ISD baza do strony 8 pytanie 9 definicje
1/39
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
40 Terms
Uchybem sterowania układzie regulacji ze sprzężeniem zwrotnym nazywamy
a) różnicę pomiędzy sygnałem z zadajnika i sygnałem czujnika pomiarowego
b) różnicę pomiędzy sygnałem z zadajnika a sygnałem na wyjściu obiektu
c) różnicę wartości zadanej oraz sygnału wyjściowego
d) różnicę pomiędzy wielkością sterującą i wielkością wyjściową
c) różnicę wartości zadanej oraz sygnału wyjściowego
Zadaniem serwomechanizmu jest
a) utrzymanie wartości regulowanej na zadanym poziomie
b) śledzenie zmieniającej się w czasie wartości zadanej z jak najmniejszym uchybem
c) wykorzystywanie tzw. sprzężenia do przodu do minimalizacji wpływu zakłóceń
d) linearyzacja układów, opisanych równaniami, które w punkcie pracy mają ciągłą pierwszą
pochodną
b) śledzenie zmieniającej się w czasie wartości zadanej z jak najmniejszym uchybem
Układem liniowym nie jest układ
a) złożony z idealnych rezystorów, cewek i kondensatorów połączonych w tzw. gwiazdę
b) układ dynamiczny, którego zależność sygnału wyjściowego y(t) od wejściowego u(t) opisuje
zależność y(t) = u(t-7)+3du(t) /dt
c) układ statyczny, którego zależność sygnału wyjściowego u do wejściowego u opisuje zależność
y=3u+7
d) idealny wzmacniacz operacyjny
c) układ statyczny, którego zależność sygnału wyjściowego u do wejściowego u opisuje zależność
y=3u+7
Charakterystyką fazową idealnego układu opóźniającego (tzw. opóźnienie transportowe) jest
a) linia prosta
b) okrąg
c) jest to układ nieliniowy więc nie można wyznaczyć charakterystyk częstotliwościowych
d) eksponenta
b) okrąg
Odpowiedź skokowa układu drugiego rzędu opisanego modelem stanowym, którego macierz
A ma wartości własne położone na osi urojonej dla czasu dążącego do nieskończoności będzie
a) sinusoidą o narastającej amplitudzie
b) sinusoidą o malejącego amplitudzie
c) sinusoidą + składową stałą
d) sinusoidą
c) sinusoidą + składową stałą
Fazowe zmienne stanu służą do
a) opisu przesunięcia fazowego pomiędzy prądem i napięciem w układach RLC
b) opisu modeli układów zasilania trójfazowego
c) opisu układów cieplnych, gdyż mają one znaczenie zmiennych fizycznych
d) w przypadku układów II rzędu do analizy na tzw. płaszczyźnie fazowej
d) w przypadku układów II rzędu do analizy na tzw. płaszczyźnie fazowej
O układzie sterowania temperaturą zastosowano układ ze sprzężeniem zwrotnym i
regulatorem PI. Wiedząc, że wyjście układu określone jest w [*C] natomiast wielkość sterująca w
[kW] określ jednostki nastaw regulatora
a) kp[*C/kW], ki[*C/(kW*sek)]
b) kp[kW/*C], ki[kW/(*C*sek)]
c) kp[kW/*C], ki[sek*kW/(*C)]
d) kp[kW], ki[kW/(*C)]
b) kp[kW/*C], ki[kW/(*C*sek)]
Cechą charakterystyczną charakterystyki amplitudowej układu drugiego rzędu dla zerowego
współczynnika tłumienia jest
a) wystąpienie szczytu rezonansowego dla pulsacji mniejszej od pulsacji drgań własnych
b) wystąpienie szczytu rezonansowego dla pulsacji większej od pulsacji drgań własnych
c) szczyt rezonansowy o nieskończonej wysokości
d) odpowiedź skokowa jest aperiodyczna krytyczna więc rezonans nie wystąpi
c) szczyt rezonansowy o nieskończonej wysokości
Uproszczenie zera z biegunem przy wyznaczaniu transmitancji układu na podstawie modelu
stanowego może skutkować:
a) utratą stabilności w sensie BIBO
b) zmniejszeniem odporności układu na zakłócenia
c) w przypadku modeli nieliniowych uproszczenie takie nie jest możliwe, gdyż uzyska się wtedy
układ o niższym rzędzie niż pierwotny
d) wszystkie powyższe odpowiedzi są błędne
d) wszystkie powyższe odpowiedzi są błędne
Odpowiedź naturalna układu zależy od ??
a) warunków początkowych oraz wartości własnych macierzy A modelu stanowego
b) sygnału wejściowego oraz biegunów transmitancji układu
c) macierzy A, B i C oraz nie zależy od macierzy D modelu stanowego
d) jedynie od macierzy D modelu stanowego oraz warunków początkowych
a) warunków początkowych oraz wartości własnych macierzy A modelu stanowego
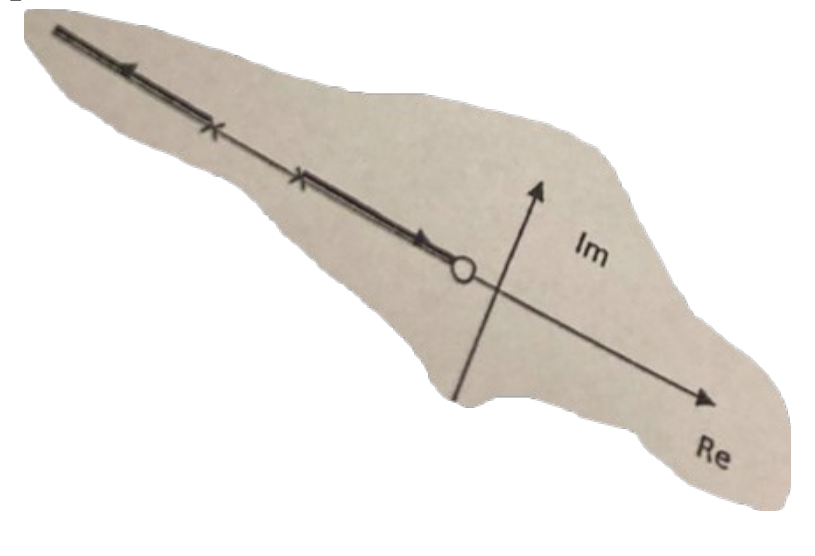
Na rysunku przedstawiono linie pierwiastkowe pewnego układu. Możemy o nim
powiedzieć, że:
a) układ ten nie jest stabilny dla dowolnego k ze względu na wystąpienie zera
b) wraz ze wzrostem wzmocnienia maleją oscylacje na wyjściu układu
c) w przypadku pobudzenia tego układu sygnałem sinusoidalnym, w stanie ustalonym na jego
wyjściu uzyskamy również sygnał sinusoidalny
d) dla wartości wzmocnienia dążących do nieskończoności odpowiedź impulsowa układu ma
charakter narastających drgań
c) w przypadku pobudzenia tego układu sygnałem sinusoidalnym, w stanie ustalonym na jego
wyjściu uzyskamy również sygnał sinusoidalny
Czynnik (0,1s+1) znajdujący się w mianowniku pewnej transmitancji na asymptotycznych
charakterystykach częstotliwościowych Bodego dla pulsacji ω>100sek-1 wprowadzi
a) przesunięcie charakterystyki fazowej o 90°
b) przesunięcie charakterystyki fazowej o -45°
c) spadek wzmocnienia z szybkością 20dB/dek
d) spadek wzmocnienia o 3dB
c) spadek wzmocnienia z szybkością 20dB/dek
Zaletą zamkniętego układu sterowania w porównaniu z układem otwartym jest:
a) układ zamknięty ma zawsze szersze pasmo przenoszenia
b) nie ma problemów ze stabilnością układu zamkniętego
c) układ zamknięty jest mniej wrażliwy na zmiany parametrów obiektu
d) układ zamknięty jest mniej wrażliwy na zakłócenia
c) układ zamknięty jest mniej wrażliwy na zmiany parametrów obiektu
d) układ zamknięty jest mniej wrażliwy na zakłócenia
Odpowiedzią stabilnego stacjonarnego układu liniowego na sygnał sinusoidalny dla czasu dążącego do nieskończoności jest zawsze
a) układ ten wpada w rezonans więc sygnał wyjściowy ma charakter narastających drgań.
