laborator
0.0(0)
Card Sorting
1/9
There's no tags or description
Looks like no tags are added yet.
Study Analytics
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
10 Terms
1
New cards
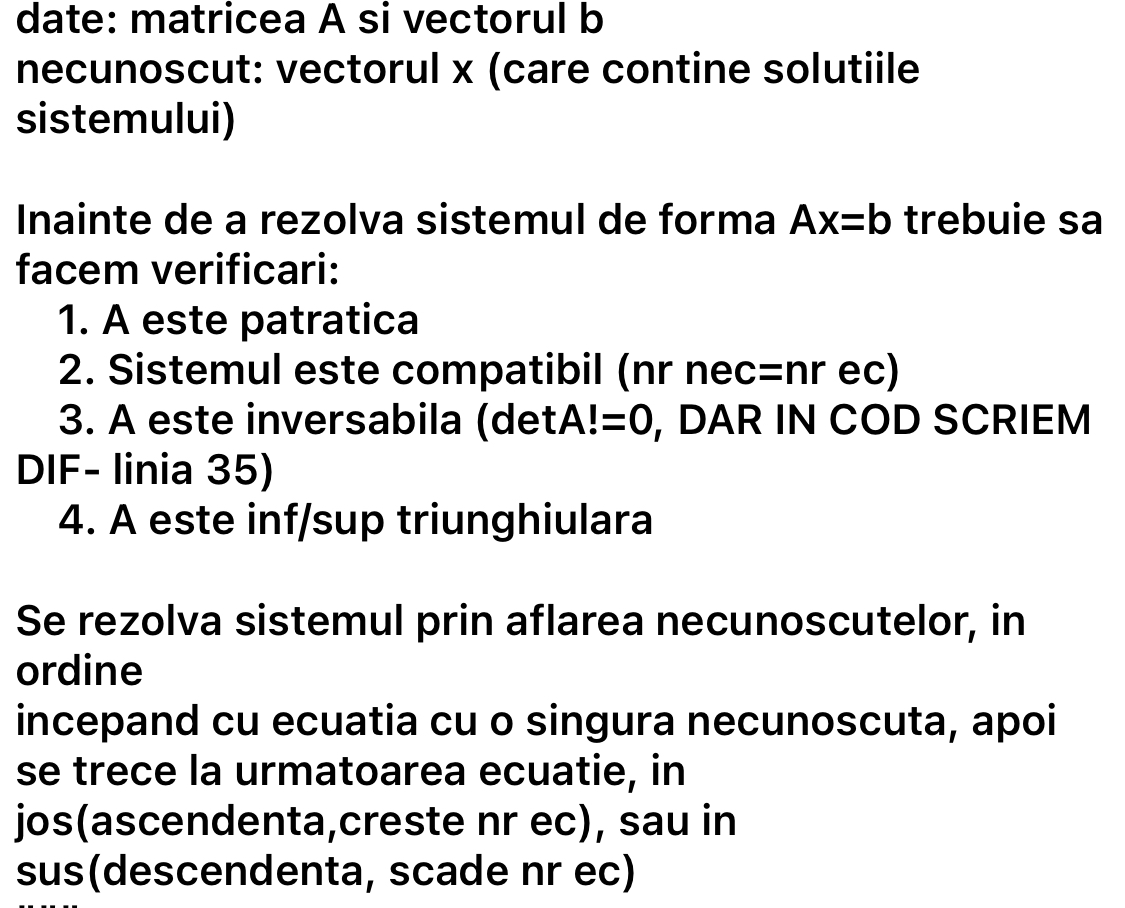
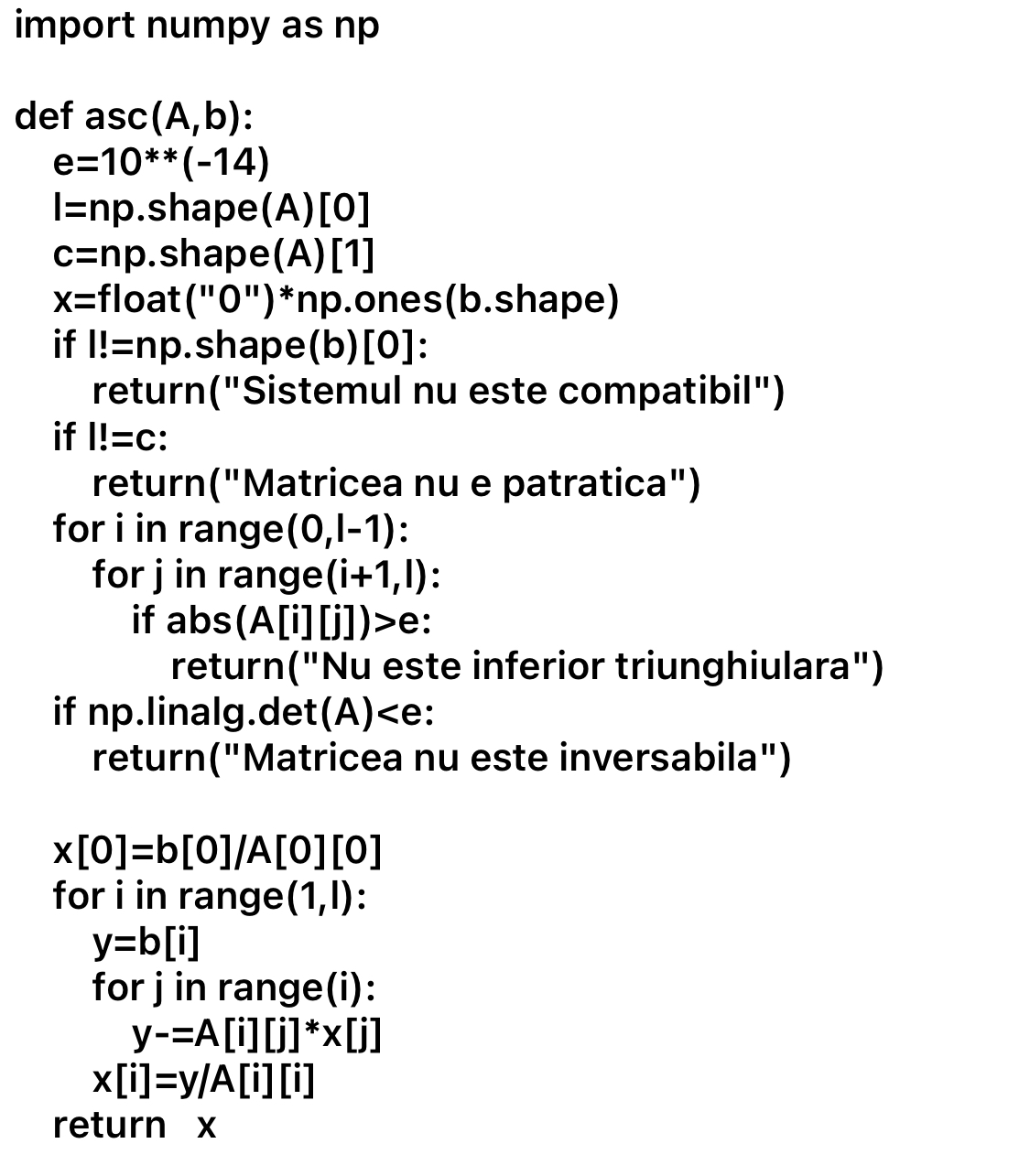
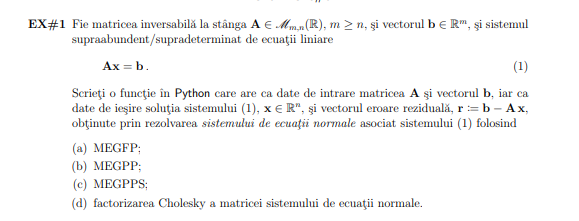
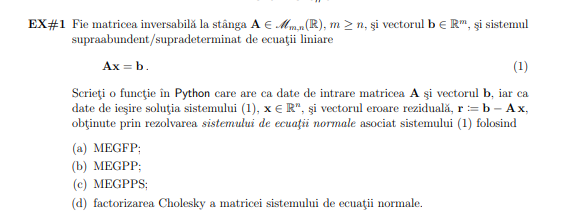
verificari + metoda substitutii ascendente
