Decision Trees
1/78
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
79 Terms
classification techniques
decision tree methods
nearest neighbor
neural networks
naive bayes
support vector machines
what is a decision tree?
classifier w tree structure
essentially a flowchart (each ex moves from root to leaf)
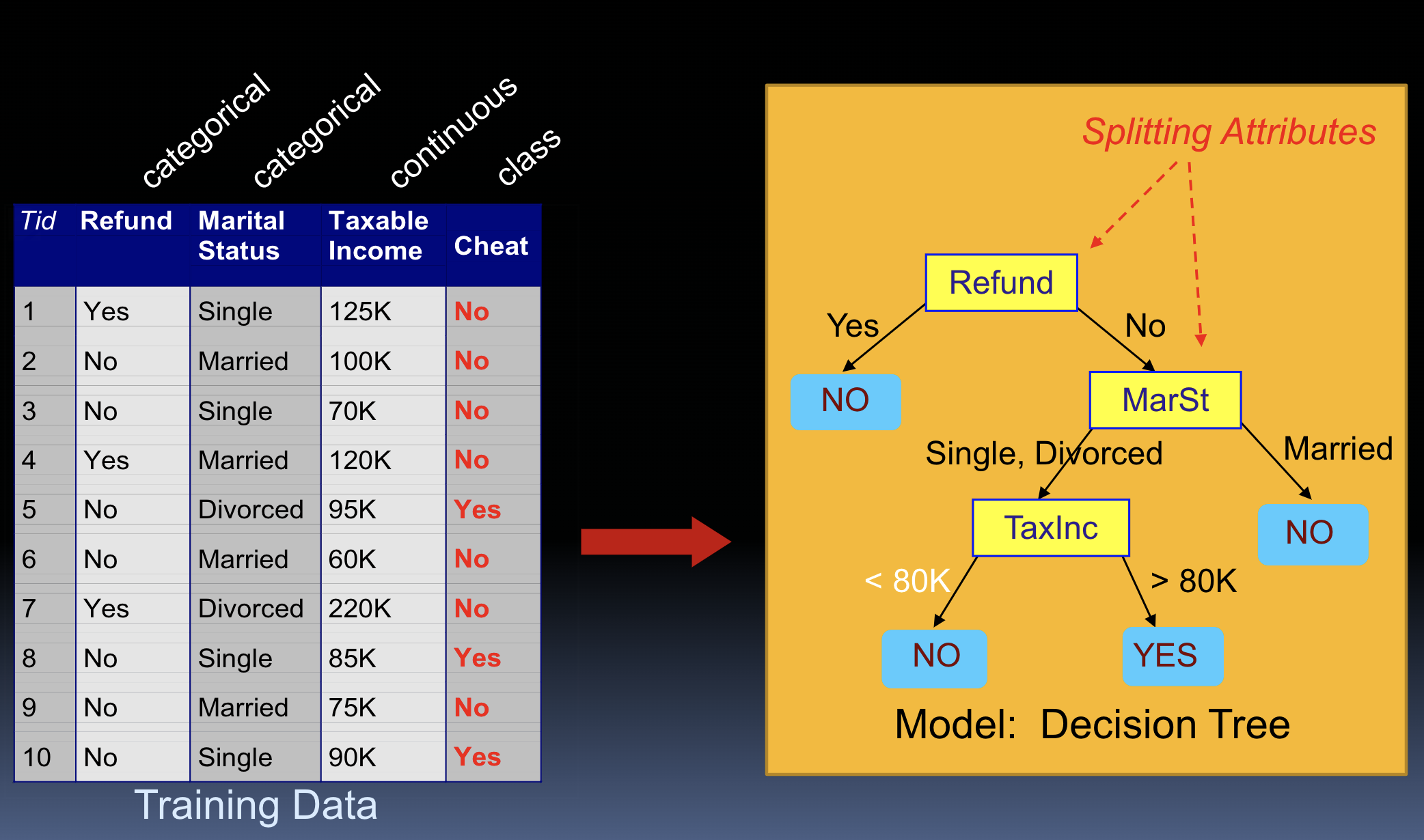
DT definitions
root node- start point
decision node- test on single attribute
leaf node- indicates value of class
path- disjunction of conditions to make final decision
2 phases of tree generation
tree construction
at start all training ex are at root
partition ex recursively based on attributes alg selects
tree pruning
improves performance on new examples
best tree on training data may not be best on new test data due to overfitting
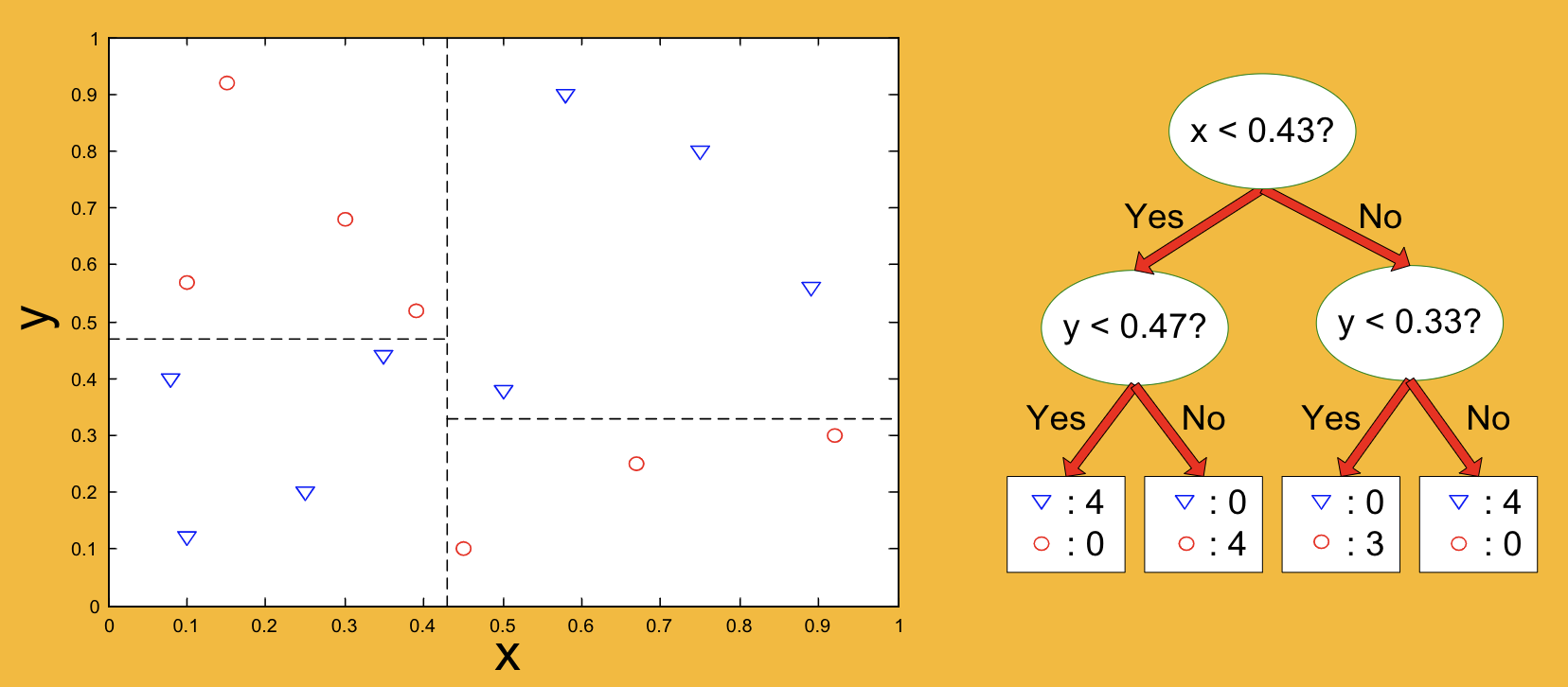
decision boundaries
-DTs form rectangular regions → each region is a leaf
-border b/n regions = decision boundary
-decision boundary = axis parallel
expressiveness
flexibility of the classifier in forming decision boundaries
linear models- form boundaries w 1 line/plane
DTs- form rectangular regions
are linear models or DTs more expressive?
