kine 301 exam
1/47
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
48 Terms
The three stages of the information processing model of the CNS – short answer
Stimulus identification - recognizing and interpreting incoming sensory information
Response selection - deciding what response to make
Response programing - initiating and coordinating the movement response
Write an example (not the traffic light example) that illustrates the three stages of information processing – short answer
Stimulus identification: sees the pitcher throw the ball
Response selection: decides to swing based on the ball’s trajectory
Response programming: initiated and executes the swing
s the integration of sensory information for postural control the same all the time, every time?
No integrating is not always the same, it adapts based on context, environment, and task demands (ex: vision is more important on uneven ground)
Stimulus Clarity, Stimulus Intensity, and Stimulus Modality
Stimulus clarity: clear stimuli = faster response time
Stimulus intensity: stronger stimuli = faster response
Stimulus modality: some senses (ex: vision) may be processes faster/slower depending on task
Examples of Good and Poor S-R Compatibility
Good s-r compatibility: the stimulus and response are well matched and easy to associate
Ex: turning steering wheel left = car turns left
= faster reaction time, fewer errors
Poor s-r compatibility: the stimulus and response are mismatched or unintuitive
Ex: stove burner knob in a random order
= slower reaction time, more errors
If uncertainty doubles, does reaction time increase by a near constant amount?
Yes, according to hicks law, reaction time increases by near constant amount when the number of choices (uncertainty) doubles
Ex: RT = a+b * log2(N), N = number of choices
What are the potential reasons that will decrease reaction time?
Practice and experience
Clear and intense stimuli (high clarity and intensity)
Anticipation or cueing
Simple tasks or few choices
Focused attention
Optimal arousal level (not too tired or overstimulated
Reaction time changes with and without a fore period
With foreperiod (predictable cue/timing): RT is shorter and more consistent
Without foreperiod (random timing): RT is longer and more variable
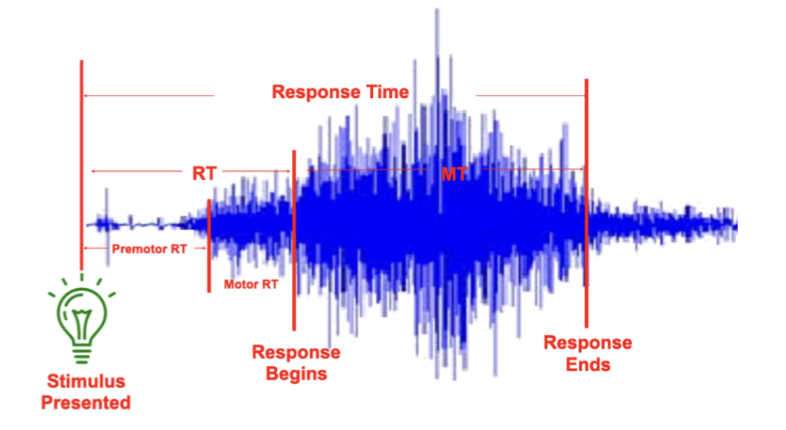
What is Response Time
Response time = reaction time + movement time
RT: time from stimulus to movement initiation
MT: time from movement start to completion
The premotor and motor components of reaction time.
Premotor time: stimulus onset -> muscle activation begins (planning and processing time)
Motor time: muscle activation -> movement begins (time to generate movement force)
The factors that increase reaction time according to Hick’s Law
More choices = longer RT
Unfamiliar or complex responses
Low stimulus clarity or intensity
Unexpected or random stimulus timing
The components of postural control are Postural Orientation, Postural Equilibrium, and Anticipatory Postural Adjustments.
Postural orientation - alignment of the body with respect to gravity, the support surface, and environment (ex: upright standing posture)
Postural equilibrium - the ability to maintain or return the balance during static or dynamic tasks
Anticipatory postural adjustments (APAs) - muscle actions before voluntary movement to counteract expected disturbance (ex: tighten core before lifting leg)
Define postural equilibrium
The ability to maintain balance by managing the relationship between center of mass and base support, especially in response to internal or external forces
Does the center of pressure measure postural sway?
Yes - center of pressure is used to quantify postural sway, tracking how often pressure shifts under the feet while maintaining balance
Vision’s role in the control of posture.
Vision helps determine body position relative to the movement, detects movement, and aids balance. Removing visual input (ex: eye closed) typically increase sway and reduces stability
Factors that increase postural sway
Fatigue
Aging
Injury or neurological disorders
Poor vision or eyes closed
Unstable or uneven surfaces
Distractions or dual tasking
Muscle recruitment patterns to correct postural perturbations, Distal or Proximal first?