2
New cards
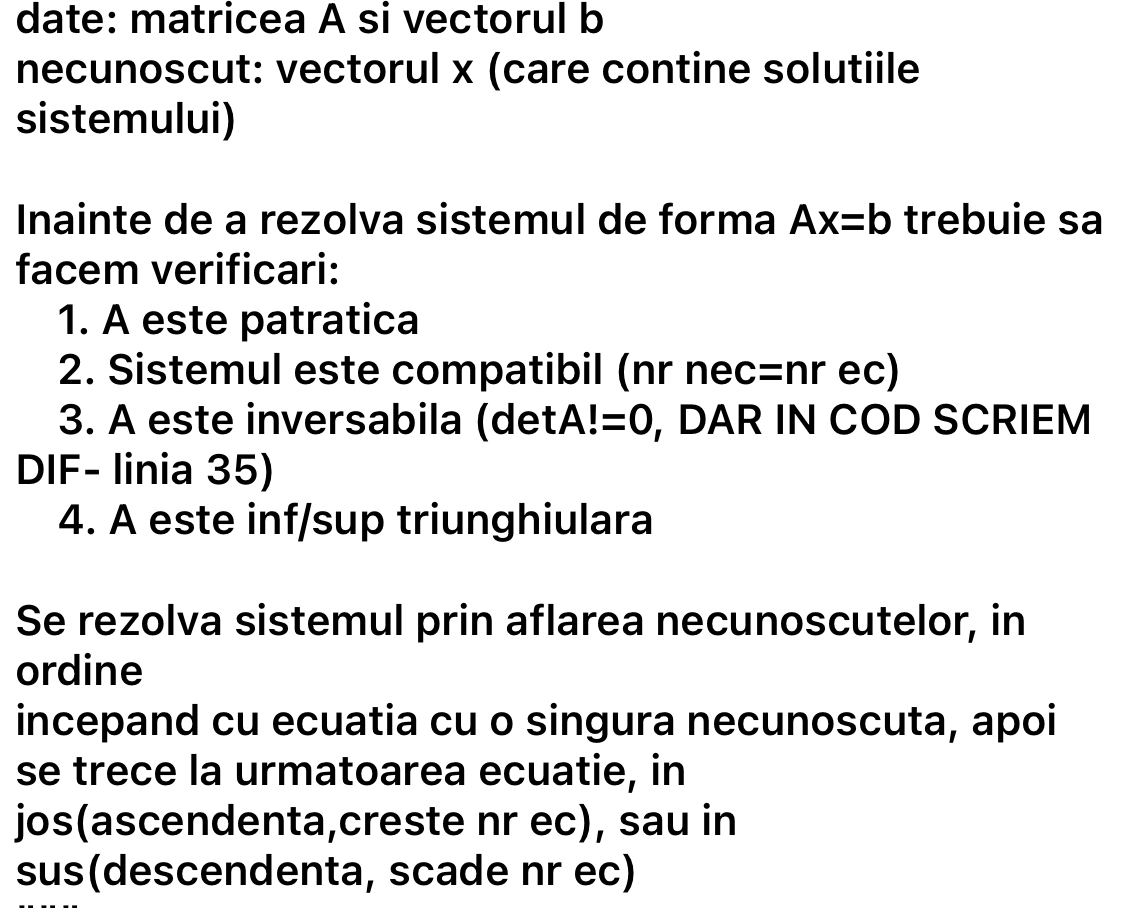
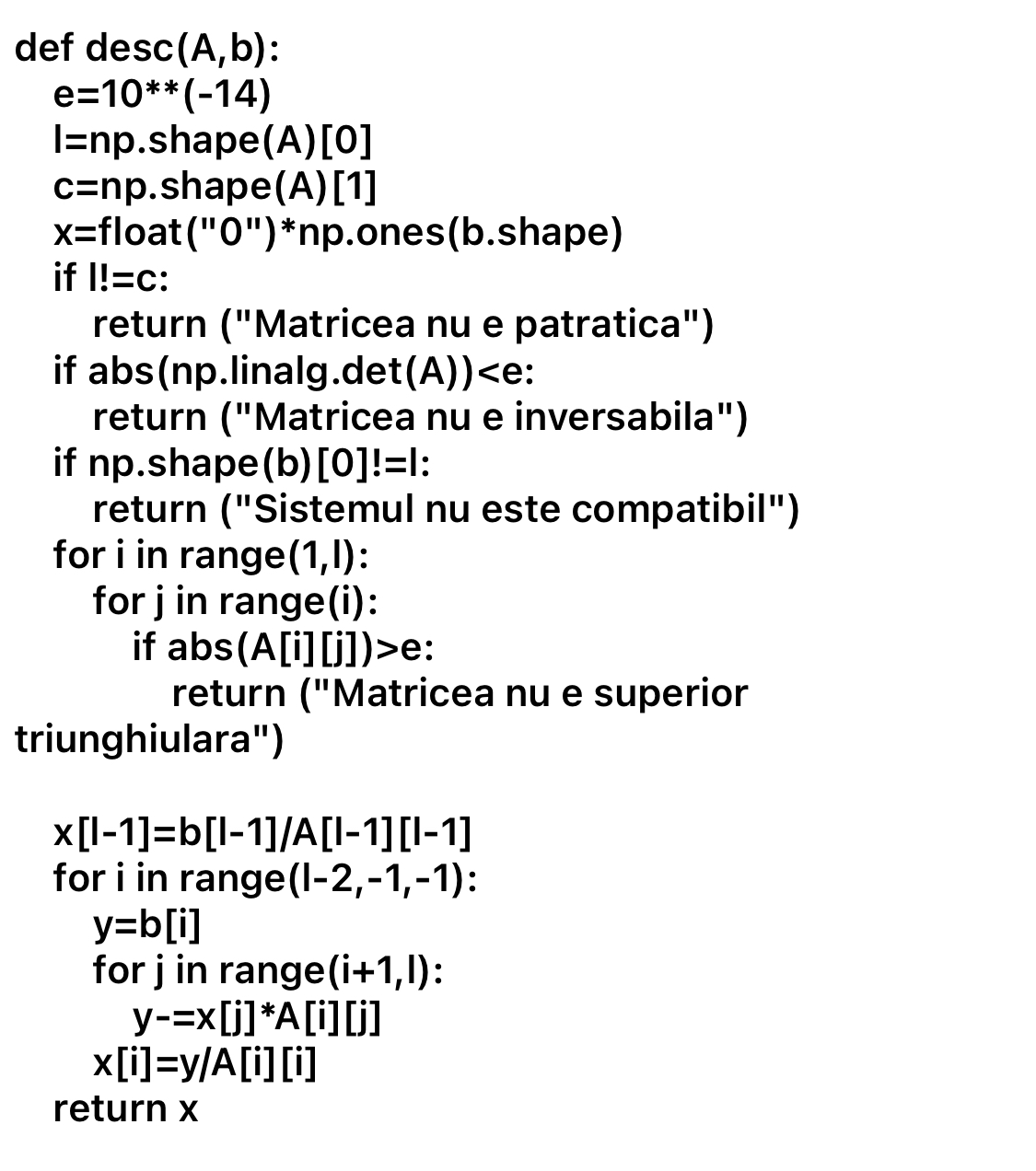
verificari + metoda substitutiei descendente
3
New cards
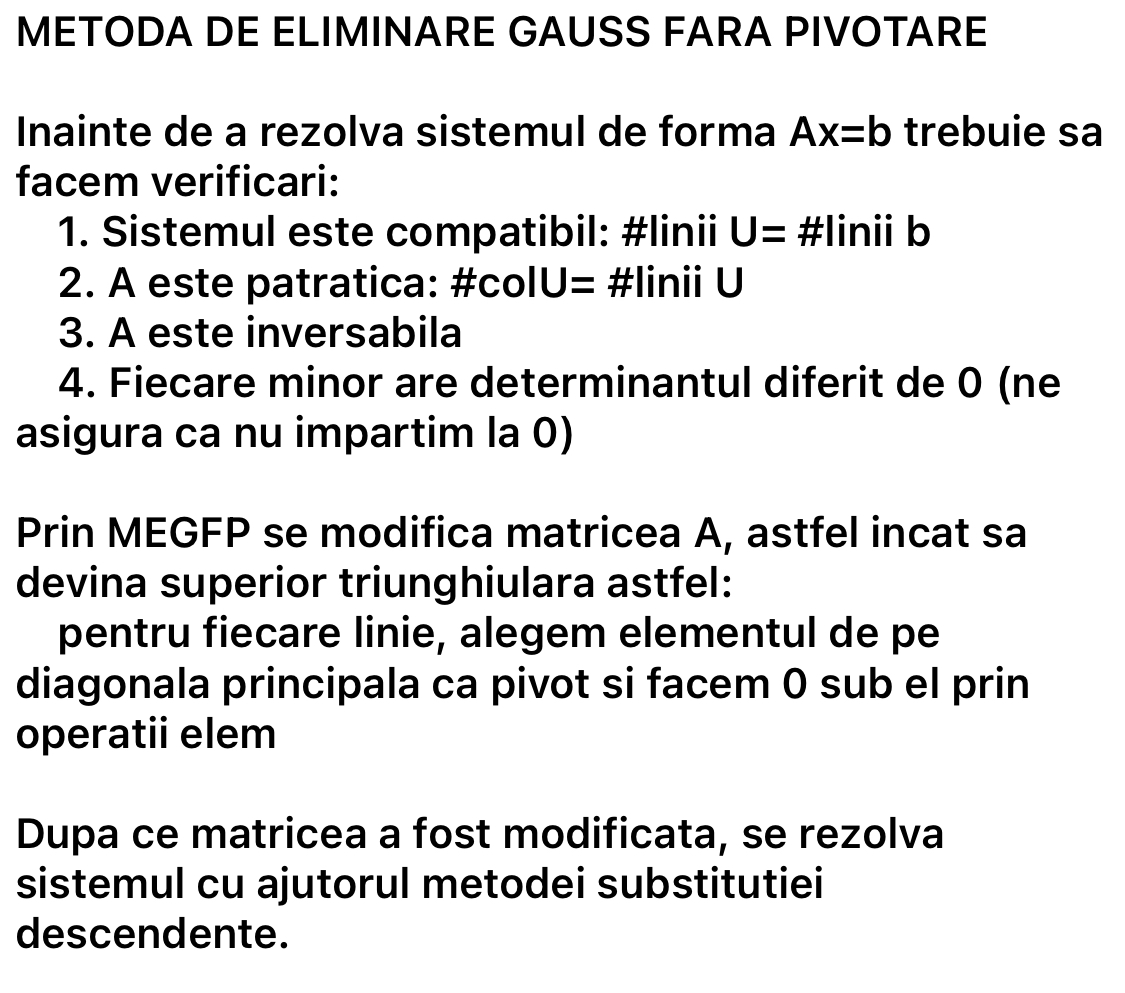
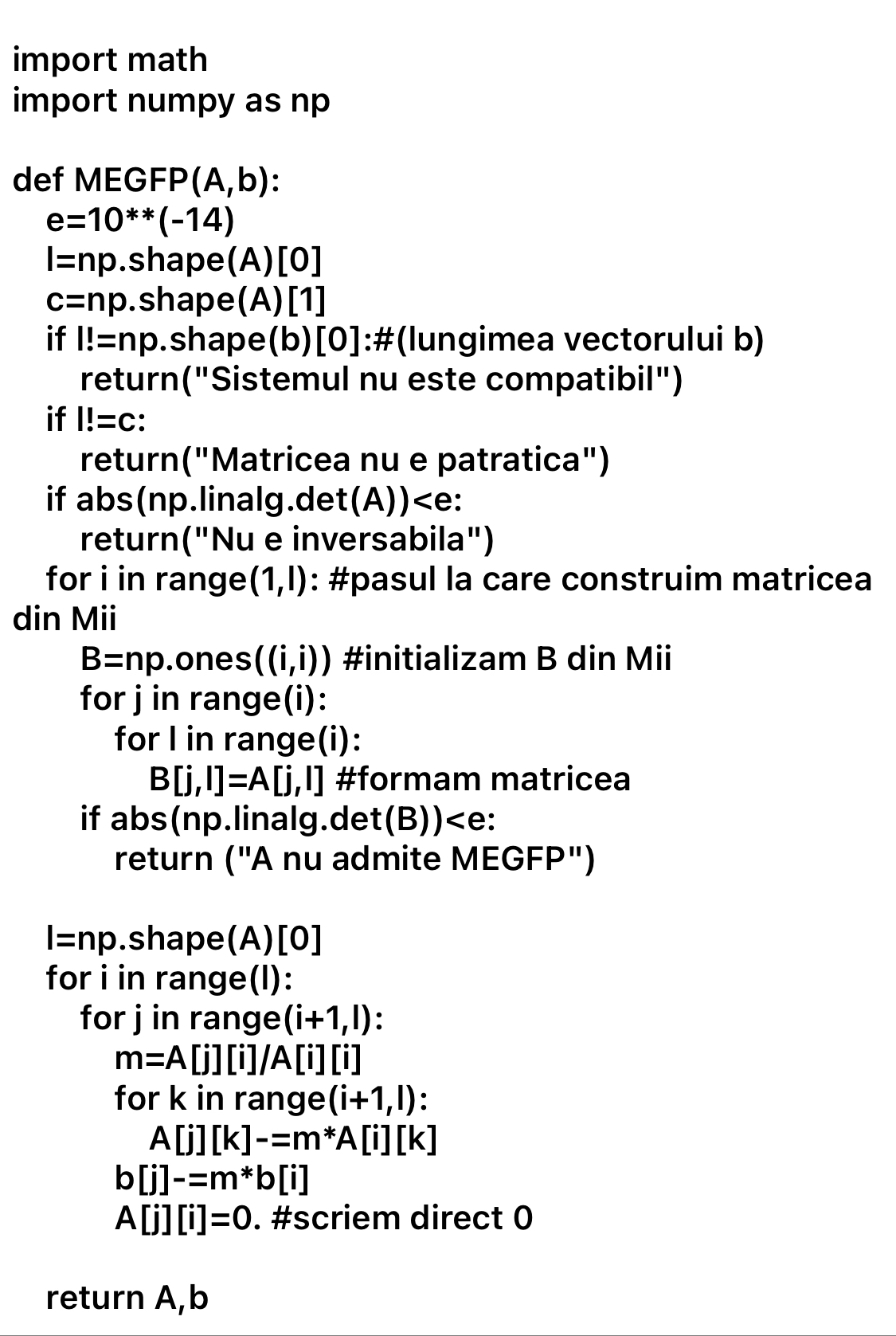
MEGFP functie python
4
New cards
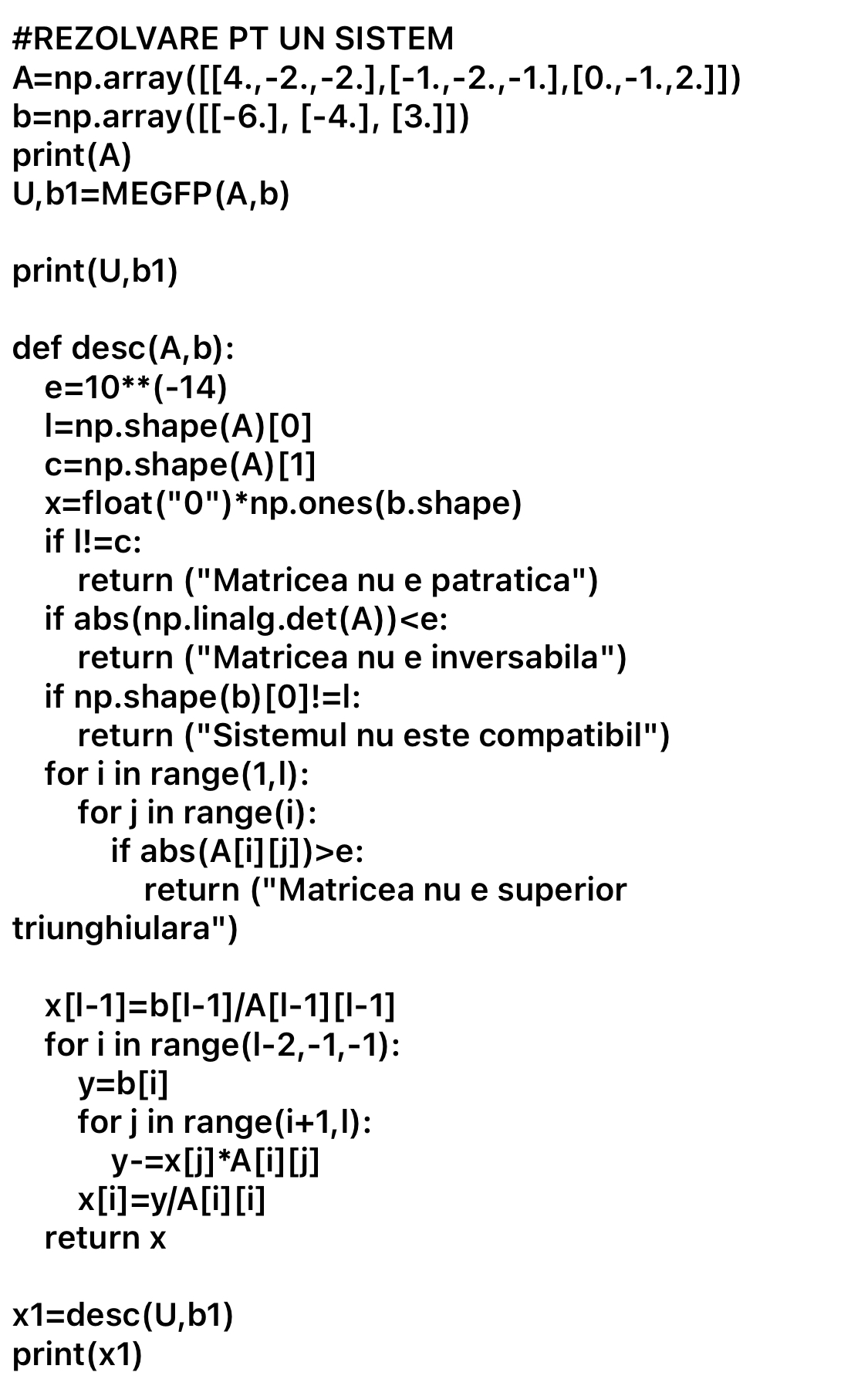
MEGFP implementate pentru un sistem (cu metoda descendenta)
