Geometry Chapter 9 study Guide
1/41
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
42 Terms
Transformation
a mapping that results in a change in position, shape or size of an image.
Pre-image
the original figure

Image
the resulting figure

Rigid motion
a transformation that preserves distance and angle measures

What are the three types of transformations:
translations, reflections, and rotations
Translation
a transformation that maps all points of a figure the same distance in the same direction
Notation:
The part that explains how the transformation is. Like: “pre-image ∆ABC
image∆A’B’C’
Prime:
the apostrophe ‘ after a letter showing you its an image.

Translation notation:
T(3,-2)(ABC) = A’B’C’
How to calculate translations from coordinates:
B’ - B
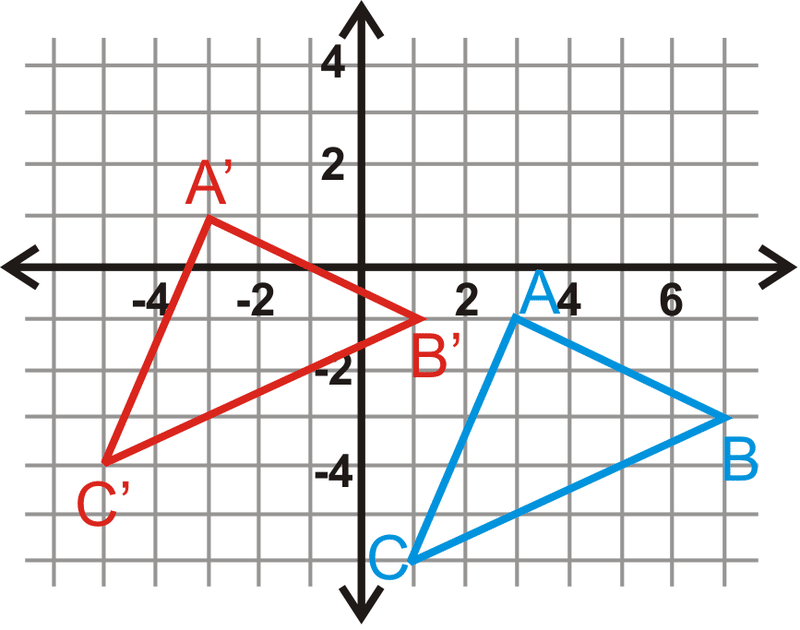
Reflection:
a transformation across a line m, called the line of reflection. It contains the following properties:
If a point A is on line m, then the image of A is itself (that is A = A’)
If a point B in not on line m then m is the perpendicular bisector of BB'
Reflections preserve distance
Reflections preserve angle measures
Reflections map each point of the preimage to one and only one corresponding point of its image
Reflections are rigid motions
Every corresponding point on the image and preimage are equidistant from the line of reflection

Reflection notation example:
Ry=x(ABC) = A’B’C’
Ry=-1 is what type of line:
a horizontal line
Remember:
when flipping over the axis, the prime is the opposite -2 → 2 and 2 → -2. Y axis = x coordinate changes, X axis = Y coordinate changes
X = 0 is:
Y axis
Y = 0 →
x axis
A rotation:
A rotation of x° about a point Q, called the center of rotation is a transformation with these two properties:
The image of Q is itself (Q’ = Q)
For any other point V, QV’ = QV and m∠VQV’ = x°

Angle of rotation:
the number of degrees a figure rotates
Remember:
A rotation about a point is a rigid number. You write the x° rotation of ∆UVW about point Q as r( x°,Q) (∆UVW) = ∆U’V’W’ where x° is rotation and Q is the center of rotation.
Remember:
unless stated otherwise, rotations are counterclockwise.
Rules for rotation 90°:
r(90°,O) (x-y) = (-y,x)
Rules for rotation of 270°:
r(270°,O)(x,y) = (y, -x)
Degrees that have rules that require the switching of x and y:
90° and 270°
Rules for 180° and 360°:

Remember:
A rigid motion can be expressed as a composition of reflections

Isometry:
a transformation that preserves distance or length.
Examples of Isometries:
Translation, rotations and reflections

Theorem 9.1
The composition of two or more isometries is an isometry. There are only 4 kinds of Isometries:
Translations
Reflections
Rotations
Glide Reflection

Theorem 9.2 - Reflections Across Parallel Lines:
A composition of reflections across two parallel lines is a translation.

