Geometric Applications of Binary Search Trees
1/28
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
29 Terms
Geometric Applications of Binary Search Trees
Intersection of geometric objects in 1 and 2 dimensional spaces
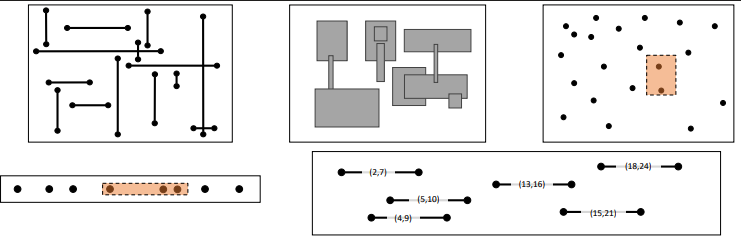
Intersection of Geometric Objects
Orthogonal Line Segment and Rectangle Intersection
1-D & 2-D Range Search, 1-D Interval Search
Orthogonal Line Segment and Rectangle Intersection
Computer Assisted Design (CAD), and CAD for Very Large Scale Integration (VLSI)
For example, designing electronic chip can require:
Wires must not intersect
Wires must have some minimum distance between them
CAD design software helps with checking that
1-D & 2-D Range Search, 1-D Interval Search

Naïve Solutions
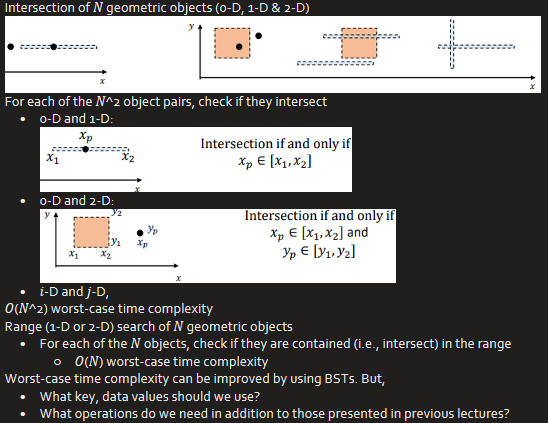
1-Dimension Range Search
Use a Dictionary ADT extension:
void insert(Key key, Value value)
Value Search(Key k)
void delete(Key k)
List rangeSearch(Key keyLeft, Key keyRight)
int rangeCount(Key keyLeft, Key keyRight)
More generally (beyond just geometric search), rangeSearch and rangeCount can be used for database queries
1-Dimension Range Search Worst Case Time Complexity
rangeCount: 𝑶(𝐥og 𝒏) time
Operation rank() takes 𝑂(log 𝑛) time
rangeCount uses rank() twice (four times in code)
rangeSearch: 𝑶(𝑹 + 𝐥og 𝒏) time, where 𝑹 is the number of keys contained in range
Time is a factor of the search path to low key value, as well as to the search path to high key value
And finally factor of all keys in range
Compare to the naïve solution with 𝑂(𝑛) worst-case time complexity
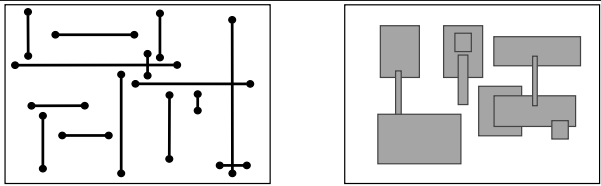
Orthogonal Line Segment Intersection
Given 𝑁 line segments (either horizontal or vertical), find all intersections
Non-degenerate segments: all 𝑥 and 𝑦 coordinates are different
2D problem seems hard, but we have just solved a 1-D problem: 1-D Range Search
Can we reduce our 2-D problem to the 1-D range search?
