Unit 2 Calculus 2
1/52
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
53 Terms

Improper integrals defined by limits
Convergent - The limit exists. The function goes to zero fast enough for the area under the curve to be finite.
Divergent - The limit does not exist (unbounded behavior: ±∞ or n/0). The function either goes to zero too slowly or not at all, so the area under the curve is infinite.

Decompose by splitting the interval
If both converge, then the original converges.
If one or both diverge, then the original diverges.


The exponents p for which the improper integral converges or diverges
p > 1: convergent
p ≤ 1: divergent

Comparison test for improper integrals
Conditions: f(x) ≥ g(x) ≥ 0 for x ≥ a
f(x) - a chosen function (often 1/xp) with known or easily-determinable convergence
Tip: f(x) should be similar to g(x) and include g(x)’s highest power
g(x) - the given function with unknown convergence
If f(x) converges or diverges, then g(x) does the same.

Limit comparison test for improper integrals
Conditions: f(x), g(x) > 0 for x ≥ a
If limit > 0, then f(x) and g(x) either both converge or both diverge.

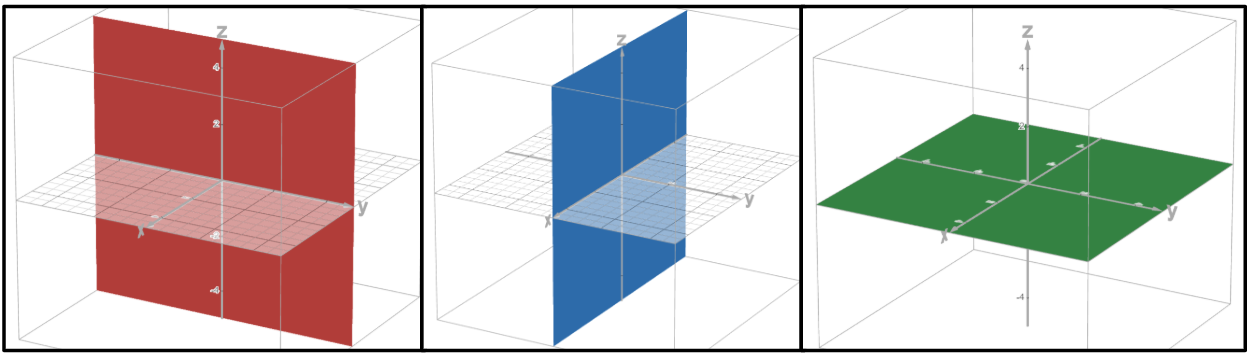
x = k, y = k, and z = k traces
Vertical plane: x = k, y = k
Horizontal plane: z = k
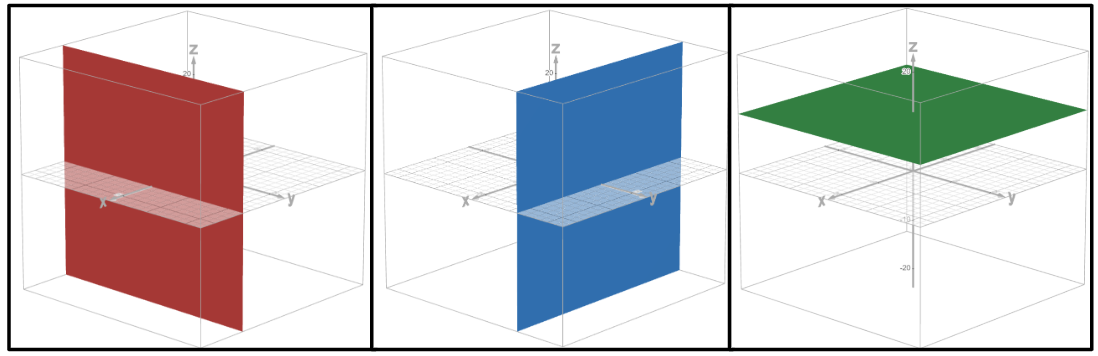
What does it mean when an x, y, or z is missing from an equation?
That variable has no value restrictions, so the graphed function extends across that entire axis.
Distance between the points
P1(x1,y1,(z1)) and P2(x2,y2,(z2))
Length/magnitude of a 2-D (3-D) vector
a = <a1,a2,(a3)>

