Honours Differential Equations
1/47
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
48 Terms
How do we change an nth order ODE into first order?
change variables to x1 = y, x2 = y’ etc… xn = y(n-1)
Take derivatives of new variables
autonomous definition
If F is a function of only x, ie δtF = 0
Abels Thm
If W(t0) ≠ 0 for some t0 then W(t) ≠ 0 for all t
How to solve homogenous system with constant coefficients?
Find eigenvalues and eigenvectors of A
if real and different eigenvalues then x = sum(cnernξn)
If complex eigenvalues then x = c1u(t) + c2v(t) + ….. where u(t) = ert(acos(μt) - bsin(μt)) and v(t0 = iert(bcos(μt) + asin(μt))
If repeated eigenvalues then x(t) = c1ert ξ + c2(tert ξ + ertη)
can extend by just adding extra unknown vectors, e.g. if 3×3 then our 3rd solution is (t2/2)ert ξ + tertη + ertζ
Fundamental Matrix
ψ(t) = nxn matrix with fundamental solutions as columns
det(ψ(t)) = 0
x(t) = ψ(t)c
Matrix Exponentials
eAt = I + At + (1/2!)A2t + …
eA+B = eAeB if AB = BA
e0t = I
eAt = ψ(t) for ψ(0) = I
x(t) = eAtx(0) <=> eAt = ψ(t)ψ-1(0)
if T is diagonalisable then eAt = Tdiag (er1t , er2t , . . . , ernt )T −1
Variation of Parameters for non homogenous ODEs
dx/dt = P(t)x + g(t)
assume the homogenous part is solved by xhom = ψ(t)c
introduce x = Ψ(t)u(t) which we differentiate and sub into 1 to get Ψ (t)u(t) + Ψ(t)u (t) = P(t)Ψ(t)u(t) + g(t)
This reduces to Ψ(t)u (t) = g(t) since Ψ′ = P(t)Ψ
Thus u(t) = integral (Ψ−1(t)g(t))dt + u(t0)
so x(t) = Ψ(t)Ψ−1(t0)x0 + Ψ(t) * integral(t0-t)Ψ−1(s)g(s) ds
Diagonalisation for non homogenous ODEs
assume the corresponding homogenous system is solved with ri and ξi
We introduce a change of variables x = Ty so Ty = ATy + g(t) => y = (T−1 AT)y + T−1 g(t) = Dy + h(t)
note that T is normalised
We now have a system of n decoupled equations which we can solve by direct integration
If not diagonalisable then can use jordan form instead but note that won’t be decoupled so have to solve in correct order
Undetermined Coefficients for non homogenous ODEs
guess a solution for the non homogenous part and add to homogenous solution
need ateλt + beλt if g = ueλt
Stable critical point definition
if for all ε there exists δ > 0 such that every x(t) with |x(0)-x0| < δ satisfies lim (x(t)) = x0
asymptotically stable if its stable and attracting
Attractive critical point definition
if there exists δ > 0 such that every x(t) with |x(0)-x0| < δ satisfies lim (x(t)) = x0
ie if we start close the the critical point then we tends to it
Almost Linear systems
If we have x’ = F and y’ = G then we approximate this linearly by saying u’ = Au and u = x - x0 where A = a matrix with rows F and G and differentiating in columns by x and y
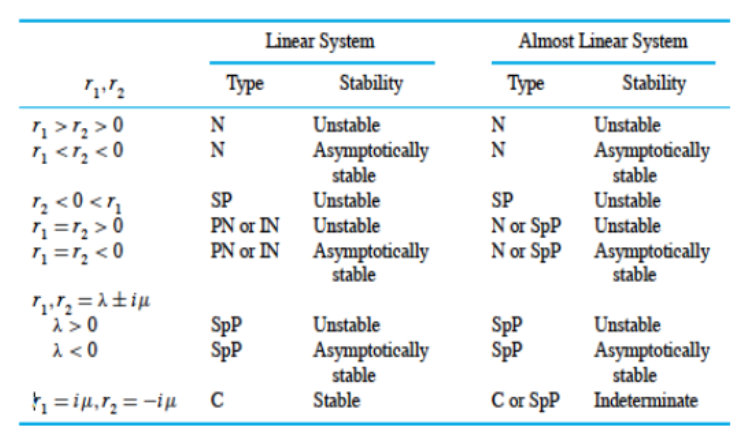
Critical points table for linear and almost linear systems
If table is not helpful then we can explicitly solve (may be helpful to switch to polar) or try plotting implicit trajectories
Conservation of Energy
dE/dt = (∂x E )x + (∂y E )y= ∇E · T (x, y ) = |∇E ||T | cos φ = 0 from conservation of energy
Thus the gradient vector and tangent vector are orthogonal
(semi)definite
Let E : D ⊂ R2 → R be defined on a domain D containing a
critical point x0.