5
New cards
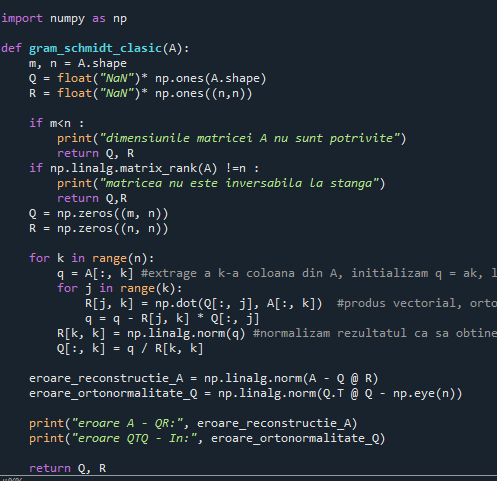
factorizare QR gram schmidt clasica algoritm python
6
New cards

rezolvare ecuatii normale sistem supradeterminat (m>=n) folosind MEGFP + vector eroare reziduala
import numpy as np
def MEGFP(A, b):
eps = 10**-14
m, n = np.shape(A)
if m != n:
raise ValueError("Matricea A nu este patratica.")
if b.shape[0] != m:
raise ValueError("Matricea A nu este compatibila cu vectorul b.")
A = A.copy().astype(float)
b = b.copy().astype(float)
for k in range(n-1):
for i in range(k+1,n):
if A[k,k]==0 :
raise ZeroDivisionError("Pivot nul")
pivot = A[i,k]/A[k,k]
A[i,k:]-=pivot*A[k,k:]
b[i]-=pivot*b[k]
return A, b
def desc(U,y):
n=np.shape(y)[0]
if U.shape[0] != U.shape[1]:
raise ValueError("Matricea U nu este patratica.")
