Kinesiology: Kinematics and Kinetics Introduction
1/117
Earn XP
Description and Tags
Chapters 1 and 2 of Brunnstrom
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
118 Terms
Biomechanics
the application of the principles of mechanics to the living human body
Kinesiology
combination of art and sciences involving the study of human movement
Kinetics
Concentrates on the forces that produce or resist the movement
Kinematics
Deals with types of motion or movement without regard to the forces
Osteokinematics
Focuses on the movements of the bony partners or segments that make up a joint
Arthrokinematics
Focuses specifically on the minute movements occurring in the joint surface
Frontal plane or Coronal plane
A cardinal plane that divides the body into anterior and posterior parts
XY plane
The frontal plane is also known as ____
Z Axis
The frontal plane rotates around the ____ and is perpendicular to it
Frontal plane
Identify the plane of these movements:
-
Adduction and abduction
Ulnar and radial deviation
Lateral flexion or bending
Sagittal plane
A cardinal plane that divides the body into left and ride sides
YZ plane
The sagittal plane is also known as the _____
X Axis
The sagittal plane rotates around the _____ and is perpendicular to it
Sagittal plane
Identify the plane of these movement:
extension and flexion
dorsiflexion and plantarflexion
Horizontal plane or Transverse plane
A cardinal plane that divides the body into upper and lower parts
XZ plane
The horizontal plane is also known as the _____
Y Axis
The horizontal plane rotates around the _____ and is perpendicular to it
Horizontal plane
Identify the plane of these movements:
Medial and lateral rotation
Pronation and supination
Eversion and inversion
Translatory Motion
Also called linear motion. This motion occurs along or parallel to an axis. All points of the moving object travel the same distance, direction, and velocity, and time.
Rotary Motion
Also called angular motion. This motion occurs in a circle around an axis or pivot point. This means that every point on the objected attached to the axis follows the arc of a circle
Axis of Rotation
This is where rotary motions take place which is the pivot point
Degrees of Freedom
The number of planes within which a joint moves
Uniaxial
Joints that move in one plane around one axis have one degree of freedom
plane, hinge, pivot joints
These types of joints are uniaxial
Biaxial
Joints that move around two axes, the segments moves in two planes, and the joint has two degrees of freedom
condyloid, ellipsoidal, saddle joints
These types of joints are biaxial
Triaxial
Joints that move around three main axes, all of which pass through the joint’s center of rotation
Ball-and-socket joint
This type of joint is triaxial
Goniometry
A valuable clinical measurement used to define the quantity of joint motion
Goniometer
A tool that looks like a protractor with two arms hinged at a fulcrum or axis. It measures the body joint’s range of motion in each plane of movement.
End feel
Resistance to further motion is palpated when a normal joint is moved passively to the end of its range of motion. This resistance is normally dictated by the joint’s structure
Hard end feel
A bony kind of end feel is felt when motion is stopped by contact of bone on bone
Soft end feel
Felt at the end of an available range of motion when soft tissues approximate each other, such as muscle to muscle.
Firm end feel
A capsular end feel is one in which the limitation feels springy because it occurs from the resistance encountered from the capsular, or ligamentous structures.