b) sygnał sinusoidalny o tej samej częstotliwości i amplitudzie dążącej do zera
c) sygnał sinusoidalny o tej samej częstotliwości
d) sygnał sinusoidalny o tej samej częstotliwości oraz jego wyższe harmoniczne
c) sygnał sinusoidalny o tej samej częstotliwości
Układ nieminimalnofazowy charakteryzuje się:
a) możliwością wystąpienia ujemnych wartości w początkowej fazie odpowiedzi skokowej
b) zerem lub zerami transmitancji w prawej półpłaszczyźnie
c) brakiem możliwości wyznaczenia odpowiedzi skokowej
d) układ nieninimalnofazowy jest zawsze niestabilny
a) możliwością wystąpienia ujemnych wartości w początkowej fazie odpowiedzi skokowej
b) zerem lub zerami transmitancji w prawej półpłaszczyźnie
Wartości własne macierzy A realizowalnego liniowego modelu systemu
a) są zawsze biegunami transmitancji tego systemu
b) decydują o stabilności systemu
c) są zawsze rzeczywiste lub zespolone sprzężone
d) decydują o przeregulowaniu odpowiedzi na skok jednostkowy
b) decydują o stabilności systemu
c) są zawsze rzeczywiste lub zespolone sprzężone
d) decydują o przeregulowaniu odpowiedzi na skok jednostkowy
Rząd samych zer w tabeli Routha świadczy o
a) występowaniu niegasnących drgań w odpowiedzi impulsowej układu
b) konieczności zamiany zera w pierwszej kolumnie na małą liczbę dodatnią dążącą do zera
c) wystąpieniu w wielomianie charakterystycznym pierwiastków w prawej półpłaszczyźnie
d) braku stabilności BIBO
a) występowaniu niegasnących drgań w odpowiedzi impulsowej układu
d) braku stabilności BIBO
Położenie biegunów dominujących układu decyduje o
a) paśmie przenoszenia układu
b) wartości przeregulowania
c) stabilności układu
d) szybkości układu
a) paśmie przenoszenia układu
b) wartości przeregulowania
c) stabilności układu
d) szybkości układu
Idealny człon opóźniający powoduje
a) poszerzenie pasma układu
b) zmniejszenie uchybu odpowiedzi skokowej w stanie ustalonym
c) zmniejszanie się wzmocnienia dla rosnących częstotliwości
d) wprowadzenie narastającego przesunięcia fazowego dla rosnących częstotliwości
d) wprowadzenie narastającego przesunięcia fazowego dla rosnących częstotliwości
Układ, w którym zależność sygnału wyjściowego y(t) od sygnału wejściowego u(t) opisana jest wzorem y(t)-3u(t)+1 jest
a) układem liniowym
b) układem dynamicznym
c) układem nieliniowym
d) układem stacjonarnym
c) układem nieliniowym
d) układem stacjonarnym
Transmitancją operatorową liniowego układu stacjonarnego jest
a) Transformata Laplace'a jego odpowiedzi skokowej
b) stosunek transformaty Fouriera sygnału wyjściowego układu do transformaty sygnału wejściowego przy założeniu zerowych warunków początkowych
c) stosunek transformaty Laplace'a sygnału wyjściowego układu do transformaty sygnału wejściowego przy założeniu zerowych warunków początkowych
d) stosunek sygnału wyjściowego do sygnału wejściowego przy założeniu zerowych warunków początkowych
c) stosunek transformaty Laplace'a sygnału wyjściowego układu do transformaty sygnału wejściowego przy założeniu zerowych warunków początkowych
Układ o transmitancji 1/(s*s) objęto jednostkowym, ujemnym sprzężeniem zwrotnym. W stanie ustalonym odpowiedź skokowa uzyskanego układu będzie
a) uzyskany układ nie będzie stabilny asymptotycznie więc odpowiedź nie będzie dążyła do stałej wartości
b) układ nie będzie stabilny asymptotycznie więc odpowiedź będzie dążyła do nieskończoności.