Equation of a sphere
(x – h)2 + (y – k)2 + (z – l)2 = r2
center point (h,k,l)
radius r
Add constants to create trinomials that factor into square binomials:
x2 + 2ax + a2 = (x + a)2
x2 – 2ax + a2 = (x – a)2
a2 = (2a/2)2
Components of a 2-D (3-D) vector between the points (x1,y1,(z1)) (the tail) and (x2,y2,(z2)) (the arrow head)
<x2 – x1, y2 – y1, (z2 – z1)>
* tells magnitude and direction, NOT position
Addition/subtraction of two 2-D (3-D) vectors:
a + b = <a1,a2,(a3)> + <b1,b2,(b3)>
a – b = <a1,a2,(a3)> – <b1,b2,(b3)>
<a1 + b1, a2 + b2, (a3 + b3)>
<a1 – b1, a2 – b2, (a3 – b3)>
Multiplication of a scalar c to a 2-D (3-D) vector a:
ca = c<a1,a2,(a3)>
<ca1,ca2,(ca3)>
* Vector ca has a different length than a and (if c is negative) points in the opposite direction.
Vectors a and b are parallel (a||b) if…
b = ca for some scalar c
OR
a x b = 0
Standard basis vectors in two (three) dimensions
i = <1,0,(0)>
j = <0,1,(0)>
(k = <0,0,1>)
2-D (3-D) vector a = <a1,a2,(a3)> in terms of i, j, and k
<a1 + 0, a2 + 0, (a3 + 0)>
<a1,0,0> + <0,a2,0> + (<0,0,a3>)
a1<1,0,0> + a2<0,1,0> + (a3<0,0,1>)
a1i + a2j + (a3k)
Unit vector â in the direction of a
* 1/|a| is a scalar that makes the length 1

Dot product of two 2-D (3-D) vectors:
a • b = <a1,a2,(a3)> • <b1,b2,(b3)>
a1b1 + a2b2 + (a3b3)
* a number
a • a
<a1,a2,(a3)> • <a1,a2,(a3)>
a1a1 + a2a2 + (a3a3)
a12 + a22 + (a32)
|a|2
a • b
|a||b|cosθ ← angle between a and b
Vectors a and b are orthogonal/perpendicular (a⊥b) if…
a • b = |a||b|cos(π/2) ← θ = π/2 (90o)
a • b = |a||b|(0)
a • b = 0
Component of b along a (compab)
aka scalar projection of b onto a
* a number
Vector projection of b onto a (projab)
projab = (compab)â
* a•b/|a|2 is a scalar
* a vector


Determinant of a 2×2 matrix
ad – bc

What happens if the rows are flipped?
bc – ad = –(ad – bc)
Cross product of two 3-D vectors:
a x b = <a1,a2,a3> x <b1,b2,b3>
a vector

Cross product properties
a x a = <0,0,0>
b x a = –(a x b)
because the rows are flipped in the 2×2 matrices
(a x b)⊥a,b
Proof of orthogonality: (a x b) • a (or b) = 0
|a x b|
|a||b|sinθ ← angle between a and b
Areas determined by vectors a and b
Parallelogram: A = |a x b|
Triangle: A = ½ |a x b|
*a and b can be any two adjacent sides
Equations for a line with a known 2-D (3-D) point, (x0,y0,(z0)), and a 2-D (3-D) parallel direction vector, v = <a,b,(c)>
Vector: <x,y,(z)> = <x0,y0,(z0)> + t<a,b,(c)> OR <ta,tb,tc>
t is a scalar called the parameter
Parametric:
x = x0 + at
y = y0 + bt
(z = z0 + ct)
* Another point on the line is needed to find v.