Pathologic end feel
An end feel that is not characteristic of the joint
Empty end feel
A pathologic type denoting pain on motion but absence of resistance. This happens when a joint lacks normal soft tissue stability and a supporting structure is not intact
Kinematic Chains
A combination of several joints uniting successive segments. Movement occurs when a combination of multiple joints work cooperatively to produce the desired outcome
Open Kinematic Chain (OKC)
The distal segment of the chain moves in space
Closed Kinematic Chain (CKC)
The distal segment of the chain is fixed and the proximal parts move
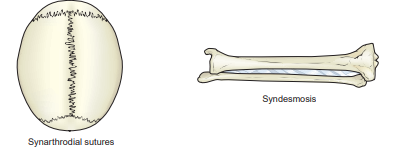
Synarthrodial Joints
Structure: Fibrous
Function: Stability, shock absorption, force transmission
Motion: Very slight
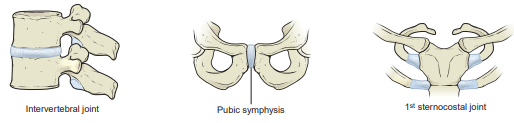
Amphiarthrodial Joints
Structure: Cartilaginous
Function: Stability with specific and limited mobility
Motion: Limited
Diarthrodial Joints
Structure: Synovial with ligaments
Function: Mobility
Motion: Free according to degrees of freedom
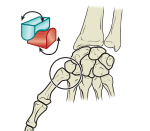
Nonaxial Joints
Structure: Irregular plane surfaces
Function: Contributory motion
Motion: Gliding
Uniaxial Hinge Joints
Structure: Hinge
Function: Motion in sagittal plane
Motion: flexion, extension

Uniaxial Pivot Joints
Structure: Pivot trochoid
Function: Motion in transverse plane
Motion: Supination, pronation, inversion, eversion

Biaxial Condyloid Joints
Structure: Generally spherical convex surface paired with a shallow concave surface
Function: Motion in sagittal and frontal planes
Motion: Flexion, extension, abduction, adduction
Biaxial Ellipsoidal Joints
Structure: Somewhat flattened convex surface paired with a fairly deep concave surface
Function: Motion in sagittal and frontal planes
Motion: Flexion, extension, radial and ulnar deviation

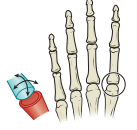
Biaxial Saddle Joints
Structure: Each partner has a concave and convex surface oriented perpendicular to each other; like a rider in a saddle
Function: Motion in sagittal and frontal planes with some motion in transverse plane
Motion: Flexion and extension, abduction and adduction, opposition of thumb
Triaxial Ball-and-socket Joints
Structure: A spherical type “ball” paired with a concave cup
Function: Motion in all three planes
Motion: Flexion and extension, adduction and abduction, rotation
Shoulder
flexion 0° to 180° (150° to 180°)
extension 0° hyperextension 0° to 45° (40° to 60°)
abduction 0° to 180° (150° to 180°)
medial rotation 0° to 90° (70° to 90°)
lateral rotation 0° to 90° (80° to 90°)
Elbow
flexion 0° to 145° (120° to 160°)
extension 0°
Forearm
supination 0° to 90° (80° to 90°)
pronation 0° to 80° (70° to 80°)
Wrist
neutral when the midline between flexion and extension is 0° and when forearm and third metacarpal are in line
flexion 0° to 90° (75° to 90°)
extension 0° to 70° (65° to 70°)
radial deviation/abduction 0° to 20° (15° to 25°)
ulnar deviation/adduction 0° to 30° (25° to 40°
Fingers
MCP flexion 0° to 90° (85° to 100°)
MCP hyperextension 0° to 20° (0° to 45°)
MCP abduction 0° to 20°
MCP adduction 0°
PIP flexion 0° to 120° (90° to 120°)
DIP flexion 0° to 90° (80° to 90°)
IP extension 0°
Thumb
MCP flexion 0° to 45° (40° to 90°)
MCP abduction and adduction (NEGLIGIBLE)
IP flexion 0° to 90° (80° to 90°)
Hip
flexion 0° to 120° (110° to 125°)
hyperextension 0° to 10° (0° to 30°)
abduction 0° to 45° (40° to 55°)
adduction 0° (30° to 40° across midline)
lateral rotation 0° to 45° (40° to 50°)
medial rotation 0° to 35° (30° to 45°)
Knee
flexion 0° to 120° (120° to 160°)
extension 0°
Ankle/Foot
neutral with foot at a right angle to the leg and knee flexed
plantarflexion 0° to 45° (40° to 50°)
dorsiflexion 0° to 15° (10° to 20°)
inversion and eversion
Toes
MTP flexion 0° to 40° (30° to 45°)
MTP hyperextension 0° to 80° (50° to 90°)
MTP abduction (slight)
IP flexion 0° to 60° (50° to 80°)
