Linear Algebra Final: Terms and Practice
1/32
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
33 Terms
Vector
a matrix of size 1 x n or m x 1
s:= (s1,…, sn) (row vector)
or
x:=(x1,…,xm)T (column vector)
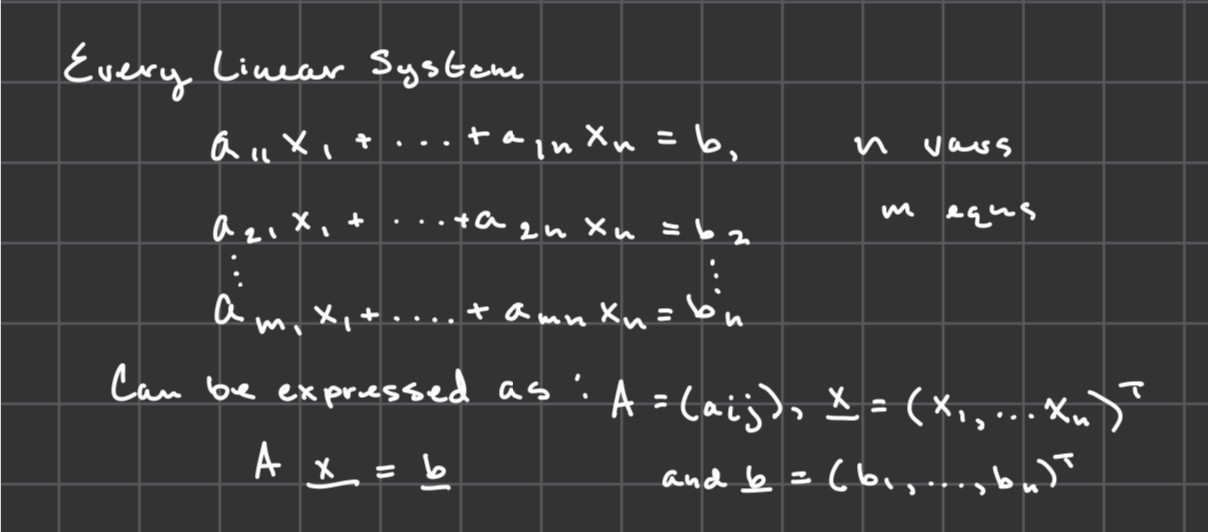
Matrix
an m x n matrix is an array of numbers:
A:=
(a11 a12 … a1n,
a21 a22 … a2n
.
.
.
am1 am2 …amn)
What can solution sets contain?
they can be empty, 0, 1 thing, or infinitely many things
Matrix product/Dot product
If v = (v1,…, vn), and w = (w1,…,wm)T are vectors, then the dot product v dot w := (v1w1 +…+vnwm) ∈R
For dot product v must have the same number of rows as w has columns or be a square matrix. vw and wv are not the same product.
Row Operation Rules
Switch two rows
Scale a row
Replace a row with the sum of rows
For homogenous systems
-there is always at LEAST a trivial solution
-it is consistent (no empty rows/sets)
To find pivots and free variables
-put into REF (row eschelon form)
-if last column has no pivot, and there is a zero, the zero is the given free variable
Reduced Row Eschelon Form (RREF)
Any non-zero row comes before all zero rows
Any non-zero row has first entry 1, and zeros above and below leading 1
leading ones must stagger to the right, creating stair step

RREF U thm
Every matrix A can be put into RREF U by row operations and moreover U is unique. Thus, solutions to Ax=0 and Ux=0 are the same.
For inhomogeneous systems such as Ax=b, b≠0, there are 2 ways to solve
Augmented matrix
Transfer Principle
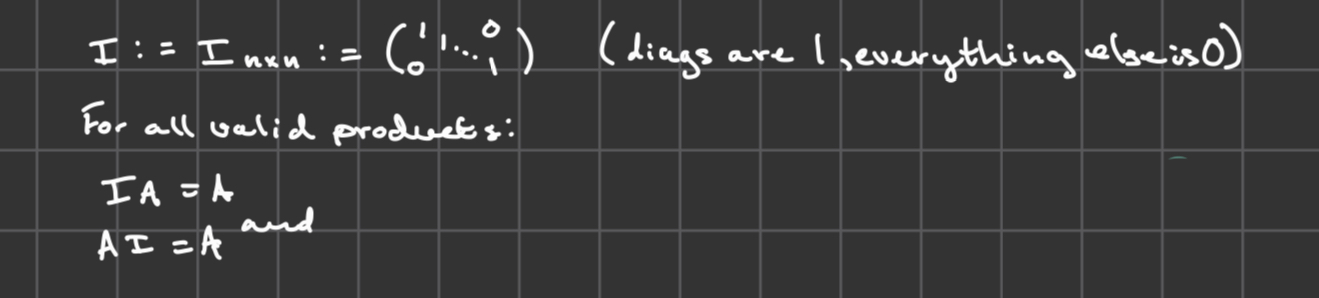
A square matrix A is invertible if there is a matrix A-1 such that:
A-1A= I
AA-1= I
If A= (a b, c d) then,
A-1 = (1/ad-cb)(d -b, -c a)
A is not invertible if ad-cb=0
If A in invertible, any system Ax=b has one unique solution: x= Ix = A-1Ax = A-1b.
