lecture 11 - principles of speed accuracy and coordination part 2
1/10
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
11 Terms
look at slides 9-21
what is a bimanual skill
Skill requiring the control and coordination of the two hands
what were the results of the bimanual fitts task
Movement of right limb affected by task demands of the left limb
Suggests the two limbs are coordinated, perhaps by a joint motor command / program
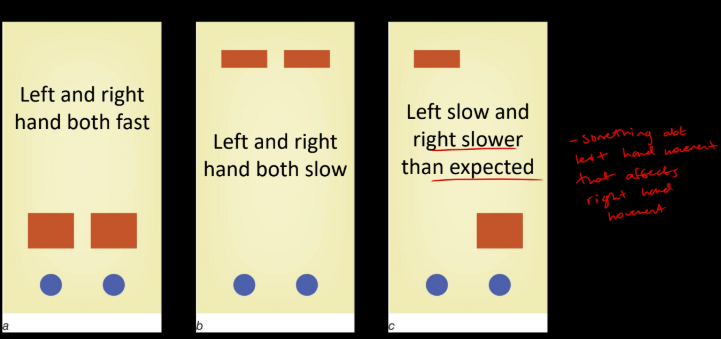
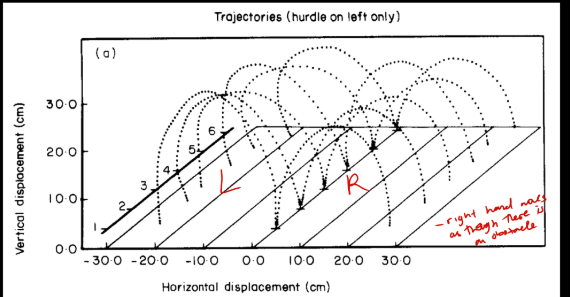
what were the results of the bimanual coordination with obstacles
Movement of right limb affected by task demands of the left limb
what did the gamma-v experiemnt tell you about coordination
What do the unimanual results tell us? That you can form a motor program for each independently
What do the bimanual results tell us? That the two motor programs cannot be run without significant interference. More evidence for single motor program limit.
what were the results of the continous timing for bimanual coordination
wiggling both fingers at the same time
most wiggled in phase (out in) and some anti-phase (same direction) and probs non wiggled out of phase
Research shows that in-phase and anti-phase bimanual movements are more stable than out of-phase. because they Have similar timing structure / rhythm – simplifies the joint motor program
and in phase is more stable than anti phase
why is a stable coordination better
Having a preferred (more stable) coordinated movement suggests another way the motor system solves the speed accuracy trade off.
When the demands of speed in one coordinated movement (e.g. anti-phase) produce too much error, we can switch to another coordinated movement (e.g. in-phase).
how does the degrees of freedom in a limb relate to bimanual coordination
This suggests that the degrees of freedom available to multi-limb coordinated movements is actually an advantage – can converge on more stable movement patterns each best suited to a specific speed (or set of conditions).
what is a summary of fitts law, linear speed accuracy trade off, and coordination stability
1) Fitts’ Law: general finding that MT slows as ID (proportional to A/W) goes up
2) Linear speed-accuracy trade off: For very rapid movements error increases with shorter MT and larger A
3) Coordination stability: When one pattern of movements becomes unstable due to speed, can switch to a more stable one
what are the results of parallel motor planning
slide 45-55
These results suggest that the brain does make more than one motor plan (program) at a time.
But, since we are usually limited to only one effector (e.g. reaching hand) the competition between plans is resolved either before movement, or, is reflected in the movement.
This work doesn’t speak to multi-limb movements which probably do require motor programs with some shared properties (e.g. shared timing structure).