E is positive [negative] definite if E (x0) = 0 and
E (x, y ) >(<) 0 ∀ (x, y ) != x0
E is positive [negative] semi-definite if E (x0) = 0 and
E (x, y ) ≥(≤) 0 ∀ (x, y )
Lyapunov’s 1st theory
Consider a two-dimensional autonomous system with an isolated critical point x0 and a region D ⊂ R2 containing x0. Suppose that there is a positive definite and continuous function E : D → R with continuous first partial derivatives, such that E (x0) = 0. If ∂xEF + ∂y EG is negative semi-definite [negative definite] on D [on D \ {x0}] then x0 is a stable critical point [asymptotically stable critical point ]
E is not necessarily energy here, have to guess E
Lyapunov’s 2nd theory
Suppose that there is a continuous function E : D → R with continuous first partial derivatives, such that E (x0) = 0 and that in every neighbourhood of (x0) ∃ at least one point x1 where E (x1) > 0. If ∂x E F + ∂y E G is positive definite on D then x0 is an unstable critical point
limit cycle
Limit cycles are closed trajectories such that at least one other
non-closed trajectory asymptotes to them as t → ∞ or t → −∞
Existence of Limit Cycles
given x’ = F (x, y ) , y’ = G (x, y )
Let F (x, y ), G (x, y ) have continuous first partial derivatives in
some simply connected domain D. Then a closed trajectory in D
must necessarily enclose at least one critical point. If it encloses
only one critical point, it can not be a saddle point.
Bernd Schroers Honours Differential Equations
if a simply connected D contains no critical points ⇒ no closed trajectories in D,if a simply connected D contains a unique critical point and it is a saddle ⇒ no closed trajectories in D
Let F (x, y ), G (x, y ) have continuous first partial derivatives in a simply connected domain D. If the divergence ∂x F + ∂y G has the same sign in D then there are no closed trajectories in D
Poincare-Bendixson theorem
Let F (x, y ), G (x, y ) have continuous first partial derivatives in a
two-dimensional domain D. Let D1 be a bounded subdomain of D
and let R consist of D1 and its boundary. Suppose R has no critical points. If ∃ a solution (x(t), y (t)) staying in R ∀ t ≥ t0 then either the solution has a closed trajectory or it spirals towards one. Either way, ∃ a closed trajectory
Fourier Convergence Theorem
The series converges to f (x) ∀ x where f (x) is continuous and to
[f (x+) + f (x−)]/2 at all points where f (x) is discontinuous
even and odd functions
A function f (x) is even if f (−x) = f (x).
A function f (x) is odd if f (−x) = −f (x)
Even: integral between L and -L = 2*integral between 0 and L
Odd: integral between L and -L = 0
Even: Only have cos in foureir
Odd: Only have sin
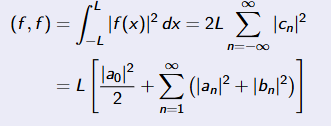
Parsevals Identity
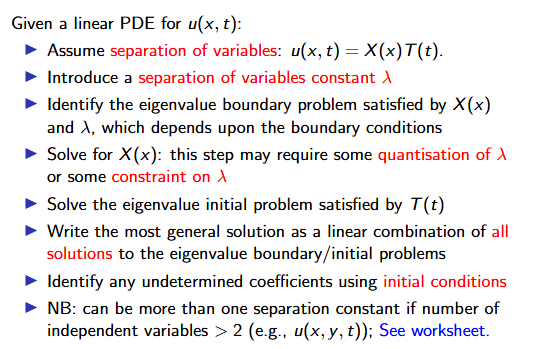
Separation of Variables method
method for non homogenous boundary conditions
define v (x) = lim u(x, t)
map to one with homogenous boundary conditions
u(x, t) = v (x) + ω(x, t)
What is Laplace’s equation in polar coords?