Plane intersection points
yz-plane: x = 0
xz-plane: y = 0
xy-plane: z = 0
Equations for a plane with a known 2-D (3-D) point, (x0,y0,(z0)), and a 2-D (3-D) orthogonal normal vector, n = <a,b,(c)>
Vector: <a,b,(c)> • (<x,y,(z)> − <x0,y0,(z0)>) = 0
<a,b,(c)> • <x − x0, y − y0, (z − z0)> = 0
Scalar: a(x − x0) + b(y − y0) + (c(z − z0)) = 0
ax − ax0 + by − by0 + (cz − cz0) = 0
Linear: ax + by + cz = ax0 + by0 + cz0
Relationship between the normal vector (n) and two parallel vectors (a and b) of a plane (S)
If n⊥S and a,b||S, then n⊥a,b:
n = a x b
* a and b can be found from 1.) the direction vector of a line on the plane or 2.) between points on the plane
Axes intersections
x-intercept: y,z = 0
y-intercept: x,z = 0
z-intercept: x,y = 0
Angle of intersection between planes S and T
It is the same as the angle θ between their normal vectors:
nS • nT = |nS||nT|cosθ
OR
|nS x nT| = |nS||nT|sinθ
Relationship between the normal vectors (nS and nT) of two planes (S and T) and the direction vector (v) of their intersection line
If v||S,T, nS⊥S, and nT⊥T, then v⊥nS,nT:
v = nS x nT
* A point on both S and T is needed to find the intersection line equation. One way is to let one variable be zero and then find the others using a system of S and T’s linear equations.
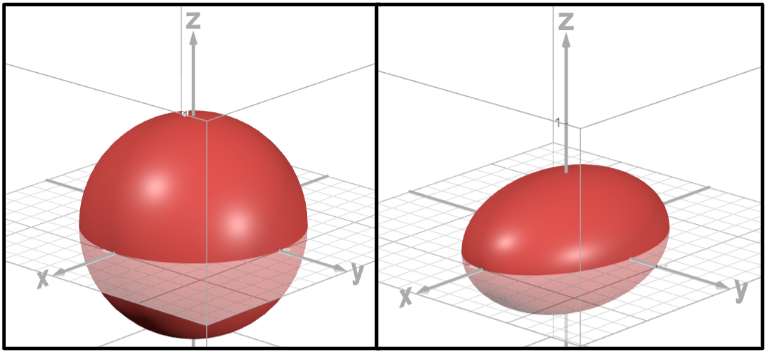
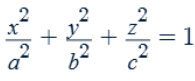
Ellipsoid
All traces are ellipses.
spherical if a = b = c
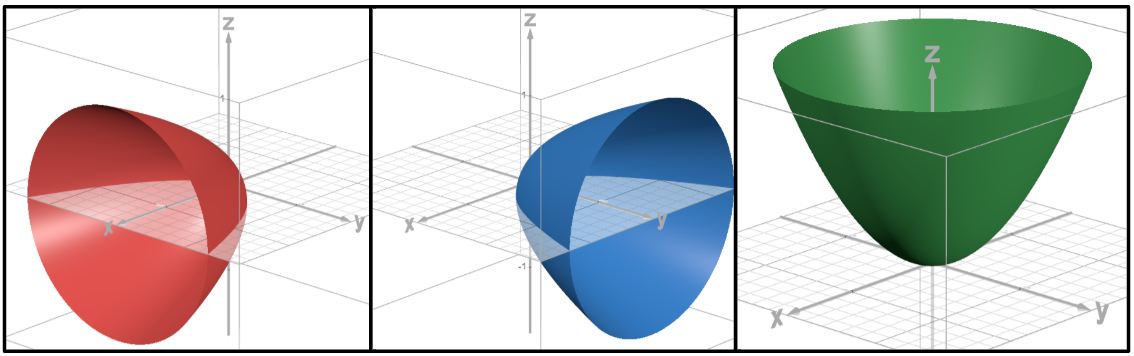
Elliptic paraboloid
The variable with a power of 1 is the axis of symmetry.
Traces along the axis of symmetry are ellipses. Traces along the other two axes are parabolas.

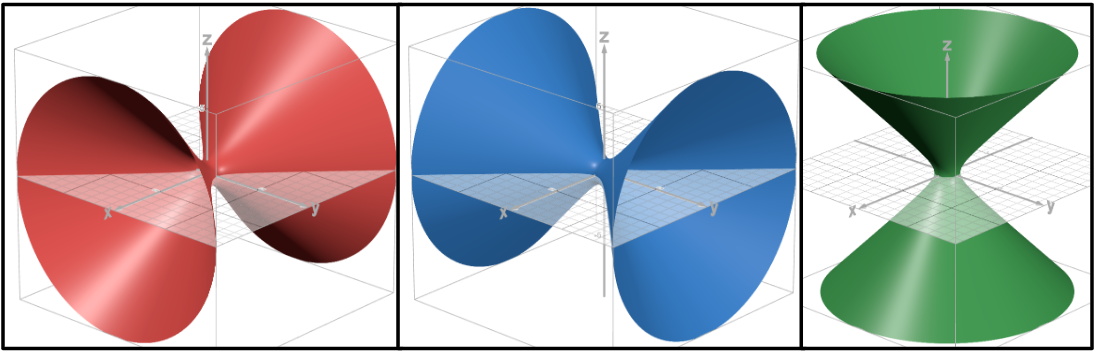
Hyperboloid of one sheet
The variable with a negative coefficient is the axis of symmetry.
Traces along the axis of symmetry are ellipses. Traces along the other two axes are hyperbolas.

