Statistics
1/71
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
72 Terms
Probability versus Inference
Probability models are the basis for understanding random phenomena, for which we repeat an experiment, but obtain a (slightly) different result.
Statistical inference is the science of drawing conclusions from experiments when the results could have come out differently if we repeated the experiment.
population
the entire collection of objects or outcomes about which we are seeking information
sample
a subset of a population, containing the objects or outcomes that are actually observed
simple random sample (SRS)
a sample of size n is a sample chosen by a method where each collection of n population items is equally likely to comprise the sample
conceptual population
a population that consists of all the values that might possibly have been observed
independence in a sample
The items in a sample are independent if knowing the values of some of the items does not help to predict the values of the others.
Items in a simple random sample may be treated as independent in many cases encountered in practice. The exception occurs when the population is finite and the sample comprises a substantial fraction (more than 5%) of the population.
one-sample experiment
an experiment where there is only one population of interest, and a single sample is drawn from it
multisample experiment
an experiment where there are two or more populations of interest, and a sample is drawn from each population
factorial experiment
a multisample experiment where the populations are distinguished from each other by the varying of one or more factors that may affect the outcome
numerical/quantitative data
data with a numerical quantity designating how much or how many is assigned to each item in a sample
categorical/quantitative data
data where sample items are placed into categories, and category names are assigned to sample items
controlled experiment
an experiment where the values of the factors are under the control of the experimenter in order to produce reliable information about cause-and-effect relationships between factors and response
observational study
an experiment where the experimenter simply observes the levels of the factor as they are, without having any control over them
sample mean
the arithmetic mean or average of the observations in the sample (the sum of the numbers in the sample divided by how many values there are); a measure of where the “center” of the data set is
deviation
the distance of a data value from the sample mean
sample variance
an adjusted average of the squared deviations
sample standard deviation
the (positive) square root of the sample variance
outlier
a data point that is either much larger or smaller than the rest of the data (because of measurement error, data entry error, or just because it’s different); in general values more than 1.5 x IQR from the closer of Q1 and Q3
sample median
the middle number in a data set
quartile
the quartiles divide the data set into quarters
first quartile, Q1: the data value in position (0.25)(n + 1)
third quartile, Q3: the data value in position (0.75)(n + 1)
interquartile range (IQR)
the measure of variability that is associated with the quartiles
IQR = Q3 - Q1
robust statistic
a statistic where removing the outliers does not change its value very much
stem-and-leaf plot
Select one or more leading digits for the stem values. The trailing digits become the leaves.
List possible stem values in a vertical column.
Record the leaf for every observation beside the corresponding stem value.
Indicate the units for the stems and leaves someplace in the display.
histogram
Divide the variable into discrete regions that partition the possible values of the variable, called classes, and construct class intervals of equal width.
Determine the frequency and relative frequency for each class.
Mark the class boundaries on the horizontal axis.
Above each class interval, draw a rectangle whose height is the frequency or relative frequency.
relative frequency
the relative frequency of a value is the proportion of units that have that value
When examining the distribution of data, what four aspects must we describe?
Shape
Modes: unimodal, bimodal, or multimodal?
Symmetry: symmetric, right-skewed, or left-skewed?
Center (e.g., mean or median)
Variability (e.g., standard deviation or IQR)
Outliers (unusual observations)
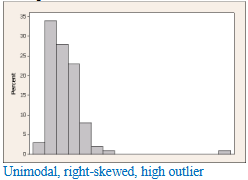
right-skewed (positively skewed)
lower values of the variable are more common with fewer and fewer observations having larger values of the variable; the right “tail” of the distribution is longer than the left tail
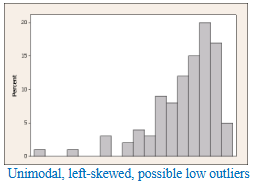
left-skewed
higher values of the variable are more common with fewer and fewer observations having smaller values of the variable; the left “tail” of the distribution is longer than the right tail
five-number summary
minimum
first quartile
median
third quartile
maximum
boxplot
graphical display of the five-number summary:
minimum
first quartile
median
third quartile
maximum
extreme outlier
in general, an outlier more than 3 x IQR from the closer of Q1 and Q3
How do we choose which values to use to describe the center and variability of a distribution?
unimodal and roughly symmetric: use mean and standard deviation
skewed and/or has outliers: use median and IQR (or the five-number summary)
experiment
a process that results in an outcome that cannot be predicted in advanced with certainty
sample space, S
the set of all possible outcomes of an experiment
event, E
a subset (collection) of outcomes from the sample space
simple event
an event with exactly one outcome
compound event
an event with more than one outcome
null event
an event with no outcomes
complement of an event
denoted AC (for an event A), is the event that consists of all outcomes of S that are not in A
union of events
denoted A ∪ B, is the event consisting of all outcomes that are in at least one of the events A or B
intersection of events
denoted A ∩ B, is the event consisting of all outcomes that are in both of the events A and B
mutually exclusive events
events that never occur together: A ∩ B = ∅
exhaustive events
events where their union is the entire sample space: A ∪ B = S
probability
the probability of an event A, written P(A), is the proportion of times that event A would occur in the long run if the experiment were repeated over and over again under the same experimental conditions
probability model P( )
a function that satisfies the following axioms:
P(S) = 1
For any event A, P(A) ≥ 0
If events A1, A2, … are mutually exclusive, then P(A1 ∪ A2 ∪ …) = P(A1) + P(A2) + …
complement rule
for any event A, P(AC) = 1 - P(A)
general addition rule
for two events A and B, P(A ∪ B) = P(A) + P(B) - P(A ∩ B)
(if A and B are mutually exclusive, then P(A ∪ B) = P(A) + P(B))
the conditional probability of event A given that event B has occurred
P(A|B) = P(A ∩ B) / P(B)
(this provides another method for computing P(A ∩ B), which is the general multiplication rule: P(A ∩ B) = P(B)*P(A|B)
independent events
two events A and B are independent if
P(A|B) = P(A)
P(B|A) = P(B)
P(A ∩ B) = P(A)P(B)
(if one is true, they are all true)
mutually independent events
events A1, A2, …, An are mutually independent if the probability of each remains the same no matter which of the others occur
law of total probability
if A1, A2, …, An are mutually exclusive and exhaustive events, and B is any event, then P(B) = P(A1 ∩ B) + … + P(An ∩ B)
equivalently, P(B) = P(A1)P(A1|B) + … + P(An)P(An|B)
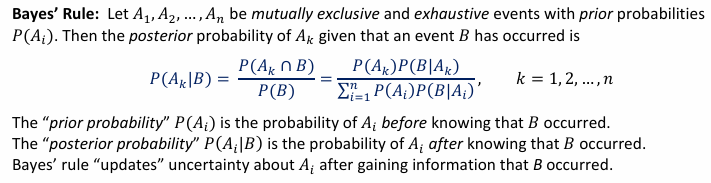
prior probability
the prior probability P(Ai) is the probability of Ai before knowing that B occurred
posterior probability
the posterior probability P(Ai|B) is the probability of Ai after knowing that B occurred
Bayes’ Rule
the posterior probability of Ak given that event B has occurred
random variable
A random variable (RV) assigns a numerical value to each outcome in a sample space. It is customary to denote random variables with uppercase letters
discrete random variable
A random variable is discrete if its set of possible values is a finite or countably infinite set of individual points. This means that if the possible values are arranged in order, there is a gap between each value and the next one.
distribution of a random variable
A distribution of a random variable describes the values that the variable can take on and the probabilities that it takes on those values.
probability mass function
The probability mass function (pmf) of a discrete random variable 𝑋 specifies the probability that a random variable 𝑋 takes on value 𝑥:
𝑝(𝑥) = 𝑃(𝑋 = 𝑥)
for any real x, p(x) = 0
the sum of p(x) for all x = 1
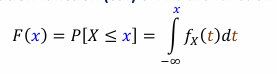
cumulative distribution function
The cumulative distribution function (cdf) of a random variable 𝑋 specifies the probability that a random variable 𝑋 takes on a value that is less than or equal to 𝑥:
𝐹(𝑥)=𝑃(𝑋 ≤ 𝑥).
Note: For a discrete random variable, the graph of 𝐹(𝑥) consists of a series of horizontal lines (called “steps”) with jumps at each of the possible values of 𝑋. The size of the jump at any point 𝑥 is equal to the value of the probability mass function 𝑝(𝑥) at that point 𝑥𝑥.
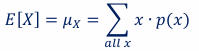
mean of discrete random variable
the sum of x*p(x) for all x
The mean of X is sometimes called the expectation or the expected value of X.
variance of a discrete random variable

