132 midterm
1/46
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
47 Terms
How many solutions can a linear system have
0, 1, or infinite
inconsistent system
0 = k (a row of all zeros except the last in the augmented matrix)
how many bits represent a number in a computer
64 bits
what happens when we store a real number in a computer
Most real numbers cannot be represented exactly in a computer. Generally, we wind up storing the closest floating point number that the computer can represent.
How many digits of accuracy is there in a floating point
We only have about 16 digits of accuracy
The relative error that can be introduced any time a real number is stored in a computer.
approximately 10^-16.
leading entry
the first nonzero element in a row
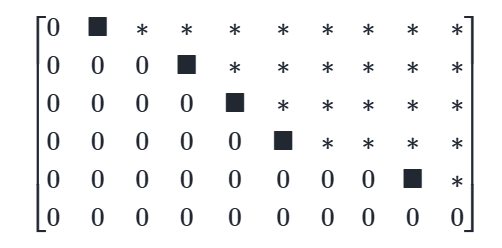
echelon form/row echelon form
All nonzero rows are above any rows of all zeros.
Each leading entry of a row is in a column to the right of the leading entry of the row above it.
All entries in a column below a leading entry are zeros.
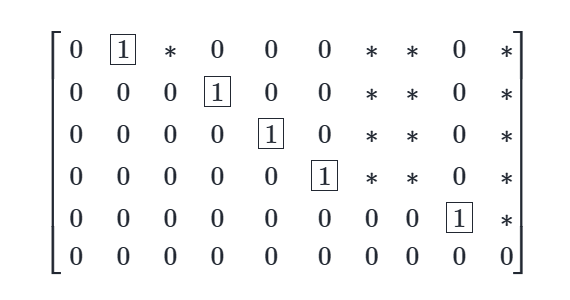
reduced echelon form/ row reduced echelon form
if it is in echelon form, and furthermore:
The leading entry in each nonzero row is 1.
Each leading 1 is the only nonzero entry in its column.
pivot position
the position of a leading 1 in the reduced echelon form of a matrix
The Cost of Gaussian Elimination
~(2/3)n³ flops
basic variable
Variables whose column has a pivot are called basic variables.
free variables
Variables without a pivot in their column are called free variables.
span
is the set of all possible linear combinations of a given set of vectors.
a matrix spans the whole R^n space when there is a pivot in every row
identity matrix
1s on the diagonal and 0s everywhere else
Linear dependence
The columns of A are linearly dependent if and only if Ax=0 has an infinite solution set (can include the trivial solution).
The solution set of Ax=0 has a free variable,
in other words, A does not have a pivot in every column.
If a set contains more vectors than there are entries in each vector, then the set is linearly dependent.
If a set S={v1,...,vp} in R^n contains the zero vector, then the set is linearly dependent.
Linear independence
The columns of the matrix A are linearly independent if and only if the equation Ax=0 has only the trivial solution x = 0,
pivot in each column
A transformation T is linear if:
T(u+v)=T(u)+T(v) for all u,v in the domain of T; and
T(cu)=cT(u) for all scalars c and all u in the domain of T.
T(0) = 0
rotation matrix (through angle θ)
A=[cosθ , −sinθ
sinθ cosθ].
counterclockwise rotation for a positive angle.
The determinant (2×2)
A=[a b
c d]
ad - bc
onto
A mapping T:R^n→R^m is said to be onto R^m if each b in R^m is the image of at least one x in R^n.
Informally, T is onto if every element of its codomain is in its range.
T is onto if there is at least one solution x of T(x)=b for all possible b
one-to-one
A mapping T:R^n→R^m is said to be one-to-one if each b in R^m is the image of at most one x in R^n.
If T is one-to-one, then for each b, the equation T(x)=b has either a unique solution, or none at all.
A vector b is in the range of a linear transformation if
the augmented matrix with vector b is consistent
Rules for Transposes
(AT)T=A
(A+B)T=AT+BT
For any scalar r, (rA)T=r(AT)
(AB)T=BTAT
For two n×n matrices, what is the computational cost of multiplication
2n³
matrix-vector multiplication what is the computational cost
2n²
inverse matrix of 2×2
If ad−bc≠0, then A is invertible and A−1=1/(ad−bc)[d −b
−c a].
If ad−bc=0, then A is not invertible.
inverse matrix larger than 2×2
Ax1=e1
Ax2=e2
⋮
Axn=en
solve the linear systems to get each corresponding column of A^-1
If any of the systems are inconsistent or has an infinite solution set, then A^−1 does not exist.
computational cost of matrix inversion
∼2n³
Using the Matrix Inverse to Solve a Linear System
x = A^-1b
rule for inverse matrices
(A−1)−1=A.
(AT)−1=(A−1)T.
(AB)−1=B-1A−1.
Invertible Matrix Theorem (only applies to square matrices)
the following statements are equivalent; that is, they are either all true or all false:
A is an invertible matrix.
AT is an invertible matrix.
The equation Ax=b has a unique solution for each b in Rn.
A is row equivalent to the identity matrix. (the reduced row echelon form of A is I.)
A has n pivot positions.
The equation Ax=0 has only the trivial solution.
The columns of A form a linearly independent set.
The columns of A span R^n
The linear transformation x↦Ax maps Rn onto Rn.
The linear transformation x↦Ax is one-to-one.
Invertible Linear Transformations
A linear transformation T:Rn→Rn is invertible if there exists a function S:Rn→Rn such that
S(T(x))=x for all x∈Rn,
and
T(S(x))=x for all x∈Rn.
probability vector
a vector of nonnegative entries that sums to 1.
stochastic matrix
a square matrix of nonnegative values whose columns each sum to 1.
Markov chain
a dynamical system whose state is a probability vector and which evolves according to a stochastic matrix.
steady state vectors
If P is a stochastic matrix, then a steady-state vector (or equilibrium vector) for P is a probability vector q such that:
Pq=q.
It can be shown that every stochastic matrix has at least one steady-state vector.
how to solve a Markov Chain for its steady state:
Solve the linear system (P−I)x=0.
The system will have an infinite number of solutions, with one free variable. Obtain a general solution.
Pick any specific solution (choose any value for the free variable), and normalize it so the entries add up to 1.
regular stochastic matrix
We say that a stochastic matrix P is regular if some matrix power Pk contains only strictly positive entries.
has a unique steady-state vector
numpy function that makes and n x m matrix of all zeros
np.zeros((n, m))
numpy function that makes and n x m matrix of all ones
np.ones((n, m))
numpy function that creates the n x n identity matrix
np.identity(n) or np.eye(n)
numpy function that creates a matirx with a, b, c,d on the diagonal
np.diag([a, b, c, d])
numpy function that creates an n x m matrix with random entries [0, 1)
np.random.rand(n, m)
numpy code for matrix multiplication of two matrices A and B
A @ B
numpy function to compare if two matrices A and B are equivalent/close
np.isclose(A, B) or np.allclose(A, B)
numpy fuction computes dot product of A and B (either vector or matrix)
np.dot(A, B)