DTs- form many regions
but can only form axis parallel and linear can form 1 angled linear boundary
so depends on model which is more appropriate
downside to flexibility?
can lead to more overfitting
when are DTs good?
strong interactions b/n many features (accurate modeling=must have complete trees)
when are DTs bad?
target class based on continous funcs that involve 2 variables (unless simple)
DT learning concept x<y
-not good → cannot learn perfectly unless tree has infinite # leaves
-can only approximate w many small rectangles
tree construction
top-down recursive; divide and conquer
start w all training ex at root
partitioned recursively based on selected attribute
best attr selected using a metric
recursive process
partition ex at root based on ‘best’ feat
if binary split recurse on right then left child, etc
tree building is
greedy
each decision = locally optimal (not globally)
1-level lookahead
heuristic methods = for difficult problems
benefit to greedy heuristic = fast
splitting on categorical attributes
multi-way split- split on every value
binary split- divides into 2 subsets
splitting on continous attributes
partition dynamically into ordinal values using equal freq or width
binary split- (A<v) or (A>=v); sort #s and try each split b.n successive #s
when does tree construction/partitioning/splitting stop?
all samples at a node belong to same class
no remaining attributes to split on (majority voting used to assign class)
no ex left
stop when not beneficial to split (basic method ignores and handles w pruning but pre-pruning does this)
picking locally optimal split
hunt’s alg- recursively partition training records into successively purer subsets
pure(homogeneous) set f all ex belong to same class
there are levels of purity

which split is best ex.
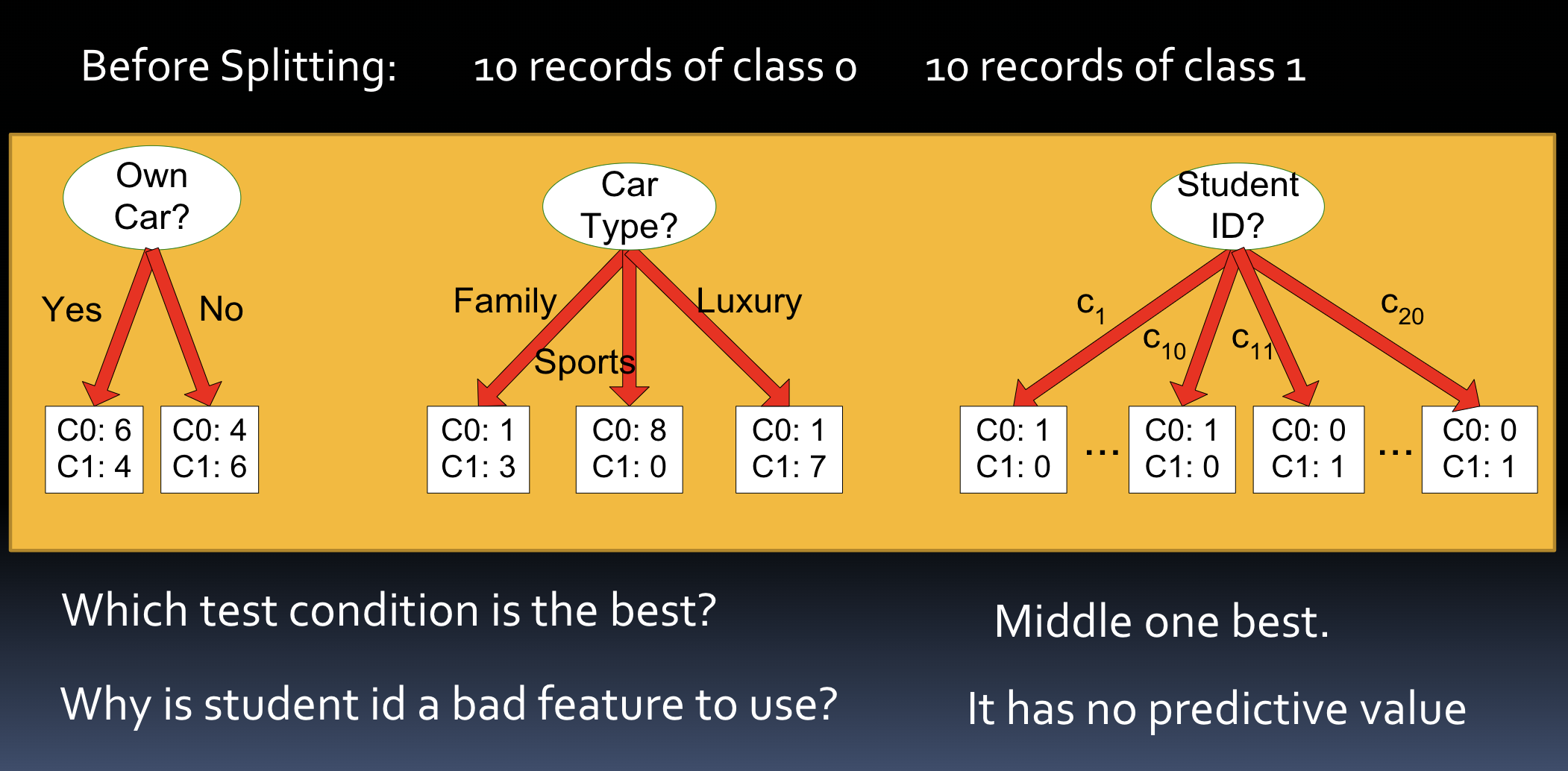
purity is measured using
statistical metric
entropy
gini
classification error rate
avail DT algs
hunt’s alg (one of earliest)
CART (classification and regression trees)
regression tree- can predict numerical value so not just a classifier
sklearn
ID3, C4.5 (pretty old)
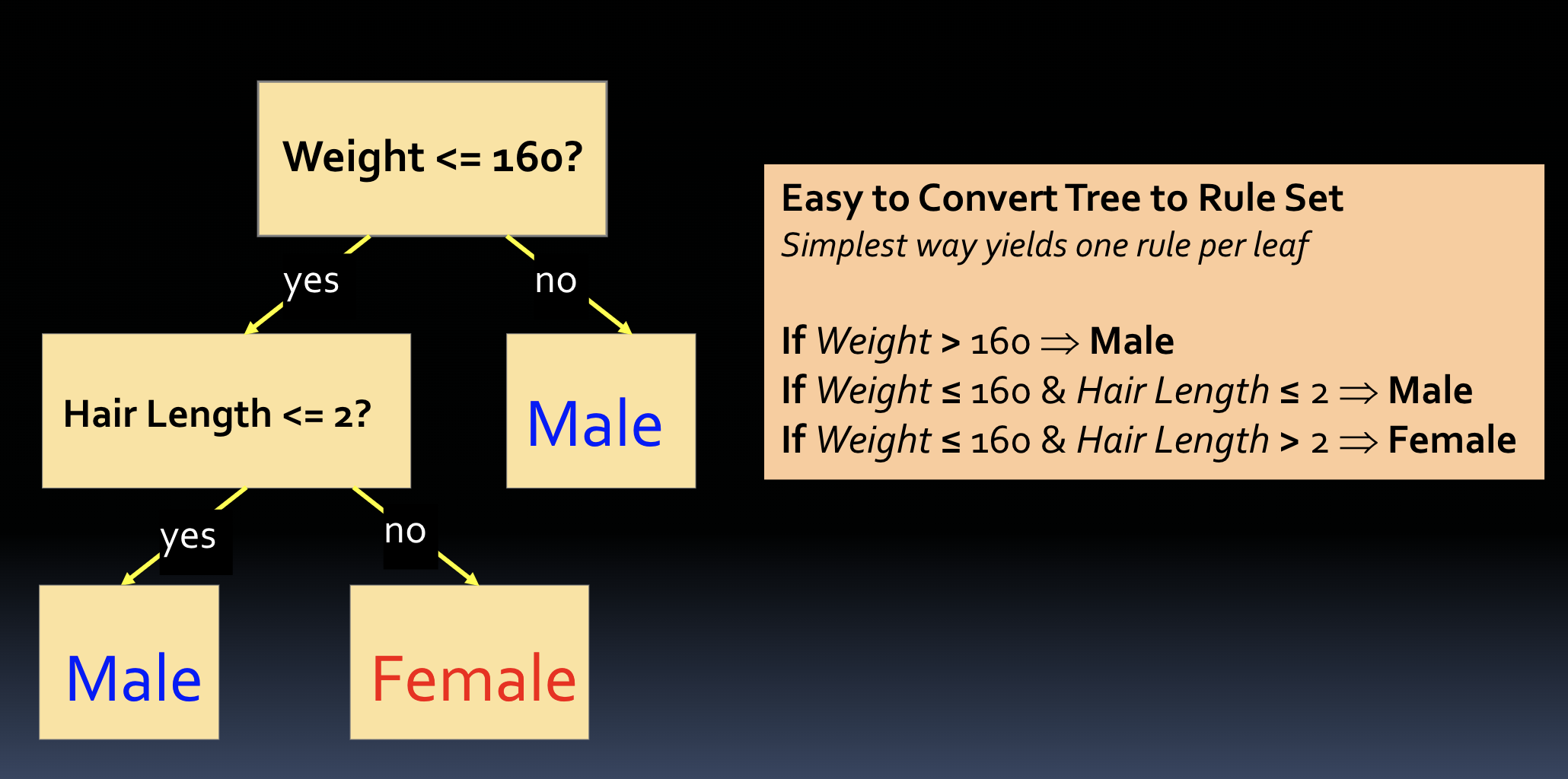
converting DT to rules
1 rule = per leaf
DT algs in practice
-Weka = free open source java DM suite
-Python Scikit includes DT alg = based on CART; doesnt handle categorical data so need to convert to #s
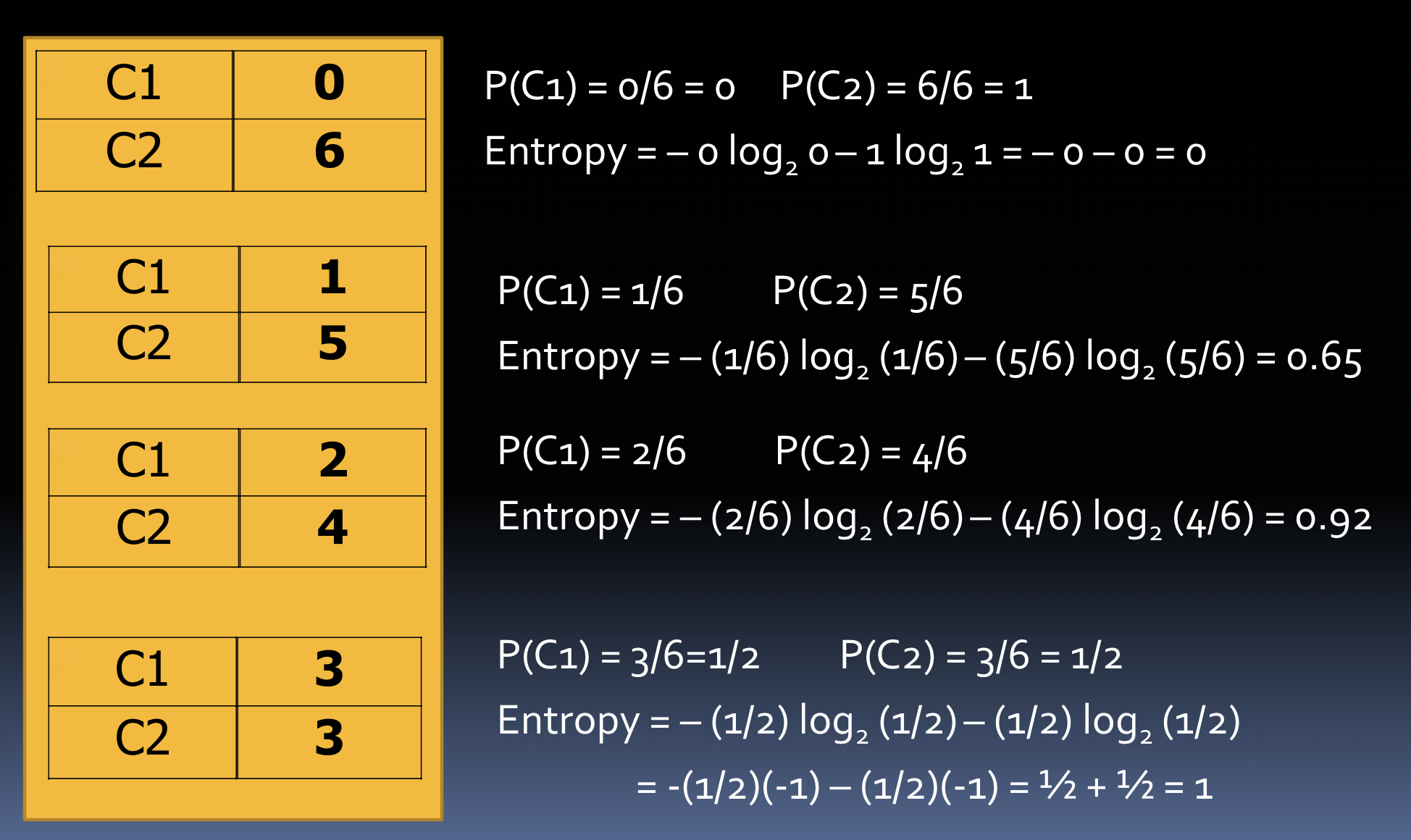
entropy
-measures impurity/randomness of set of examples
-range from 0 (least random) to 1 (most)
-want close to 0 in classification
entropy is 0 if outcome is
certain
entropy is maximum if
we have no knowledge of system ( / any outcome is equally possible)
we want entropy to be
low → more orderly
entropy to select feature
-entropy defined on a sample (entire training set aka root or sample aka one leaf)
-consider entropy after DT split to identify best feature to split on (c samples for a c-way split)