if U.shape[0] != y.shape[0]:
raise ValueError("Vectorul y nu este compatibil cu matricea U.")
x= np.zeros(n)
for i in reversed(range(n)):
if U[i,i] == 0 :
raise ZeroDivisionError("Zero pe diagonala in substitutia descendenta")
suma = 0
for j in range(i + 1, n):
suma += U[i, j] * x[j]
x[i] = (y[i] - suma) / U[i, i]
return x
def rez_ec_normale_MEGFP(A, b):
m, n = A.shape
if m < n:
raise ValueError("Matricea A trebuie sa aiba m >=n.")
if np.linalg.matrix_rank(A) < n:
raise ValueError("Matricea A nu este inversabila la stanga.")
if A.shape[0] != b.shape[0]:
raise ValueError("Matricea A si vectorul b nu au acelasi numar de linii.")
AtA = A.T @ A
Atb = A.T @ b
U,y = MEGFP(AtA,Atb)
x= desc(U,y)
eroare_reziduala = b - A @ x
norma_eroare_reziduala = (eroare_reziduala**2).sum()**0.5
return x, norma_eroare_reziduala7
New cards
rezolvare ecuatii normale sistem supradeterminat (m>=n) folosind MEGPP + vector eroare reziduala
import numpy as np
def MEGPP(A, b):
eps = 1e-14
m, n = np.shape(A)
if m != n:
raise ValueError("Matricea A nu este patratica.")
if b.shape[0] != m:
raise ValueError("Matricea A nu este compatibila cu vectorul b.")
