Week 3 and 4: Segmentation
1/45
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
46 Terms
Goal of grouping in vision
Group features that belong together
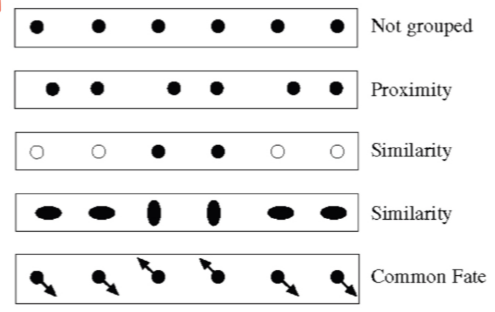
Gestalt psychology
Human visual system tends to group things together
Top-down segmentation
Pixels belong together because they are from the same object
Bottom-up segmentation
Pixels belong together because they look ‘similar’
K-means clustering algorithm
Randomly initialise the cluster centers c_1, \ldots, c_K
Given cluster centers, determine points in each cluster
For each point p, find closest c_i. Put p into cluster i
Given points in each cluster, solve for c_i
Set c_i to be mean of points in cluster i
If c_i have changed, repeat step 2
Properties of k-means
Will always converge to some solution
Can be a local minimum: does not always find the global minimum of objective function
Feature space
E.g. intensity (1D), colour (3D)
Why is feature space important
Encodes whatever property is desirable
E.g. for spatial coherence, cluster in 5D instead to encode similarity and proximity
Pros of k-means
Simple, fast to compute
Converges to local minimum within-cluster squared error
Cons of k-means
Setting k
Sensitive to initial clusters
Sensitive to outliers
Detects spherical clusters only
Multivariate normal distribution notation
\mathcal{N}(\mathbf{x}; \mathbf{\mu}, \Sigma) where mu is a vector containing mean position and sigma is a symmetric “positive definite” covariance matrix
Probabilistic clustering basic idea
Instead of treating the data as a bunch of points, assume they are all generated by sampling a continuous function
Function is called a generative model, defined by a vector of parameters \theta
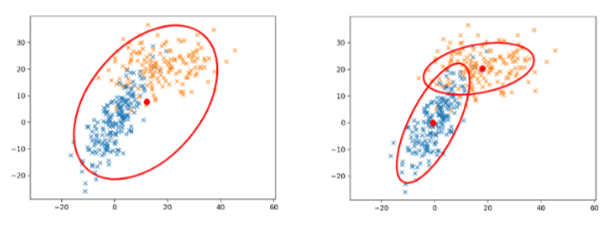
Why use Mixture of Gaussians model
Single normal distribution is often not good enough to cluster multiple groups
Expectation Maximisation (EM) algorithm goal
Find blob parameters \theta that maximise the likelihood function P(data|\theta)
Expectation Maximisation (EM) algorithm approach
E-step: Given current guess of blobs, compute ownership of each point
M-step: Given ownership probabilities, update blobs to maximise likelihood functionl
Repeat until convergence
Expectation Maximisation (EM) algorithm details
E-step: Compute probability that point x is in blob b, given current guess of \theta
M-step: Compute probability that blob b is selected, the mean of blob b and the covariance of blob b
Applications of EM
Any clustering problem
Any model estimation problem
Missing data problems
Finding outliers
Segmentation problems
Pros of Mixture of Gaussians, EM
Probabilistic interpretation
Soft assignments between data points and clusters (vs hard assignments in K-means)
Generative model, can predict novel data points
Relatively compact storage
Cons of Mixture of Gaussians, EM
Local minima
Initialisation
Need to know number of groups
Need to choose generative model
Numeric problems are a nuisance
What is often a good idea during initialisation of Mixture of Gaussians EM
Good idea to start with some k-means iterations so it’s not completely random
Mean-shift algorithm
Initialise random seed, and window W
Calculate center of gravity (“mean”) of W
Shift the search window to the “mean”
Repeat 2 until convergence
Real Modality Analysis
Can start the mean-shift algorithm from multiple points and parallelise the process.