-use information gain that measures reduction in entropy → split on feature w max info gain
information gain
entropy of parent - entropy of children
k-way split → k child nodes
sum child entropies weighted by relative freq (weighted avg)

log2x calculations
log2x = log10x/ log102
log2x=log10x/.301
GINI index
-node t with c splits
-like entropy (lower=better)
-split on feature w lowest GINI after split
-compute weighted GINI avg of childnre
-0 is best, 0.5 is worst

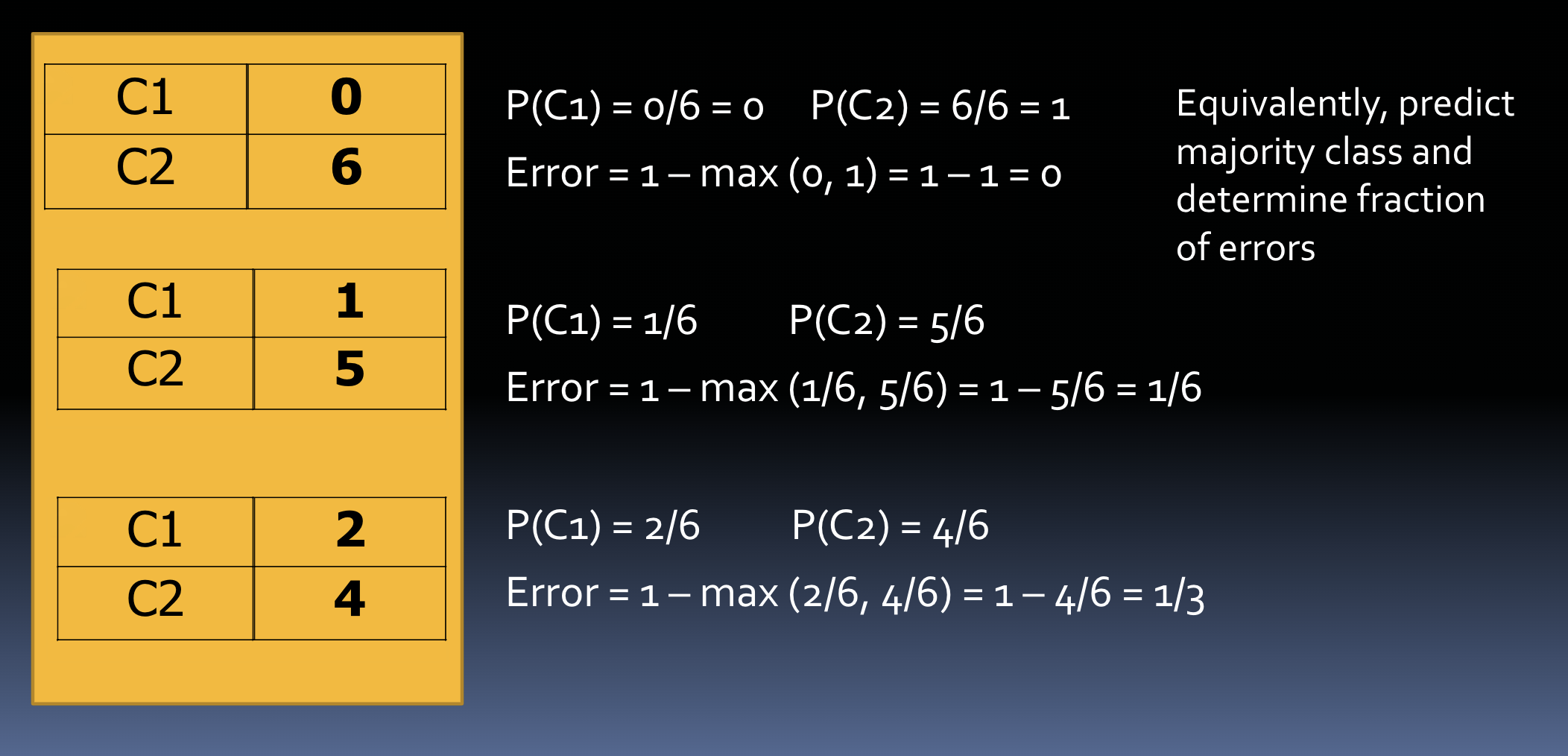
classification error rate
-at a node t
-classify node based on most freq value, count errors, and divide by # of ex
-measures misclassification error made by a node
for binary- 0 (best), 0.5 (worst)
for k splits- 0 (best), 1-1/k (worst)
5 splits = 0.8 error rate
-must compute error rate of children after split
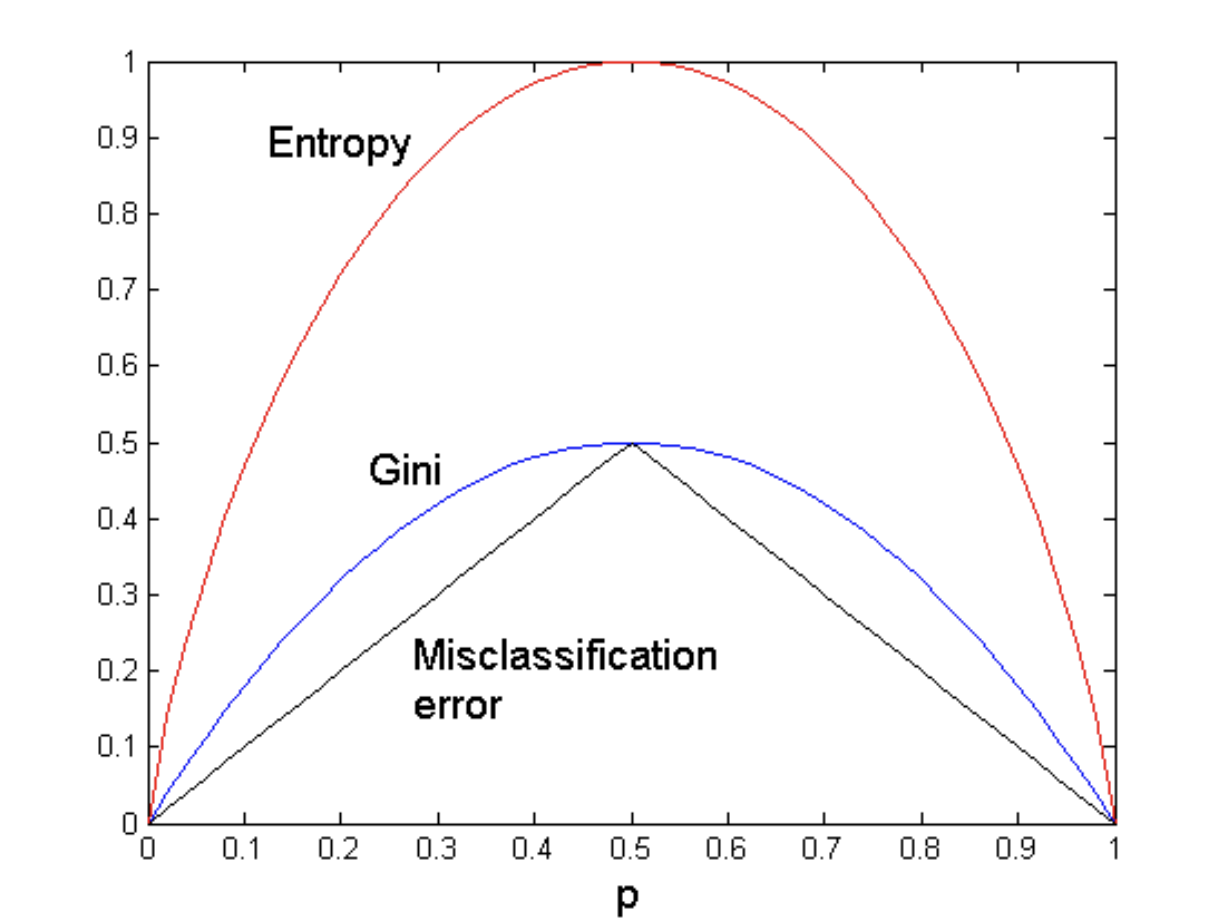
splitting metric comparison
comparison for 2 class problem as probability p of one class varies
error rate often used to evaluate results, but never for
selecting features
DT use a greedy strat to we need to use splitting metric for globally better results
occam’s razor
-among competing hypotheses → one with fewest assumptions should be selected
-complex models = greater chance it was fitted accidentally by errors in data (consider complexity when eval model)
errors
training errors- errors on training set
test errors- errors on test set
