Distributed Control
1/49
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
50 Terms
What is Graph Theory?
It is a method used to model relationships or connections between agents in a network using nodes and edges.
What is the order of a graph?
The number of nodes (V) in the graph
What is a directed graph (digraph)?
A graph where connections between nodes (edges) have a direction.
What are the key components?
Nodes (Vertices): Represent agents or objects.
Edges: Represent connections or interactions between nodes.
Why is Graph Theory important?
It helps to model and analyze communication and interaction among multiple agents in a network.
What is a Laplacian matrix?
A matrix that represents the structure of a graph by showing the connections and node degrees.
How is it defined?
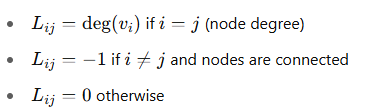
What is the matrix equation for the Laplacian?
L = D-A
D: Degree matrix (diagonal matrix of node degrees)
A: Adjacency matrix (shows connections between nodes)
What does the Laplacian matrix indicate?
The graph’s connectivity and structure.
Node connections and isolated nodes.
What are the key properties of a Laplacian matrix?

What does positive-semidefinite mean?
It indicates that the matrix does not have any negative eigenvalues, ensuring stability in graph analysis.
What is the Kronecker Product?
It is a matrix operation that takes two matrices A (size m×n) and BBB (size p×q) and produces a block matrix of size pm×qn.
How is it structured?
Each element aij in matrix A is multiplied by the entire matrix B, forming a larger matrix.
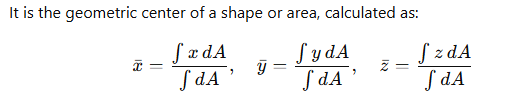
What is a Centroid?
Why are these important? Kronecker Product & Centroid:
Kronecker Product: Useful in matrix operations for multi-agent systems.
Centroid: Helps in determining the center of mass or balance point of an area.
What is a Voronoi Diagram?
It is a way of subdividing a space into regions based on the distance to a specific set of points, called generating points.
What is the formula for Voronoi Cells?

Steps to Construct a Voronoi Diagram:
Determine Midpoints:
Identify the midpoint of each line segment connecting pairs of generating points.
Draw Perpendicular Bisectors:
Draw the perpendicular bisector of each line segment. These bisectors form potential boundaries of the Voronoi cells.
Identify Voronoi Edges:
The edges of Voronoi cells are parts of the perpendicular bisectors and are equidistant from the two generating points they separate.
Construct Voronoi Cells:
Use the identified edges to form the complete Voronoi cells, creating regions around each generating point based on proximity.
Why is the Voronoi Diagram important?
It is used in multi-robot systems to allocate regions based on distance, optimize coverage, and manage spatial organization.
What is the control problem?
It involves determining how each agent gathers information through communication or sensing to make decisions.
What is a Local Control Problem?
Decisions are based only on information from neighboring agents.
Focuses on immediate surroundings and interactions.
What is a Global Control Problem?
Requires information from all agents in the network.
Ensures overall system coordination and consistency.
What is Centralised Control?
A single agent gathers global information and communicates with all other agents simultaneously.
What is Distributed (Decentralised) Control?
Each agent communicates only with its neighbors, relying solely on local interactions.
Eliminates single points of failure, making the system more robust.
What is a Network Control Problem?
It addresses control objectives and estimation methods for multi-agent systems within a network.
What are the key control objectives?
Consensus/Rendezvous: Achieving agreement among agents on a shared value or meeting at a common location.
Formation: Maintaining specific spatial arrangements among agents.
Coverage: Optimizing the distribution of agents to effectively cover an area.
What is Consensus?
It is the process of reaching agreement on a specific value or state based on the data from all agents in the network.
What is a Consensus Algorithm?
It is a rule that defines how agents exchange and update information to align their states.
What is the problem in Consensus?
Conflicting state information among multiple robots can lead to inconsistency.
What is Rendezvous?
It is the requirement for all agents to converge to a common point using only local information exchange.
How do agents communicate in Rendezvous?
Each agent xi gathers information from its neighbors xj to update its position.
What is the update equation?

What are Equilibrium Points?
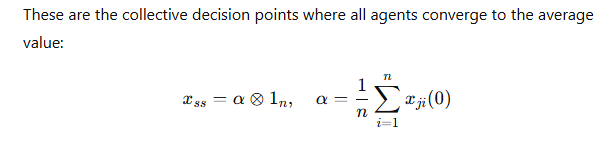
What does the coefficient αj represent?
The average of the initial values for undirected graphs, indicating the final agreed-upon state.
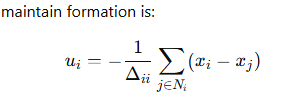
What is Formation Control?
It is the method of controlling the positions and movements of multiple agents to maintain a specific formation.
What is the dynamic model of each agent?

What control law is applied?
How is controllability determined?

Why is graph topology important in formation control?
The structure of connections determines how effectively agents can maintain or adjust their formation.
What is the Leader-Follower Strategy?
It involves designating some robots as leaders and others as followers who track the leader’s position and orientation.
What is the objective of the l−ϕl - \phil−ϕ controller?
To maintain a desired relative distance l12dl_{12}^dl12d and relative angle ϕ12d\phi_{12}^dϕ12d between the leader and follower.
What is the objective of the l−ll - ll−l controller?
To maintain specific distances between two leaders, denoted as l13dl_{13}^dl13d and l23dl_{23}^dl23d.
Why are these control methods important?
They ensure that followers stay in position relative to the leader(s), maintaining the desired formation structure
What is Coverage?
It involves distributing agents over a region based on specific criteria such as density, optimal placement, or sampling.
What is the objective in coverage?
To avoid clustering in the most interesting areas and to spread agents effectively over the entire region.
How is the deployment defined mathematically?
What role do Voronoi partitions play in coverage?
Voronoi partitions are used to define local contributions to the coverage function, ensuring each agent covers a distinct area.
What is the Coverage-Distortion Problem?
It is a mathematical approach to optimize agent deployment by minimizing the norm of the distance function over Voronoi regions.
How is the performance function defined?

What is the Jacobian of the Coverage-Distortion function?
What is the interpretation of the Jacobian?
The stationary points of this function represent the centroids of the Voronoi partitions, indicating optimal agent positions.