c) zawierała składnik stały oraz sinusoidalny
d) jest to układ o astatyzmie II stopnia więc uchyb będzie zerowy
a) uzyskany układ nie będzie stabilny asymptotycznie więc odpowiedź nie będzie dążyła do stałej wartości
c) zawierała składnik stały oraz sinusoidalny
Zastosowanie regulatora Pi w jednopętlowym układzie regulacji może spowodować
a) destabilizację układu ze względu na wprowadzenie ujemnego przesunięcia fazowego
b) zwiększenie stopnia astatyzmu układu
c) zredukowanie do zera uchybu odpowiedzi na skokową zmianę wielkości zadanej (pod warunkiem zachowania stabilności)
d) poszerzenie pasma układu
a) destabilizację układu ze względu na wprowadzenie ujemnego przesunięcia fazowego
b) zwiększenie stopnia astatyzmu układu
c) zredukowanie do zera uchybu odpowiedzi na skokową zmianę wielkości zadanej (pod warunkiem zachowania stabilności)
Płaszczyzna fazowa służy do
a) Zobrazowania w postaci wykresu zależności zmiennych stanu układu drugiego rzędu
b) Jest to inna nazwa charakterystyki fazowej Bodego
c) Zobrazowania przebiegu fazowych zmiennych stanu w czasie
d) Zobrazowania przesunięcia fazowego pomiędzy sinusoidalnym sygnałem wejściowym i wyjściowym
a) Zobrazowania w postaci wykresu zależności zmiennych stanu układu drugiego rzędu
Człon (s+100) umieszczony w mianowniku transmitancji układu spowoduje na jego amplitudowej charakterystyce Bodego
a) Dodatkowe przesunięcie fazowe o-90° dla pulsacji <<100(1/sek)
b) Spadek wzmocnienia o 20dB/dek dla pulsacji >>100(1/sek)
c) Wzrost wzmocnienia o 20dB/dek dla pulsacji <<100(1/sek)
d) Spadek wzmocnienia o 3dB/dek dla pulsacji >>100(1/sek)
b) Spadek wzmocnienia o 20dB/dek dla pulsacji >>100(1/sek)
Charakterystyka amplitudowa członu różniczkującego
a) dla członu idealnego dąży do nieskończoności natomiast dla członu rzeczywistego dąży do stałej wartości gdy pulsacja dążących do nieskończoności
b) dla pulsacji zerowej wzmocnienie osiąga OdB
c) w przypadku członu idealnego ma nachylenie -20dB na dekadę dla małych częstotliwości
d) w przypadku członu idealnego ma nachylenie -20dB na dekadę dla pulsacji dążących do nieskończoności
a) dla członu idealnego dąży do nieskończoności natomiast dla członu rzeczywistego dąży do stałej wartości gdy pulsacja dążących do nieskończoności
c) w przypadku członu idealnego ma nachylenie -20dB na dekadę dla małych częstotliwości
Regulator Pl w zamkniętym układzie regulacji powoduje
a) zmniejszenie zapasu stabilności
b) zmniejszenie do zera uchybu odpowiedzi skokowej w stanie ustalonym (pod warunkiem zachowania stabilności)
c) polepszenie procesów przejściowych
d) poszerzenie pasma układu
a) zmniejszenie zapasu stabilności
b) zmniejszenie do zera uchybu odpowiedzi skokowej w stanie ustalonym (pod warunkiem zachowania stabilności)
c) polepszenie procesów przejściowych
Korzystając z wykresu Nyquista możemy
a) określić stopień astatyzmu układu zamkniętego na podstawie wykresu dla układu otwartego
b) badać stabilność układu zamkniętego na podstawie wykresu dla układu otwartego
c) wyznaczyć wartość czasu narastania odpowiedzi skokowej układu zamkniętego na podstawie wykresu dla układu otwartego
d) wyznaczyć wysokość szczytu rezonansowego układu zamkniętego na podstawie wykresu dla układu otwartego.
