Shortest Paths in Graphs
1/14
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
15 Terms
Paths
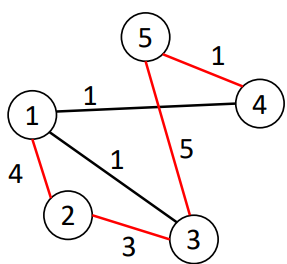
Between nodes 𝑢 and 𝑣:
Sequence of (non-repeating) nodes: 𝑢, 𝑤1, 𝑤2, … , 𝑣
In the example, (1,2,3,5,4) is one between 1 to 4
Shortest Paths
between nodes 𝑢 and 𝑣 = among all paths between u and v, the one that has the smallest total edge weight
Shortest Paths in Unweighted Graphs
Consider an unweighted graph 𝐺
BFS search can compute shortest paths when 𝐺 is an unweighted graph
BFS tree contains shortest paths from ss to any node in G, when G is an (edge) unweighted graph
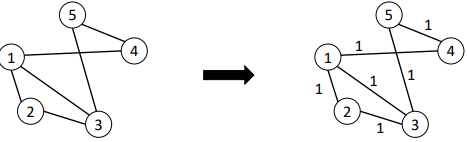
Shortest Paths in Weighted Graphs
The sum of weights on that path should be smaller than the sum of weights on any other path
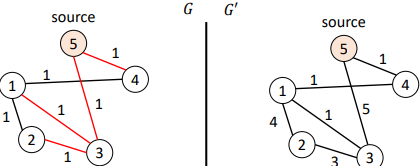
from source (5) to node 3 in G? (5,4,1,3) or 5 -> 4 -> 1 -> 3
when you consider weights (or distances), not hops
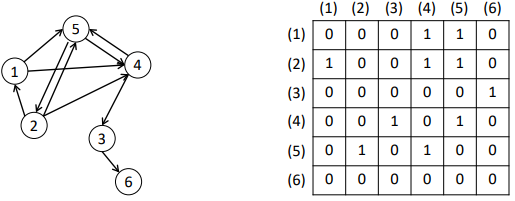
BFS Traversal on Directed Graphs
Consider a directed, unweighted graph 𝐺. Compute BFS tree rooted at 4
BFS tree spans all nodes because all nodes can be reached from 4
When the graph is not strongly-connected, the BFS may not visit all nodes
Why does BFS not work on Weighted Graphs?
it doesn’t take edge weights into account
Computing Shortest Paths in Weighted Graphs
Use Dijkstra’s algorithm to solve the three shortest path problems
Shortest distances (from source)
Shortest paths (from source)
Pathfinding (from source)
Linked to network routing protocols or robot exploration (or search) algorithms
Several extensions:
A* search algorithm
Bellman-Ford algorithm
Floyd-Warshall algorithm
Dijkstra’s Algorithm
Keep two arrays: visited[] and distanceToSource[]
Start at source, and initialize:
Initialize visited status of all nodes (besides source) to unvisited
Initialize distances to source to ∞ for all nodes (except source), and to 0 for the source
While not all nodes have been visited:
Visit (unvisited) node 𝑣 with smallest distanceToSource
For all neighbours of 𝑣, if the path going through 𝑣 is shorter, then update distance
For visited node 𝑣 and neighbour 𝑢:
If distToS[u] > distToS[v] + weight(u,v), then distToS[u] = distToS[v] + weight(u,v)
Return distanceToSource
Some intuition on Dijkstra’s
At the start, and through most of the algorithm, these are “approximate distances”
∞ implies the node is “very far”, or more precisely unreachable,
0 implies the node is the source
The key idea of Dijkstra’s algorithm is to improve these approximations, as you visit more and more nodes, until all distances to the source are accurate
(Invariant) When a node is visited, their distance to the source is accurate
Shortest Path with Dijkstra’s
Keep three arrays: visited[], previousNode[] and distanceToSource[]
Start at source, and initialize:
Initialize visited status of all nodes (besides source) to unvisited
Initialize distances to source to ∞ for all nodes (except source), and to 0 for the source
Initialize previousNode's entries to null
While not all nodes have been visited:
Visit (unvisited) node 𝑣 with smallest distanceToSource
For all neighbours of 𝑣, if the path going through 𝑣 is shorter, then update distance and set previousNode[neighbour] to 𝒗
Return distanceToSource and previousNode
Pathfinding with Dijkstra’s
While not all nodes have been visited:
Visit (unvisited) node 𝑣 with smallest distanceToSource
If current visited node is the target node, return distanceToSource[v] and pathToSource[v], where pathToSource[v] = (previousNode[v], previousNode[previousNode[v]], …)
For all neighbours of 𝑣, if the distance of the path going through 𝑣 is a better approximation, …
Throw an exception: “target node not found”
Dijkstra’s Algorithm Complexity
Worst-case time complexity of 𝑶(𝒏^𝟐):
We visit each node once, and during each visit, we do 𝑂(1) operations per neighbours
This amounts to 𝑂(𝑚) operations where 𝑚 is the number of edges
And to get each new visited node, we find the unvisited node with minimum distance to source, which takes 𝑂(𝑛) operations
In total, this amounts to 𝑂(𝑛^2) operations
We can use better data structures (priority queues based on Fibonacci heaps, or self-balanced binary search trees, or other heaps) to improve Dijkstra’s algorithm to:
𝑶(𝒎 + 𝒏 log 𝒏) worst-case time complexity
Better Shortest Path Algorithms and when to use them
When we have extra information (heuristic) on distances from some nodes to source, we can use the A* algorithm
If we have edges with negative weights (but not negative cycles) then you can use Bellman-Ford
If you are fine with approximating the distances (or getting some “almost” shortest paths), then there are faster algorithms…
A* Search Algorithm
For pathfinding only (from specified source to specified target), not from the source to all other nodes
Core idea: use heuristics (on the distance from current node to specified target) to guide (i.e., be more efficient in) the search
For example, if graph weights represent Manhattan distances (e.g., driving along roads)
Then the heuristics could be straight-line distance (e.g., distance as the bird flies)
If 𝑑(𝑣) is the estimated distance from source to 𝑣 in Dijkstra’s algorithm, and ℎ(𝑣) the heuristic distance from node 𝑣𝑣 to the target, then in A* we compare the values:
𝑑(𝑣) + ℎ(𝑣)
Bellman-Ford
Computes shortest path from specified source to all other nodes (like Dijkstra’s algorithm)
Works for wider class of graphs, as it can work for (some) graphs with negative weights
Still, a major problem if there is a negative cycle (with negative total weight sum)
When there is a negative cycle, Bellman-Ford finds that cycle (but not all shortest paths)
Core idea (like Dijkstra’s algorithm): compute (over)estimations of the distances from the source to all other nodes, which you iteratively improve upon (or relax)
In Dijkstra’s algorithm, you use a priority queue to decide which edge to relax,
In Bellman-Ford, you relax all edges every iteration, for a total of 𝑛 − 1 iterations
Worst-Case Time Complexity: 𝑂(𝑛 ⋅ 𝑚)