δ2u/δr2 + (1/r2)δ2u/δθ2 + (1/r)δu/δr = 0
Sturm-Liouville form
− [p(x)y′(x)]′ + q(x)y(x) = λr(x)y(x)
Sturm-Liouville boundary conditions
a1y(0) + a2y′(0) = 0
b1y(1) + b2y′(1) = 0
Lagrange’s identity
(L[u], v) = (u, L[v])
inner product
(u,v) = integral(0,1)[u(x)v*(x)]dx
⟨Ψ1, Ψ2⟩ = integral(0,1)[rΨ1Ψ2]dx = 0 if 1 ≠ 2
S-L properties
real eigenvalues
orthogonal eigenvectors
often useful to work with orthonormal eigenfunctions
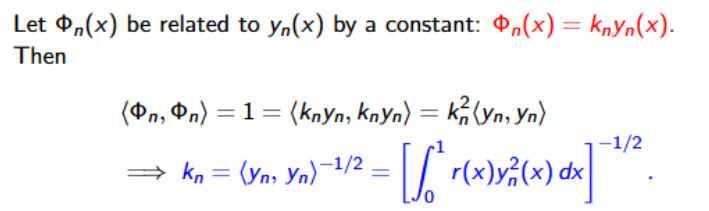
S-L solution
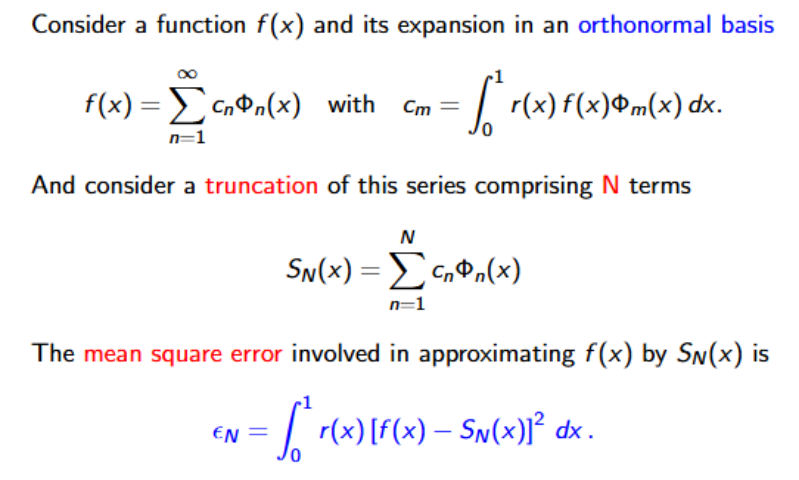
f(x) = sum(cnΦn(x))
where cn = integral(0,1)[rfΦn]dx
self-adjoint problems
needs to be of even order so (L[u],v) = (u,L[v])
non-homogeneous S-L ODEs
solve corresponding homogeneous
expand to non homogenous
y(x) = sum(bnΦn(x))
sub into ODE
sum(bn(λn − μ)Φn(x) = f/r
expand rhs
f/r = sum(cnΦn(x)) with cn = integral(0,1)[Φn(x)r(x)f(x)/r(x)]dx
so we have sum((bn(λn − μ)-cn)Φn(x)) = 0 thus each coefficient must disappear
solution: if μ ≠ λn then bn = cn/(λn − μ)
else we either have cm = 0 so no unique solution
or no solution as all
non-homogenous PDEs
singular S-L
test if Lagranges identity still holds
