Week 2 Kinetics, Biomechanical Principles 1
1/50
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
51 Terms
linear load
force
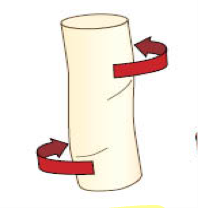
angular/rotational loads
torque
loads on tissue
push or pull, move, fixate, deform, injure
tension
pulls in opposite directions
compression
pushes inwards in same direction
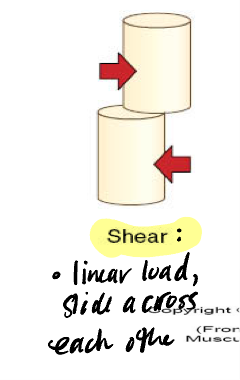
shear
force pushes across each other
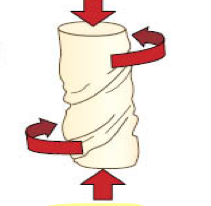
torsion
combined loading
tension on tendon
generally good at resisting
compression on cartilage
generally good at resisting
internal forces on joints
muscle force
external force
gravity, weight, etc
joint reaction force
produced between the surfaces of the joint and any other periarticular structure (arthritis may cause this)
equation for forces of the arm
internal force = external force + joint reaction force
torque equation
= force x distance from axis of rotation (moment arm)
isotonic contraction
type of contraction where the muscle length changes but the contraction doesn’s (examples are concentric and eccentric)
isometric force
muscle activation with no significant change in muscle length or joint angle, internal torque = external torque
concentric force
contraction with muscle shortening in lenth, example: raising a glass of tea to mouth (flexion)
eccentric force contractions
contraction with muscle lengthening, example: squatting down to the floor (hip and knee extensors)
agonist
prime mover muscle
antagonist
muscle that does the opposite motion
synergist
muscles that work together, synergistically
force couples
special kind of synergists, two muscles that work in opposite directions to rotate a body part, example: upper trap and lower trap rotate glenoid cavity upwards
1st class lever
axis of rotation is in the middle, example: atlanto-occipital joint
2nd class lever
load is in the middle, example is ankle plantar flexion
3rd class lever
force is in the middle, example is elbow flexion, shoulder flexion, this is what our body has most of
mechanical advantage
MA = ration of y to x, where y is the internal force moment arm, x is the external force moment arm
work
W = F x D , where F is force and D is distance
MA of less than 1
larger force required because the external moment arm is greater
MA of greater than 1
smaller force requires because the internal moment arm is larger
2nd class levers trade offs
can move a BIG load but at a small ROM
3rd class levers trade offs
can move through a large ROM but require a lot more force, more joint reaction forces, but have more velocity too
Newton’s 1st Law
Law of Inertia, a body at rest will stay at rest, a body in motion will stay in motion (unless acted on by an external force)
Newton’s 2nd Law
law of acceleration, the amount of acceleration depends on the magnitude of force aplide to the object and is inversely proportional to the object’s mass (sum of F = m x a)
CoM
center of mass close to the center of gravity, assumes the mass is evenly distributed throughout the body, around S2 for the average person
mass moment of inertia
distribution of mass about an AoR, can change the torque required to produce change in movement
Newton’s 3rd Law
Law of action-reaction, for every action there is an equal and opposite reaction, a force applied will be responded to by a force of equal magnitude in the opposite direction
anthropometry
measurement of the physical body, some measurements: length, mass, weight volume, measurements of the physical body
free body diagram
simple sketch representing the interaction between body and environment, with forces represented by vectors
force
a push or pull, = ma, need to consider the vector quantity, spatial orientation, point of application
Torque when related to force
Torque = F x MA
force systems
classified by direction and point of application, type of systems include linear, parallel, and concurrent
force vectors
lines that represent direction, magnitude, acceleration of force, can be combined from heads-to-tail method (tip to tail)
linear force systems
2 or more forces acting on the same segment, in the same plane, and along the same line, may be in the same or opposite directions
parallel force systems
exists whenever two or more forces are applied to the same system parallel to each other (ex knee brace)
concurrent force systems
2 or more forces acting on the same segment, but act in different directions, net of 2 forces = resultant force, can result in stabilization or redirection of force (example is the patella)
requirement to produce torque
a force and the moment arm must intersect at a 90 degree angle, the rest will cause translation
vector resolution
when a single force is applied at an angle other than 90 to the axis of rotation the individual vectors are worked backwards (resolved) into the concurrent components
Ground reaction force
force that the ground exerts back against your foot when it strikes
joint reaction force .
the force that the joint exert back against forces from muscle, passive tissues, and gravity
GRF and JRF
makes the action = reaction equation work, otherwise there would be surplus force left over on one side of the equation