So, a square matrix A is invertible iff its RREF is U=I.
Transfer Principle
Let A be a matrix and Sh : {sh: Ash = 0} the set of solutions to Ax = 0. For any b with a particular solution sp to Ax = b, i.e. Asp=b, the solutions to Ax=b is {sp + sh: sh∈ Sh}
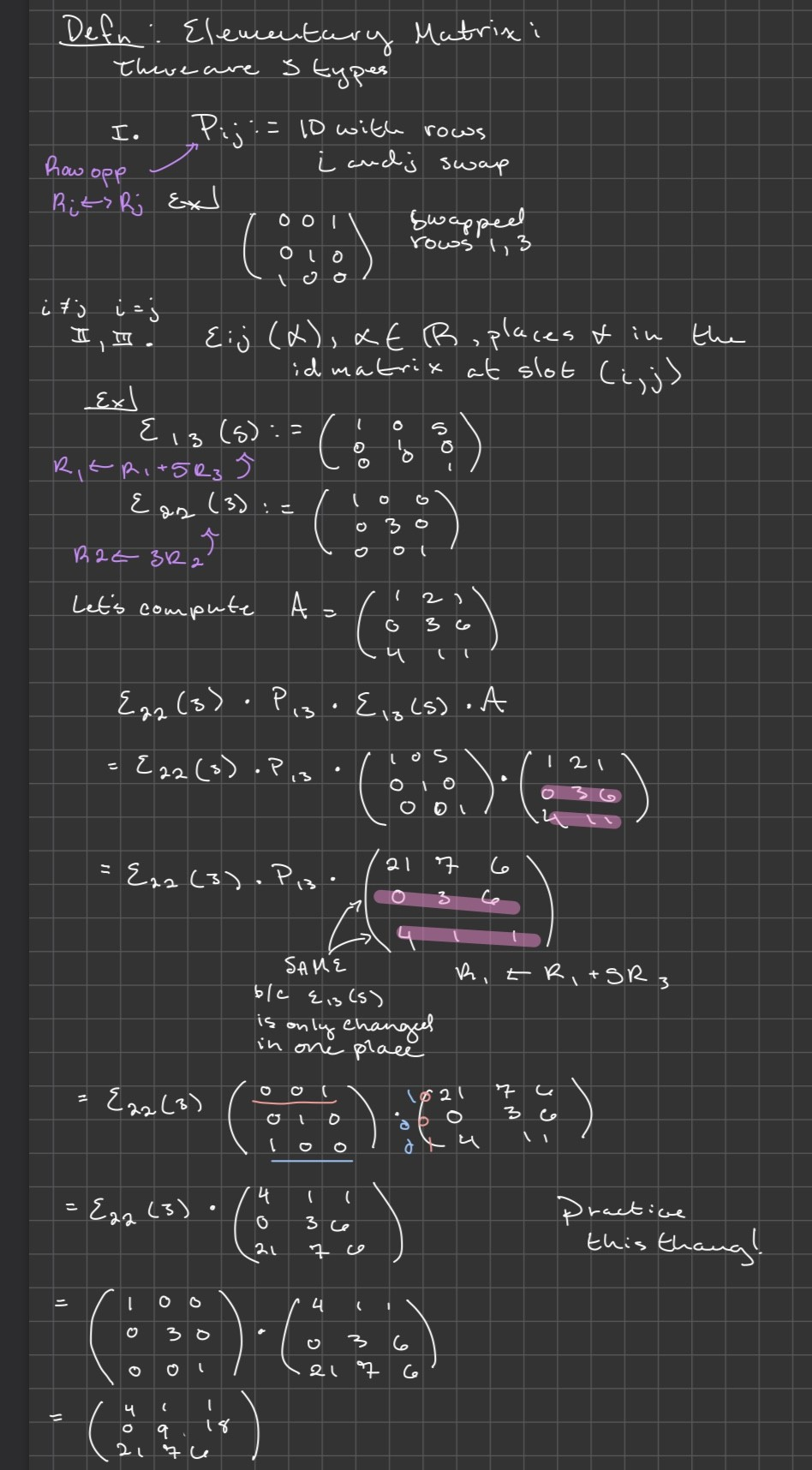
Elementary matrices: 3 types
Pij: identified as an identity matrix with ij rows swapped
(i≠j), 3. (i=j), Eij (α): identified as α∈R, places α in the identity matrix at slot (i,j)
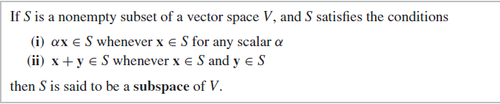
Subspace of a vector space
If it meets these properties, the subset is a subspace. Use generic elements to prove that it is one, and specific elements (witnesses) to prove that it is not! (If any of the functions are non-linear, it is more than likely not a subspace)
Linear Combinations
Fix v1, … ,vn in Rα.
