Differential Equations Final Exam
1/16
Earn XP
Description and Tags
Final
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
17 Terms
linear Independence
y1 and y2 are linearly independent if the Wronkskian does not equal zero.
Fundamental Set of solutions
A collection of solutions to a differential equation that are linearly independent and can be used to express the general solution. Y1 and Y2 are known.
General Solutions
Contains all possible solutions
Repeated roots and Order Reduction 3 possibilities.
2nd order, linear, homogenous ODE w/ constant coefficients.
1) Two real and distinct roots
2) one real repeated root (usually multiply by t)
3) Two complex conjugate roots. (trig)
Repeated Root Theorem
If ODE has a characteristic eqn that has a repeated root (k), then general solution y=c1e^kt+c2te^kt
Order Reduction (not constant coefficients).
v(t)= integral(1/y1²*alpha)
Complex Roots
2nd order linear, homogenous, quadradic formular yield complex roots. z=alpha +i*beta (always come in conjugate pairs).
Gen Sol: y(t)=c1e^alpha*tcos(beta*t) +c2e^alpha*t sin(beta*t)
*real valued and continuous)
Non-Homogenous Eqns
1) solve Homogenous version to find y1 and y2
2) Find particular solution (undetermined coefficients, variation of parameters).
3) Write general solution to NH problem with yp
4) Use I.C to solve for c1 and C2
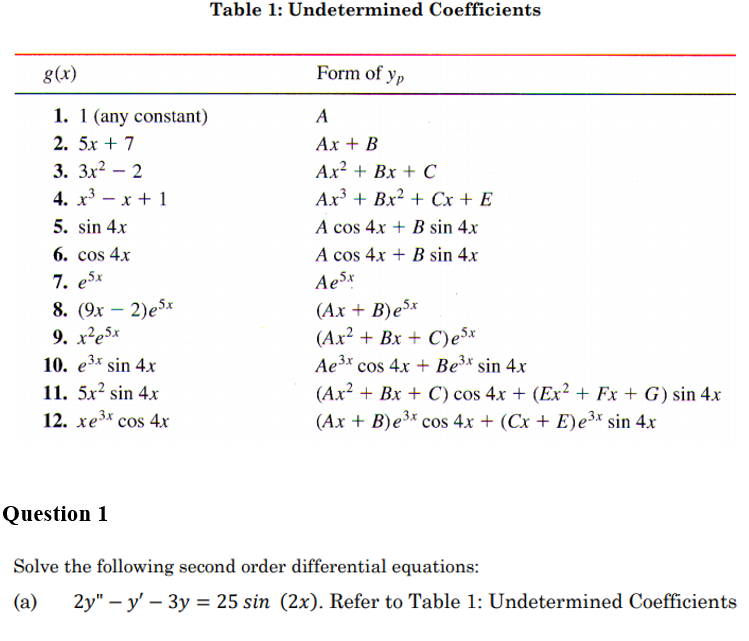
Undetermined Coefficients
Particular solution, by guessing.
ypt will be the product of all the guesses (does not wrk with quotients t^-1)
GUESS MUST BE LINEAR INDEPENDENT
If already apart of solution, multiply by t (order reduction) to ensure linear independence.
Variation of Parameters
Works for all particular solutions for all 2nd order linear non-homogenous ODES.
yp= u1y1+u2y2
u1= int(-y2*g/w)
u2=int(y1*g/w)
Mechanical systems and simple harmonic motion
2nd order linear ODE with constant Coefficients
mx”=dx’+kx=g(t)
x= horizontal displacement (dep variable)
t=time (ind.
m=mass
d= dampening factor
k= spring constant
Unforced vibrations with no dampening (simple)
mx”+kx=0
char eqn: typically complex roots, r=0±sqrt(k/m)=Beta
Yh(t)= c1cos(sqrt(k/m)*t)+c2sin(sqrt(k/m)*t))
x(t)=Acos(wo*t-theta)
A:Amplitude sqrt(c1²+c2²) (meters)
theta: phase shift tan=c2/c1 if negative, subtract or add by pi.
w0(t)=beta*t=sqrt(k/m)*t
T: period (2pi/sqrtk/m) 2pi/w0
Unforced Damped Vibrations
mx”+dx’+kx=0
Case 1: 2 distinct roots, both negative d²-rmk>0 (overdamped comes to rest over time)
case 2: Complex roots, d²-4mk<0, Underdamped, goes to rest after oscillations.
Case 3: d²-4mk=0, repeated root. Critically damped (system goes to rest the quickest)
Forces Vibrations
mx”+dx’+kx=g(t)
if d>0, Xht will have one of the forms underdamped, critically, or overdamped.
Xh(t) as limit goes to infinity will always go to zero. Any long term behavior will mi
d=0, xht is simple harmonic motion with natural frequency, as t goes to infinity will oscillate forever.
Forcing term is periodic
case 1: frequencies match! forcing term frequency matches natural frequency of system, (TRUE RENOSANCE!) oscillations will grow larger and larger in amplitude until system destroys itself
case 2: Frequencies are different, Beats! The system oscillates, but to a neat looking wave form. The more equal the frequencies, the more pronounced the beats will be.
Laplace Transform
k(s,t) kernal of tranform
F(t)=integral (e^-st*f(t))dt
Domain: what values as the limit converges.
TO be laplace must
1: f(t) is piece wise continuous (contains every point on interval [0,inf), with finite discontinuities).
2: of exponential order e^a*t, f(t)<Me^at, Find an alpha that makes this equal to zero. f(t)/e^at
Properties of Laplace
LT is a linear transformation (can have a constant multiplied in or out)
Use table of transformations
THM: LT of derivative, Ly’=sLy-y0
Transform Property: Le^alphat*f(t)=F(s-a) for s>a +alpha
Inverse Laplace Theorem
Very often need algebra for this: completing the square, partial fraction decomposition. If degree numerator> degree denom. perform polynomial long division.
THM: