15.4 Pendulums
1/3
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
4 Terms
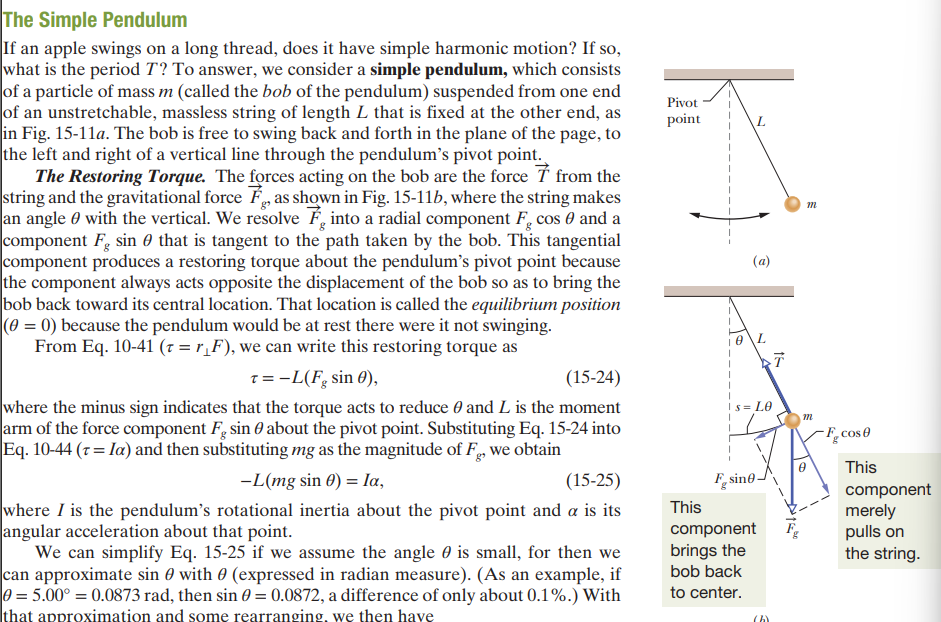
A Simple Pendulum
A type of idealized system in which a blob of mass M is attached to a massless string; the string is then attached to a pivot point and is allowed to oscillate freely about an equilibrium point by a maximum displacement thetamax. 7
Restoring Torque For a Simple Pendulum
When a simple pendulum is allowed to oscillate freely about its equilibrium point, there must exist a force that compels it to return back to the equilibrium position if necessary.
Since we are dealing with rotational motion rather than translational motion, the restoring force is a restoring torque.
The restoring torque is F = F * moment arm of R
F = the component of gravity that is resulting in TANGENTIAL MOTION of the blob about an imaginary arc of motion: mgsin(theta)
R = the length of the string from the pivot point to the blob itself
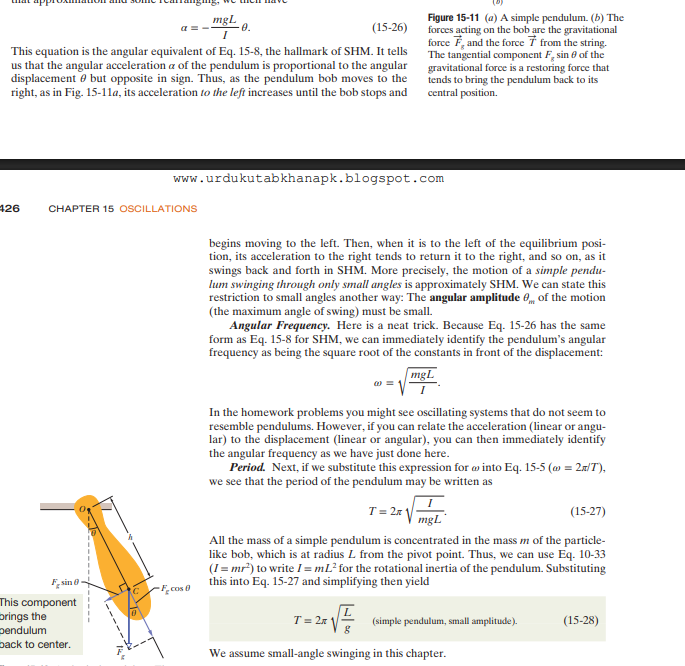
Derivation of the Period of a Pendulum
Since we know that the net torque of an object must equal the product of its moment of inertia and the angular acceleration, we can easily solve for angular acceleration. Furthermore, we also simplify sin(theta) to just theta via the small-angle approximation process for sin(theta).
From here, we obtain:
a = -(mgL/I)(theta)
This is identical to the acceleration of an object in SHM: the acceleration is directly proportional to the negative of its displacement by some constant; in this instance, the constant value is mgL/I.
Recall that the acceleration of any object in SHM is: a(t) = -w²x(t)
In this instance, our x(t) is simply the angular displacement, so x(t) = theta. But we know that w² = mgL/I, so w = sqrt(mgL/I).
We also know that t = 2pi/w, so simply plug in the angular frequency and we obtain:
T = 2pisqrt(L/g)
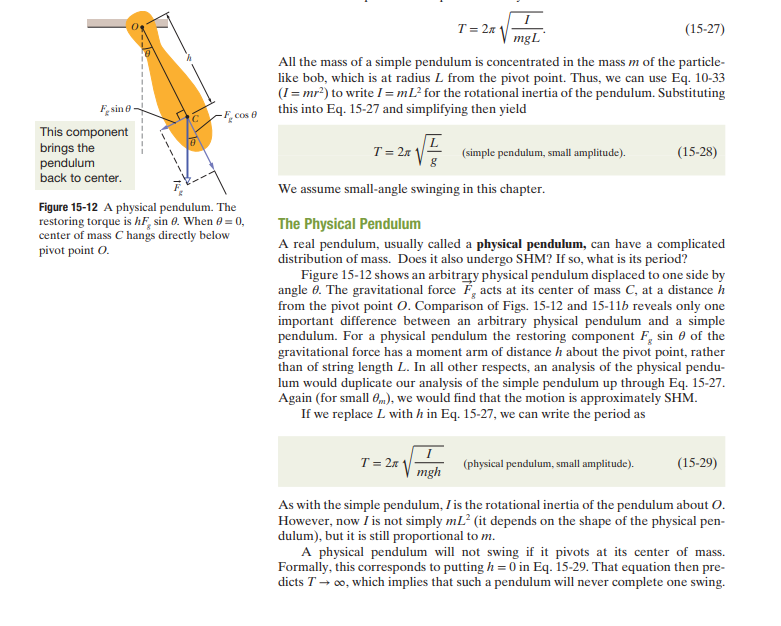
The Physical Pendulum
A physical pendulum is a type of pendulum whose mass is not concentrated at the very blob at the end of the string of the system; rather, the mass is distributed all about the object itself.
In this instance, we use the formula:
T = (2pi)sqrt(I/(mgh))
I = moment of inertia of the object
h = the distance from the pivot point to the object’s center of mass