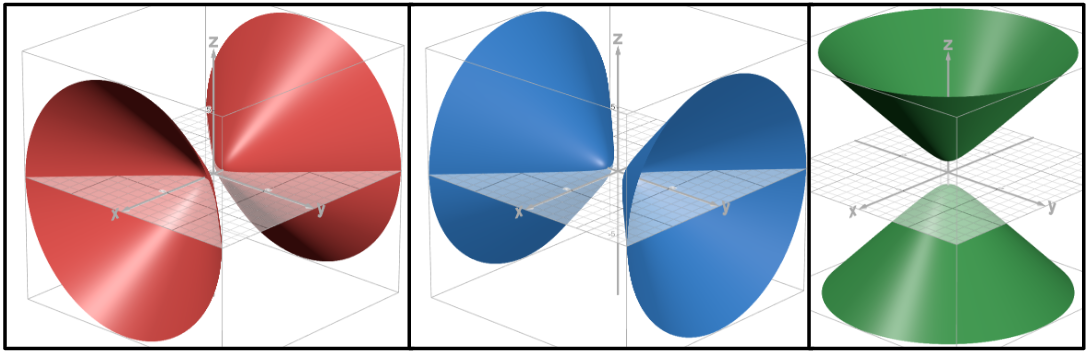
Hyperboloid of two sheets
The variable with a positive coefficient is the axis of symmetry.
Traces along the axis of symmetry are ellipses. Traces along the other two axes are hyperbolas.

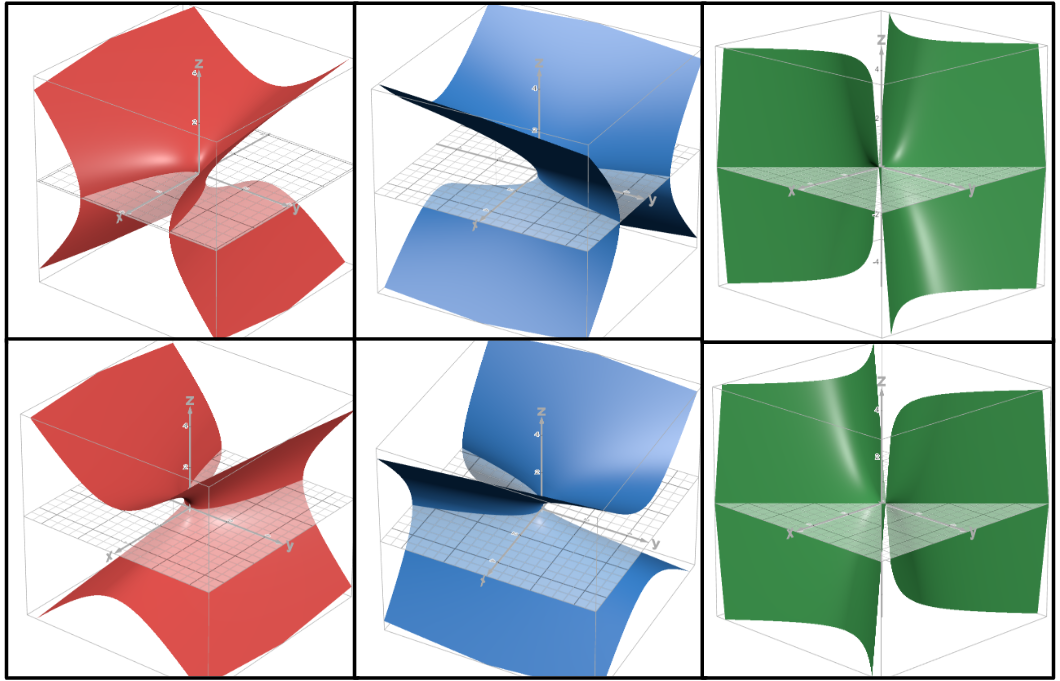
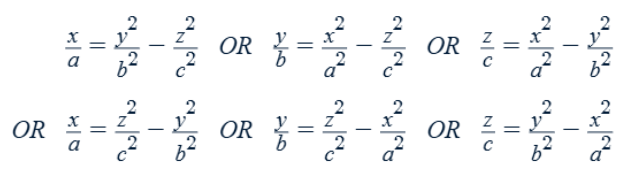
Hyperbolic paraboloid
The variable with a power of 1 is the axis along which the traces are hyperbolas. Traces along the other two axes are parabolas, opening down/back for the variable with a positive coefficient and opening up/forward for the variable with a negative coefficient.
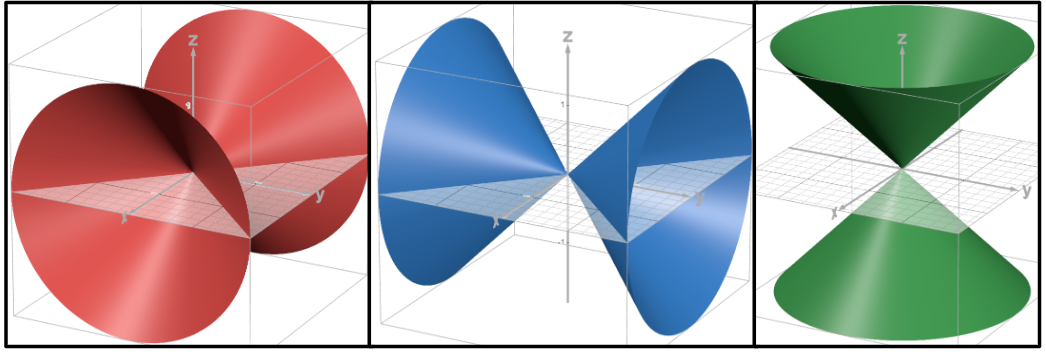
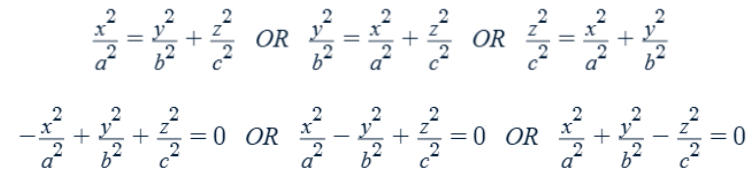
Cone
The isolated variable is the axis of symmetry.
The traces are the same as a hyperboloid of one sheet because the only difference in the equation is that the constant is zero instead of one.
Formulas of common 2-D shapes on a ab-plane
Circle/ellipse: a2 + b2 = k > 0
Cylinder in 3-D
For a circle, √k = radius, and the coefficients are equal.
Parabola:
a = +b2 + k (opens toward increasing a)
a = –b2 + k (opens toward decreasing a)
Hyperbola: a2 – b2 = k
Definition of a vector-valued function
A function (r(t)) for which the domain (t) is a set of real numbers, and the range is a set of 2-D (3-D) vectors
r(t) = <f(t),g(t),(h(t))> = f(t)i + g(t)j + (h(t)k)
* called component functions
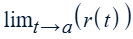
Limit of a 2-D (3-D) vector-valued function, r(t) = <f(t),g(t),(h(t))>

