meccanica - corpi rigidi
1/31
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
32 Terms
dammi la definizione di corpo rigido
Un corpo si dice rigido se la distanza tra qualsiasi sua coppia di punti è fissa. Ciò è dovuto ai legami interatomici che tengono fermi gli atomi.
quanti gradi di libertà ha un corpo rigido?
Fissato un punto A nel corpo rigido, abbiamo 3 coordinate (xyz).
Fissato un secondo punto B esso ha 2 gradi di libertà, perché ha distanza fissa da A.
Fissato un terzo punto C esso ha 1 grado di libertà, perché può solo che ruotare attorno la congiungente A-B.
Quindi in totale un corpo rigido ha 3 + 2 + 1 = 6 gradi di libertà
quali sono i tipi di moto che può compiere un corpo rigido? Dimostra che la velocità angolare è la stessa in tutto il corpo
in generale il moto è una successione di coppie rotazione + traslazione infinitesime. In generale l’asse di rotazione cambia nel tempo, infatti viene detto asse di rotazione ISTANTANEO.
Quindi basta conoscere la velocita e la velocità angolare rispetto un asse del corpo per conoscere il suo moto in un istante.
La velocità dipende dalla posizione della particella del corpo rispetto all’asse di rotazione, ma la velocità angolare no perché descrive l’angolo spazzato in un certo tempo.
DIMOSTRAZIONE
Scelgo due punti all’interno del corpo, P e Q, mentre O è il punto per cui passa l’asse di rotazione, allora:
vP = vo + w x OP
vQ = vo + w x OQ
vP - vQ = w x (OP-OQ = w x QP
quindi vP = vQ + w x QP
per cui la velocità angolare è la stessa anche se ho scelto l’asse che passa per Q.
posizione del centro di massa per un corpo rigido?
dato che ρ = dm/dV e che m = ∫dm = ∫ρdV
rCM = ∫rdm/∫dm = ∫rρdV/ ∫ρdV = 1/m ∫rρdV
se il corpo è OMOGENEO, quindi con ρ costante:
rCM = ρ/m ∫rdV
quali sono le condizioni necessarie affinché avvenga l’equilibrio?
la somma vettoriale di tutte le forze esterne deve essere nulla, così come la somma di tutti i momenti delle forze esterni
quanti gradi di libertà ci sono nelle rotazioni attorno ad un asse fisso?
quando fisso un punto dell’asse perdo tre gradi di libertà, mentre se ne fisso un’altro (andando quindi a determinare l’asse di rotazione) ne perdo altri 2.
Dai sei gradi di libertà iniziali ne tolgo 5, per cui servirà un’unica equazione per determinare il moto di rotazione attorno ad un asse fisso.
rotazioni intorno ad un asse fisso: determina il momento assiale
uso la seconda equazione cardinale dLo/dt = Mo
moltiplicandola per il versore uz ottengo
dLz/dt = dLo uz/dt = Mo uz = Mz
Mi ricavi la seconda equazione cardinale della dinamica per le rotazioni attorno a un asse fisso (z), partendo dal calcolo del momento angolare del singolo elemento di massa dm signorinaaaaaaaaaaaaa
rotazione di un punto P con asse di rotazione z e origine sopra la circonferenza tracciata da P.
So che ogni elemento ruota con velocità v = w x R (w perp. R)
Inoltre il momento angolare di dm è
dL = r x p = r x dm v = r dm v uT = r dm w R uT
uT = versore perpendicolare a r e v
dLz = dL uz = r dm w R uT ° uz ° 1 ° 1*cos(angolo compreso tra le due u)= r dm w R cos(pi/2 - θ) =
r dm w R sinθ = dm w R2
integro:
∫dLz = Lz = ∫ w R2 dm = ∫ w (x2 + y2) ρdV = Iz w
derivando:
dLz/dt = Iz d2θ/dt2 = Iz α = Mz
(non si derviva Iz perché costante rispetto al tempo.)
Nel caso di un corpo rigido in rotazione attorno a un asse fisso, come si muove il centro di massa e da quali forze è determinato il suo moto?
il moto del CM è determinato perché dista RCM dall’asse di rotazione, per cui:
aCM,T = α RCM
aCM,N = w2 RCM = v2CM / RCM
vCM = w RCM
rotazioni intorno ad un asse fisso: ricava l’energia cinetica
K = ∫ ½ dm v2 = ∫ ½ ρ v2 dV = ∫ ½ ρ w2 R2 dV = ½ Iz w2 = ½ Lz2/Iz
rotazioni intorno ad un asse fisso: teorema delle forze vive per calcolare il lavoro e potenza
dW = dK = Iz w dw = Iz dφ/dt dw = Iz dw/dt dφ = Mz dφ
P = dW/dt = Mz w
Qual è la relazione generale tra il momento angolare $\mathbf{L}$ e la velocità angolare $\boldsymbol{\omega}$ per un corpo rigido che ruota attorno a un asse fisso $z$? Quando vale $\mathbf{L} = I_z \boldsymbol{\omega}$?
