Linear Algebra Prelim 1 stuff
1/15
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
16 Terms
linear combination (definition)
adding vectors of different weights creates a new vector. we say that this new vector is a linear combination of the added vectors.
the weights can include zero
this will tie into span
span (defintion, vector b in span{v1,…vp} mean? geometric description, linear combination)
definition: span{v1,…vp} is the collection of all vectors that can be written in the form c1v1 + c2v2 + …. +cpvp. c are the scalaras.
vector b is in Span {v1, …, vp}?: we have to find whether the vector equation has a solution. we find if the augmented matrix [ v1 … vp b] has a solution.
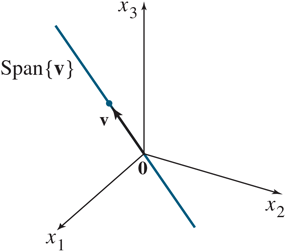
geometric description:
with vector v in R³ , span{v} is the set of all scalar multiples of v, which is the set of all points on the line in R³ through v and 0.
span{u, v} , if the vectors aren’t multiples of each other, this will create a plane in R³ that contains u, v, and 0.
linear combination: span is really all linear combinations of something
![<p>definition: span{v1,…vp} is the collection of all vectors that can be written in the form c1<strong>v</strong>1 + c2<strong>v</strong>2 + …. +cp<strong>v</strong>p. c are the scalaras.</p><p>vector <strong>b </strong>is in Span {<strong>v1</strong>, …, <strong>vp</strong>}?: we have to find whether the vector equation has a solution. we find if the augmented matrix [ <strong>v1 </strong>… <strong>vp</strong> <strong>b</strong>] has a solution.</p><p>geometric description: </p><ul><li><p>with vector <strong>v </strong>in <strong>R³</strong> , span{<strong>v</strong>} is the set of all scalar multiples of <strong>v</strong>, which is the set of all points on the line in <strong>R³ </strong>through <strong>v </strong>and <strong>0</strong>. </p></li><li><p>span{<strong>u, v</strong>} , if the vectors aren’t multiples of each other, this will create a plane in <strong>R³</strong> that contains <strong>u</strong>, <strong>v</strong>, and <strong>0. </strong></p></li></ul><p>linear combination: span is really <strong>all linear combinations</strong> of something</p>](https://knowt-user-attachments.s3.amazonaws.com/d4b0ed1e-8bd1-4c1c-9055-7b9824c92e60.jpeg)
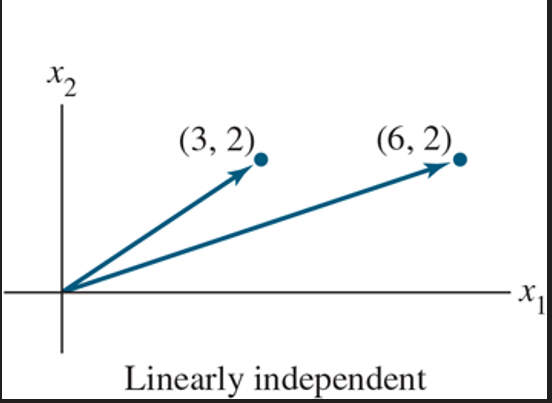
linearly independent (definition for vectors, definition for matrix A, geometric description, what if there are more vectors than entries?)
definition vectors: an indexed set of vectors {v1, …, vp} in R^n is said to be linearly independent if the vector equation
x1v1 + x2v2 + … + xpvp = 0
has only the trivial solution.
can also add that the two vectors are not multiples of each other. two vectors are not a linear combination of the other vector.
definition matrix A: the columns of a matrix A are linearly independent if and only if the equation Ax = 0 has only the trivial solution. This means that there are no free variables in the reduced augmented matrix.