generalization errors- expected error of model over random selection of ex from same distribution (measured using test set)
model overfitting occurs when
model too complex
may minimize training errors at expense of more test set/generalization errors
difficult to predict when this will occur
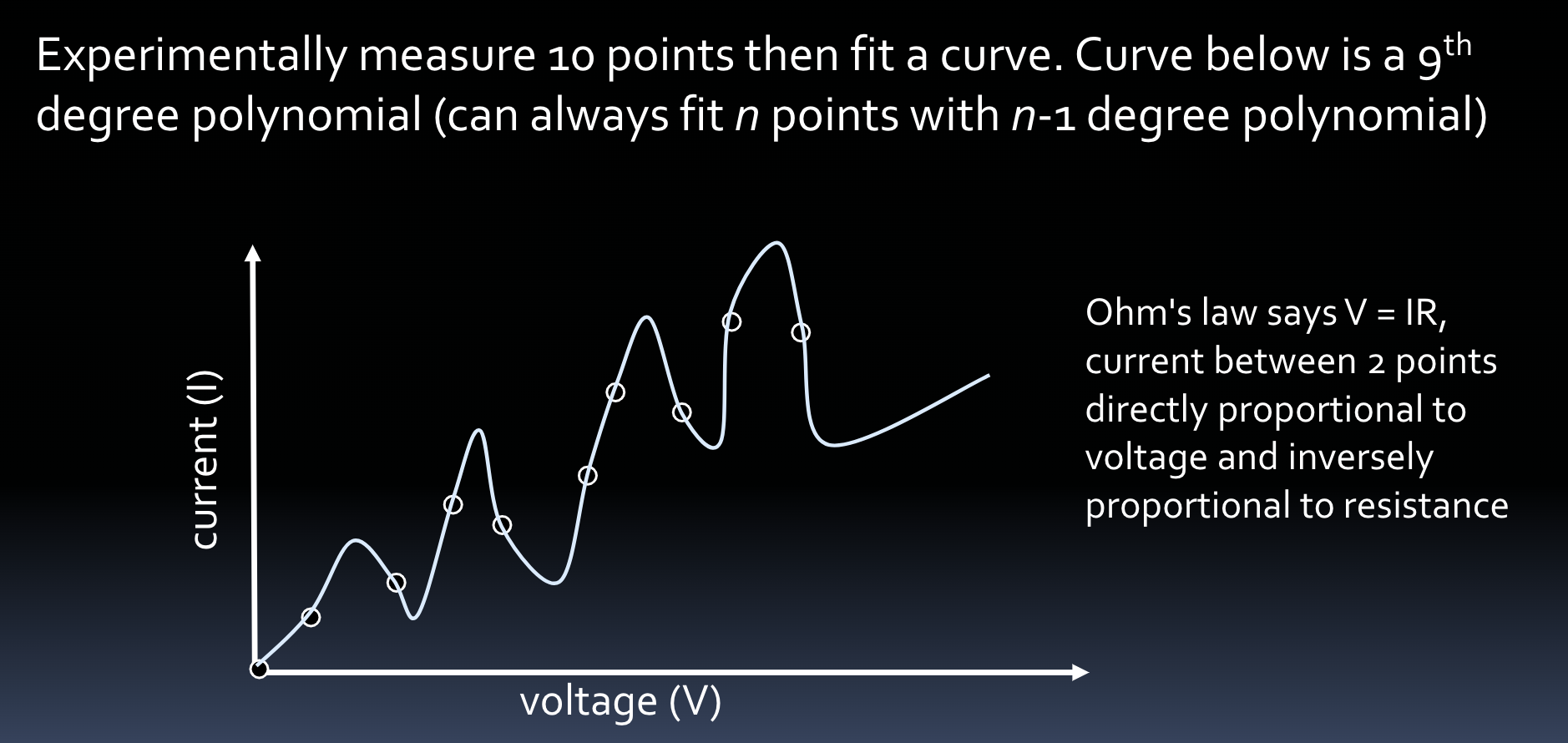
overfitting ex) Ohm’s law
says V=IR (current b/n 2 points=directly proportional to voltage and inversely proportional to resistance)
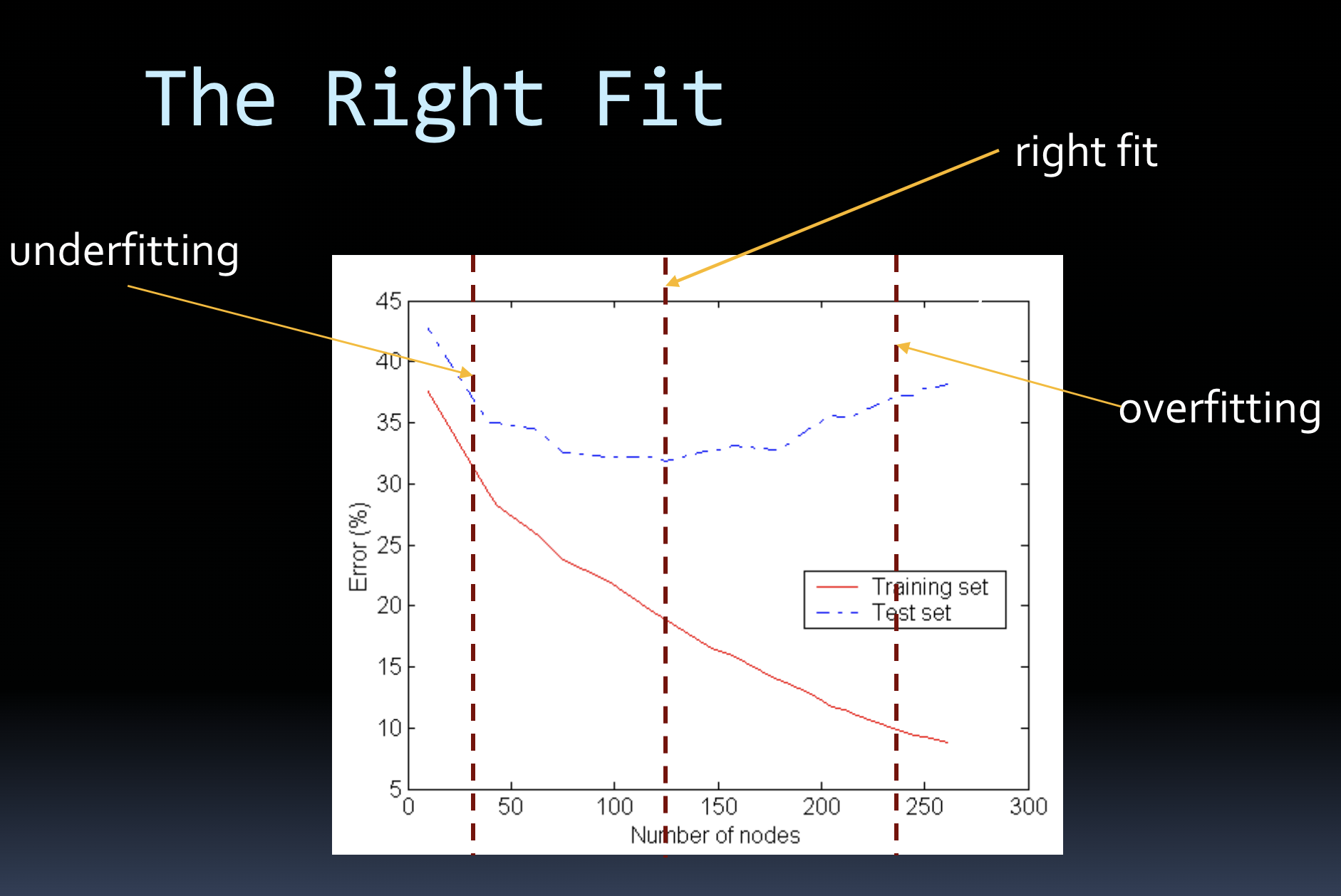
underfitting
model is too simple → training and test errors large
overfitting
model is too complex → training error low but test error high
good for training error
the right fit
in figure- best generalization performance around 130 nodes (test set error rate=lowest)
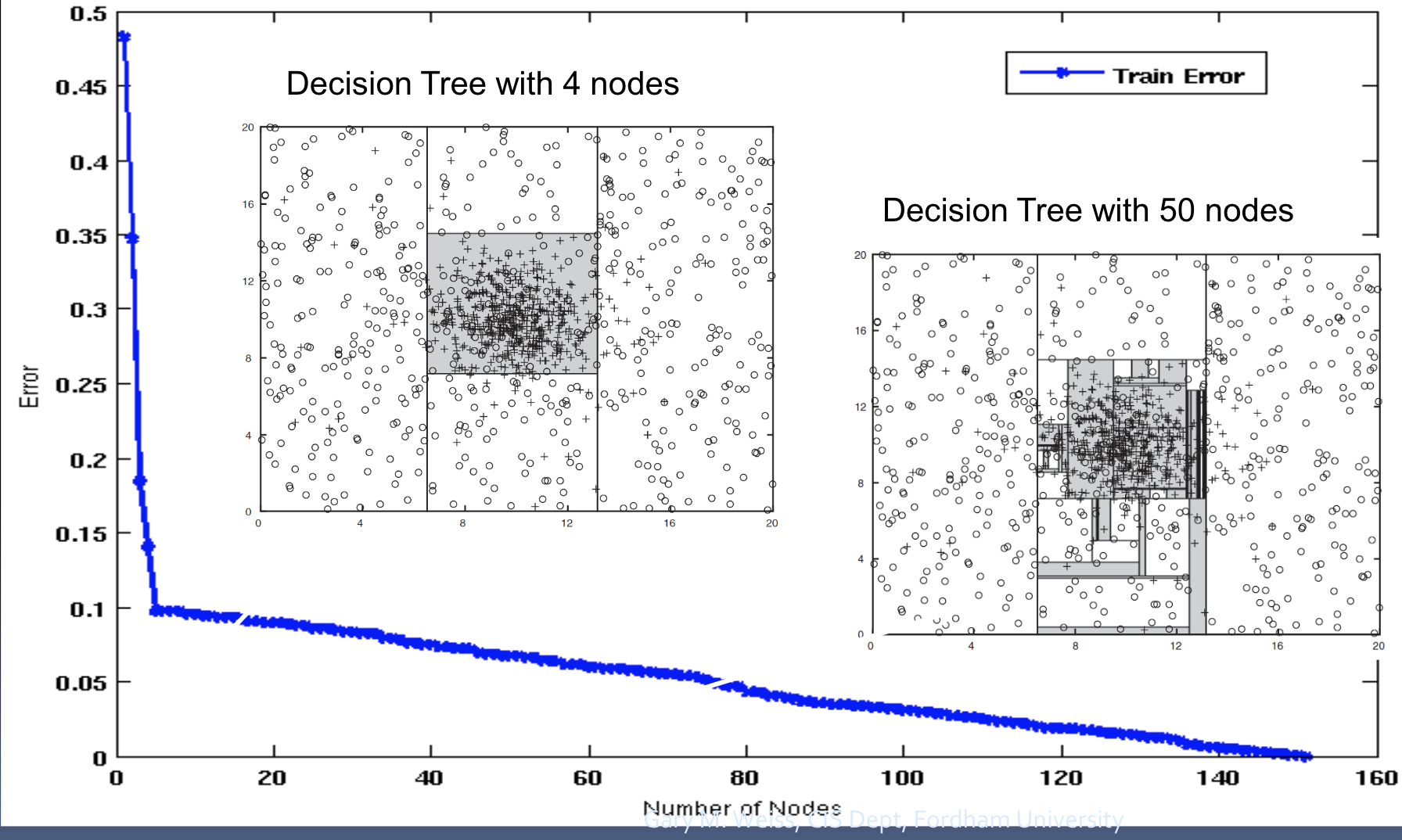
a synthetic data set
a data set artificially generated for which we know the correct underlying concept
if condition met → class +
if not → class -
data set defined using gaussian distribution
determine which tree is better
look at generalization (test set) error
in ex) 50 nodes cover many areas outside gaussian region and covers noise → 4 nodes prob better
if you have more training examples to learn from you have more
data → more complex model
inc amt of training data allows
DT to identify new regions of concept to be learned (more complex model can be okay)
what will generally happen to test set performance w more training data?