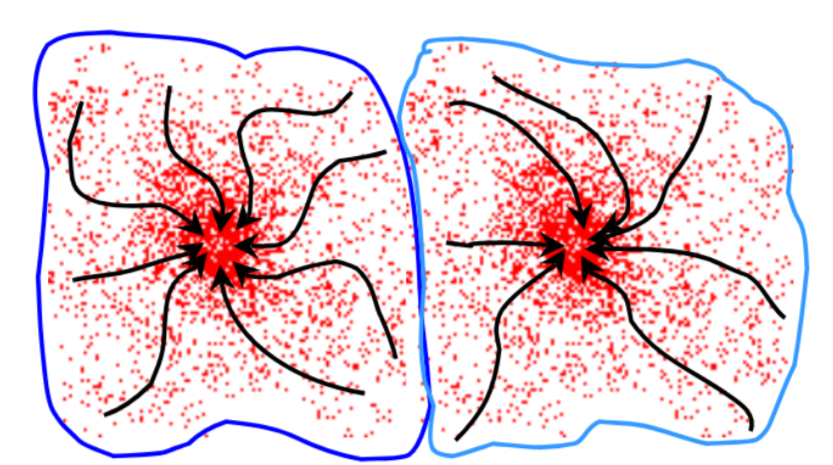
Mean-shift as used for clustering
Cluster becomes all the data points in the attraction basin of a mode, where the attraction basin is the region for which all trajectories lead to the same node
Pros of mean-shift
General, application-independent tool
Model-free, does not assume any prior shape on data clusters
Single parameter (window size h)
Finds variable number of modes
Robust to outliers
Cons of mean-shift
Output depends on window size
Window size selection is non-trivial
Computationally expensive (~2s / image)
Does not scale well with dimension of feature space (unviable beyond 3D)
Good news with mean shift window size selection
If we do select the right window size, it will find a global solution
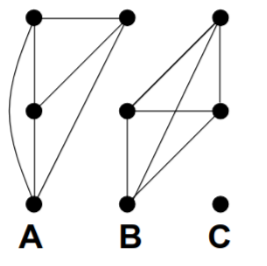
How to represent an image as a graph
Fully connected graph
Node for each pixel
Edge between every pair of pixels (p,q)
Affinity weight for each edge w_{pq} which measures similarity
Idea of graph-based segmentation
Break the graph into segments by deleting edges that cross between segments.
Where is it easiest to break edges in graph-based segmentation
When they have low similarity.
How can you represent a graph-based image
An affinity matrix. If graph is not directed, it is symmetrical. Can re-arrange components to see we have strongly connected components - clusters
Measures of affinity
Distance, intensity, colour
How does scale affect affinity
Small sigma: group only nearby points
Large sigma: Group far-away points
Cost of a cut
Sum of weights of cut edges
Minimum cut
Cut edges such that the cost of the cut is minimised - efficient algorithms exist for doing this
Why is minimum cut not always the best cut
Weight of cut is proportional to the number of edges in the cut
Minimum cut tends to cut off small, isolated components (e.g. a single outlier)
Normalised Cut (NCut)
A minimum cut penalises large segments, which can be fixed by normalising for size of segments.
Association is sum of all weights within a cluster.
Association in graph-based segmentation
assoc(A,A) would be sum of all weights within a cluster
assoc(A,V) = assoc(A,A) + cut(A,B) is the sum of all weights associated with nodes in A
Intuition for normalised cut is that big segments will have a large assoc(A,V) thus decreasing the Ncut(A,B)
Finding the globally optimal cut in graph-based segmentation
NP-complete problem but relaxed estimation can be solved using a generalised eigenvalue problem
Pros of normalised cuts (graph-based)
Generic framework, flexible to choice of function that computes affinities between nodes
Does not require any model of the data distribution
Cons of normalised cuts (graph-based)
Time and memory complexity can be high
Dense, fully connected graphs: many affinity computations
Solving eigenvalue problem

Graph segmentation: GrabCut
User helps the algorithm by selecting a box around the feature of interest

Graph segmentation: GrabCut process
Segmentation using graph cuts, requires having foreground model
Foreground-background modelling using unsupervised clustering, requires having segmentation
Improving efficiency of segmentation: Superpixels
Problem: Images contain many pixels (especially for graph-based)
Group together similar-looking pixels for efficiency of futher processing
Cheap, local over-segmentation
Important to ensure that superpixels…
Do not cross boundaries
Have similar size
Have regular shape
Algorithm has low complexity
Common definition of superpixel
Group of connected and perceptually homogeneous pixels which do not overlap any other superpixel
How to evaluate segmentation?
Use a ground truth made by a human
F = 2PR/(P+R)
Precision P: percentage of marked boundary points that are real ones
Recall R: Percentage of real boundary points that were marked