geometric description: its like two different vectors that aren’t on top of each other
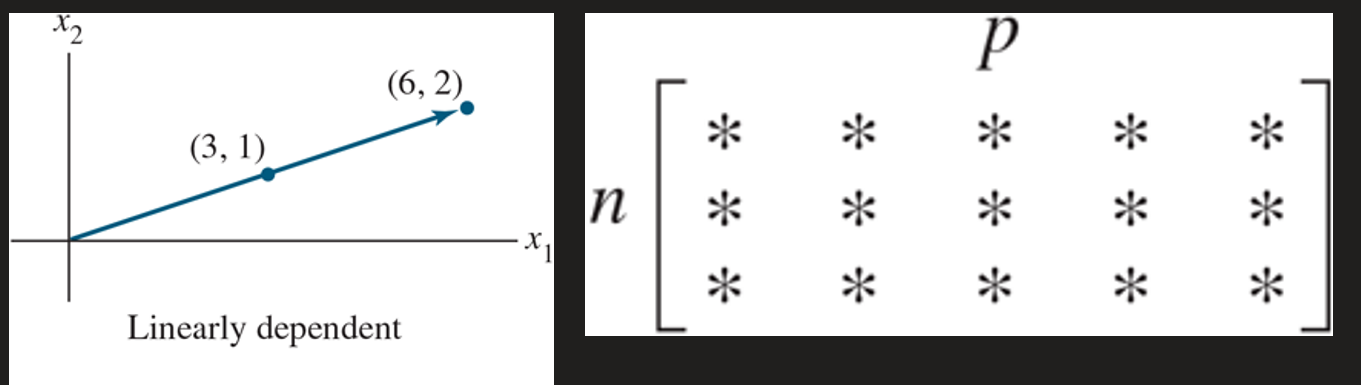
vectors vs entries:
if columns > rows, then the set is linearly dependent. cuz theres gotta be a free variable.
linearly dependent (definition for vectors, geometric description, vectors vs entries)
definition: the set {v1, …, vp} is said to be linearly dependent if there exists weights c1,…cp, not all zero, such that:
c1v1 + c2v2 + … + cpvp = 0
note: zero vector is always linear dependent
a set of two vectors {v1, v2} is linearly dependent if at least one of the vectors is a multiple of the other.
a set of two vectors are linearly dependent if they’re linear combinations of the other. (BUT NOT FOR THE ENTIRE SET), also has to be in span.
geometric description: basically, the vectors are placed right on top of each other (so romantic!!! help)
vectors vs entries: if the vectors (columns) > than entries (rows), then the set is linearly dependent. cuz there’s free variables.
free variable
no constraints to the value of the variable
onto (definition,
a mappings T: R^n → R^m is said to be onto R^m if each b in R^m is the image of at least one x in R^m.
there is a pivot in every row
one-to-one (definition
a mapping T: R^n → R^m is said to be one-to-one if each b in R^m is the image of at most one x in R^n.
there are no free variables
invertible matrix
matrix multiplication (square, non-square)
A^T (Transpose)
identity matrix
invertible matrix formula: 2×2
basic transformations:
reflection across x1 axis
reflection across x2 axis
reflection across x2 = x1
reflection across x2 = -x1
reflection across the origin
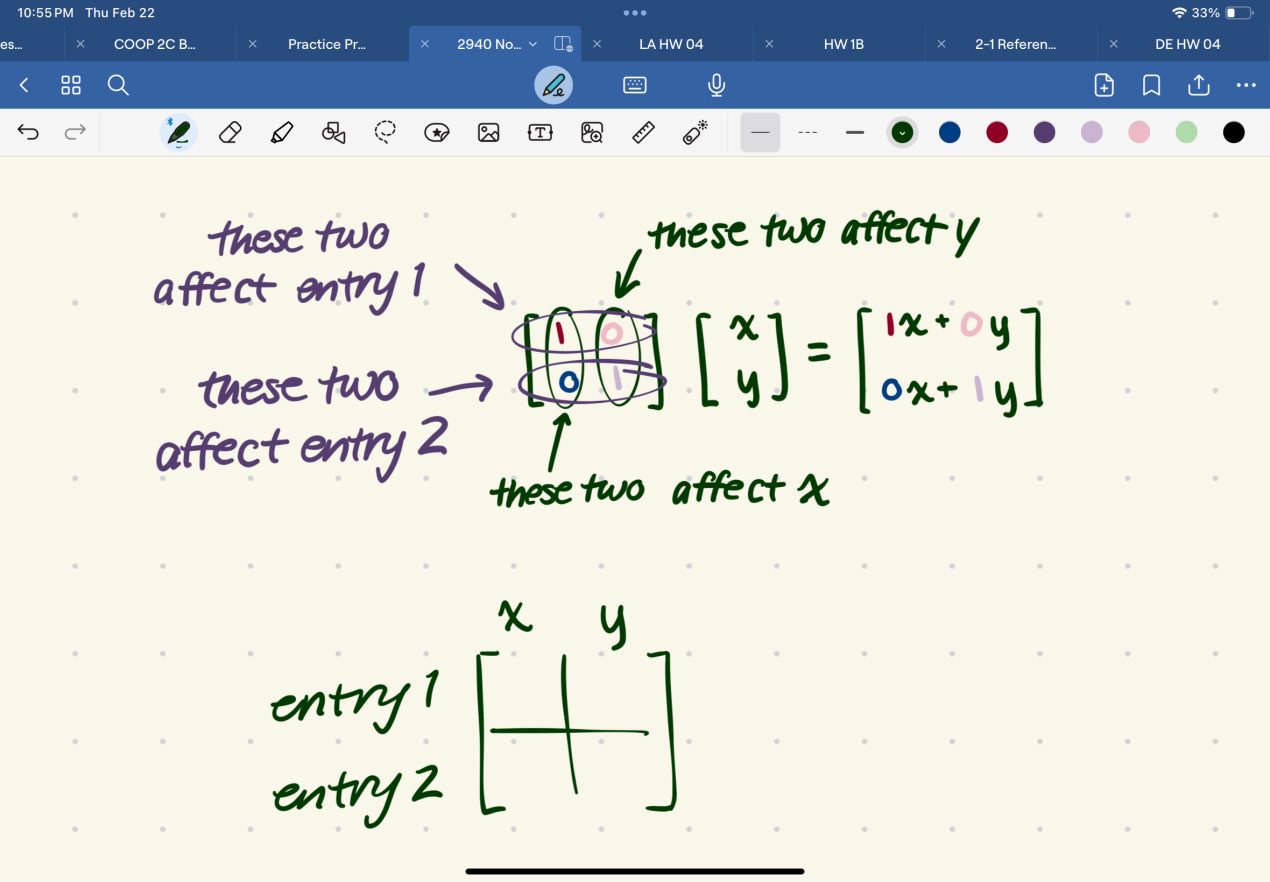