improves → more data=good
more data leads to more complex (usually better) models,
but not overfitting
overfitting avoidance strategies
pre-pruning- avoid overfitting in tree building process
difficult, rarely used
post-pruning- allow tree to overfit data then prune it back
common
pre-pruning strategies
-early stopping criteria
if class distribution is independent of avail features
if splitting node does. not improve purity (use info gain / gini)
assign penalty for model complexity and stop when benefit does not outweigh penalty
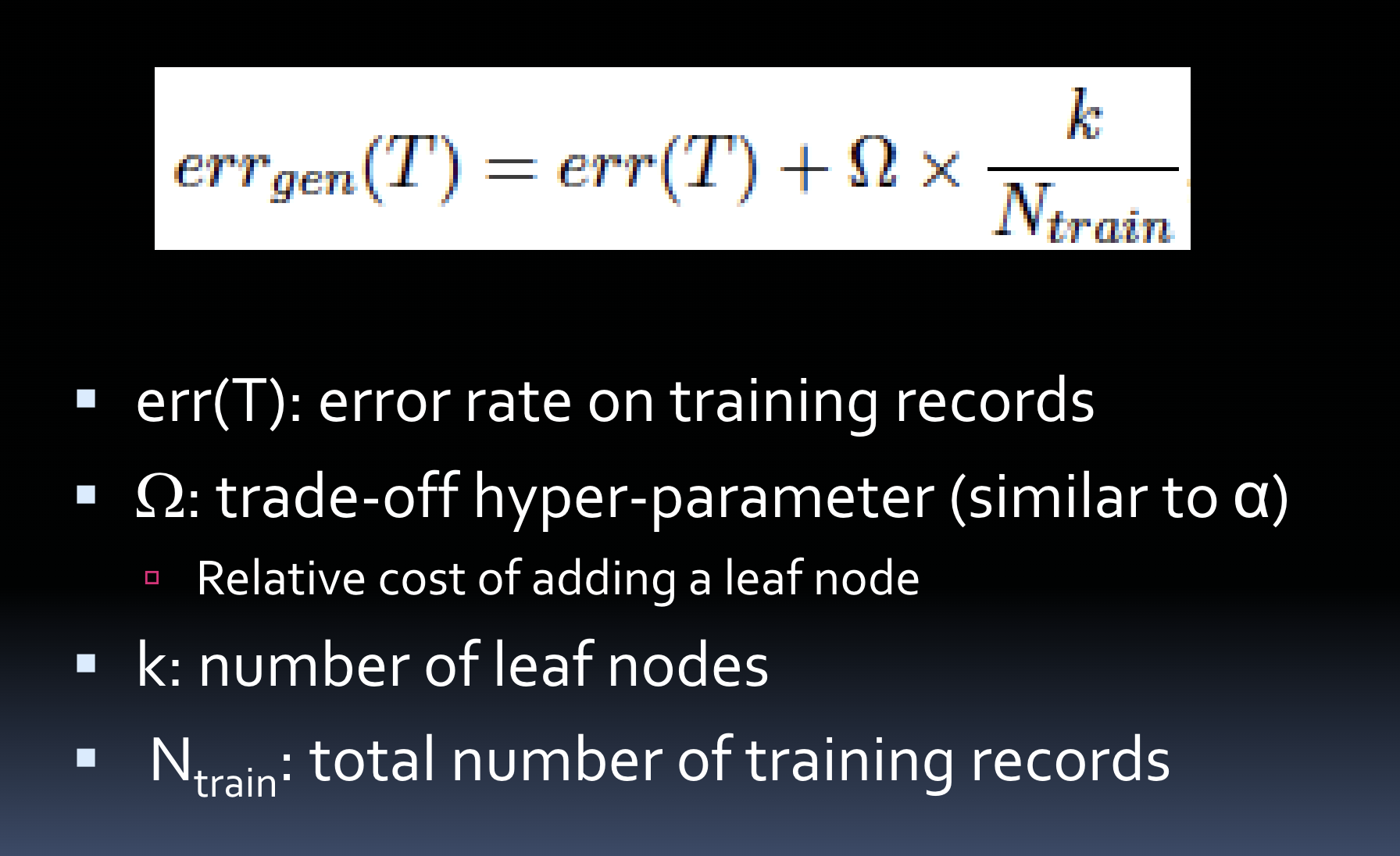
pre-pruning with complexity estimate
generalization error(model) = training error(model) + a x complexity(model
training error(model)=optimistic
reasonably the best to hope for on test set
error rate will be higher
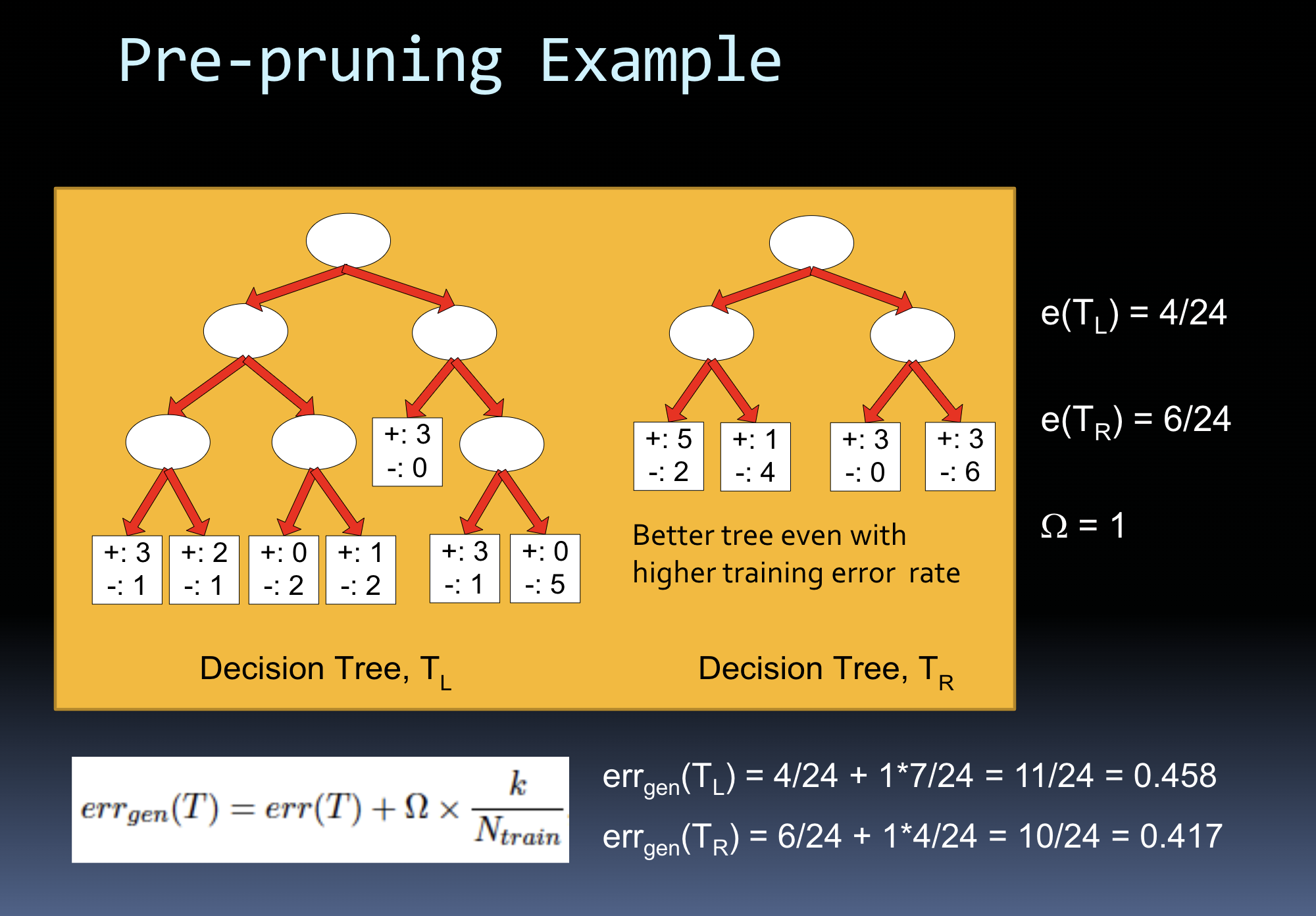
pessimistic error estimate
generalization error rate
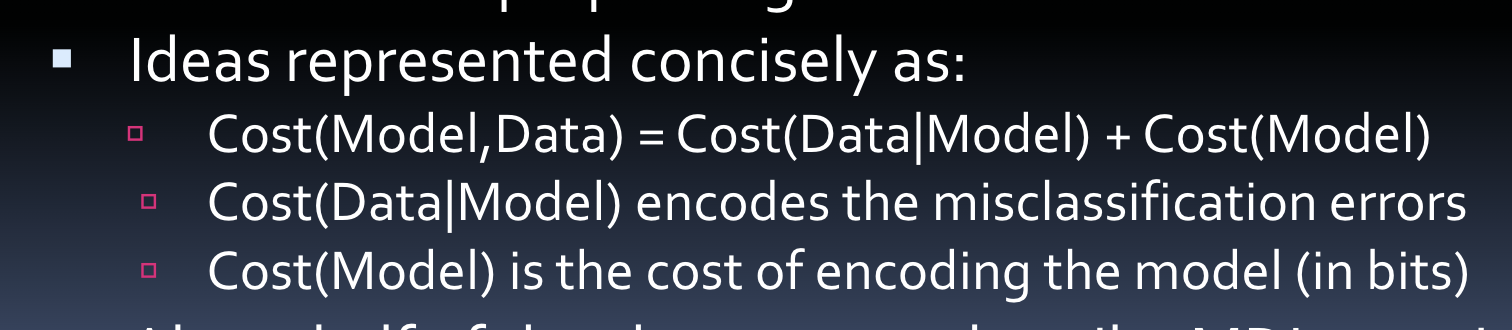
minimum description length (MDL)
-imagine u need to transmit dataset; options:
send entire data set
send complex model with no/few errors
send simpler model and misclassified ex
-best option=requires fewest bits=MDL
-tradeoff b/n complexity and errors = less arbitrary than for prepruning
post-pruning
-grow DT w few limits and then trim in bottom-up fashion
reduced error pruning- replace subtree w leaf node if generalization error will improve (improvement assessed w validation set thats separate from training/test sets)
disadvantage- less data
-alternatively use MDL / statistic estimates to decide whether to simplify
classifier performance
how constructed classifier performs at classifying new examples
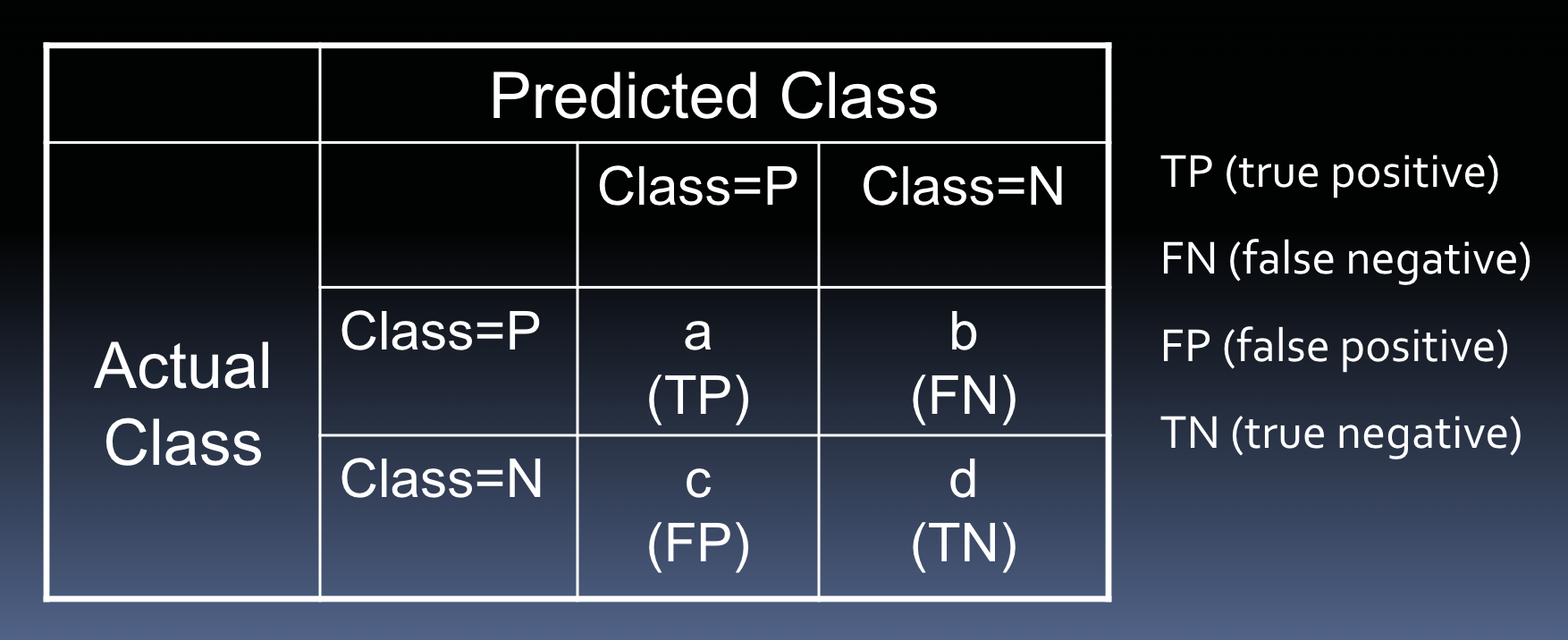
confusion matrix
-provides detailed results
-can be used to generate many metrics
-for k class problem → k x k matrix
accuracy and error rate
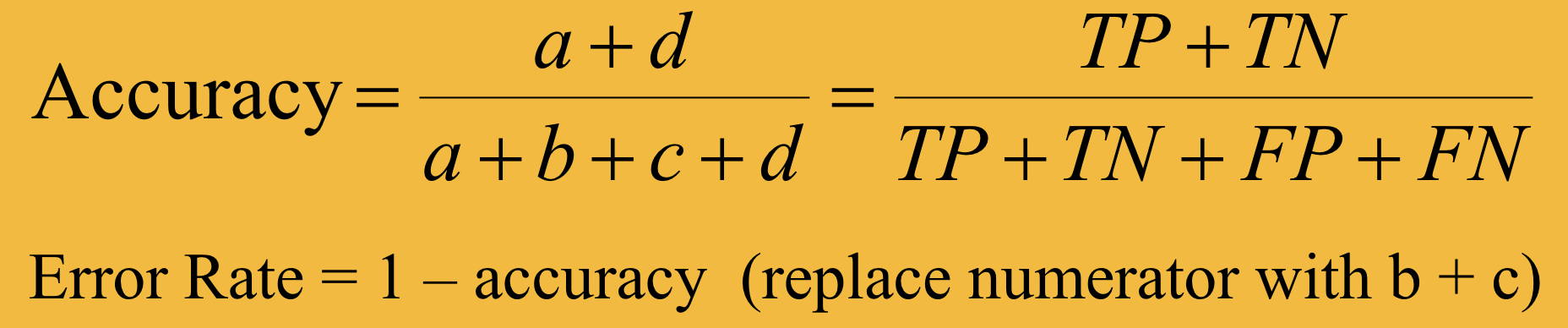
accuracy not that useful when
classes = imbalanced
ie. 9990 neg class examples and 10 pos → if model always predicts neg, accuracy is 9990/1000=99.9%
minority class often more important because
costs more to misclassify minority (positive)
ie. medical diagnosis- FN worse than FP
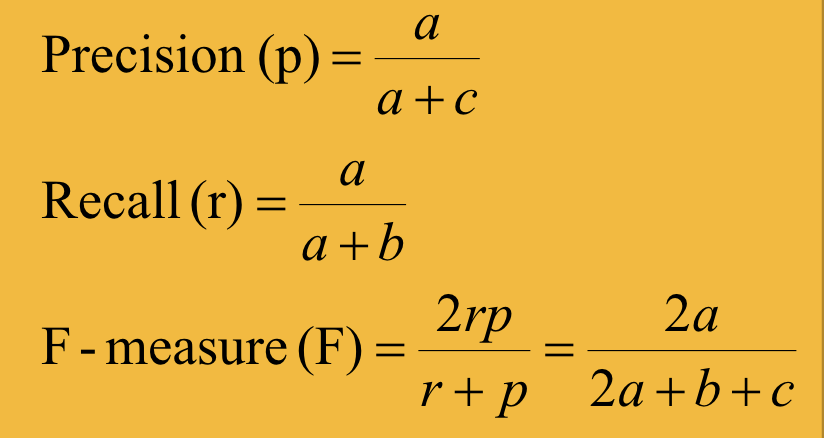
precision, recall, f-measure
-useful when class imbalance
-precision- accuracy when predict pos