a) określić stopień astatyzmu układu zamkniętego na podstawie wykresu dla układu otwartego
b) badać stabilność układu zamkniętego na podstawie wykresu dla układu otwartego
Uklad o transmitancji Go(s)=1/[s(s+1)] objęto jednostkowym, ujemnym sprzężeniem zwrotnym, a następnie poddano pobudzeniem rampą, O jego odpowiedzi możemy powiedzieć: a) Uchyb będzie narastał do nieskończoności
b) Będzie narastała do nieskończoności
c) Jest to układ o astatyźmie stopnia 1 więc uchyb ustalony będzie zerowy
d) Dla czasu dążącego do nieskończoności różnica pomiędzy sygnałem wejściowym i wyjściowym będzie dążyła do stałej wartości > O
b) Będzie narastała do nieskończoności
d) Dla czasu dążącego do nieskończoności różnica pomiędzy sygnałem wejściowym i wyjściowym będzie dążyła do stałej wartości > O
Wadą układu zamkniętego w porównaniu do układu otwartego jest
a) Sterowanie w układzie zamkniętym jest w każdym aspekcie lepsze od sterowania w układzie otwartym więc należy rezygnować ze sterowania w układzie otwartym.
b) Sterowanie w układzie zamkniętym jest bardziej wrażliwe na zakłócenia lub nieznajomość parametrów obiektu
c) Sterowanie w układzie zamkniętym jest droższe gdyż wymaga większej liczby elementów
d) Występuje możliwość utraty stabilności układu zamkniętego
c) Sterowanie w układzie zamkniętym jest droższe gdyż wymaga większej liczby elementów
d) Występuje możliwość utraty stabilności układu zamkniętego
Przewagą modelu stanowego nad modelem transmitancyjnym jest
a) Łatwiejsze wykreślenie charakterystyki Nyquista dla modelu stanowego, jeśli zmienne stanu są zmiennymi fazowym
b) Modele te są równoważne więc nie możemy mówić o przewadze jednego z nich
c) Możliwość uwzględnienia warunków początkowych w modelu stanowym
d) Elementy na przekątnej macierzy A modelu stanowego są jednocześnie biegunami transmitancji więc za pomocą modelu stanowego łatwiej określić czy układ jest stabilny
c) Możliwość uwzględnienia warunków początkowych w modelu stanowym
Układ o szerokim paśmie przenoszenia charakteryzuje się
a) Większą szybkością niż układ o wąskim paśmie przenoszenia
b) Mniejszym uchybem w stanie ustalonym niż układ o wąskim paśmie przenoszenia
c) Mniejszą odpornością na zakłócenia wysokoczęstotliwościowe niż układ o wąskim paśmie przenoszenia
d) Występowaniem dużego przeregulowania
a) Większą szybkością niż układ o wąskim paśmie przenoszenia
c) Mniejszą odpornością na zakłócenia wysokoczęstotliwościowe niż układ o wąskim paśmie przenoszenia
O odpowiedzi impulsowej liniowego układu stacjonarnego možna powiedzieć że:
a) jest odwrotną transformatą Laplace'a transmitancji
b) dla układów niestabilnych ma ujemne części rzeczywiste
c) jest pochodną odpowiedzi skokowej
d) jej splot z sygnałem pobudzenia daje odpowiedź układu na to pobudzenie
a) jest odwrotną transformatą Laplace'a transmitancji
c) jest pochodną odpowiedzi skokowej
d) jej splot z sygnałem pobudzenia daje odpowiedź układu na to pobudzenie
Wadą układów z pętlą sprzężenia zwrotnego jest
a) Możliwość utraty stabilności układu zamkniętego.
b) Większa wrażliwość układu zamkniętego na zmiany jego parametrów
c) Większa wrażliwość układu zamkniętego na zakłócenia
d) Konieczność stosowania większych napięć zasilających dla układu zamkniętego
a) Możliwość utraty stabilności układu zamkniętego
Transmitancją stacjonarnego, liniowego układu przyczynowego jest
Stosunek transformaty Laplace’a sygnału wyjściowego do transformaty sygnału
wejściowego przy założeniu zerowej wartości początkowej na wyjściu układu.
Odpowiedź w dziedzinie czasu stacjonarnego, liniowego układu przyczynowego to
Splot jego odpowiedzi impulsowej oraz sygnału pobudzenia
Liniowy układ stacjonarny o 2 wejściach i 3 wyjściach można opisać za pomocą macierzy:
Sześciu transmitancji
Pojemność cieplna ciała informuje nas o
Ilości ciepła, którą należy dostarczyć do ciała, aby ograć je o jednostkę temperatury
Metoda linearyzacji układu stacjonarnego w dowolnym punkcie xo może być zastosowana dla układu
Opisanego równaniem y=7*e^x+1 ( y- sygnał wyjściowy , x – sygnał wejściowy)