Remember:
(Rm ° Rl) (↑) is the same as saying Rm(RL(↑) )
Which comes first in “(Rm ° Rl)
Rl
Theorem 9.3 - Reflections Across intersecting Lines:
A composition of reflections across two intersecting lines is a rotation about the point of intersecting lines.

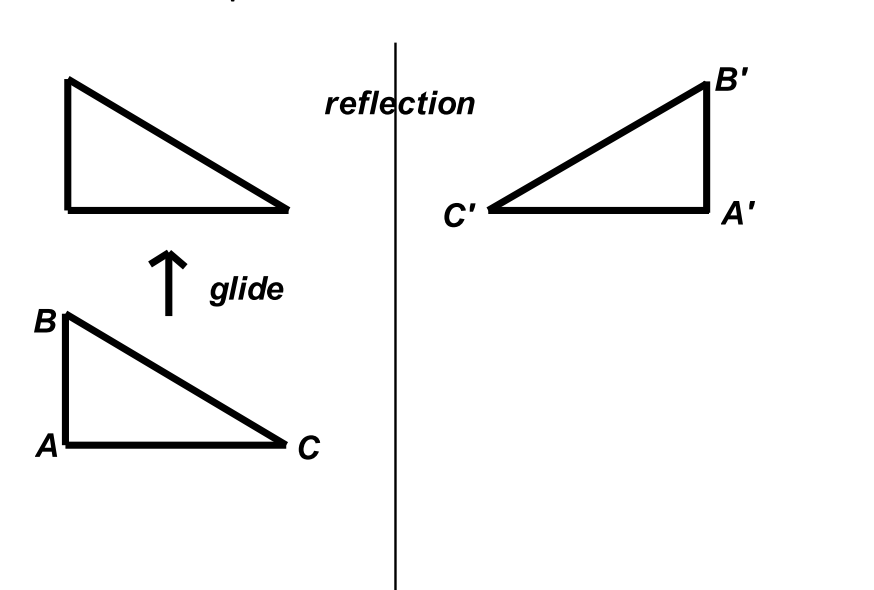
Glide reflection:
a composition of a translation (a glide) and a reflection across a line parallel to the direction of the transition.
Remember:
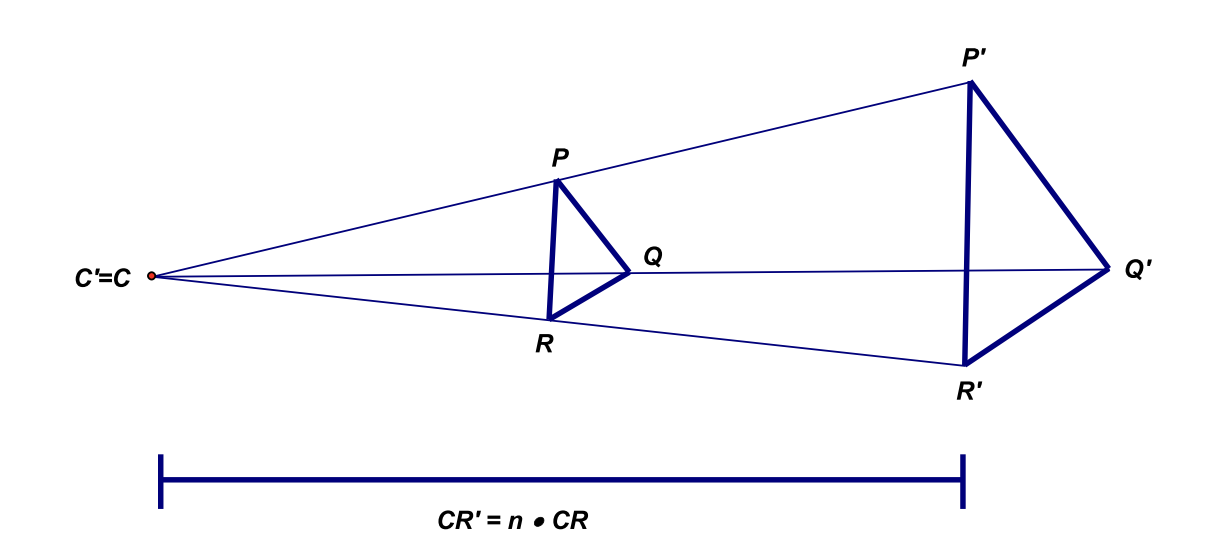
A dilation with center of dilation C and scale factor n,n > 0, can be written as D(n,c)
Dilation:
a transformation with the following properties:
The image of C is itself )that is C’ = C)
For any other point R,R’ is on CR and CR’ + n✖CR or n = CR'CR
Dilations preserve angle measures
What are dilations similar to:
similar figures
Scale factor =
image/preimage
Remember:
we will consider all centers of dilations in the coordinate plane to be the origin.
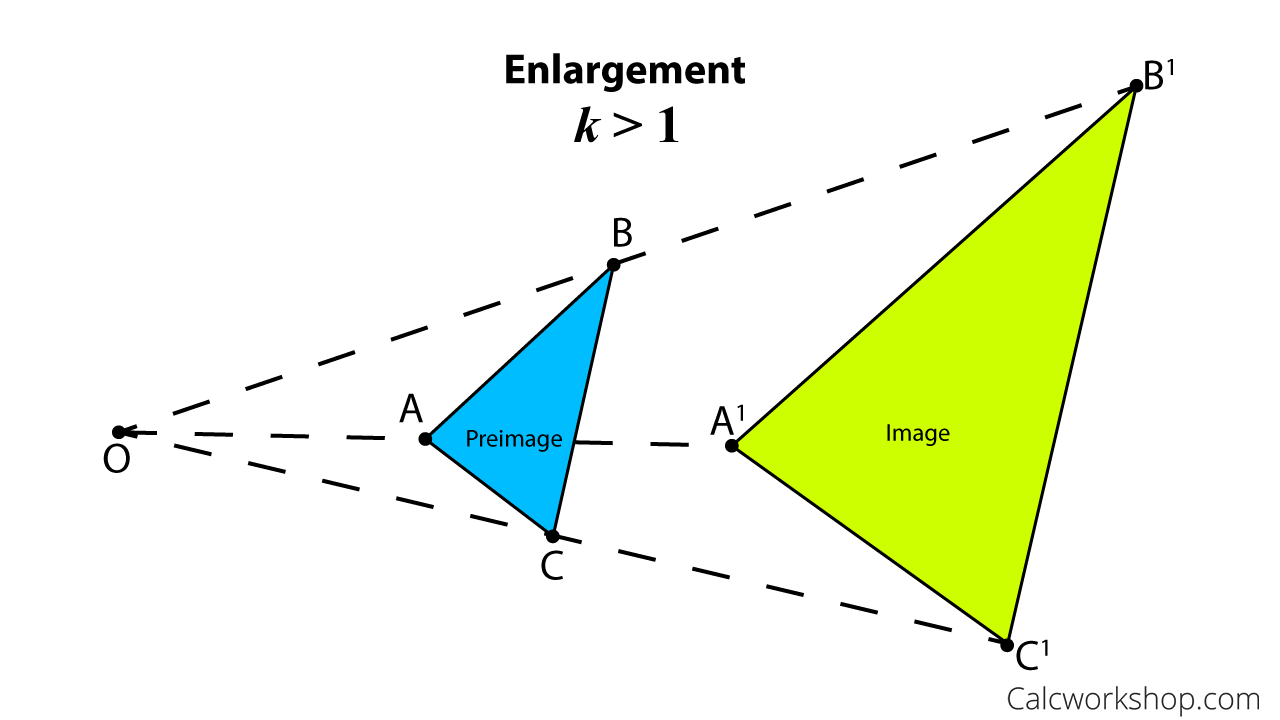
the scale factor is > 1
dilation is an enlargement
If dilation is between 0 and 1
dilatation is a reduction

Remember:
you can find the dilation image of point P(x,y) by multiplying the coordinates of P by the scale factor n
Image =
scale factor ✖ preimage length