IP extension 0°
Rolling
A rotary or angular motion in which each subsequent point on one surface contacts a new point on another surface
Sliding
A translatory or linear motion in which the movement of one joint surface is parallel to the plane of the adjoining joint surface
Spinning
A rotary or angular motion in which one point of contact on each surface remains in constant contact with a fixed location on another surface
Accessory movement
Small arthrokinematic motions
Rolling, sliding, spinning
The order of arthrokinematic motion
Convex-Concave principle
If the join with the convex surface moves on the bone with the concave surface, the joint with the convex surface slides towards the opposite direction of the bone’s segment rolling motion
Concave-Convex principle
If the bone with the concave surface moves on the convex surface, the concave articular surface slides in the same direction as the bone’s roll does
Closed-Packed Joint Position
A position in where the joint perfectly matches
Open-Packed Joint Position
Or loose-packed position, this is a position in which the joint surface do not fit perfectly
Hypomobile
Limited mobility of a joint because of pain in the soft tissues
Hypermobile
The ligament no longer provides motion control
Gravity, Muscles (Internal forces), External, Friction
The four forces that are regarded in Kinematics
Type of Motion, Location, Magnitude, Direction, Range of Motion/Change
The determinants of motion
Translatory, Rotary motion
The types of motion
Planes, Axes
Locations of motion
Distance, displacement
The magnitude of motion
The three axes (X, Y, Z)
The directions of motion
Velocity, Acceleration
The rate of motion and change of motion
Newtons
The term for force in the metric system. 9.8 _____ is = 1 kgf
Moment
The result of force acting at a distance from the point of motion, or the axis
M = d x F
Equation of moment
Moment arm
the perpendicular distance from the force vector to the joint’s axis of motion. AKA Force arm
Lever arm
the perpendicular distance from the force vector to the center of motion. AKA Resistance arm
Direct
The relationship between the length of lever or resistance arm is ______ to the load or force enacted on the fulcrum
v = d/t
Equation for velocity
a = F/m
Equation for acceleration
Vector forces
Forces applied by or to the body have both magnitude and direction
Lever
A rigid bar that rotates around an axis or fulcrum
First-class lever
The force arm and resistance arm are equal. The weight on one side must be offset by a resistance or weight on the other side to stabilize. The mechanical advantage is equal to 1
Second-class lever
The force arm is longer than the resistance arm. This provides a force advantage so large weights can be supported by a smaller force. These types of levers are strength types in the body. The mechanical advantage is greater than 1
Third-class levers
The resistance arm is longer than the force arm. This is designed to produce the speed of the distal segment in the human body. It is the most common type of lever in the human body. The mechanical advantage is less than 1
Mechanical Advantage
_____ is equal to the Force Arm Length over the Resistance Arm Length
T = F x d⊥
Equation for torque
Head
Body segment weight: 10.3 lb (6.9% of the body weight)
Head
Center of Gravity: In sphenoid sinus, 4 mm beyond anterior inferior margin of sella. (On lateral surface, over temporal fossa on or near nasion-inion line.)
Head and Neck
Body segment weight: 11.8 lb (7.9% of the body weight)
Head and Neck
Center of Gravity: On inferior surface of basioccipital bone or within bone 23 ± 5 mm from crest of dorsum sellae. (On lateral surface, 10 mm anterior to supratragal notch above head of mandible.)
Head, Neck, and Trunk
Body segment weight: 88.5 lb (59.0% of the body weight)
Head, Neck, and Trunk
Center of Gravity: Anterior to 11th thoracic vertebra
Arm
Body segment weight: 4.1 lb (2.7% of body weight)