-recall- fraction of pos you ‘catch’ (predict right)
-pos class = primary interest
-tradeoff b/n precision and recall
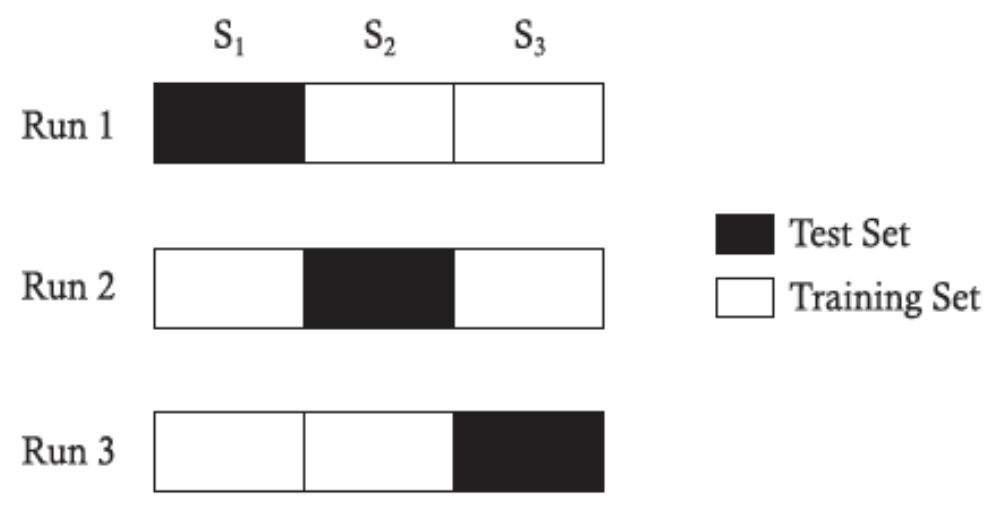
cross validation (xVal)
-partition data into k disjoint subsets
-train on k-1 partitions, test on remaining 1
iterate k times so every ex is 1 of test sets
-most common is 10 fold xVal
-3-fold xVal in ex) 3 iterations, 2/3 train, 1/3 test each iteration; report performance over all k(3) runs
leave-one-out xVal
if n labeled ex, perform n-fold xVal
ie. if 1000 ex then use 1000 iterations each with 999 training and 1 test ex
why use xVal?
better use of data for training the model
uses more data for training → more accurate
tests on every ex → more reliable
multiple estimates = better reliability
individual estimates form a distribution
can use distributions to determine if 1 model better than another (t-test)
xVal disadvantage
extra computation
why do you need a validation set?
-training and test sets = not always sufficient
-problem when generating many models → parameter tuning / diff algs
model w best test set performance may not be best because- only an estimate, small diffs may be due to chance → multiple comparisons problem
multiple comparisons problem
-random guessing → expect atleast 1 analyst to get results much better than random
-using test data to choose model instead of to build it
fixing multiple comparisons
use another data set to pick ‘best model’ → validation set (just like another test set but only used to pick best model)
using validation set process
-build multiple models w training data
-use validation set to decide best
-evaluate best model on test set and report
hyper-parameters
parameters that control the classification alg
ie. for DTs- splitting criteria, max depth, etc
validation set needed to choose
hyperparameter values
xVal can handle 3 partitions
-split data to training and test sets
-training set forms training and validation sets → build multiple models and pick best parameter
-choose model w best and evaluate test set
expressiveness
relates to flexibility and complexity of decision boundaries
for DTs all boundaries are axi-parallel which
somewhat limits expressive power
most other classifiers more expressive (exception- linear classifier normally limited to 1 line/plane but not limited to axis parallel)
