Psych 120B Object recognition/motion/depth
1/72
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
73 Terms
viewpoint invariance
The ability to recognize an object regardless of the viewpoint one has observing the object
Ex. face experiment: face at different angles could be recognized
Ex. Greebles: take longer with large angle, not fully viewpoint invariant
Some tasks do. Some objects don’t have
Steps of Object recognition
S
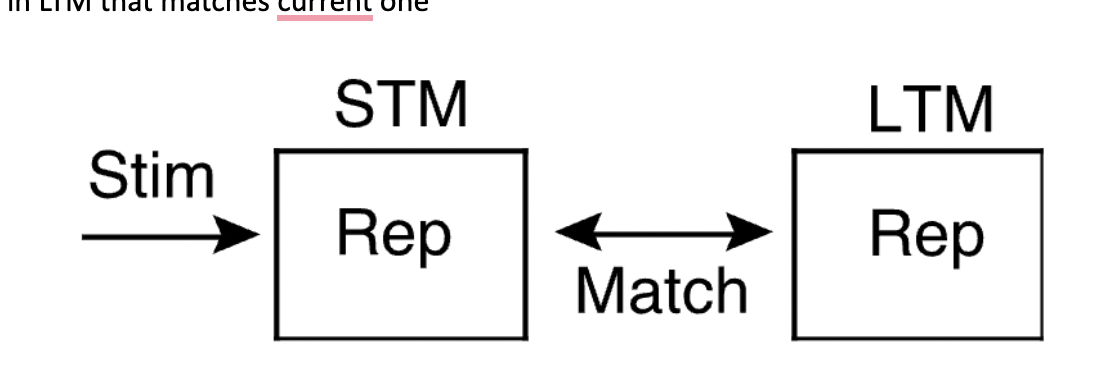
teps: represent physical stimulus in short-term memory(STM) then find representation in LTM that matches current one
What are the theories of object recognition
Template theory, feature detection theory, structural descriptions
Template Theory
representations are mental images(LTM is templates)
Match template well=object
Matching process is correlational: highest correlating template wins
Disadvantages of Template Theory
Disadvantages: too many views possible, require to many templates in LTM
Transformation step(rotate/change to match template) not enough invariance
Feature Detection Theory
define smaller features necessary to be in a category
What is the Pandemonium Model steps of feature detection theory
1. Image demon: receives sensory input 2. Feature demons: decode/ determine specific feature Ex. Break down R into vertical line, curve..) 3. Cognitive demons: “shout” when receiving certain combinations of features(Ex. Gets info from feature demon to determine R) 4. Decision demon: listens for lourdest shout in pandemonium to identify input
Disadvantages of Pandemonium Model
Problems: bottom-up model(data driven) can’t explain how context influences perception
Structural Descriptions:
representations by structural components, ex. A =long segment at 45 angles to short segments)
Geons
What are geons and componentt/purpose
Geons: geometric elements of which all objects are all composed(36 different shapes, easily discriminated, viewpoint invariant-look the same at dif angles, robust to with noise(blurry) still able to recognize
Volumetric representation: geons allow for partial encoding 3D structures of objects- recognize objects based on components
Strength of Geons/Structural Descriptions
recognize partially occluded objects if geons can be determined, easier to recognize with corners
Weaknesses of Geons/structural description not enough
structural description not enough, need metric info, ambiguity in structural description, most often we have several candidates, doesn’t include mechanism for contextual influences on object recognition
How is sensitivity to motion measured
retinal velocity (how fast an image's position is changing on retina)
Subject-relative motion:
empty field with no background reference= 10/20 min/sec(how fast eyes can perceive)=less sensitive to motion (slowest motion to detect)
Object relative motion(with background reference)
1-2 min/second= more sensnitive with background
Retinal displacement:
when position of object’s image on retina changes
Optical pursuit
track a moving object with eye (stays in one place in retina)
apparent motion
Images flash on/off in separate locations within a certain timing-nothing really moves but perceived as motion
Gives sense of timing perceptual system needs to perceive motion
What is spatial disparity and timing between the stimuli to perceive motion with apparent motion
Spatial disparity(distance between stimuli): s<60ms looks simultaneous S:60-200ms looks like motion; S> 200 ms looks like succession not movement
Indirect Perception Theory
motion is not a basic perceptual quality and it derived from other things(position, timing)
Direct Perception Theory
motion is a basic perceptual quality, the system is wired to, you dont need to derive it from other things(position, timing)-correct based on exner and wetherimers experiment
Exner experiment
timing): can detect motion before timing info=direct theory
Wetherimer’s experiment
we have phi or objectless motion so we don’t need position=direct theory
