AP Physics C: Mechanics Leftovers
1/42
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
43 Terms
Moments of Inertia
For an object orbiting around a center:
Moment of Inertia is: I = mR2
Most 3D Shapes:
dm / M = dv / V (mass over volume) (density)
dm = ( M / V ) dv
Most 2D Shapes:
dm / M = dA / A (mass over area)
dm = ( M / A ) dA
Rigid Rod:
dm / M = dl / L (mass over length)
dm = ( M / L ) dl
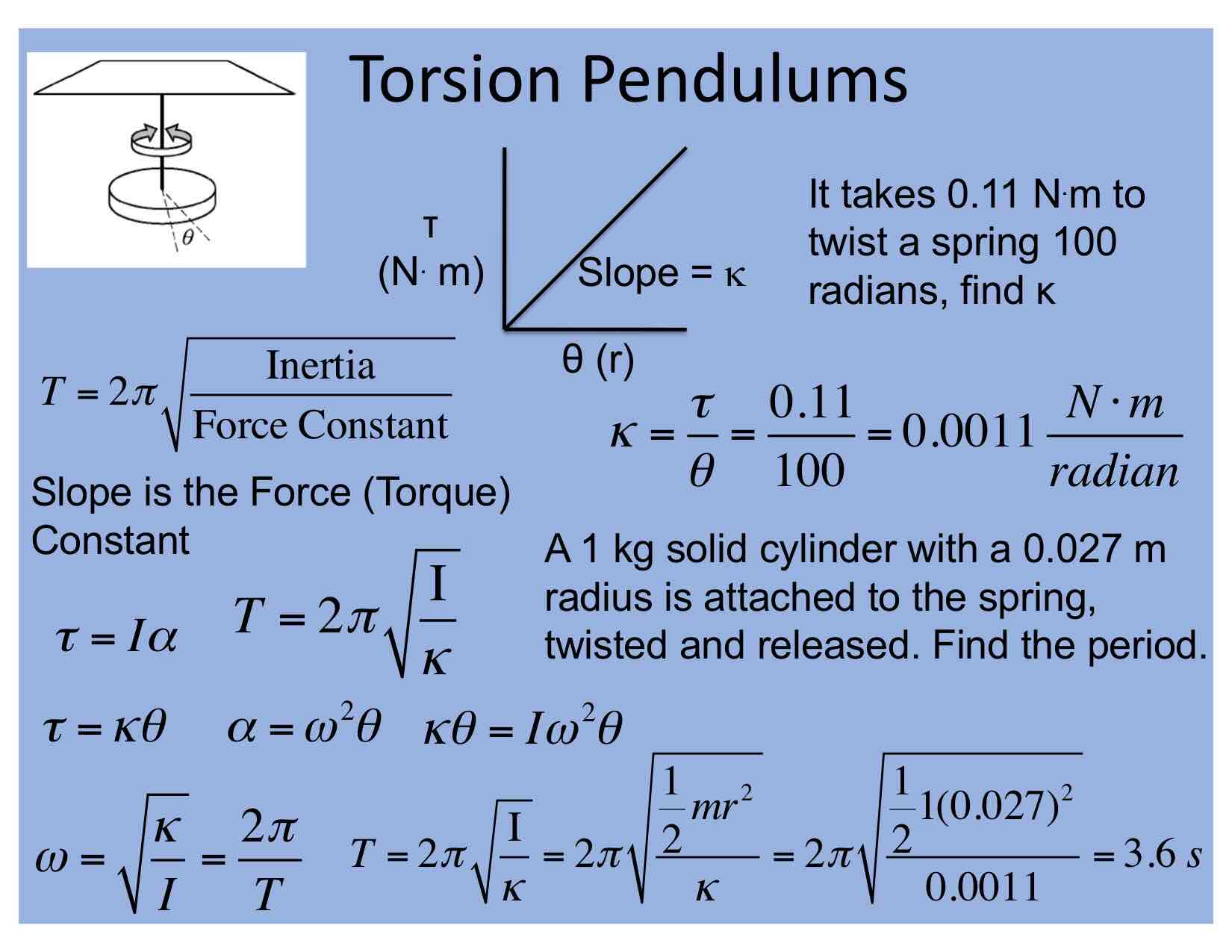
Torsion Pendulum
Vertical Circular Motion
 At the top of the circle:
At the top of the circle:
Fc = Fg + T
At the bottom of the circle:
Fc = T - Fg
Center of Mass
 * you can do center of velocity (it’s the same thing) (REMEMBER DIRECTION)
* you can do center of velocity (it’s the same thing) (REMEMBER DIRECTION)
Person Standing on an Elevator (Scale Reading)
Potential Energy
When graph looks like sinx or cosx:
object’s position will oscillate because KE changes from positive to negative
this means that the object will move forward, then turn around, move back, turn back around, and continue this process
Work
Net Work is 0 when force is CONSTANT
Work is the negative of U
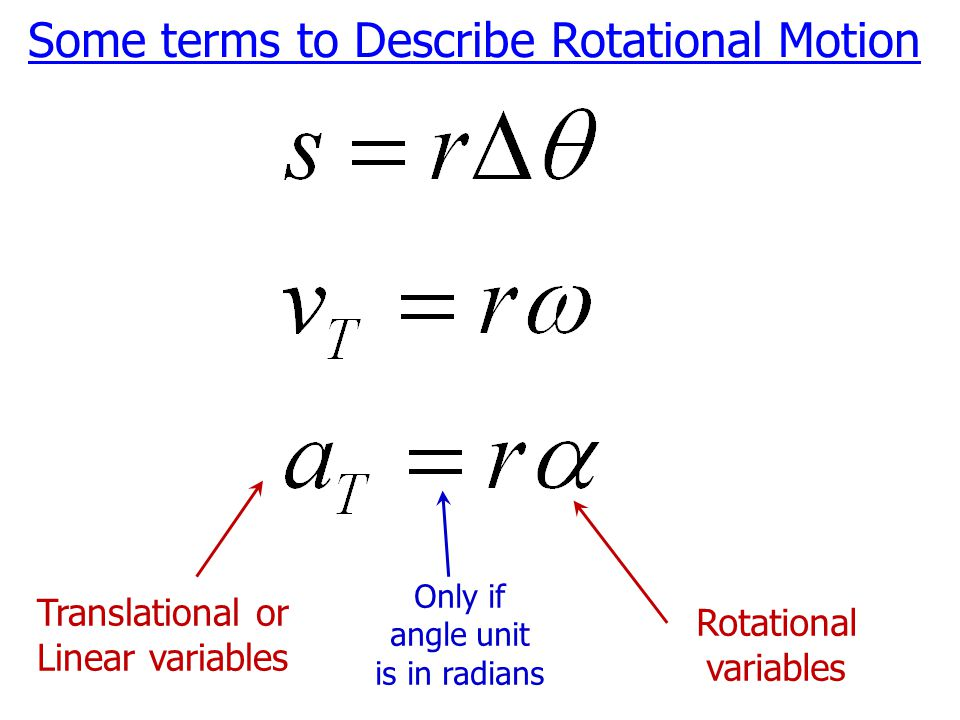
Acceleration in Rotation Kinematics
Not constant because there is a pulley that rotates, making various angles all while the mass rises and falls
Normal Force
Always away from the surface
Spring + Tension
Net torque = Torque of Spring - Torque of Tension
Angular Problems
Angle of a Pulley
means arclength
use bridge equation
USE TORQUE WHEN ANGULAR
Possible Errors
Anything that is assumed:
masses
whether friction is negligible or not
Free Body Diagram (Centripetal)
