Week 11b: Motor Control Theory- Overview and History
1/27
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
28 Terms
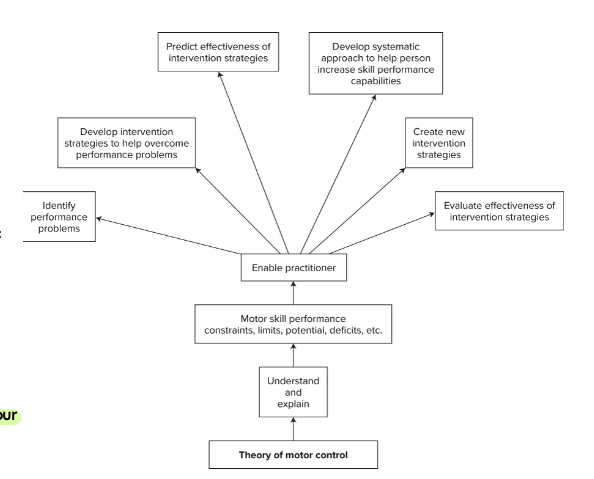
motor control theory
describes and explains how the nervous system coordinates movement to successfully perform a variety of motor skills in a variety of environments- is a framework for interpreting behavior, and helps generate new hypothesis for how movement occurs- guides clinical practice and working hypothesis to understand our examination and treatment
coordination
the patterning of the head, body, and limb movements relative to the patterning of environmental objects and events- two important considerations refers to the relationship among the head, body, and/or limbs at a specific point in time during the s skill performance, relation to the context in which the skill is performed
degrees of freedom problem
number of independent components in a control system and the number of way each component can vary, How to design a complex system that must produce a specific result?
the actual number of DoF to control depends on which level of control we are considering (motor unit vs joint)
open loop and closed loop control systems
different ways in which central and peripheral NS initiate and control action, both involved the movement control center (executive) which generate and sends instruction to effectors
open-loop control system
uses feedback, the control center gives enough information for the effectors to initiate movement and needs feedback to continue and end movement, this enables learning
closed loop control system
no feedback, complete instructions to the effectors to perform the planned movement
evolution of motor control theories
early 1900s: reflex and hierarchal theories
1960-1970s: motor programming theories
1960-present: ecological theory
1970-1980s: systems and dynamic systems theories
reflex theory
from 1906, prevailed for the next 50 years- suggested reflex as the building blocks of all movement- stimulus causes the response as sensory input dictates motor output. As CNS developed/matured, the reflexes are inhibited and/or integrated into more functional postural and voluntary motor responses
weakness of the reflex theory
doesn’t explain well spontaneous movement and movement without sensory stimulus, very fast movements that occur quicker than the summation of a group of reflexes, and varying responses to the same stimulus being possible
clinical implication of the reflex theory
reducing spasticity can enhance normal movement patterns by decreasing the abnormal reflexive response
hierarchical theory
was developed to explain the shortcomings of the reflex theory, suggests top-down control in which higher centers control adn inhibit lower centers (cortex > midbrain > brainstem > spinal cord), and that the brain shows neuromaturation in which it inhibits unnecessary reflexes, allowing for the desired ones, and if higher levels are damaged then lower level reflexes will only be restored once higher center control center is
gaps in the hierarchical theory
control of the brain is not purely top-down, all CNS levels can influence other levels depending on the task
clinical relevance of the hierarchical theory
led to the Brunnstrom adn Bobath methods (early physical therapists), and disorders of higher centers leads to re-emergence of abnormal reflex patterns (spasticity, etc)
information learned from early movement theories (reflex and hierarchical)
use to predict function: during the examination we text reflexes to predict whether the system is intact or not
use to interpret movement behaviors: movement behaviors can be interpreted in terms of the presence or absence of controlled reflexes, synergistic patterns
use to help explain abnormal motor behaviors in people with CNS damage: motor dysfunctions after neurological injury are due to interruptions in the higher center’s ability to control lower centers
early motor control theories impact on clinical practice
clinical approaches relied on examination of reflexive behavior, treatments based on inhibition or facilitation of abnormal postural reflex activity, optimal sensory input needed for stimulating normal motor output
motor programming theories
shift in belief that the CNS is not just a stimulus-response, reactive system, is a memory based construct that controls coordinated movement
Schmidt’s Schema theory
solves the DoF problem through an executive control operation that organizes motor programs and schema (a rule or set of rules that serves to provide the basis for a decision)
control components for learning and control of skills
generalized motor program and motor response schema
generalized motor program
control mechanism responsible for controlling movement coordination patterns of classes of actions
motor response schema
specific rules governing performance of a skill in a given situation (parameters for the GMP)
schmidt’s generalize motor program
the memory representation of a class of action that share common invariant characteristics
invariant features
these features are the signature of a GMP and form the basis of what is stored in memory, characteristics that do not vary across performances of a sill within class of actions
parameters
movement related features of the performances of an action that can be varied between performances
motor program theory
variability in motor control considered consequence of errors in motor performance, error considered bad (performance improves when error and variability decreased), allows for movements to occur without reliance on sensory feedback (central pattern generators- examples is rhythmic pattern generator)
strengths of motor programming theories
there is an emphasis on practice, feedback, and memory
limitations of motor programing theories
storage capacity problem, fails to account for benefits to varying practice conditions enhancing motor learning, doesn’t account for variables within the environment or neuromusculoskeletal system
systems theory
perspective shift from the motor programming theories, whole-body approach and distributed motor control, holistic movement understanding,