In generale, per una rotazione attorno a un asse fisso $z$, il vettore momento angolare $\mathbf{L}$ non è parallelo all'asse di rotazione ($\boldsymbol{\omega}$). Esso ammette tre componenti:
L=(Lx,Ly,Lz)
Componente lungo l'asse ($z$): È sempre determinata dal momento d'inerzia rispetto a quell'asse:
Lz=Izω
Componenti trasversali ($x, y$): Sono determinate dai prodotti d'inerzia ($I_{xz}, I_{yz}$), che misurano l'asimmetria della massa rispetto all'asse:
Lx=−Ixzω,Ly=−Iyzω
momento d’inerzia rispetto un asse di rotazione fisso
I = ∫ R2 dm
dove R = distanza punto infinitesimo di massa dm-asse.
= ∫V ρ R2 dV
= ∫V ρ (x2+y2) dV
momento d’inerzia rispetto all’asse di simmetria di un asta di lunghezza L
I = ∫-L/2L/2 x2 dm = ∫ ρ x2 dx = ρ (L3/24 + L3/24) = m L2 / 12
momento d’inerzia rispetto all’asse di simmetria di un anello sottile di raggio R
I = ∫02pi R2 dm = ∫ ρ R2 dl = ρ R2 ∫ dl = ρ R2 2 pi R
circonferenza cerchio
ρ * circonferenza = massa, per cui
I = m R2
oppure
m = ρ * 2 pi R
I = ∫02pi R2 dm = ∫ R2 R dθ ρ = 2 pi R3 ρ = m R2
momento d’inerzia rispetto all’asse di simmetria di un disco di raggio R
so che ρ = m / pi R2
I = ∫0R dr ∫02pi dθ r r2 ρ = 2 pi R4/4 ρ = ½ m R2
momento d’inerzia rispetto ad un asse di simmetria di un cilindro di raggio R e altezza L
ρ = m / pi R2 L
I = ∫0R dr ∫02pi dθ r ∫0L dz r2 s =
= R4/4 2 pi L ρ = ½ m R2
momento d’inerzia rispetto ad un asse di simmetria di una sfera di raggio R
ρ = m / 4/3 pi R3
sin2θ = 1 - cos2θ
sinθdθ = -d cosθ
I = ∫0R dr ∫0pi dθ r sinθ ∫02pi dφ (rsinθ)2 ρ =
= 2 pi R5/5 ∫-11 d cosθ (1 - cos2θ) ρ =
= 2 pi R5/5 (2-2/3) = 2 pi R5/5 4/3 m/(4/3 pi R3) = 2/5 R2 m
enuncia e dimostra il teorema di Huygens - Steiner
il momento d’inerzia di un corpo rigido rispetto ad un asse che di trova a distanza D dal CM è dato dalla somma del momento di inerzia rispetto ad un asse parallela ma passante per il CM I0 e del prodotto mD2
I = I0 + mD2
DIMOSTRAZIONE
nuove coordinate di P:
z’ = z
x’ = x
y’ = y + D
I = ∫V (x2+y2) dm =
passo alle coordinate del nuovo asse di rotazione
∫ [x’2 + (y’ - D)2] dm =
svolgo il quadrato di binomio
∫ [x’2 + y’2 - 2Dy’ + D2] dm =
= ∫ (x’2 + y’2) dm + D2 ∫ dm - 2D ∫ y’ dm
momento d’inerzia rispetto l’asse z’
mD2
nullo, perché =my’CM con y’CM la coordinata del CM è posta = 0
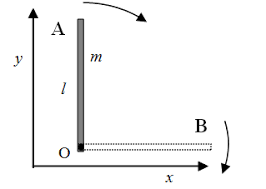
applicazione di huygens-steiner: calcola il momento d’inerzia di un’asta con punto fisso in uno degli estremi
I = I0 + mD2 = m L2 / 12 + m L2/4 = m L2 / 3
applicazione di huygens-steiner: calcola il momento d’inerzia di un disco con punto fisso in un estremo
I = I0 + mD2 = ½ m R2 + mR2 = 3/2 m R2
applicazione di huygens-steiner: calcola il momento d’inerzia di una sfera con punto fisso in un estremo
I = I0 + mD2 = 2/5 R2 m + m R2 = 7/5 R2 m
applica il teorema di Huygens-Steiner all’enercia cinetica nel caso di una rotazione attorno ad un asse fisso che non passa per il centro di massa
K = ½ I w2 =(H-S)= ½ (ICM + mD2) w2 = ½ ICM w2 + ½ m v2
Va a spiegare il teorema di Konig per l’energia cinetica, infatti
energia cinetica NEL CM
energia cinetica DEL CM
quando abbiamo un moto di precessione?