Distal muscles activate first followed by proximal muscles. Ex: after a forward push, ankle muscles (distal) engage before hip/trunk muscles (proximal) to restore balance
The Theory of Optimal Control, Equilibrium Point Hypothesis, and Leading Joint Hypothesis
theory of optimal control:
CNS selects the most efficient movement strategy based on minimizing effort, error, or time
Movement is planned and controlled to optimize outcomes
Equilibrium point hypothesis:
CNS sets a final position (endpoint) and muscles behave like springs that naturally bring limbs to that positon
Movement occurs by shifting the body’s equilibrium points
Leading joint hypothesis (LJH):
One joint (the “leading joint”) initiates and generates the more torque, while subordinate joints adjust accordingly
Human limbs are linked segments, and movements are coordinated from leading to subordinate joints
What is the hypothesis that proposes that with multiple solutions to perform a movement, the selected movement solution is because the CNS programs the endpoint location
Equilibrium point hypothesis - CNS programs the final position, not the whole path
Is there a hypothesis that describes our muscle function as springs?
Yes, equilibrium point hypothesis describes muscle function like springs, returning to equilibrium
Interaction torques – Good, Bad, or Ugly?
Good: can assist movement, saving energy (ex: swinging a bat)
Bad: can disrupt movement if not controlled, especially during movement if not controlled, especially during multi joint coordination
Ugly: if mismanaged due to injury or fatigue, can cause unstable or awkward movements
What torque is greatest at a leading joint?
The greatest torque at a leading joint is the muscle-generated torque, used to initiate and drive movement efficiently through the limb.
The characteristics of a leading joint in the Leading Joint Hypothesis?
Initiates movement
Generates largest torque
Controls the overall movement pattern
Influences motion at subordinate joints via interaction torques
The LJH proposes that human limbs are linkages of several segments.
Each limb consists of multiple joints (ex: shoulder, elbow, wrist) and segments (ex: upper arm, forearm, hand)
Movements at one joint affect motion at others due to these physical linkages
The leading joint initiates motion, while subordinate joints adjust their actions based on the forces (like interaction torques) generated by the leading joint’s movement
This matters bc it emphasizes coordinated control of these linked segments to produce smooth, efficient, and purposeful movement
Know the term Degrees of Freedom
DOF refers to the number of independent ways a joint or system can move
Each joint has a specific DOF based on its anatomical structure
Movements can occur in different planes (ex: up down, side to side, rotation
Ex: shoulder joint: 3 DOF (flexion/extension, abduction/adduction, internal/external rotation)
The cns must coordinate DOF to produce smooth and efficient movements
What is the function of subordinate joints?
subordinate joints play a supportive role in movement
Key functions:
Coordinate with the leading joint to ensure smooth, efficient movement
Adjust and compensate for the forces (ex: interaction torques) generates by the leading joint
Help achieve accuracy, stability, and fine control of the movement’s end goal
Maintain balance and posture during dynamic actions
Ex: reaching for an object
Shoulder (leading joint) initiates the reach
Elbow and wrist (subordinate joints) adjust to guide the hand precisely to the target
In the LJH, what happens when there is decreased control due to reduced neural processes?
Reduced neural input disrupts planned coordination, causing the limb segments to move less harmoniously, which negatively affects performance, accuracy, and safety.
Poor coordination between leading and subordinate joints
Subordinate joints fail to properly compensate for interaction torques
Movements become less efficient, more variable, and possibly unstable
Inc energy cost and effort to complete tasks
Greater risk of movement error or inability to accurately reach the intended goal
The LJH as it relates to running – short answer.
In running, the hip joint acts as the leading joint, generating the largest torque to initiate leg movement. The knee and ankle (subordinate joints) coordinate their actions in response to the hip’s motion, adjusting fro interaction torques to ensure efficient propulsion, balance, and stride control. Coordination allows for smooth, energy efficient running and proper force distribution through the limb
The difference between Feedforward Control and Feedback Control when catching a ball with eyes open and with eyes blocked.
