Applied Econometrics
1/161
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
162 Terms
Time Series
Sequence of observations taken sequentially in time
Lag Operator
What does the difference operator express
Differences between consecutive observations of a time series
Define a Univariate Time Series Analysis (and what process it is)
Single time series.
Stochastic Process
Purpose of univariate time series (2)
Develop models/methods that best describe an observed time series
forecasting
Define
Multivariate Time Series Analysis
A time series is stationary if (3)

Autocorrelation coefficient

How does ps behave in a stationary process
Time constant
Decreases quickly to 0, as the lag length increases
Shocks to a stationary process are (2)
temporary
short memory
What is Non-stationary Process
non mean reverting
Exhibits trends
Why is non-stationary not efficient (4)
empirical results from one period cannot be generalised to other periods
Forecasting is meaningless
The series cannot be easily modelled
Spurious regression
What is a WN process
Sequence of uncorrelated random variables with a constant mean and constant variance . It has no memory.

White Noise Properties
If time series is WN, the sample autocorrelations will
Approx equal to zero
Purpose of ARCH family of models
Models that are capable of dealing with the volatility of series
ARCH model suggests…
Variance of the residuals at time t, depends on the squared error terms from past periods
So it is better to model the mean and variance
Format of ARCH Model
Property of ARCH
Variance depends on one lagged period of the squared error terms
Steps to Identify ARCH model
Estimate by OLS and obtain residuals
Regress the squared residuals to a constant and lagged squared residuals
Compute the LM = (n-p)R² statistic and compared with critical values
Conclude
What is the GARCH model
Includes the lagged conditions variance terms as autoregressive terms
Format if GARCH model
Identify GARCH model
Maximum likelihood estimator
What is a TGARCH model
Adds dummy into variance equation to test whether is a statistically significant difference when shocks are negative
Format of TGARCH
Format a Autoregressive Model

Statistical Properties of AR model
Autocorrelations of AR models..
Decay quickly as lag length increases
Check for Stationarity in AR model
Replace L by z in AR lag polynomial and set equal to zero (characteristic equation)
If roots of z are greater than than 1 in absolute value = stationary
AR to MA