Centripetal -
should never be drawn in free body diagram
should use Tension and Gravity to depict Centripetal
When there is centripetal
Force is NET INWARD (INWARD force is greater) Fc = Fin - Fout
Tension & Contact Force
Contact Force
Force in the opposite direction of the acceleration of the system
Usually denoted by F2,1
Steps:
find acceleration of the system based on given force and mass values
multiply the acceleration of the system by the force MAKING the contact force (in the case above, F2)
Shortcut:
F2,1 = [ m2 / (m1 + m2) ] * FA
If there are more masses, just divide by total mass
Tension
directed away from ‘gravity’
Series of Springs → Series of Strings
Series of springs can be seen as a series of strings when doing a problem
the Tension from the Strings is EQUAL to the Force of the Spring from the Springs
Period of a Spring (T)
Period (T) can be split up into components of max compression, equilibrium, and max stretch because the spring oscillates
Ttotal = Tmax compression + Tequilibrium + Tmax stretch + Tequilibrium
When solving for T of one part just do (1/4)Ttotal
Use it on the period for mass spring mechanisms
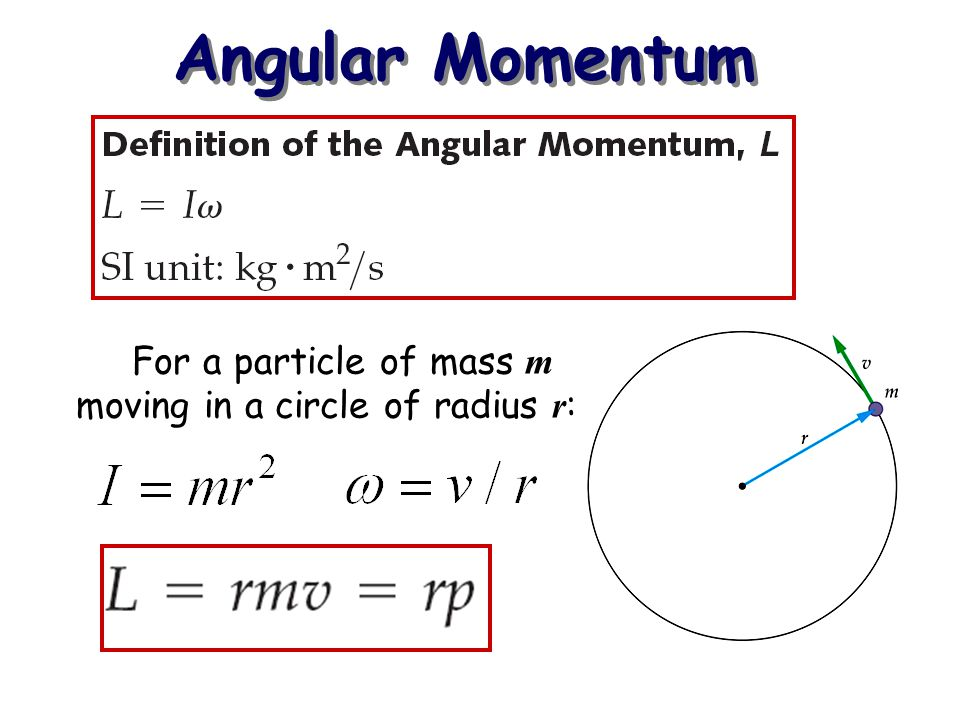
Angular Momentum
Conservation of Energy
For All Oscillating Systems
Kmax occurs at equilibrium
Umax occurs at end point
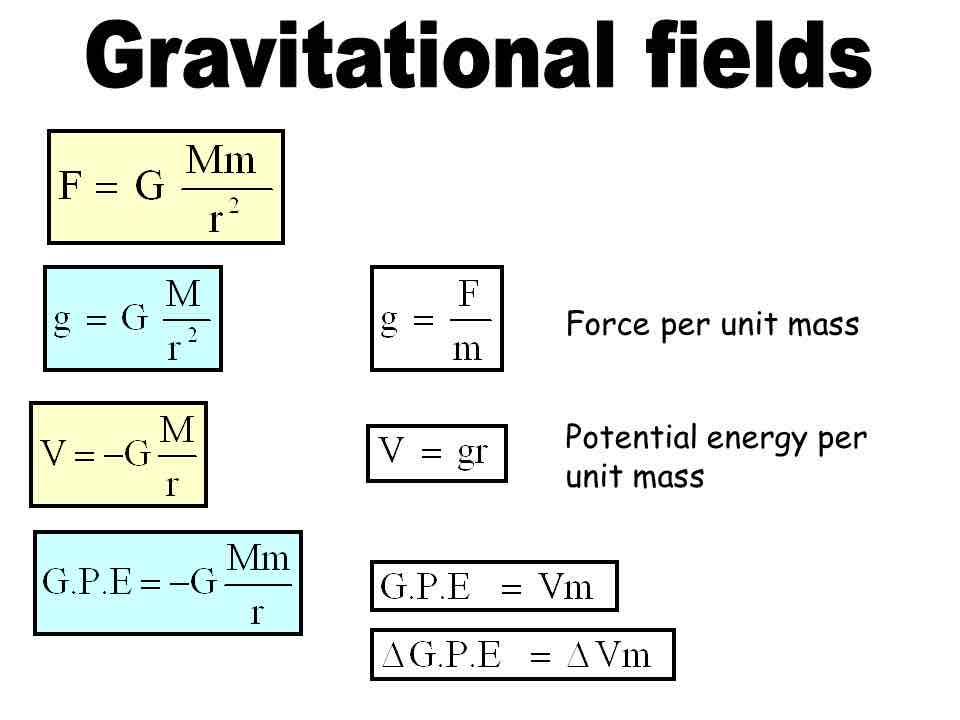
Gravitation Stuff
v = sqrt(GM / R)
Escape Speed
GPE = KE
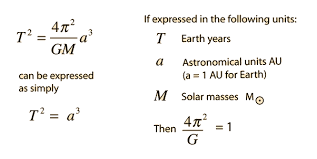
Kepler’s Third Law
Series & Parallel Springs
Series:
keff = k1 + k2 + …
Parallel:
1/keff = 1/k1 + 1/k2 + …
Equation for SHM
y = A sin (wt + 0)
Rotational Forces (Energy)