Feedforward control - movement is planning in advance, based on prediction, wo relying on real time sensory input
Ex: catching a ball w eyes blocked:
You rely on memory and predication of the ball’s speed, direction, and timing
No visual updates -> adjustments can be made midaction
Accuracy depends on how well u anticipated the ball’s trajectory
Feedback control - movement is adjusted in real time based on sensory input (ex: vision, touch)
Ex: catching a ball with eyes open
You can see the ball and make on the fly corrections to your hand position
Visual feedback helps improve accuracy and timing of the catch
The problems to consider with multi-joint movements
Coordination complexity
multiple joints must work tg precisely to achieve smooth, efficient movement
Interaction torques
Movement at one joint can cause forces (torques) at other joints, which can assist or disrupt the intended motion
These torques must be anticipated and controlled
Inc degrees of freedom (dof)
More joints = more dof, making it harder for the cns to control and stabilize the movement
Timing issues
Movement need correct sequencing (ex: leading joint first) for accuracy and balance
Energy efficiency
A smaller error at one joint can be magnified by downstream joints, affecting the end result
Postural stability
More moving joints can make it harder to maintain balance, esp during dynamic tasks
How is accuracy affected if you increase your bat/golf swing?
When you inc the speed or force of your bat or golf swing accuracy typically dec
Fast movements introduce more variability in motor output
There is less time to make corrections
Force variability inc at lower to moderate force levels, making it harder to control the exact movement path
Key concepts: this reflects the speed-accuracy trade off as movement speed inc, accuracy dec, esp in task requiring precise targeting
In Fitts’ Law, movement time vs index of difficulty is plotted. The slope corresponds to what?
The movement time (MT) is plotted against the index of difficulty (ID) in fitts law, the slope corresponds to the performer's information processing rate
It reflects how much movement time incs as task difficulty incs
Steeper slope = slower processing (more time needed for harder tasks)
Shallower slope = faster processing (less time inc per unit of difficulty)
Fitts law equation: MT = a + b * ID
A = y intercept (baseline movement time for simple tasks
B = slope (info processing time per unit of difficulty)
As the amount of force required increases, at what percent of maximum force does the variability of force begin to decrease?
Variability of force begins to dec at around 70% of maximum force
Explanation:
Low to moderate force levels, force variability inc as force inc
But once the force exceeds abt 70% of mac, the variability starts to dec due to
Greater recruitment of high threshold motor unit
More consistent firing patterns from motor neurons
Summary:
<70% max force -> more variability
>70% max force -> less variability (force output becomes more stable)
In the Fitts’ Law equation, what does the y-intercept signify?
MT (movement time) = a + b * ID (index difficulty)
Y intercept (a) = baseline movement time when ID is zero - meaning the task is rlly each (ex: very large target at a short distance)
Y intercept means the minimal time it takes to initiate and execute a simple movement
Reflects non difficulty related delays like reaction time, motor initiation, and basic movement preparation
Factors that Are and Are Not part of the Fitts’ Law calculation.
Fitts law is based on the relationship between:
Distance to the target (D) - how far u need to move
Target width (w) - how big or small the target is
These 2 factors determine the index of difficulty (ID): ID = log2(2D/W)
NOT part of fitts law calculation:
Force required to move
Muscle fatigue
Stimulus clarity or intensity
Reaction time
Environmental conditions
Individual experience of skill level (though it may affect slope/intercept, not the formula)
Type of feedback (visual auditory)
Examples of Feedforward and Feedback tasks
Feedforward (planned movements wo real time adjustments)
Throwing a dart at a dartboard
Swinging a bat at a pitched ball
Jumping to catch a ball w eyes closed
Typing on a keyboard wo looking
Feedback (movements adjusted using sensory input during the task)
Balancing on an unstable surface (using vision and proprioception)
Catching a ball w eyes open (adjusting hand position)
Diving an steering around curves
Walking on uneven ground (adjusting steps in real time)
Define Feedback Control.
Feedback control - process of adjusting movements during or after an action based on real time sensory info (ex: vision, touch)
Key points:
Allows for corrections if something unexpected happens
Involves a sensory loop: stimulus -> response -> sensory feedback -> adjustment
Slower than feedforward control due to processing time for the feedback
Ex: catching a ball w eyes open - u adjust your hand’s position based on visual feedback of the ball’s trajectory
Define Impedance Control.
Impedance control - regulation of muscle stiffness, damping and resistance to external forces to maintain stability and control movement
Key points:
Helps the body adapt to unpredictable forces (ex: someone bumping into you)
Involves adjusting muscle tone to make joint more rigid or more flexible depending on the task
Essential for fine motor control, postural stability, and interacting w the environment safely
Ex: holding a cup of coffee while someone brushes past u, your muscles adjust stiffness to resist spilling the coffee wo overreacting
The function of reflexes for eye control while the head is moving
Reflex involved is the vestibulo ocular reflex (vor)
Function:
Stabilizes your gaze by producing eye movements that are equal in magnitude but opposite in direction to head movements
Allows you to maintain clear vision (keep objects in focus) even while your head is moving
Ex: when you turn your head to the right, the vor moves your eyes to the left at the same speed, so you can keep your gaze fixed on an object
Summary: reflexes like the vor are essential for eye stability, balance, and visual clarity during movement
The logarithmic relationship between movement speed and timing on accuracy.
