momentum of an object remains constant unless
a net external torque acts on it
If Is are constant, ω is constant
For Newtons First Law, (Angular Interpretation), for a rigid projectile, gravity is the
only external force
Weight acts through the cg
Weight has no moment arm around the cg
No external force on body
Weight creates no external torque on a projectile
Newtons First Law (Angular Interpretation) : H (product of l and ω) remains constant unless
a net external torque acts on the rotating body
Newtons First Law (Angular Interpretation): Human body is a system of
rigid links with a modifiable I
With H constant (no external torque applied)
-Increase in I, there must be a proportional decrease in ω
-Decrease in I, there must be a proportional increase in ω
For faster spin, reduce I (tuck, arms in)
For slower spin, increase I (layout, arms out)
When talking about Controlling ω of Limbs or Trunk, Hcg remains
constant while a projectile
Individual segments have Hi/cg from I and ω
Repositioning one or more segments of a body must be countered by
repositioning one or more segments in the opposite direction to maintain constant Hcg
Repositioning means changing ω
Newton’s Second Law: Angular Interpretation, if a net external torque acts on a body, the body will angularly
accelerate in the direction of the net external torque
Newton’s Second Law: Angular Interpretation, acceleration will be
Directly proportional to the torque
Inversely proportional to its moment of inertia
It is similar to newtons second law for linear motion
Newton’s Second Law: Angular Interpretation, angularly accelerate is a
change in angular momentum
the change in angular momentum of an object is proportional to the
net external torque exerted on it and the changes is in the direction of the net external torque
Torquea and ωa have same sign: Ha increases
Torquea and ωa have opposite sign: Ha decreases
If I changes when T applied, change in ω is
greater
Newton’s Third Law: Angular Interpretation, for every torque exerted by one object on another, the other object exerts an
equal torque back on the first object but in the opposite direction
Newton’s Third Law: Angular Interpretation, torque on each body is of equal
magnitude, not the effect