Rolling With Slipping
Kinetic friction present
Contact point: there is motion so not 0
Rolling Without Slipping
Static friction present
Velocity at the contact point is 0
Velocity of the center of mass = r w
KE = KEt + KEr
Slipping
pure translational motion
no friction
*smaller the moment of inertia, faster the object
Torque
Torque
increases when R increases
is ZERO when at the pivot point
Account for NET torque
Torque = integral( I * w )
NET TORQUE = 0 when in constant angular speed
*component of FORCE must be PERPENDICULAR to AXIS OF ROTATION
Bridge Equations
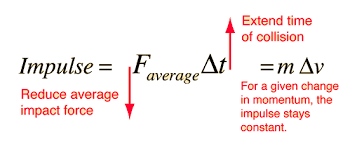
Impulse
When something bounces higher, larger impulse
Graph:
will look like absolute value function
impulse will reach a max and then go back to 0 because it is only exerted when contact is made
*cannot know unless u have time of contact
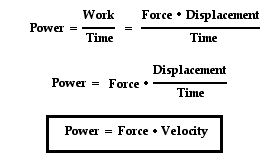
Power
Energy & Work
Gravitational Force
Writing Differential Equations
just make sure that you have a d/dt somewhere
Example:
Requisite from problem: F = βv2 (resistive force)
Fnet = ma → -βv2 = ma → -βv2 = m (dv/dt)
*Remember how to do Integration By Parts
Graphing x, v, a for FRQs
When there is a resistive force
position (x) increases but then levels off because acceleration is negative meaning that velocity is decreasing by time (like a square root curve)
velocity (v) starts at max but then decreases drastically then levels off to 0 since acceleration is negative (live a 1/x graph)
acceleration (a) is max in the negatives but then increases slowly and levels off to almost 0 when the resistive force equation looks something like this ( F = βv2) since velocity is directly proportional with acceleration
