Industrieroboter & Delta-Roboter
1/30
Earn XP
Description and Tags
Flashcards zum Thema Industrieroboter
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
31 Terms
Für eine Roboterpose gibt es meist wie viele Stellungen?
4
Greifer mit 2- oder 3-Fingern werden meist angetrieben durch
Pneumatische Antriebe
Ein Roboter mit einem 2-Fingergreifer soll ein zylinderförmiges Werkstück greifen. Dafür sind maximal wie viele Freiheitsgrade notwendig?
5 FG
Ein Roboter, der ohne Verfahr-Programm betrieben wird, ist ein:
Manipulator
Im PTP-Betrieb verfährt der Roboter mit RRR-Kinematik zur Zielposition:
Raumkurve
Soll der Roboter eine andere Aufgabe übernehmen muss der Roboter umprogrammiert werden und es sind auch Hardwareänderungen notwendig. Daher handelt es sich um folgendes Handhabungssystem:
Pick & Place
Ein Roboter mit TTT-Kinematik und 6 Freiheitgraden hat wie viele translatorische Achsen?
3 translatorische Achsen
Für einen Sauggreifer ist Vakuum zum Greifen notwendig. Dies kann mit einer Vakuumpumpe erzeugt werden. Welche Möglichkeiten gibt es aus Druckluft Vakuum zu erzeugen?
Venturi-Düse
Welches Programmierverfahren wird hauptsächlich bei Lackierrobotern verwendet?
Playback-Verfahren
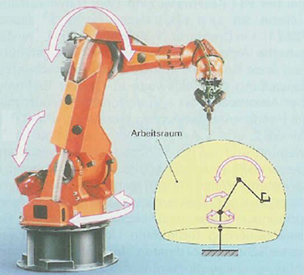
Ein Roboter mit folgender Kinematik und 6 Freiheitsgraden hat welche Achsen?
0 translatorische + 6 rotatorische Achsen
Die meisten Roboterachsen werden angetrieben durch:
Servomotoren
Ein Drehschwenktisch sollte verwendet werden, wenn der Roboter folgende Tätigkeit ausführt:
Schweißen
Die meisten Roboterachsen von Lackierrobotern werden angetrieben durch:
Hydraulische Antriebe
Ein Roboter mit einem Bohrer als Werkzeug soll in ein quaderförmiges Werkstück ein Loch bohren. Dafür sind maximal wie viele Freiheitsgrade notwendig?
5 FG
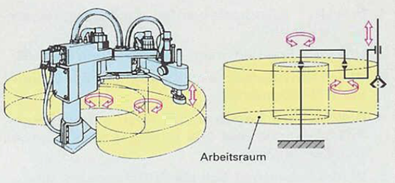
Ein Delta-Roboter hat eine:
Parallele Kinematik
Ein Roboter mit einem Saugreifer soll von einem horizontalen Fördrerband einen runden Teller greifen und stapeln. Dafür sind maximal wie viele Freiheitsgrade notwendig?
3 FG
Um eine breitere Schweißnaht zu erzeugen, setzt man folgende Funktion ein:
Pendeln
Besonders problematisch ist das Greifen von:
textilen Stoffen
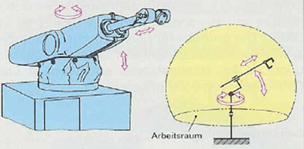
Ein Roboter mit folgender Kinematik und 6 Freiheitsgraden hat welche Achsen?
2 translatorische + 4 rotatorische Achsen
Ein Roboter mit folgender Kinematik und 4 Freiheitgraden hat welche Achsen?
1 translatorische + 3 rotatorische Achsen
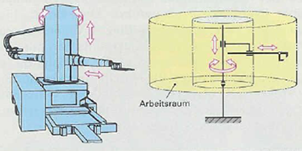
Ein Roboter mit folgender Kinematik und 6 Freiheitgraden hat welche Achsen?
1 translatorische + 5 rotatorische Achsen
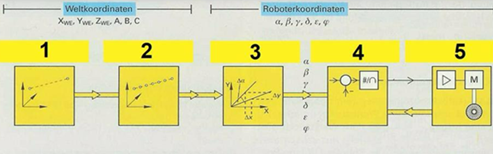
Ordne zu was für die Bewegungserzeugung der Reihe nach passieren muss:
Programmbefehl → Interpolation → Koordinatentransformation → 6x Lagerregelung → 6x Antriebssystem
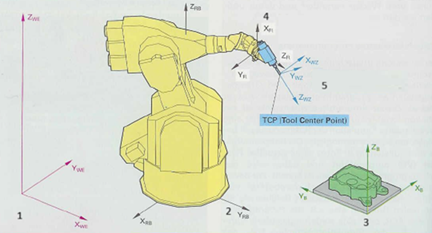
Welches Koordinatensystem ist die Nummer 1?
Weltkoordinatensystem
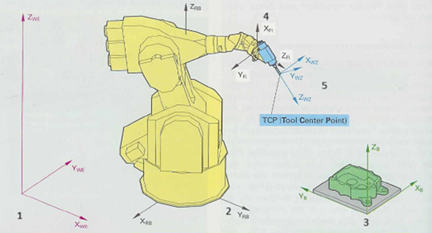
Welches Koordinatensystem ist die Nummer 3?
Werkstückbasiskoordinatensystem
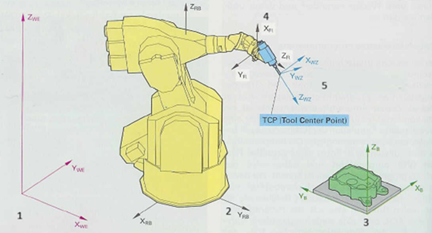
Welches Koordinatensystem ist die Nummer 2?
Roboterbasiskoordinatensystem
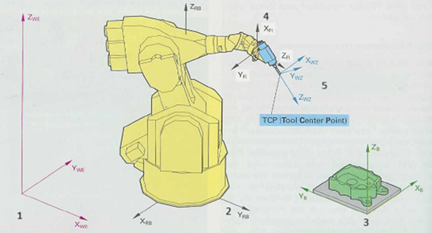
Welches Koordinatensystem ist die Nummer 4?
Flanschkoordinatensystem
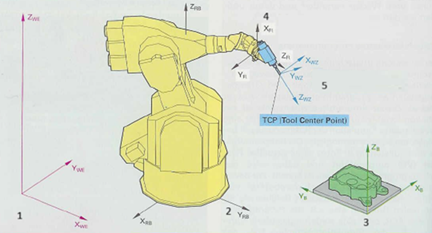
Welches Koordinatensystem ist die Nummer 5?
Werkzeugkoordinatensystem
In der Epsilon-0-Stellung rotieren welche Achsen gegenläufig?
Die 4. und 6. Achse
Wie lautet der Programmbefehl für eine PTP-Bewegung in einem FANUC Roboterprogramm
J
Für eine zirkulare Verfahrbewegung eines Roboters im R3 sind wie viele geteachte Punkte notwendig und wie viele müssen im Befehl angegeben werden?
3 Punkte notwendig/2 Punkte angegeben
Wie lautet der FANUC-Verfahrbefehl für eine lineare Bewegung des TCP im Raum?
L