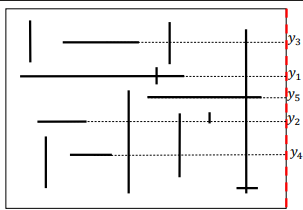
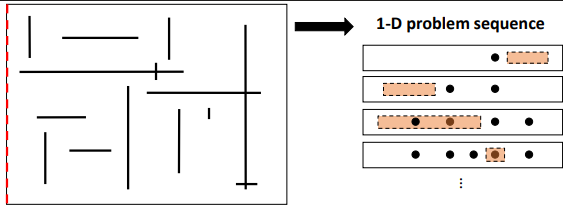
Sweep-Line Algorithm
Transform 2-D problem into a sequence of 1-D range search problem instances
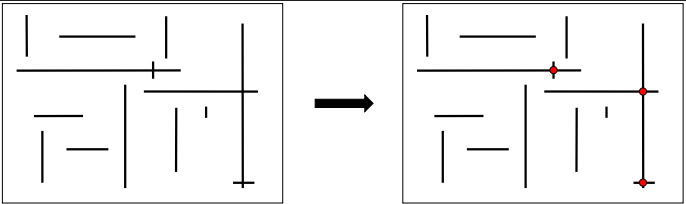
Sweep-Line Algorithm
Create a BST
Insert key 𝑦1
Range search (𝑎1, 𝑎2)
Insert key 𝑦2
Range search (𝑏1, 𝑏2)
Insert key 𝑦3
Insert key 𝑦4
Insert key 𝑦5
rangeSearch(𝑐1, 𝑐2)
Remove key 𝑦1
…
Common technique for solving geometrical problems:
Convex hull,
Convex object intersection,
Voronoi diagrams …
The concept is also used for generating slices in additive 3D printing
Transforming 2-D problem into a sequence of 1-D range search problem instances
At most:
N rangeSearch,
N insertions,
N deletions
Thus it takes time 𝑂(𝑁 log 𝑁 + 𝑅), for R intersections
Worst-case time complexity of intersection: 𝑂(𝑁 log 𝑁 + 𝑅), when there are 𝑅 intersections
Interval Search Tree
Operations:
void insert(Key low, Key high, Value value)
Value search(Key low, Key high)
void delete(Key low, Key high)
LinkedList intersects(Key low, Key high)left endpoint is the BST key
And nodes store max endpoint in subtree (rooted at the node)
Non-degenerate intervals: no two intervals have the same left endpoint
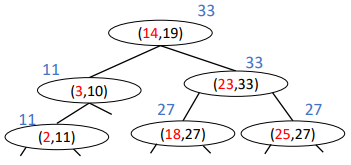
Insertion - Interval Search Tree
void insert(Key low, Key high, Value value)Insert the new node using low as the BST key
Update max in each node on the search path
insert(26,40, *)Intersection - Interval Search Tree
Value intersectionSingle(Key low, Key high):
If interval in node intersects (low,high)-interval, return that interval
Else if left child (and subtree) is null, recurse on right child,
Else if max endpoint of left child (i.e., in left subtree) < low, recurse on right
Else recurse on left subtree
intersectionSingle(20,21)
Intersection Analysis - Interval Search Tree
Proof sketch:
If recurse right, there are no intervals in left subtree that recurse
Max (in left subtree) < low
For any interval (a,b) in left subtree, 𝑏 ≤ max < 𝑙ow
Thus for any interval (a,b) in left subtree, (a,b) does not intersect (low,high)
If recurse left, there is either an intersection in the left subtree or no intersection on either subtree
Recursing on left implies 𝑙ow ≤ 𝑚ax (for max in left subtree)
If no intersection on left subtree, then (c, max) does not intersect (low,high), i.e., ℎ𝑖gh < 𝑐
Since we have a BST ordered by intervals’ left endpoints, for any interval (a,b), 𝑐 ≤ 𝑎
Thus ℎ𝑖gh < 𝑐 ≤ 𝑎, and there are no intersections on the right subtree
Worst-case Time Complexity of intersectionSingle: 𝑂(log 𝑁)
Worst-case Time Complexity of intersection: 𝑂(𝑅 log 𝑁)
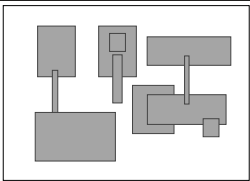
Orthogonal Rectangle Insertion
Find all intersections among a set of 𝑁 orthogonal rectangles
Non-degenerate: All 𝑥 and 𝑦 coordinates are distance
To avoid naïve 𝑂(𝑁^2) time solution, transform/reduce orthogonal rectangle insertion to 1D interval search problem instances
Use Sweep-line algorithm
Interval searches when there are 𝑅 intersections: 𝑂(𝑁 + 𝑅 log 𝑛) worst-case time complexity
Compared to orthogonal line segment intersection -> extra complexity due to the interval search tree implementation
2-Dimension Range Search
Problem definition:
Given 𝑁 points on 2D space, and a 2D range (here, an axis-aligned rectangle), output the points contained in the range
(Count version): … output the number of points contained in the range
Extend the Dictionary ADT to 2D keys:
Insert a 2D key
Delete a 2D key
Search for a 2D key
rangeSearch: find all keys that lie in a 2D range
rangeCount: number of keys that lie in a 2D range
For our use, Keys are points in the plane and we want to find/count points in a given axis-aligned rectangle