A linear combination of v1, …, vn is a vector of the form c1v1+ …+ cnvn for c1,…,cn ∈ R.
Defn Spanning set
For β:={v1,…,vx} ∈Rd, a finite set. We set
Span(β):={c1v1+ …+ cnvn: c1,…, cn∈R} ⊆Rd, the set of all linear combinations of v1,…, vn.
Span(β) is always a subspace
Every subspace V ⊆ Rd, V=Span(β), for any finite set β
We call β a spanning set for V.
Null space
Null(A):={x ∈ Rn: Ax=0} ⊆Rn
Is the solution to the homogeneous system, called the Null Space of A.
Null(A) is always a subspace
Let s1, s2 ∈ Null(A) generic α∈R.
As1=0, As2=0 and A(s1 + s2)=0
A(αs1) = α(As1)= α * 0 = 0.
Linear independence and Basis Definition
Fix β = {v1,…,vn} ∈Rd.
We call β linearly independent provided:
c1v1+ …+ cnvn=0 => c1=0, c2=0,..., cn=0
If β is not linearly independent, we say β is linearly dependent.
We call a set β a basis for a subspace V if:
β is a spanning set for V
there are c1,c2, ∈ R such that c1b1+ c2b2=b
iff Ac=b i.e. Ax=b has a solution
β is linearly independent
iff Ax = 0, A=(—b1—,…, —bn—)T
dim(V) is the same size as any basis, bn ⊆ V
dim(Rd) = d,
as Rd = Span{e1,…, ed}.
Thus any set β with #β>d cannot be linearly independent, and #β<d cannot be a spanning set for Rd.
Moreover, #β=d, then β is linearly independent iff β is a spanning set for Rd.
Three important subspaces attached to an m x n matrix A:
Null Space
Null(A) := {x ∈ Rn: Ax=0} ⊆ Rn
dimNull(A):= nullity(A) [num of free vars!!]
Row Space/Rank
Row(A):= Span(rows of A) ⊆ Rn
Rank(A) = dimRow(A)
Column Space
Col(A) = Span(cols of A)
Rank- Nullity Theorem
For A, an m x n matrix,
Rank(A) + nullity(A) = n = number of columns
β coordinate of v definition
if V is a subspace and β = {b1,…,bn} is a basis for V,
every vector v ∈ V, has a unique linear combination (c1, c2,…,cn)T such that
v= b1c1+…+bncn, we call
[v]β:= (c1, c2,…,cn)T the β coordinates of v.
Change of basis: is a matrix
Fix V a vector space with basis’ β, β’.
For any vector v ∈ V, we can calculate
[v]β ∈Rd
[v]β’ ∈Rd.
There is an invertible d x d matrix(change of basis matrix):
Aβ→β’ such that
Aβ→β’[v]β=[v]β’.
(therefor [v]β=A-1β→β’[v]β’)
So
A-1β→β’=Aβ’→β.
Injective
β is linearly independent
Surjective
β is a spanning set for V
Bijective
Injective and surjective
Linear Transformation definition
Let V, W be two vector spaces. A Linear Transformation is a function L: V→W such that
L(v1 + v2) = L(v1) + L(v2)
L(αv1) = αL(v1)
For all α ∈ R, v1, v2 ∈ V.