in a 2×2 matrix, tell me which square corresponds to what entry, and what coordinate (x/x1, y/x2)
Reflection across x1 axis:
1 0
0 -1
Reflection across x2 axis:
-1 0
0 1
Reflection through the line x2 = x1
0 1
1 0
Reflection through the line x2 = -x1
0 -1
-1 0
Reflection through the origin
-1 0
0 -1
in a 2×2 matrix, tell me which square corresponds to what entry, and what coordinate (x/x1, y/x2)
a b
c d
a: 1st entry x coordinate
b: 1st entry y coordinate
c: 2nd entry x coordinate
d: 2nd entry y coordinate
mapping (TBD)
homogeneous system (definition, when does have nontrivial solution, geometric description)
defintion: A system of linear equation is said to be homogeneous if it can be written in the form Ax = 0, where A is an m x n matrix and 0 is the zero vector in R^m. Such a system Ax = 0 always has at least one solution, namely x = 0 (the zero vector in R^n). The zero solution is usually called the trivial solution.
So the important thing we want to figure out is if this homogeneous has a nontrivial solution.
If and only if the system has at least one free variable,
then the homogeneous solution has a nontrival solution
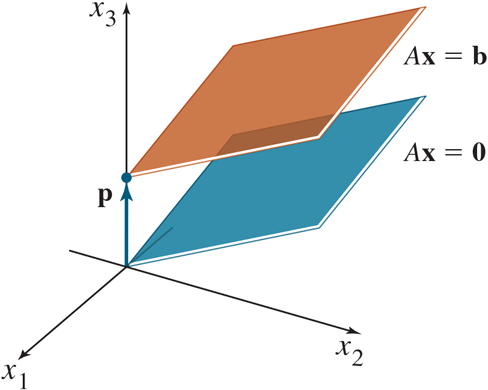
Geometric description: a solution set is a line through 0 in R³
parametric vector form (definition, geometric description)
defintion: an explicit description of the plane as the set spanned by u and v can be written as a parametric vector form.
x = su + tv (s, t in R)
can use this to write solutions to nonhomogeneous linear system
geometric description: if we have a solution to Ax = b, say p, then the solution set of Ax = b is a solution of Ax = 0 + p (Ax = 0 translated p)