Grids
Extend Dictionary ADT to 2D keys via a grid implementation (array analogue):
Divide space into an M-by-M grid (i.e., decide on grid “granularity”)
Create list of points contained in each square
Use 2D array to directly index each square
Insert(x,y): add (x,y) to list for corresponding square
rangeSearch: examine only squares that intersect 2D range query
To compute intersecting squares - Use top right and bottom left points defining the range query
Space: 𝑀^2 + 𝑁
Time: 1 + 𝑁/𝑀^2 per square examined, on average
Grid Square Size impacts Performance
Small size (bigger 𝑀^2) wastes space
Large size means you have many points per square (on average)
Good tradeoff: √𝑁 x √𝑁 grid
For √𝑁 x √𝑁 grid, if points are evenly distributed, then:
Initializing the data structure takes N space
Inserting a point takes 𝑂(1) time
Range Search also takes 𝑂(1) time because 1 point per square
Space-Partitioning Trees
Rather than dividing the space evenly into squares, you can divide in several other ways:
Into two half spaces (not necessarily even sized)
Into four squares (even sized)
Into two regions

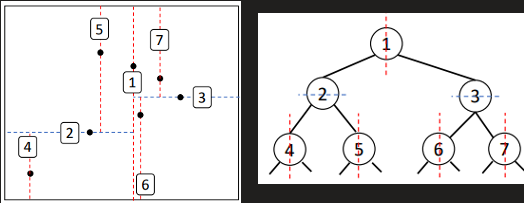
2D Tree Construction
Recursively partition plane into two halfplanes
Even level points partition in two subsets: to their left, and to their right, respectively
Odd level points partition in two subsets: below them, and above them, respectively
2D Tree Construction Analysis
Space: Θ(𝑁)
Worst case Time: 𝑂(𝑁 log 𝑁)
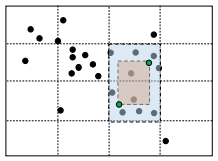
2D Tree Range Search
Find all points in a query axis-aligned rectangle:
Check if root point is in the query rectangle
Check left/bottom recursively (if rectangle extends into that part)
Check right/above recursively (if rectangle extends into that part)
2D Tree Range Search Analysis
Average (Expected) case: 𝑂(𝑅 + log 𝑁) time
Worst case: 𝑂(𝑅 + 𝑁) time
2D Tree Nearest Neighbour
Find closest point to query point
Check distance from point 1 to query point
If left/bottom could contain a closer point, recurse left
If right/top could contain a closer point, recurse right
Output current closest point to query point
2D Tree Nearest Neighbour Analysis
Average (Expected) case: 𝑂(log 𝑁) time
Worst case: 𝑂(𝑁) time
KD Trees
Extension of 2D trees to more dimensions is widely used
Good for high-dimensional and clustered data
Can be used for N-body simulation (physics)
3D tree example:
𝑥-dim
𝑦-dim
𝑧-dim
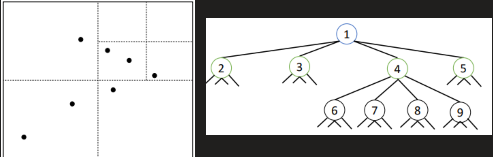
Quadtree Construction
Recursively partition plane into four squares
Each square holds up to some 𝑘 = 2 points,
Any square that has more points is split up into four sub squares
Tree structure follows the partition structure
In quadtrees, regular partition that adapts to point density
Can be used on images, and pixels take the “role of points”
Compression of images
Check connected components in image (image processing)
Replacing BSTs with Skip Lists
Probabilistic data structures
Another way to implement Dictionary ADT with fast insertion, deletion and lookup
Main idea: Multiple layers of linked lists over 16 elements
Contains log1/p (𝑛) lists:
Layer 1: Bottom layer & a simple linked list (here, over 16 elements)
Layer 2: Each element of layer 1 is in layer 2 with probability 𝑝 (here, 𝑝 = 1/4 )
Layer 3: Each element of layer 2 is in layer 3 with probability 𝑝

Replacing BSTs with Skip Lists Advantages
Simple to implement and efficient on average
Average case complexity: 𝑂(log 𝑛 )
Worst-case complexity: 𝑂(𝑛)
Space complexity: 𝑂(𝑛 log 𝑛)
In practice, skips lists are used:
MemSQL
Discord
RocksDB
…
Good for concurrency, and in that context, has been a research focus
Concurrent? For example, when multiple threads access same data structure