standard deviation
The standard deviation is the (positive) square root of the variance:

continuous random variable
A random variable is continuous if its set of possible values is an interval (with finite or infinite endpoints)
For any continuous random variable X and any number c, 𝑃(𝑋 = 𝑐) = 0
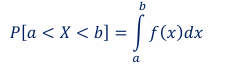
probability density function
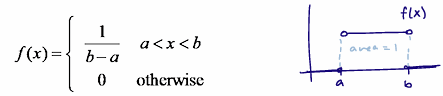
Distribution of a continuous random variable is described by the probability density function (pdf), denoted by 𝒇(𝒙), where probabilities for a continuous random variable are the areas under the pdf
the integral from negative infinity to infinity of a pdf is 1
f(x) >= 0 for all x
uniform distribution
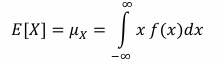
mean of a continuous random variable
variance of a continuous random variable
median of a continuous random variable

100pth percentile
if 𝑝 is a number between 0 and 1, the 100pth percentile is the point 𝑥100p that solves the equation:

jointly distributed random variables
When two or more random variables are associated with each item in a population, the random variables are said to be jointly distributed.
If all the random variables are discrete, they are said to be jointly discrete. If all the random variables are continuous, they are said to be jointly continuous.
joint probability mass function
If X and Y are jointly discrete random variables, the joint probability mass function (joint pmf) is:
for all (x,y), pXY(x,y) >= 0
the sum of all pXY(x,y) for all (x,y) = 1