Linear Operator definition
If V = W, we call a linear transformation L: V→V a linear operator
Kernal of L and Image of L-
2 important subspaces attached to a linear transformation
Ker L := {v ∈ V: L(v) = 0} ⊆ V
Information lost by L
Im L ;= {w ∈ W: there is v ∈ V, L(v) = w} ⊆ W
What L touches
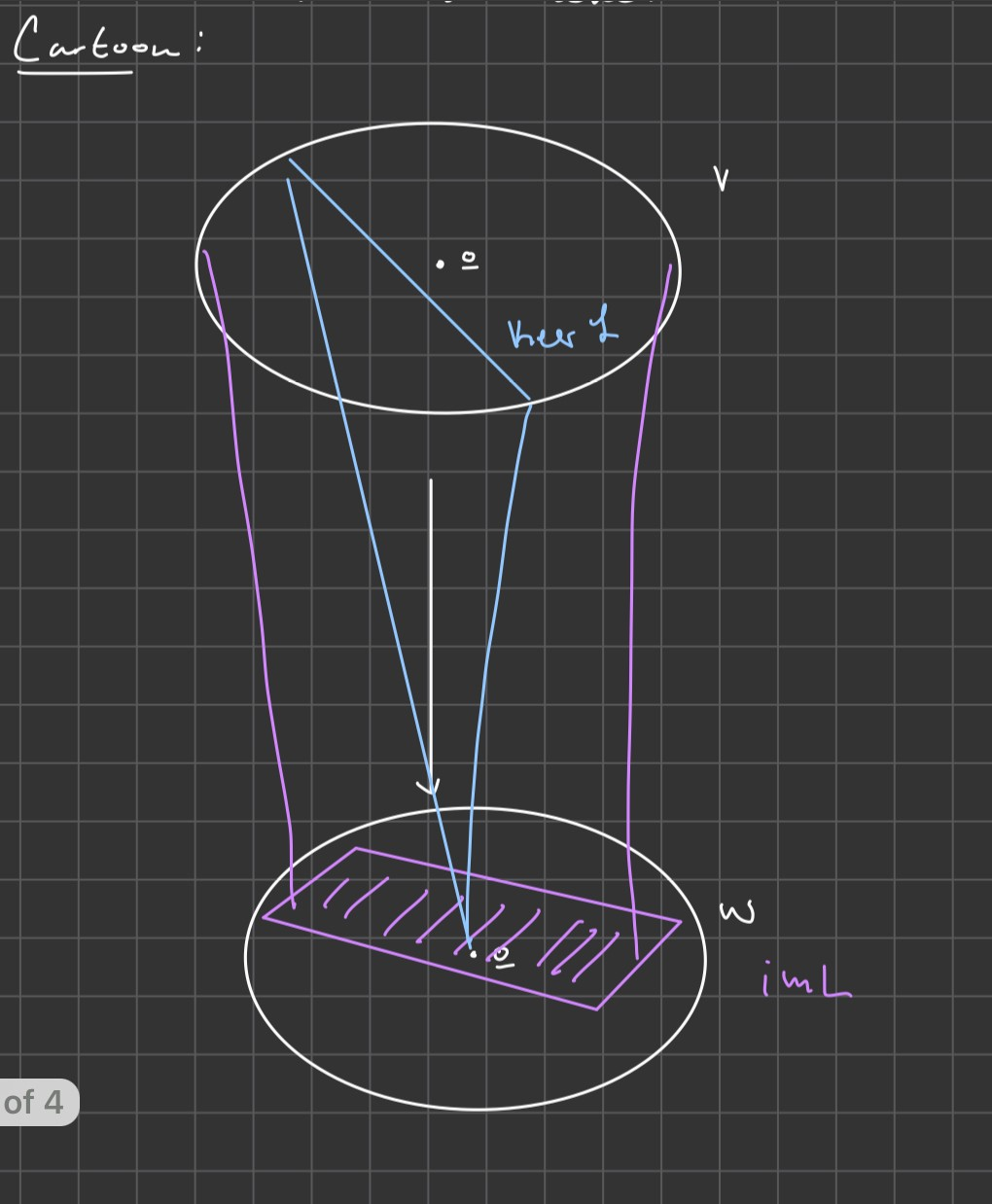
Correspondence for any linear transformation: L: V →W:
Pick basis βv for V, dv := dimV; βw for W, dw := dimW,
then correspondance:
[—]βv
V→Rdv
v |→ [v]βv
[—]βw
W→Rdw
w |→ [w]βw.
Under these identifications,
as
[L(v)]βw = [L]βvβw * [v]βv.
So. this identifies:
kerL ∈ V with Null([L]βvβw) ∈ Rdv
and
imL ∈ W with Col([L]βvβw) ∈ Rdv
By definition L is surjective iff imL = W, and L is injective iff kerL = {0}.
L(v1) = L(v2) iff
L(v1) - L(v2) = 0
= L(v1 - v2),
So v1 - v2 ∈ kerL
For each L we obtain a #, vol(L)
Systematic process to find
vol[L] from [L]βvβw. This is called the determinate.
Thm: for L : V → W linear transformation:
|det [L]βvβw| = vol(L) for any choice of basis.
![<p>Systematic process to find</p><p>vol[L] from [L]<sub>βv</sub><sup>βw</sup>. This is called the determinate.</p><p>Thm: for L : V → W linear transformation:</p><p>|det [L]<sub>βv</sub><sup>βw</sup>| = vol(L) for <strong>any</strong> choice of basis. </p>](https://knowt-user-attachments.s3.amazonaws.com/6d0d9ad6-6fdd-434f-94da-e3c8a54254fe.png)