Proof a 2-D (3-D) vector-valued function,
r(t) = <f(t),g(t),(h(t))>, is continuous at t = a
i.e. direct substitution works

Parametric equations for a plane (space) curve with the 2-D (3-D) vector-valued function
r(t) = <f(t),g(t),(h(t))>
x = f(t)
y = g(t)
(z = h(t))
Derivative of a 2-D (3-D) vector-valued function,
r(t) = <f(t),g(t),(h(t))>
r’(t) = <f’(t),g’(t),(h’(t))>
OR
dr/dt = <dx/dt, dy/dt, dz/dt>
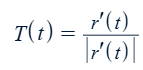
Unit vector T(t) in the direction of the tangent vector r’(t) to the curve
Also: r’(a) is the direction vector of the tangent line at t = a.
* You can find t = a from the tangent point and vice versa using the curve’s parametric equations.
d/dt [u(t) • v(t)]
Product rule: u’(t) • v(t) + u(t) • v’(t)

Integral of a 2-D (3-D) vector-valued function, r(t) = <f(t),g(t),(h(t))>

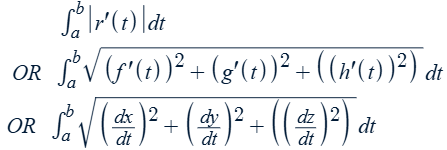
Arc length of a plane (space) curve with the 2-D (3-D) vector-valued function r(t) = <f(t),g(t),(h(t))> for a ≤ t ≤ b
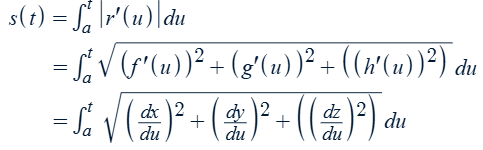
Arc length function (s(t)) of a plane (space) curve with the 2-D (3-D) vector-valued function r(u) = <f(u),g(u),(h(u))> from t = a in the direction of increasing t
Also: s’(t) = |r’(t)| OR ds/dt = |dr/dt|
How to reparametrize a curve with respect to arc length
Find s(t) using the arc length formula.
Solve for t.
Substitute t for its equivalent terms of s.