Reichardt Detectors
Network of cells for motion detection:model of how the brain detects motion by comparing signals from two neighboring sensors (A and B), where the signal from the first sensor is delayed before being compared to the signal from the other by adding interneuron(D)
A and B have to activate M at the same time for it to fire
Multiple Reichardt detectors allow motion tracking for longer distances
Direction specific: only fire for detection in one direction
how opponent processing explains motion aftereffects
Two Reichardt detectors with one in the right direction(excitatory) and other in left direction(inhibitory) = resulting motion is the sum of activation from the opposite direction detectors
-one becomes fatigued when motion stop balance becomes uneven so the opposite is seen
Define the aperture problem and describe how the visual system solves this problem
When viewed through a small hole(aperture) it is not clear what direction the motion actually is because can’t see all edges, only has a tiny view so cant do it on its own, can only see a small part of space
Solves: combine multiple apertures with global motion detectors: cells that combine the input of multiple motion detectors
Motion specific regions in the brain
MST and V5
Describe how the brain distinguish self- and object-motion,
Eye movement versus object movement: Reichardt detector can’t determine on their own-needs external info
Motion system send out two copies of its signal:
One goes to eye muscles causing them to move\
Other is efference copy: goes to region in visual system called comparator: knows about visual motion and compensate for image changes caused by eye movement, inhibits other parts(determine if eye moves or world is moving)
What are the two copies of signals that motion sends out to distinguish between eye movement versus object movement
Image movement signal:One goes to eye muscles causing them to move\
Other is efference copy(eyemovement): goes to region in visual system called comparator: knows about visual motion and compensate for image changes caused by eye movement, inhibits other parts(determine if eye moves or world is moving)
What signals are sent ONLY if eye moves not object
Efference copy + image movement signal
What signals are sent if the Object moves and eye does not
Only image movement signal
Self-motion:
movement of body rather than eyes(optic flow, focus of expansion, radial expansion)
Optic flow:
body moves through space, creates distinct visual pattern as perspective changes
Focus of expansion:
point you are heading to
Radial expansion
objects you are moving closer to and past expands outward
Structure-from-motion
ability to extract object structure from moving displays(ex.dots moving turn into cylinder)
Rigid motion
describes motion of an object in space during which there are no changes in distances between any two points on the objects - allows for rotation and translation of an objects(cube moving/won’t stretch/rigid)
Non-rigid motion:
biological motion (elastic, and jointed)
Size constancy:
understanding that the size of a retinal projection for an object does not change size
Metric depth cue
Distance
Non-metric depth cue
depth
Binocular depth cues:
relies on info from both eyeballs
Monocular depth cue
relies on info from one eye
Four types of depth cues
Kinematic, stereoscopic, ocularmotor, pictorial
Kinematic info
depth cues emerging from moving objects
Types of Kinematic info
Motion perspective/parallax, optical expansion/contraction, accretion/deletion of texture
Motion perspective/parallax(type of cue, def, and metric, binocular or monocular)
Type: Kinematic
Def:when the observer moves, displacement of object’s image on eye depends on distance - things closer to your eye moves faster than farther objects (train example)
Metric: relative metric
-mononcular
Optical expansion/contraction(type of cue,def,binocular or monocular)
type: kinematic
def: when an objects approaches, its image expands.
-monocular
Tau: ratio of the retinal size of the object to the rate at which that size is changing is called tau (proportional to the time to collision) of an approaching object
Tau
-part of Optical expansion/contraction
ratio of the retinal size of the object to the rate at which that size is changing is called tau (proportional to the time to collision) of an approaching object
accretion/deletion of texture(type of cue, def)
type:kinematic
def:when a surface moves relative to another surface, the nearer surface progressively occludes background texture on the farther surface
Stereoscopic information
depth cues emerging from discrepancies in the retinal images projected to both eyes
Types of Stereoscopic information
Binocular disparity
Binocular disparity(type, def, metric, binocular/monocular)
Type: stereoscopic
def:the differences in the two eyes views of an object - relative metric
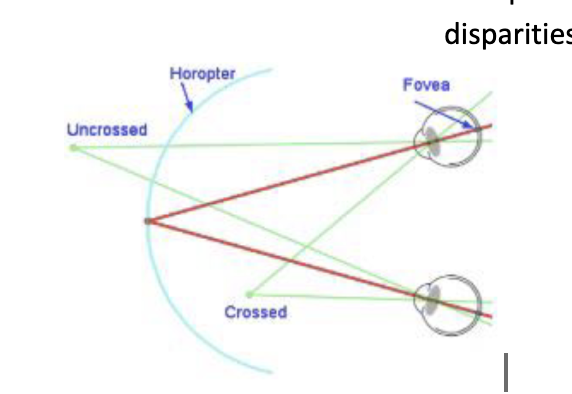
Horopter: sets of points in the world having identical binocular disparities
Horopter
sets of points in the world having identical binocular disparities
Crossed disparity
crossed disparity: eyes focus before/within the horopter, indicates that a point is nearer to t
he observer than the point being fixated
Occulomotor info
depth cues emerging from motion of the eyeballs in the skull
Types of Occulomotor info
Accommodation, Convergence
Accommodation(type of cue, def,metric type)
type:occulomotor
def: changing the shape of the lenses to help focus the eye - movement of lens controlled by ciliary muscles (contract = lens thick = focus on near; relax = lens stretch = focus on far)
-metric
Convergence(type, def, metric type)
Type: occulomotor
def:turning the eyes in order to focus on objects (closer)
-metric
Divergence: farther
Pictorial info
largely monocular cues that can be used by one eye and when the object is static
Types of monocular cues
Occlusion: one object blocks another - non-metric
Linear perspective: lines that are parallel and move away will converge (road)
Texture gradient: textures closer will be larger than textures far away
Familiar size: used for objects whose size is known - metric
Relative size: how the size of object compares to other objects in the scene - relative metric
Relative height: more distant object = closer to horizon (higher) - relative metric
Aerial perspective: scattering light, objects in distant have blue tint and are blurry/fuzzy
What is metric cues
physical units (horse is 20 feet away)
Relative metric:
can only be specified in terms of ratios between depths of diff points in scene (horse is 2x farther)
Non-metric
can only specify depth relative to another object as being closer, farther, or same depth (horse is farther away)
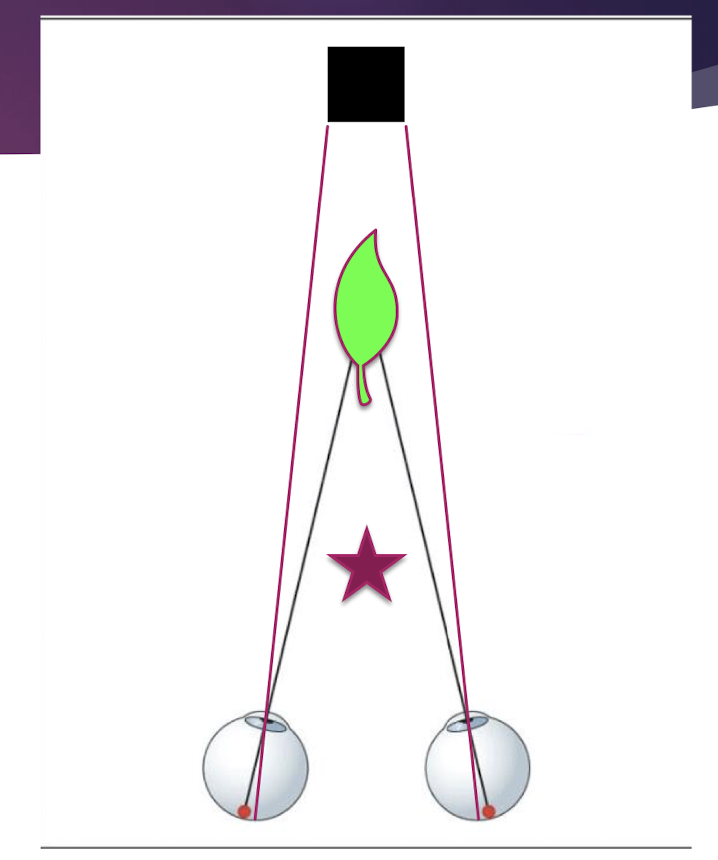
Generic viewpoint
most viewpoints - unconscious inference (what makes most sense duhhh)
Accidental viewpoints:
viewpoints that provide a percept but are not generally representative of the structure of a scene (Wouldn’t exist from any other position)
Bayes Law
showing how prior beliefs combine with data likelihood to form a more accurate "posterior" probability
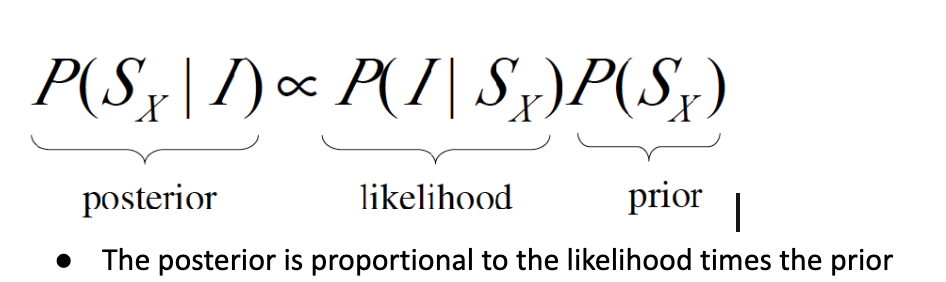
Parts of the Bayes Law probability
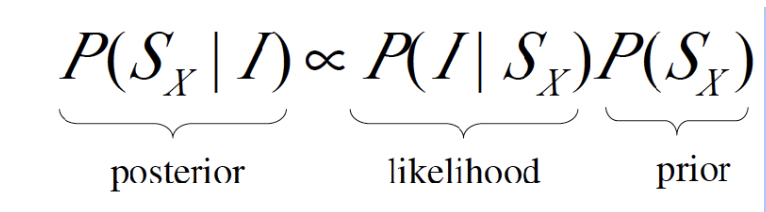
Likelihood: probability that you will see the image given a particular scene is present (is viewpoint generic or accidental)
Prior: probability that a particular scene occurs at all (giant penny)
Posterior: solution to equation, probability that a scene is present in the real world
Bayesian processing
nervous system chooses scene that has highest probability using sensory evidence and prior knowledge of the world
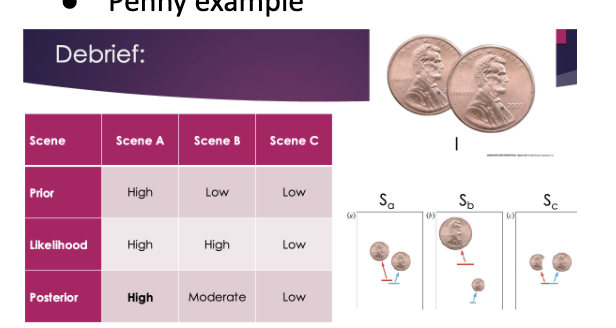
Penny Example
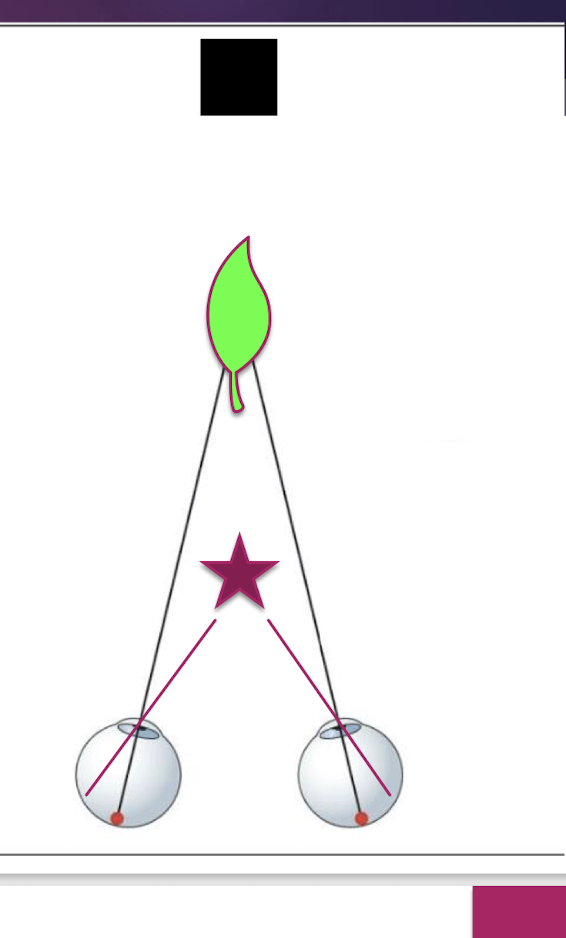
Uncrossed disparity:
occur for objects thart are beyond the horpoter
-image is more medial(towards the midline) on borth retinas compared to an object in the same direction from the viewer
-qaure in the image
First order motion
clear luminace marked edges on an object that help you detect motion
-stepping feet illusion, beta motion, phi motion
Second order motion
motion where you don’t have that edge- you need changes in the surface texture of two surfaces to spot the motion( video example)