Introduction To Autonomous systems
1/108
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No study sessions yet.
109 Terms
Definition of Autonomous Systems
Autonomous Systems are systems that perceive the world and behave appropriately.
What is Autonomy?
Autonomy is the quality or state of being self-governing
Difference between autonomy, intelligence and cognition
Autonomy is the quality or state of being self-governing
Intelligence can be defined as:
(1): the ability to learn or understand or to deal with new or trying situations: reason; also: the skilled use of reason
(2): the ability to apply knowledge to manipulate one’s environment or to think abstractly as measured by objective criteria
Cognitive means involving conscious intellectual activity (as thinking, reasoning, or remembering)
What is the main concept of Braitenberg’s Vehicles?
Braitenberg vehicles are agents that can autonomously move around based on its sensor inputs. It has primitive sensors that measure some stimulus at a point, and wheels (each driven by its own motor) that function as actuators or effectors.
What are primitive operations and paradigms of autonomous systems?
Primitive operations: Planning, Sensing, Acting
Primitive Paradigms: Hierarchical, Reactive, Hybrid
What is Static and Dynamic stability?
Static stability of mechanism means that it will not fall even when not actuated, whereas dynamically stable robot instead requires constant actuation to prevent it from falling.
Definition of kinematics
Kinematics is the study of motion in space, without regard to the forces which cause it.
Additionally:
It studies the position, acceleration and speed of an object
The mass of the object is not taken into consideration
It is applied to study the movement of celestial bodies
Force is not considered
It is described with mathematical expressions
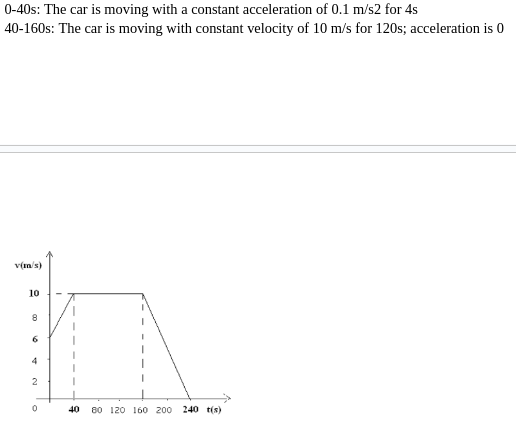
Describe the movement of the car from the graph from 0 s to 40 s and, based on the graph, determine the acceleration of the car in the time interval from 40 to 160 s.
Those people who have a result of 100 m in 10 s are considered to be very fast short-distance runners. What is that speed expressed in m/s and in km/h?
Speed = 10 m/s
Speed = 36 km/h
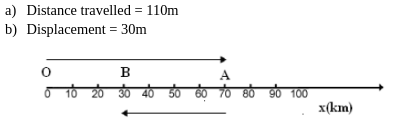
The car moved as in the picture from the starting point O to point A, then in the opposite direction to point B. Determine: a) How far did the car travel? b) What is the displacement of the car?
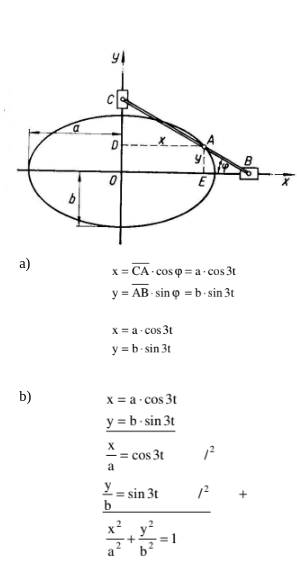
The equation of motion of flow A and its path should be determined. Stream A is attached to rod BC, whose ends can move in two directions mutually perpendicular axes x and y. The angle φ changes proportionally to the time t.
φ = 3⋅ t
Law of motion: x = f1(t); y = f2 (t) ?
Path: y = f(x) ?
Define Degrees of Freedom (DoFs)?
Degrees of freedom (DOF) refers to the number of independent movements an object can make. An object in the physical world can have up to 6 Cartesian degrees of freedom, namely forward/backward, sideways, and up/down as well as rotations (pitch, yaw, roll) around those axes.
Define Coordinate System, Frames and Points
A coordinate system is a system that uses coordinates to uniquely determine the position of the points.
A point is a fundamental concept and is used to tell only the exact location in space. It does not encode orientation and has no size.
A frame is encoded by position (with numerical coordinate values) and orientation (signaled by conventional markers/vectors).
Define Frames of Reference
A frame of reference defines a coordinate system relative to some point in space. It can be specified by a position and orientation relative to other frames
Define Rotation and Translation
Translation is a motion in which a straight line within the body keeps the same direction during the motion.
Rotation implies that the particles forming the rigid body move in parallel planes along circles centered around the same fixed axis (called the axis of rotation).
Define a point and frame using matrix notation
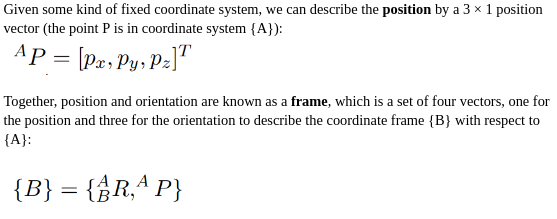
Define frame transformations between frames using matrix notation
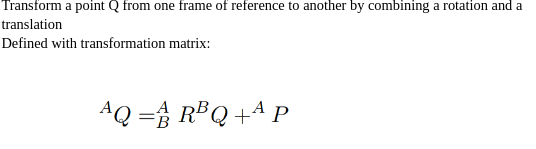
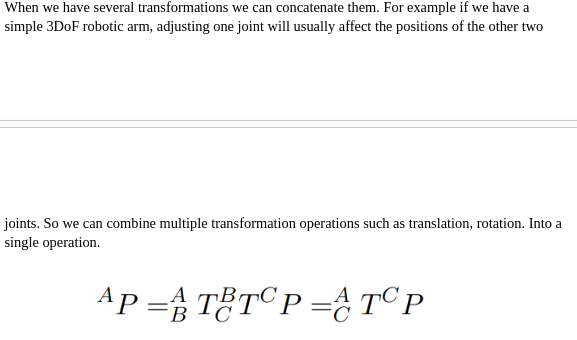
What is a concatenation of transformations, and provide an example
Define Roll-Pitch- Yaw representation of orientation
The Roll-Pitch-Yaw representation defines orientation using three sequential rotations about specific axes.
Roll is rotation around the X-axis.
Pitch is rotation around the Y-axis.
Yaw is rotation around the X-axis.
Define Euler Angles
Euler Angles help us describe rotations about specific axes. For example we move around for some angle around X-Y-Z axes of a fixed coordinate system. It’s also called X-Y-Z fixed-angle notation.
What are quaternions and what are they used for.
A quaternion is a 4-tuple that extends the complex numbers with very general applications in mathematics and representing orientation and rotation in particular.
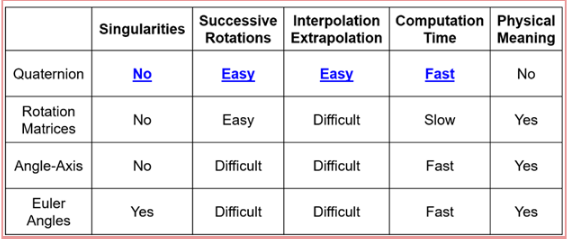
Provide a comparison of different representations of orientation
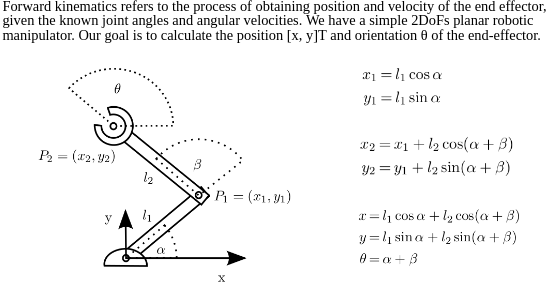
Define forward kinematics
Forward kinematics refers to the process of obtaining position and velocity of end effector, given the known joint angles and angular velocities.
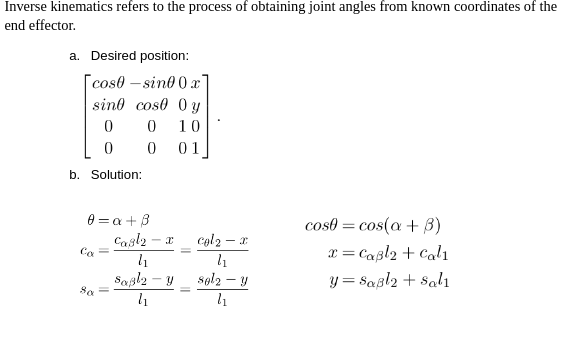
Define inverse kinematics
Inverse kinematics refers to the process of obtaining joint angles from known coordinates of the end effector.
Define equations for forward kinematics for 2DoFs planar robotic manipulator.
Define equations for inverse kinematics for 2DoFs planar robotic manipulator.
Define Forward Differential Kinematics
Forward differential kinematics deals with the problem of computing an expression that relates the generalized velocities at the joints (i.e. the “speed” of our motors) to the generalized velocity of the robot’s end-effector.
What is Dynamics?
Dynamics is a branch of physics that treats the actions of force on bodies in motion or at rest.
Define Newton’s laws.
First Newton’s Law: The body will remain in constant, rectilinear motion unless acted on by an external force.
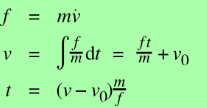
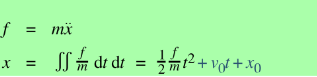
Second Newton’s Law: The time rate of change in body’s momentum mv is proportional to the externally applied forces.
Third Newton’s Law: Any force imposed on body by body is reciprocated by an equal and opposite reaction force on body by body.
How long does it take to accelerate a mass to a target velocity using a constant force?
What distance does a mass travel if a constant force is applied to it for a time?
Define Work
Work can be defined in two ways:
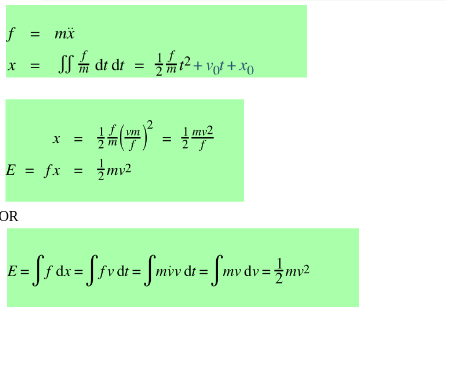
Work is the application of force over the distance traveled during acceleration.
Work is the energy transferred to or from an object via the application of force along a displacement.
Define Energy
Energy is a fundamental entity of nature that is transferred between parts of a system in the production of physical change within the system and usually regarded as the capacity for doing work.
Define kinetic and potential energy
Kinetic energy is determined by the movement of an object (or the composite motion of the object's components).
Potential energy reflects the potential of an object to have motion, generally being based upon the object's position within a field or what is stored within the field itself
Define Elastic Potential Energy
Elastic potential energy is energy stored as a result of applying a force to deform (or stretch or compression) an elastic object.
Explain how much work it takes to accelerate a mass to a velocity.
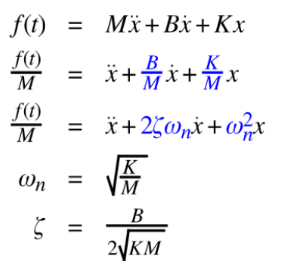
Define the physical properties of the SMD system.
Define a center of mass
The centre of mass of a system is a hypothetical point, where the entire mass of the body issupposed to be concentrated. For pure translational motions, forces acting on the center of mass of a finite body have the same effect as if all of this body’s mass were concentrated there. Center of mass can be calculated by:

Define conservation of momentum
Newton’s 1st and 2nd laws together state that linear momentum is conserved in the absence of external forces.
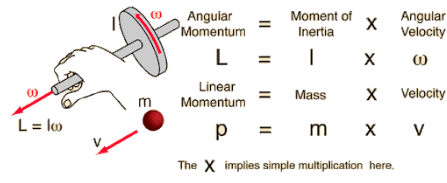
Define linear and angular momentum
What is a control system?
A control system manages, commands, directs, or regulates the behavior of other devices or systems using control loops.
What is a controller?
A controller is the component of a system that monitors certain input variables and adjusts other output variables to achieve the desired operation.
What is a closed-loop control system?
Closed-loop controller (or feedback controller) is a control loop which incorporates feedback, in contrast to an open-loop controller or non-feedback controller. It uses feedback to control states or outputs of a dynamical system. Process inputs (e.g., voltage applied to an electric motor) have an effect on the process outputs (e.g., speed or torque of the motor), which is measured with sensors and processed by the controller. The result (the control signal) is "fed back" as input to the process, closing the loop.
What is a PID controller?
Proportional–integral–derivative controller (PID controller or three-term controller) is a feedback-based control loop mechanism commonly used to manage machines and processes that require continuous control and automatic adjustment.
Term P is proportional to the current value of the SP − PV error. It ensures quick reaction
Term I accounts for past values of the SP − PV error and integrates them over time
Term D is a best estimate of the future trend of the SP − PV error, based on its current rate of change.
What is the difference between PD and PID controllers?
A PD controller improves transient response by addressing rise time, overshoot, and oscillations but does not eliminate steady-state error as it lacks the integral term. A PID controller provides comprehensive control by adding the integral term to correct steady-state errors, making it suitable for systems requiring precision and stability.
What are actuators and which types are there?
Actuators are machines that move or control components in a system by converting energy into physical motion. This energy can come from electricity, water pressure, or air pressure. There are three types of actuators:
Electric
Hydraulic
Pneumatic
What are the types of electric motors, and what is the draw classification scheme?
Types of electric motors:
AC and DC Motors
Stepper Motors
Brushless DC Motors
Servo Motors
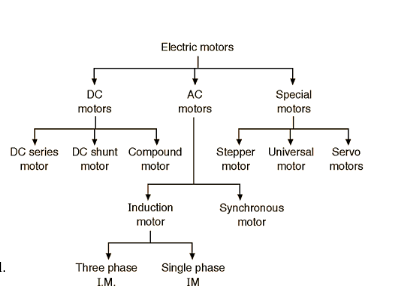
Explain the difference between AC and DC motors.
AC Motors use alternating current. They have a simple design and are reliable.
DC Motors use direct current. Their advantage is speed control.
What are stepper motors?
Stepper motors are controlled by a driver, which sends the pulses into the motor causing it to turn. The number of pulses the motor turns is equal to the number of pulses fed into the driver. They have high precision control without feedback.
Key feature: Moves in discrete steps
Applications: CNC machines, 3D printers.
What are servo motors?
A servomotor is a rotary or linear actuator that allows for precise control of angular or linear position, velocity, and acceleration in a mechanical system. It constitutes part of a servomechanism, and consists of a suitable motor coupled to a sensor for position feedback and a controller.
Key features:
Integrated control for position and speed.
Used in robotic arms, grippers.
Offers precise angular movement.
What are brushless DC motors?
A brushless DC electric motor (BLDC), also known as an electronically commutated motor, is a synchronous motor using a direct current (DC) electric power supply. It uses an electronic controller to switch DC currents to the motor windings producing magnetic fields that effectively rotate in space and which the permanent magnet rotor follows.
Key features:
Higher efficiency and performance.
No brushes, less wear and tear.
Applications: Drones, electric vehicles.
Sensors definition and working principle
Sensor is a device, module, or subsystem that transforms a property of the physical (“real”) world to a signal that can be read by electronic/digital systems – to “data”.
Working principle: A sensor typically transforms a “real world” property into a voltage (or current, which then gets converted to a voltage ) which is then digitized. Some physical effect is needed to make that transformation.
How are sensors classified?
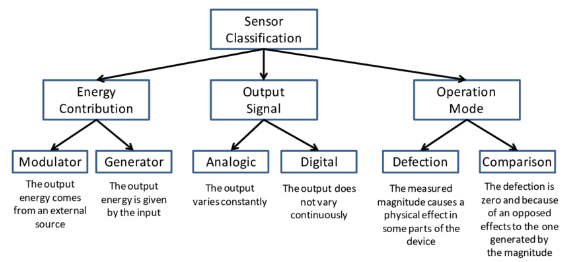
Define the sensitivity, range, precision and accuracy of sensors
Sensitivity – minimum change needed to change output
Range – minimal and maximal values
Precision – spread - ability to give same value under same conditions
Accuracy – bias, ability to give true value under same conditions
Define the resolution, offset, hysteresis and response time of sensors
Resolution – minimal difference that can be told apart
Offset – Bias
Hysteresis – dependence on former history
Response Time – how fast
Definition and types of sensor errors
Sensor errors are deviations between the true value and the sensor's measured value. They can lead to inaccurate system performance and safety risks.
Types of Sensor Errors:
Systematic Errors:
Bias: Constant deviation from the true value.
Drift: Gradual deviation of sensor readings from the true value over time.
Scale Error: Incorrect sensitivity (e.g., gain errors).
Nonlinearity: Output not proportional to input.
Random Errors:
Noise: Unpredictable fluctuations in sensor output.
Environmental Errors:
Caused by external factors like temperature, humidity, or vibration.
What is sensor calibration?
Sensor calibration means aligning sensor outputs with known reference values to ensure accuracy. It improves accuracy and reliability and ensures safety and consistency.
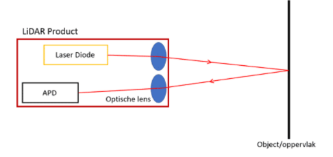
Explain the LiDAR sensor principle of working.
To be able to measure the distance to an object or surface with a laser, it uses LiDar (Light Detection of Laser Imaging And Ranging) technology.
The LiDAR laser emits a laser pulse to an object or surface. The pulse is then reflected. The distance is calculated based on the elapsed time between the emission of the laser pulse and receiving the reflection.
What is sensor fusion
Sensor Fusion means combining data from multiple sensors to improve accuracy and reliability.
Sensor fusion enhances robustness and reduces uncertainty. An example is SLAM (Simultaneous Localization and Mapping) which uses lidar, cameras and IMU for mapping and navigation.
What is obstacle avoidance in robotics?
Obstacle avoidance is the capability of a robot or an autonomous system/machine to detect and circumvent obstacles in its path to reach a predefined destination.
What type of sensors are used for obstacle avoidance and what is their role?
Most common approaches to obstacle avoidance is the use of various sensors, such as ultrasonic, LiDAR, radar, sonar, and cameras. These sensors allow an autonomous machine to do a simple 3 step process: sense, plan, and act
What is path planning, what are common path planing approaches?
Path planning part belongs to the control or decision-making part of the unmanned vehicle and vessel architecture system.
Global path planning, also known as global navigation planning. Pure geometric path planning from the starting point to the target point, independent of time series and vehicle dynamics
Path Planning Algorithms are critical for optimally calculating and routing collision-free paths
How is ML used in path planning?
Machine learning (ML) enhances obstacle avoidance by enabling autonomous systems to adapt and learn from dynamic environments.
Capabilities:
Adaptive Path Planning
Task and Reward System
Real-time adaptation.
Explain Bug 1 Algorithm
Bug algorithms assume only local knowledge of the environment and a global goal. Bug 1 has three main steps:
Head toward goal,
If an obstacle is encountered circumnavigate it and remember how close you get to the goal
Return to that closes point(by wall-following) and continue.
Explain Bug 2 Algorithm
Bug 2 assume only local knowledge of the environment and a global goal. It has m-line going from starting point to the goal. Bug 2 has three main steps:
Head toward goal on the m-line
If an obstacle is in the way follow it until you encounter m-line again.
Leave the obstacle and continue toward the goal.
Compare Bug 1 and Bug 2 Algorithms
BUG 1 is an exhaustive search algorithm – it looks at all choices before commiting
BUG 2 is a greedy algorithm – it takes the first thing that looks better
In many cases, BUG 2 will outperform BUG 1, but BUG 1 has a more predictable performance overall
Explain Tangent Bug Algorithm
Tangent Bug algorithm senses the distance to the nearest obstacle all around the robot. State of the art; good approximations to globally optimal paths in many realistic scenarios. Slightly more involved to implement. (It is typically described in terms of the local tangent graph, but the following explanation succeeds without it.)
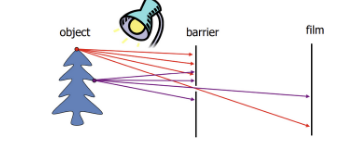
Describe the work of Pinhole camera
First, we will place a piece of film in front of an obstacle, then add a barrier to block off most of the rays.
Light rays from different points on an object travel in straight lines and pass through the small pinhole. Only one ray of light from each point on the object can pass through the pinhole due to its small size. These rays then hit specific corresponding points on the light-sensitive surface, forming an image. The image appears inverted (upside down).
What is Camera Obscura
Camera Obscura is the natural phenomenon in which the rays of light passing through a small hole into a dark space form an image where they strike a surface, resulting in an inverted (upside down) and reversed (left to right) projection of the view outside.
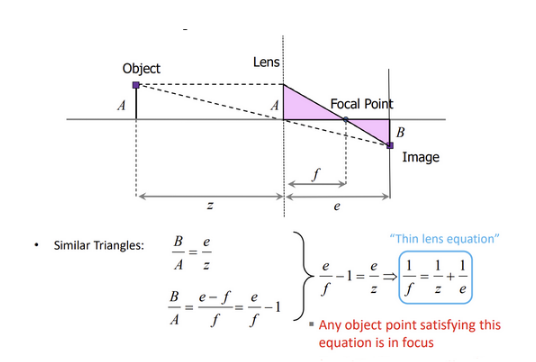
Define Thin Lens Equation
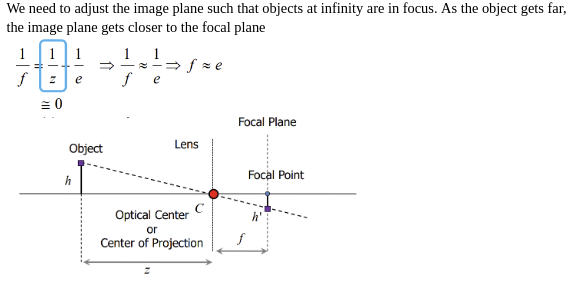
What is Pin-hole Approximation
This is known as Pinhole Approximation and the relation between the image and object becomes:

. So Pinhole Approximation can be used to measure the distance between camera and object.
Explain Perspective Effect
Perspective effect is that far away objects appear smaller in pictures. Also there is perspective projection where straight lines in 3D world remain straight in the images as well.
Define digital camera and color image
Digital camera is a camera where the film is an array of CCD or CMOS light sensitive diodes that convert photons (light energy) into electrons. The image is represented as a matrix of pixels, each pixel is 8-bit value between 0 and 255.
A color image is represented as three matrices: red, green and blue. For each pixel, the intensity of the red, green, and blue components is determined, specifying how much of each color contributes to the final image.
Explain how is done color sensing in digital cameras
So, color sensing is done using the Bayer grid or pattern. This works by putting a green filter over half of the sensors and the rest are red and blue filters. This is because the human eye is more sensitive to luminance, and green represents luminance best, whereas blue and red represent chrominance, which is like saturation. The human eye is less sensitive to that. Then for each pixel, an estimate is made for remaining components (also called demosaicing).
Define and explain different color representations
Well, we have RGB, which stands for red, green, blue, and these can be represented as axes that actually correspond to three types of cones in the human retina. They also measure intensity of red, green, and blue, and values go from 0–255.
We have HSV, and this allows colors to be compared with their hue, saturation, and value.
Define mapping and types of maps
Mapping is the process of building a representation of the environment.
Types of maps:
Grid-Based Maps - maps divided into a grid system, typically by using lines of longitude (vertical) and latitude (horizontal)\
Metric Maps - Represent the environment with precise spatial coordinates.
Topological Maps - Represent the environment as a graph of connected nodes.
What is localization
Localization is the process of determining the robot's position within environment.
What is the role of odometry in localization
The role of odometry is to approximate the position of robot/agent in the environment using some known data about robot movement like velocity and orientation.
What are main causes of odometry errors
Wheel Slippage: Caused by slippery or uneven surfaces, rapid acceleration, or turning on loose ground.
Uneven Surfaces: Variations in terrain like bumps or slopes distort wheel rotation data.
Sensor Noise: Errors in wheel encoders or other sensors due to imperfect calibration or electrical noise.
Mechanical Imperfections: Includes unequal wheel sizes, wear and tear, misaligned wheels, or backlash in gears.
Cumulative Errors: Small errors in measurements that build up over time, leading to significant drift.
What is SLAM
SLAM is process of computing the robot’s pose and the map of the environment at the same time.
Explain Dijkstra algorithm
Initialize: Assign a distance of 0 to the source node and infinity to all others. Mark all nodes as unvisited.
Visit Nearest Node: Select the unvisited node with the smallest distance.
Update Neighbors: For each neighboring node, calculate the tentative distance. Update it if the new distance is shorter.
Mark as Visited: Mark the current node as visited (processed).
Repeat: Continue until all nodes are visited or the shortest path to the desired destination is found.
What are Probabilistic Roadmaps
Probabilistic Roadmaps (PRM) are a widely used method in robotics for path planning in high-dimensional or complex environments. They are particularly effective for static environments.
Define Reachable Workspace
The reachable workspace of a mechanism is the totality of positions that a particular identified point of the end effector can reach, which is referred to as the workspace.
What is task space and what is joint space
Task space (Cartesian space): The space in which the end-effector of a robot operates, typically described in terms of Cartesian coordinates
Joint Space (Configuration space): The space defined by the robot's joint parameters, such as angles for rotary joints or displacements for prismatic joints.
Define navigation and what types of navigation
Navigation is the process by which a robot/autonomous vehicle moves from its current location to a desired goal while avoiding obstacles and ensuring efficiency.
Types of Navigation:
Reactive Navigation: Makes real-time decisions based on immediate sensor data. Quick but limited for long-term planning.
Deliberative Navigation: Utilizes maps and plans the entire route in advance. Suitable for complex, goal-oriented tasks.
Hybrid Navigation: Combines reactive and deliberative methods for robustness.
What are cognitive systems and cognitive robotics?
A cognitive system is an autonomous system that can perceive its environment, learn from experience, anticipate the outcome of events, act to pursue goals, and adapt to changing circumstances.
Cognitive Robotics or Cognitive Technology is a subfield of robotics concerned with endowing a robot with intelligent behavior by providing it with a processing architecture that will allow it to learn and reason about how to behave in response to complex goals in a complex world.
Define Primitives in Cognitive Systems
Perception (Observations): seeing shape, objects
Mapping: Where are the object in relation to robot
Localization: Where is the robot?
Adaptation: Where should it move/
Configuration: Passing object manipulating environment
Learning – How can I do it better?
Human–Robot interaction: Can we communicate?
Define cognitive architectures and their types
Cognitive architectures are the need for having different parts of the system responding at varying time intervals.
It also refers to the design and organizational structure of software and hardware systems that enable rotots to perceive, process, decide, and act in their environment.
Types:
Reactive Architectures focus on immediate responses to environmental stimuli.
Deliberative Architectures plan actions based on long-term goals and world models.
Hybrid Architectures combine reactive and deliberative components for a balanced approach.
What are primitive cognitive operations and basic paradigms
Basic operations: Sense, Plan, and Act.
Basic paradigms:
Hierarchical:
Sense → Plan → Act.Reactive:
Sense → Act.
Hybrid:
Sense → (Plan + Act).
What are the features of the modular approach to cognitive architectures
This approach is something like "divide and conquer." Usually, complex problems can be divided into smaller ones.
Features of the modular approach:
Abstraction and common interface.
Code reuse.
Encapsulation.
Separation.
Easier debugging.
Explain Sense-Plan-Act architecture
Sense-Plan-Act was an early robot control procedure. It was foundational to early AI systems and it implies three critical capabilities that every robot must have in order to operate effectively:
SENSE: The robot needs the ability to sense important things about its environment, like the presence of obstacles or navigation aids.
PLAN: The robot needs to take the sensed data and figure out how to respond appropriately to it, based on a pre-existing strategy.
ACT: Finally, the robot must actually act to carry out the actions that the plan calls for.
Explain the backboard style cognitive architecture
The Blackboard is like a shared workspace or information pool where all subsystems communicate through it.
Explain reactive behaviours architecture
In this architecture, robots directly respond to environmental stimuli without planning, as input (sensors) pass through to output (actuators).
Explain Subsumption architecture
In this architecture, control is layered, with higher layers subsuming lower layers when they wish to take control.
Each layer represents a complete operational system:
Sensors → Layer → Actuators
Each layer is composed of finite state machines, which control state and help robots decide actions based on their current state.
Explain Behavioral trees
They can be viewed as a restricted or more structured class of finite state machine and a graphical way of procedural (or concurrent) programming.
Strengths:
Structured yet powerful
Natural hierarchical decomposition: any subtree is again a behaviour tree
Inherent represents concurrency
Weaknesses: Usefulness in robotics is yet to be demonstrated
What is AI Planning
Planning is the act of thinking before acting. The main components of a planning problem are:
A description of how the world behaves and the agent’s capabilities
A description of initial situation (initial state)
A description of the desired situation (goal)
Multi-Robot vs. Single-Robot
Multi-Robot systems are systems which use multiple robots whereas a single robot is using only one.
Advantages:
Automated task execution
Parallel task execution: actions can be performed simultaneously
Enhanced robustness: failure of an individual robot should not affect the entire team
Increased range of applications: certain tasks cannot be solved by a single robot or require specialization
Disadvantages:
Interference: robots may interfere with each other, and there is uncertainty about the intentions of other robots
Communication: limited communication bandwidth between robots
Maintenance: maintaining multiple robots is more challenging
What are key components of Multi-Agent Systems
Key components are:
Task allocation: assigning tasks to agents based on their capabilities, locations, and resource availability
Methods: auction-based, market-based, or optimization algorithms
Scheduling: determining the order and timing for task execution to minimize delays or maximize efficiency
Coordination: managing dependencies among agents to ensure tasks are completed without conflicts or deadlocks
Communication: Sharing information between agents for real-time updates and coordination
Execution Monitoring: Tracking task progress and re-planning if agents encounter obstacles ir fail to complete tasks
What are key definitions in taxonomy of multi-agent systems
Key Definitions:
Collaboration:
Cooperative: Robots collaborate to achieve a common goal
Competitive: Robots compete to best fulfill their own interests, i.e. robots may cooperate or form coalitions if it aligns with their personal interests
Communication:
Implicit: Information is transmitted through the environment
Explicit: Information is directly exchanged between robots
Organization:
Centralized: global coordination and planning
Hierarchical: military model - a hierarchy of leaders
Decentralized: Local coordination, with global behaviour patterns emerging as a feature
Hybrid: A combination of the above
Team Composition:
Homogeneous - all robots have identical hardware and software
Heterogeneous - robots differ either in sensory-actuator capabilities or in software control procedures
Swarm - a large number of typically homogeneous robots, with local control and little to no explicit communication
Explain swarms and name an example of swarm robots
Swarms refer to large scale systems of relatively simple agents (robots, drones or other agents) that work collectively to perform tasks by following decentralized and distributed control strategies. Inspired by natural systems such as insect colonies, bird flocks, fish schools. Swarms are characterized by their scalability, robustness and emergent behaviour.