Relationship describes by fitts law which shows that as movement speed inc, accuracy dec, in a logarithmic fashion
Key ideas:
When tasks require greater speed, they become less accurate - esp for small or distant targets
Conversely, to maintain high accuracy, you must slow down your movement
Speed inc = accuracy dec
Small inc in difficulty lead to progressively greater inc in movement time to maintain accuracy
Formula: movement time (MT) = a + b * log2 (2D/W)
D = distance to target
W = width (size) of target
The logarithmic part (log2 (2D/W)) represents index of difficulty (ID)
· What is the relationship between target size and reaction time?
As target size dec, rection time in - meaning smaller targets lead to longer reaction times
Smaller targets require more precision, so the brain takes more time to plan the movement accurately
Tied to fitts law, where smaller targets inc task difficulty, leading to slower reaction and movement times
Smaller target -> larger reaction time
Larger target -> shorter reaction time
What defines the beginning of the Stance Phase?
The beginning of the stance phase is defined by initial contact, also known as heel strike - the movement when the heel of the foots first touches the ground during walking or running
Start stance phase = heel contract w the ground
Marks the transition from the swing phase (foot in the air) to stance phase (foot on the ground)
What defines the end of the Stance Phase?
The end of the stance phase defined by toe-off, called pre-swing - the moment when the toes of the foot leave the ground, transitioning into the swing phase
End stance phase = toe leaves the ground (toe off)
Marks the start of the swing phase, where the leg moves forward through the air
· Stance phase comprises what percent of the total gait cycle (1 stride)?
The stance phase makes up approx 60% of the total gait cycle (1 full stride)
Breakdown:
Stance phase: ~60% (foot is on the gound)
Swing phase: ~40% (foot is in the air)
Is gait velocity related to stride length?
Yes, gait velocity is directly related to stride length
Stride length inc, gait velocity (walking speed) generally inc - assuming cadence (steps per minute) also stays the same or inc
Faster walking or running usually involves longer strides and higher step freq
Formula: gait velocity = stride length * cadence
During exercise, your muscles may fatigue, so what should you expect to observe?
Dec force production
Muscles generate less force, making movements feel harder
Slower contractions and movements
Reaction time and movement speed may slow down
Inc muscle tremors or shaking
Due to motor unit firing variability and less coordinated muscle activity
Poorer coordination and accuracy
Movements become less precise and more variable
Inc effort perception
Tasks feel more difficult, even if they ar the same intensity
Changes in posture or technique
Fatigue may cause compensations ore form breakdown
Long sustained muscle contractions may cause shaking. What is the reason for this?
Shaking during prolonged muscle contractions happen due to motor unit fatigue and firing variability
Motor unit fatigue
As motor units tire, the body recruits additional units irregularly to maintain force
This leads to uncoordinated contractions, causing visible shaking
Firing rate variability
Inconsistent firing patterns to motor neurons as they try to sustain force lead to tremors or twitches
Impaired synchronization
Motor unit fire in a coordinated rhythm, but fatigue disrupts this, resulting in jerky, unstable force output
Muscle shaking = fatigue induced variability in motor unit activation as the body struggles to maintain force
Do supraspinal structures that control voluntary movement contribute to decreased muscle force during fatigue?
Yes, supraspinal structures (brain regions above the spinal cord, like the motor cortex) do contribute to dec muscle force during fatigue
Reduced motor cortex excitability
Fatigue can cause less effective activation of motor neurons from the brain
Altered motor command output
The brain sends weaker or fewer signals to muscles, reducing voluntary force
Inc perception of effort
Fatigue may cause the brain to “limit output” to avoid overexertion, further reducing force
Supraspinal fatigue = brain level fatigue that reduces voluntary muscle force by dec the quality of motor signals sent to muscles
Are there changes in the motor cortex as you fatigue?
Yes, there are changes in the motor cortex during fatigue, and these changes contribute reduced muscle performance
Dec excitability
The motor cortex becomes less responsive, making it harder to activate motor neurons effectively
Altered signal output
Strength and precision of signals to muscles decline, leading to weaker contractions
Inc effort perception
The brain perceives tasks more difficult which can limit voluntary drive to the muscles
Slower reaction times
Neural processing and response initiation slow down, affecting timing and coordination
Fatigue alters motor cortex function, reducing its ability to effectively drive muscle contractions, which leads to weaker, less coordinated movements
response time