Impulse Response of AR
Format the Moving Average Model

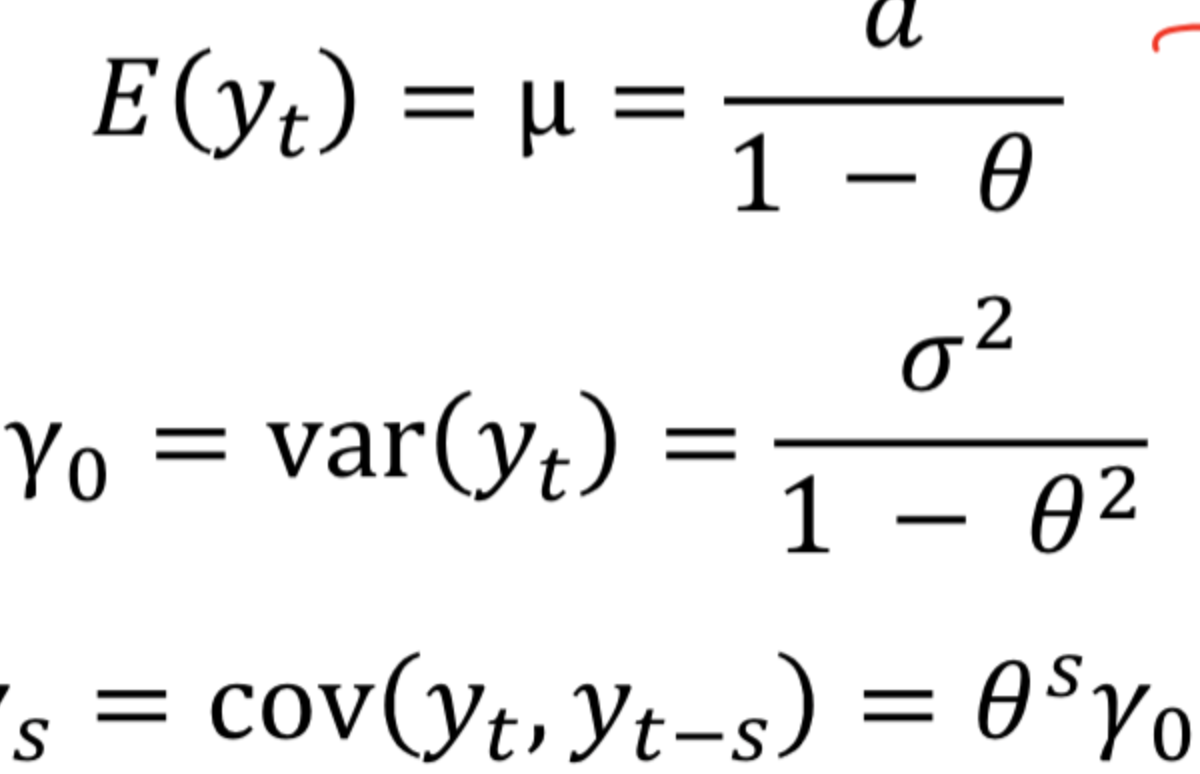
Statistical Properties of MA model
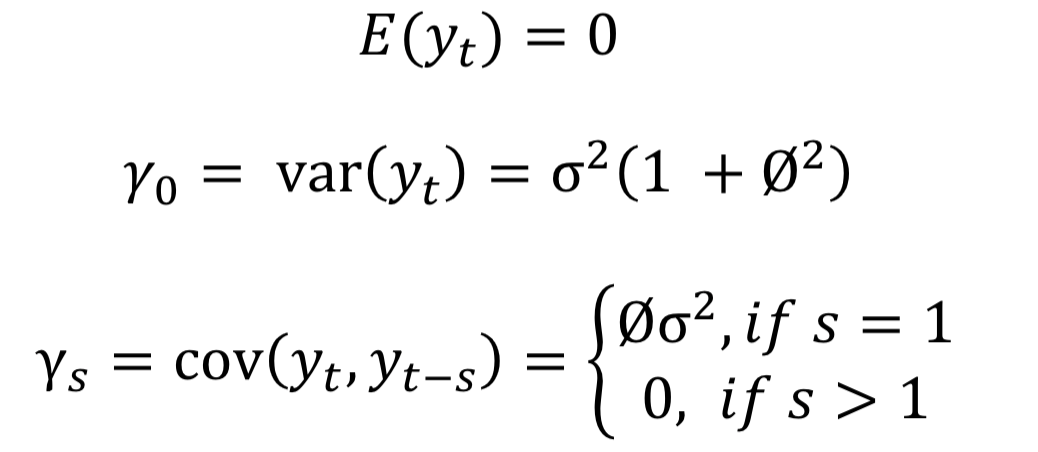
Autocorrelations of MA models…
Decay quickly towards zero as lag length increases
Steps to check invertibility (MA)
Set z = L in the MA lag polynomial, and set equal to zero (characteristic equation )
If all roots greater than 1 = it is invertinle
MA to AR
Solve model with respect to et
Rearrange for Yt in LHS
Format the Autoregressive Moving Average Model

Check for stationarity ARMA
Replace L by z in the AR lag polynomial of order p, ant set equyal to zero (characteristic equation)
If all roots greter than 1, it is stationary
ARMA to MA

Check for invertibility ARMA
Replace L by z in the MA lag polynomial and set equal to zero (characteristic equation)
If all roots are greater than 1 = invertible
What does the Box-Jenkins approach infer
Which stationary models has generated the stationary series
Box-Jenkins Steps
determine the order (p,q) using the information criteria
estimate parameters
Diagnostic testing ( resdiuals should behave like white noise)
Order Identification Options
Choose the maximum pmx and qmax
Then estimate the Maximum likelihood for all combinations
Estimate using the AIC OR BIC
Problem of Adding Lags
Over parameterised models.
Can be rectified using a penalty term
What is a non-stationary series
A series containing a trend (dertministic or stochastic)
What is a trend stationary model
Trend stationary series with a determinist trend
Format a tren staionary AR model