Rod (Center of Mass)
Center of Mass
located in the center of the rod
when using conservation of energy for ROTATION, use L/2 as the height for Ug
Conservation of Energy vs. Conservation of Momentum
Conservation of Energy
use when prompted with “just before the object hits other object”
use when object starts from higher place and then you need to find max compression of spring or velocity
TOTAL ENERGY (gravitational)
E = -(1/2) GMm/r
Conservation of Momentum
use when there is a COLLISION
When asking for velocity or angular velocity
use kinematics
Identical Disks
I = (number of disks) * Ieach disk
Momentum
MOMENTUM is ALWAYS conserved
KINETIC ENERGY is ONLY conserved in a PERFECTLY ELASTIC collision (so it may or may not be conserved)
explosions - momentum is conserved because it is an internal system
Springs
vmax → when spring is at equilibrium
amax → when spring is at maxcompression or max stretch
equilibrium is ALWAYS half the position of the AMPLITUDE
Free fall
When dropping an object from a plane and then a second object a second later:
vertical distance between the two objects is constantly increasing even though acceleration is the same
this is because there is acceleration so velocity changes at a constant rate but then distance changes at an exponential rate
Period of Pendulum & Angle
Period is not affected by angle as long as angle is SMALL
Vacuum
means that there is no air drag force or air resistance
AT free fall
Terminal Velocity
Before reaching Terminal Velocity,
there is still acceleration downwards