so need integral(0,1){L[u]v - uL[v]}dx = 0
if 0 singular replace 0 with ε and use limits
need limϵ→0 p(ϵ) [u′(ϵ)v (ϵ) − u(ϵ)v ′(ϵ)] = 0
S-L and convergence
if εN goes to 0 then the series converges in the mean to f(x)
Parsevals identity for S-L
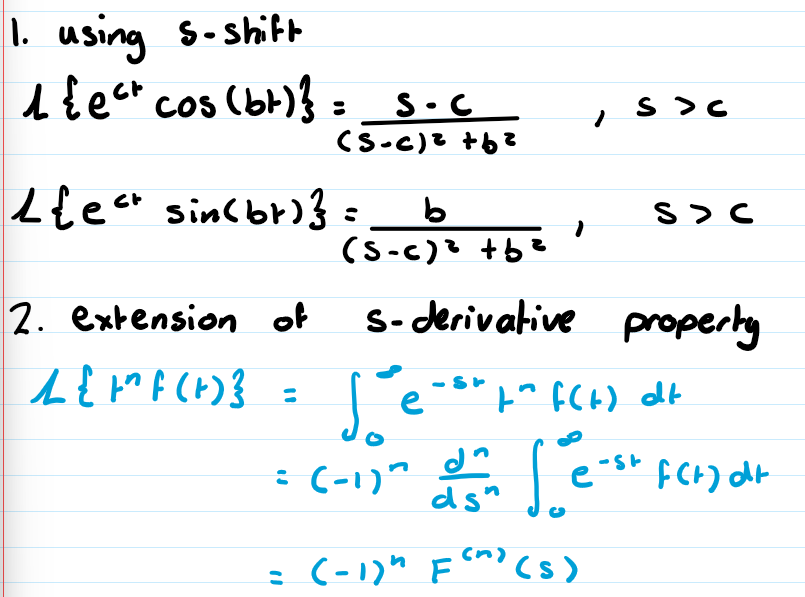
Laplace transform properties
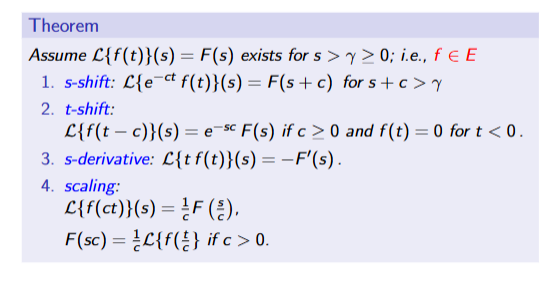
Laplace transform generalisations
unit step function
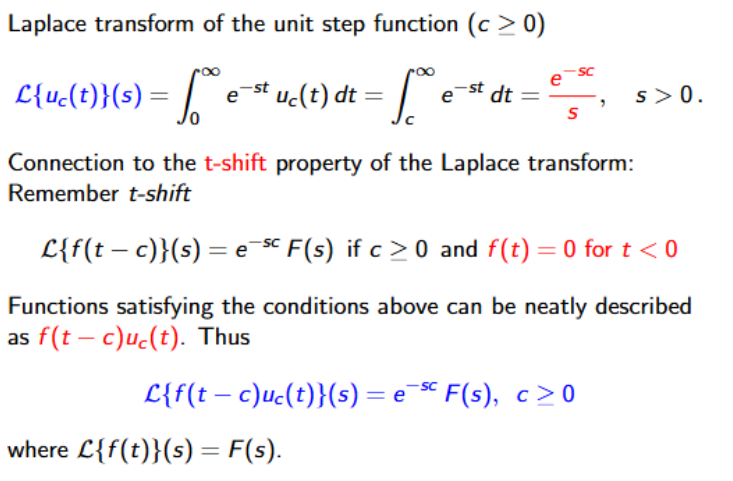
Laplace transform of unit step function
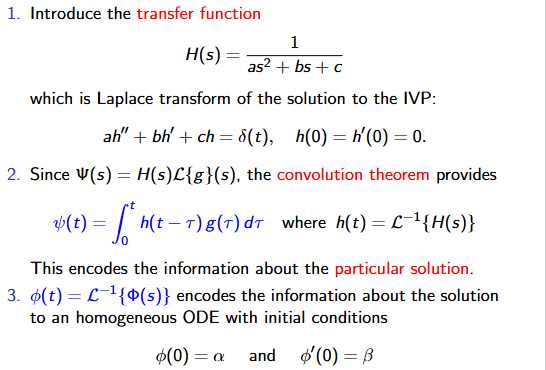
Laplace for non-homogenous ODEs
compute L{y} = Y(s) and L{f} = F(s)
use partial fraction decomposition
find inverse laplace transform using t-shift
L{f(t-c)uc(t)}(s) = e-scF(s)
Impulse
take integral(g) = I(τ) = 1 and lim(τ→0)dτ(t) = 0 for t≠0 where g(t) = dτ(t) = some function if -τ<t<τ and 0 otherwise
Dirac Delta function
If nice f(t) then the integral(δ(t-t0)f(t)dt = f(t0)
Laplace transform of dirac delta function

Convolution Theorem
Can use to compute inverse laplace by viewing P = FG

Convolution for non-homogeneous ODEs
Ca use for integral equations