Properties of trend stationary AR
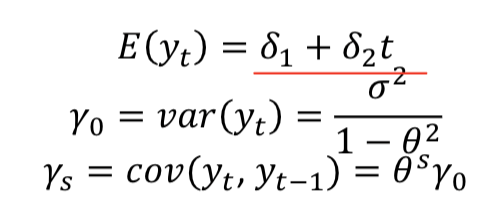
mean varies with time
Define de-trending
Process of removing a trend in a series
Steps to detrending
Estimate the OLS and obtain the residuals
Detrend the residuals
Apply the box-jenkins to the de-trended series
Define Stochastic Trend
Trend that evolves randomly over time (no steady trend direction)
Stochastic trend alternative names:
Difference stationary series
Intergrated series
Unit root series
A stochastic trend series that contains 𝑑 ≥ 0 unit roots is..
Intergrated of order d
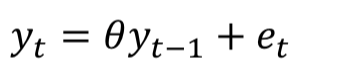
Format the Random Walk model
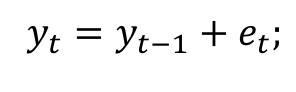
What is the RW model
Stochastic trend model with one unit root
Integrates of order one
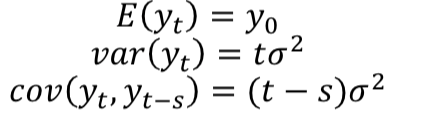
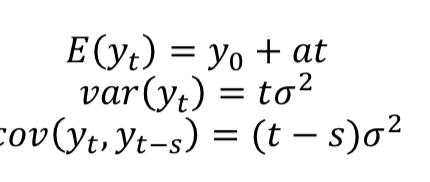
Random walk statistical properties
IRF of RW
How to remove unit root
Differencing
Steps to differencing
b
What is an ARIMA model

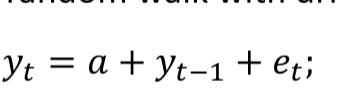
What is a random walk with drift model
Random walk model with an intercept
Format the RW model with drift
RW Model with drift Properties
DF test (clear trend direction)
inspect series
Set up

Test H0: unit root vs H1:
Rewrite the model in differenced form
Estimate using OLS
DF test
compared t to DF critical value
DF Test (no trend)
Inspect
set up

Difference the model
Estimate using OLS
DF test H0: unit root. H1: staionary
compared t to DF critical value
DF test (zero sample average)
Inspect
set up
Difference the model
Estimate using OLS
DF test H0: unit root. H1: stationary
compared t to DF critical value
DF test is valid if
et is a white noise process
Solutions to limitiation of DF
Augmented DF test; by adding lags of difference yt
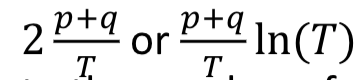
ADF: Lag-length selection
Information criterion (AIC/BIC)
estimate adf with lag lengths to max, including the difference yt
Select with lowest AIC/BIC
General to specific
Estimate the model with pmax lags
check is resiuals are WN
Test the last lag coefficient for significance
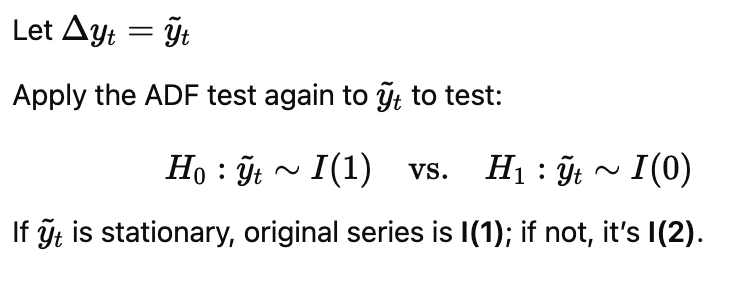
ADF fails to reject the null then..
Test for second unit root
Limitations of ADF ( and alternatives)
ADF has low power (fail to detect stationarity)
Alternatives:
DF-GLS (detrended ADF)
Philipps-peron
KPSS
What does a spurius regression result in
OLS estimates are far away from zero.
They are statistically significant.
𝑅sqaured is also relatively large
Finds a statistically significant relationship between uncorrelated variables due to unit roots
Correct spurious regressions by
Differencing and