quando c’è un momento esterno non parallelo a L
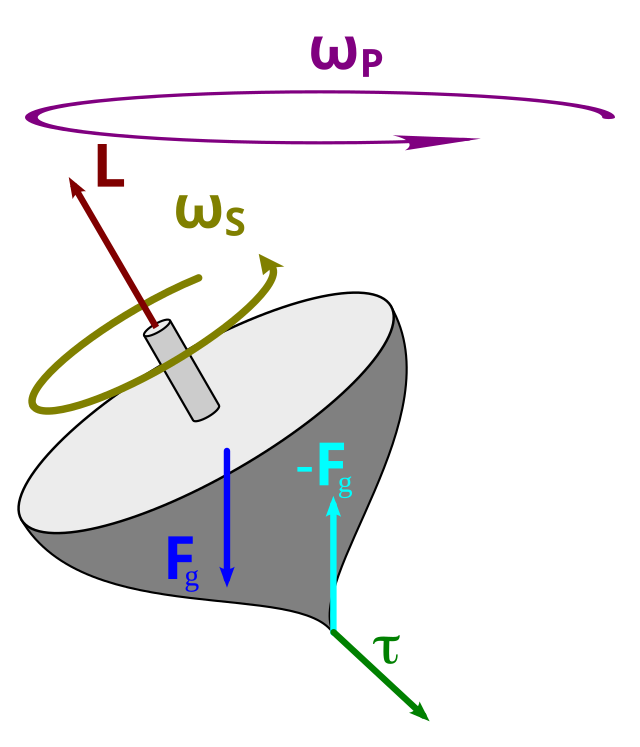
dimostra la velocità angolare di precessione
considero due masse attaccate da un asta che ruotano sull’asse di rotazione che passa per il centro dell’asta, inclinato di un angolo θ rispetto l’asse.
so che la componente perpendicolare all’asse di rotazione del momento angolare Lp * w = 0
Poiché il moto delle due masse è circolare ci deve essere una forza che le spinge costantemente verso l’interno, ma:
momento delle forze con forza peso: (r2 = -r1)
r1 x mg + r2 x mg = (r1 - r1) x mg = 0
allora calcolo per una generica F, sapendo che F2 = -F1
r1 x F1 + r2 x F2 = r1 x F1 + (-r1) x (-F1) =
= 2r1 x F1 = Mtot
Che sappiamo essere perpendicolare al piano individuato da r e F (verso individuato dalla regola della mano destra)
Adesso studio il verso z:
dLz/dt = Mz = 0 perché M è perpendicolare a w
quindi Lz si conserva
L = r1 x mv1 + r2 x mv2 = 2r1 x mv1
quindi L è perpendicolare al piano individuato dai vettori r e v.
F perp v
r x F perp r x v = M perp L = dL/dt perp L
per cui dz/dt = 0 e L * dL/dt = 0
quindi tutto L si conserva → anche Lp
Uso la formula di Poisson per cui esiste Ω perp a Lp e dLp/dt tale che Ω x Lp = dLp/dt
Ma L è perpendicolare alla sbarra e ruota con essa, quindi anche Lp ruota con w e pertanto precede
Mi definisca il vettore momento angolare L per un corpo rigido che ruota con velocità angolare ω attorno a un punto fisso O. Partendo dalla definizione integrale L=∫r×(ω×r)dm, mi mostri come emerge la struttura della matrice d'inerzia e mi spieghi, dal punto di vista fisico, perché in generale il vettore L non è parallelo a ω. Qual è la condizione geometrica affinché tale parallelismo sia verificato?
spiega come mai avviene la precessione degli equinozi
trova la relazione dìtra la velocità di precessione omega grande e la velocità di rotazione omega piccolo con l’esempio della trottola
Cosa accade se forziamo un corpo a ruotare attorno a un asse che NON è principale? Mi descriva la nascita del momento delle forze esterne M necessario per mantenere tale rotazione
spiega come calcolare l’energia cinetica di un corpo rigido che ruota attorno ad un punto fisso
quando avviene un moto di puro rotolamento? dimostra che entrambi i modi di vedere il rotolamento sono equivalenti
Quando un corpo ruota senza strisciare attorno al punto di contatto
Come si calcola l’energia cinetica di un corpo in moto di puro rotolamento?
K = ½ Ic w2 = (H-S) = ½ w2 (ICM + mR2) =½ ICM w2 + ½ m v2CM
= ½ m (wR)2 + ½ ICM w2