😔
computational efficiency
time to build DT
exponentially large search space → greedy heuristics allow quick construction
pruning = more time than build but still quick
time to classify a test ex
given a model → ex classified very quick
modest # of comparisons (most trees less than 10 levels)
-overall DTs very fast to build + apply
😄
explainability and comprehensibility
DTs very explainable
can explain/justify individual classifications (follow path to lead and examine splits)
DTs generate comprehensible global model
overview of entire model and how it works
diff from justifying individual decisions (nearest neighbor is explainable but no global model)
😄
applicability
no prior assumptions about data → no need to apply transformations to features 😄
handles discrete/continuous features → not ideal if many continuous features 😄
can natively handle >2 classes (multiclass) → linear regression and SVM natively handle 2 😄
doesn’t normally handle regression tasks → variants like CART via regression trees; an idea is to avg numerical class values at a leaf 😔
feature issues
handling missing feature values
not required to impute missing value to func
can treat missing values as special value → diff from numerical methods that build global func that requires each feature to have value
handling irrelevant/redundant features
good at this bc feature selection methods
irrelevance- ignored
redundancy- only 1 used in path to leaf
other methods like nearest neighbor have big problems
😁
data fragmentation
# of ex smaller as go down tree
at some point=too few to make statistically valid decision
worse when more features, fewer ex
not all methods susceptible to this (methods that dont use divide and conquer)- linear regression only uses 1 line so divides once
😔
data fragmentation problem happens since
keep partitioning data in DT
deterministic vs probabilistic classifiers
probabilistic- produces a probability for each possible class (sums to 1.0)
DTs are deterministic but produce probabilities as side effect (ratio of classes at leaf)
global vs local model
global- fits a single model to entire dataset
less susceptible to overfitting
linear classifiers considered global
local- partitions input space into smaller regions and fits a model to ex in each region
DTs considered local