When is a series cointergrated

Test for Conintergration
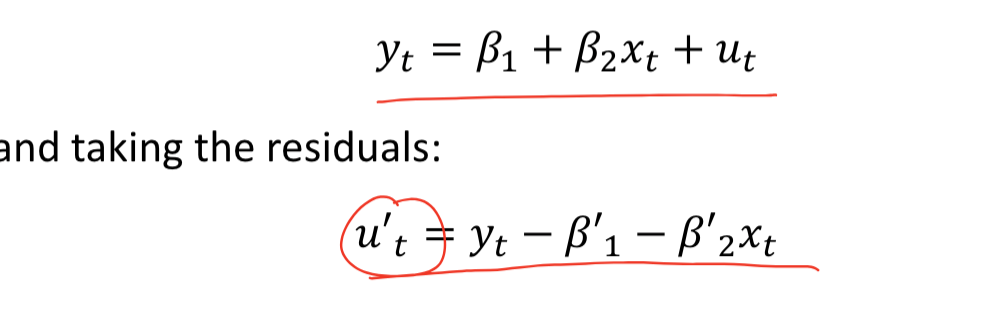
Engle granger test
Make sure both xt and yt are I(1) then run the model with OLS

apply DF (or ADF, or DF-GLSS etc) to obtained residuals
Why differencing successively to achieve stationarity is not ideal
We also difference the error process
No unique long run solution
Find long run equilibrium of xt and yt (Co-intergration)
if ut ~ i(0) then the variables are cointergrated
The Error Correction Model
Combines short and ong run information

b1 - immediate effect of xt
pie - how much past period is corrected in t
Advantages of the ECM and Cointergration
ECM measures how past imbalances are corrected over time
by using first differences, ECM avoids spurious regressions
ECM is easy to intergrate into general-to specific modellling
error term is stationary, meaning there's an automatic mechanism that prevents long-run errors from growing indefinitely
Testing for Cointergration
Engle Granger Approach
test the variables for order of integration
estimate the long-run relationship and obtain the residuals
check for cointegration the order of integration of the residuals
estimate ECM
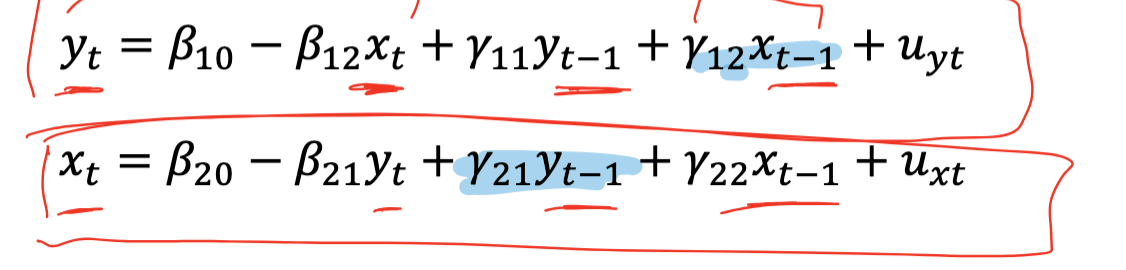
Vector Autoregression
time series 𝑦 that is affected by current and past values of 𝑥௧and, simultaneously, the time series 𝑥 to be a series that is affected bycurrent and past values of the 𝑦 series
Pros of VAR (3)
Simple
Estimation is simple
VAR forecast are better compared to complex models
Cons of VAR (3)
A-theoretic
Loss of df
Obtained coefficients are difficult to intepret
Test for VAR
Granger Causality
A variable 𝑦 is said to Granger-cause 𝑥, if 𝑥 can be predicted with greater accuracy by using past values of the 𝑦 variable rather than not using such past values, all other terms remaining unchanged.
VAR test results (4)
Lagged x statistically significant and y not. so x causes y
Lagged y statistically significant and x not. so y causes x
Both statistically significant = bi-directional causality
both no significant = indepoendent
Granger Causality steps
regress y on lagged y and obtain RSSr
regress y on lagged y and lagged x and obtain RSSu
H0: coefficients of lagged terms of x are equal to zero H1: coefficients of lagged terms X are NOT equal to zero
F- statistic and conlude
Define Probability of Success
Model the probability of choosing one of the alternatives
What is the base group
Alternative category that is not explicitly modelled
Why is OLS not suitable for modelling the probability of success
The dependent variable (response) is discrete but OLS treats as continous
Y is said to have a bernoulli distribution with prob. mass function:

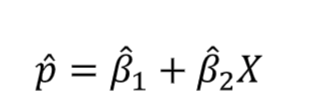
Format the linear probability model

b2 is the change in the probability that is associated with a unit change in x
Limitations of LPM
distribution of disturbance term consists of 2 specific values = binomial distribution = so standard errors are invalid
Population variance of the disturbance tern is given byso

So it is heteroskedastic
for alternative values of x, we can gain probabilities that are greater than 1etc
By OLS, the predicted probabilities are
How do we ensure predicted probabilitues are bounded by 0 and 1
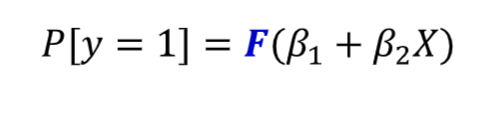
Ensure F is a probability distribution function. Standard normal cumulative distribution function and logistic distribution function
Format the Probit Model

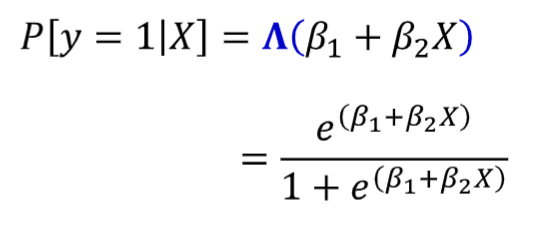
Format the Logit model
How do we obtain b1 and b2 from the logit/probit models?
The MLE chooses the parameter values that maximize the probability (or likelihood) of observing the sample actually obtained
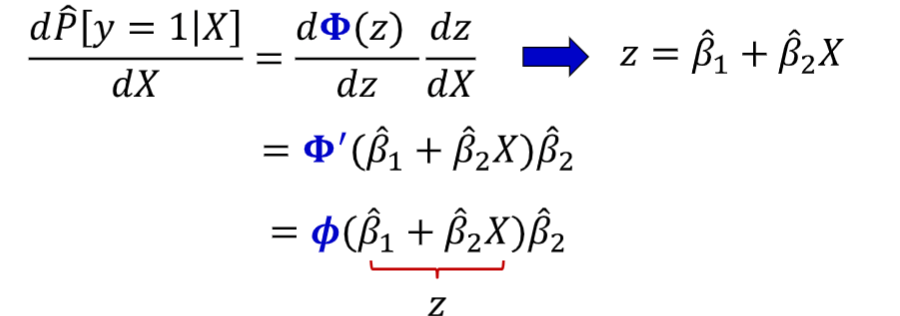
Predicted probability from Probit model
Format the Marginal effect of a one unit change in X (probit)