A = A.copy().astype(float)
b = b.copy().astype(float)
for k in range(n - 1): # cautam pivotul maxim pe coloana k
max_val = abs(A[k, k])
max_row = k
for i in range(k + 1, n):
if abs(A[i, k]) > max_val:
max_val = abs(A[i, k])
max_row = i
if abs(A[max_row, k]) < eps:
raise ZeroDivisionError(f"Pivot nul la coloana {k}")
if max_row != k:
A[[k, max_row]] = A[[max_row, k]]
b[k], b[max_row] = b[max_row], b[k]
for i in range(k + 1, n):
pivot = A[i, k] / A[k, k]
A[i, k:] -= pivot * A[k, k:]
b[i] -= pivot * b[k]
return A, b
def desc(U,y):
n=np.shape(y)[0]
if U.shape[0] != U.shape[1]:
raise ValueError("Matricea U nu este patratica.")
if U.shape[0] != y.shape[0]:
raise ValueError("Vectorul y nu este compatibil cu matricea U.")
x= np.zeros(n)
for i in reversed(range(n)):
if U[i,i] == 0 :
raise ZeroDivisionError("Zero pe diagonala in substitutia descendenta")
suma = 0
for j in range(i + 1, n):
suma += U[i, j] * x[j]
x[i] = (y[i] - suma) / U[i, i]
return x
def rez_ec_normale_MEGPP(A, b):
m, n = A.shape
if m < n:
raise ValueError("Matricea A trebuie sa aiba m >=n.")
if np.linalg.matrix_rank(A) < n:
raise ValueError("Matricea A nu este inversabila la stanga.")
if A.shape[0] != b.shape[0]:
raise ValueError("Matricea A si vectorul b nu au acelasi numar de linii.")
AtA = A.T @ A
Atb = A.T @ b
U,y = MEGPP(AtA,Atb)
x= desc(U,y)
eroare_reziduala = b - A @ x
norma_eroare_reziduala = (eroare_reziduala**2).sum()**0.5
return x, norma_eroare_reziduala8
New cards
rezolvare ecuatii normale sistem supradeterminat (m>=n) folosing MEGPPS + vector eroare reziduala
import numpy as np
def MEGPPS(A, b):
eps = 1e-14
m, n = np.shape(A)
if m != n:
raise ValueError("Matricea A nu este patratica.")
if b.shape[0] != m:
raise ValueError("Matricea A nu este compatibila cu vectorul b.")
A = A.copy().astype(float)
b = b.copy().astype(float)
s = np.zeros(m)
for i in range(m):
val_max = 0
for j in range(n):
if abs(A[i, j]) > val_max:
val_max = abs(A[i, j])
s[i] = val_max
if s[i] == 0:
raise ValueError(f"Linia {i} este nulă – nu se poate scala.")
for k in range(n - 1):
cat_max = 0
linie_pivot = k
for i in range(k, n):
cat = abs(A[i, k]) / s[i]
if cat > cat_max:
cat_max = cat
linie_pivot = i
if abs(A[linie_pivot, k]) < eps:
raise ZeroDivisionError(f"Pivot nul la coloana {k}")
if linie_pivot != k:
A[[k, linie_pivot]] = A[[linie_pivot, k]]
b[k], b[linie_pivot] = b[linie_pivot], b[k]
s[k], s[linie_pivot] = s[linie_pivot], s[k]
for i in range(k + 1, n):
factor = A[i, k] / A[k, k]
for j in range(k, n):
A[i, j] -= factor * A[k, j]
b[i] -= factor * b[k]
return A, b
def desc(U,y):
n=np.shape(y)[0]
if U.shape[0] != U.shape[1]:
raise ValueError("Matricea U nu este patratica.")
if U.shape[0] != y.shape[0]:
raise ValueError("Vectorul y nu este compatibil cu matricea U.")
x= np.zeros(n)
for i in reversed(range(n)):
if U[i,i] == 0 :
raise ZeroDivisionError("Zero pe diagonala in substitutia descendenta")
suma = 0
for j in range(i + 1, n):
suma += U[i, j] * x[j]
x[i] = (y[i] - suma) / U[i, i]
return x
def rez_ec_normale_MEGPP(A, b):
m, n = A.shape
if m < n:
raise ValueError("Matricea A trebuie sa aiba m >=n.")
if np.linalg.matrix_rank(A) < n:
raise ValueError("Matricea A nu este inversabila la stanga.")
if A.shape[0] != b.shape[0]:
raise ValueError("Matricea A si vectorul b nu au acelasi numar de linii.")
AtA = A.T @ A
Atb = A.T @ b
U,y = MEGPP(AtA,Atb)
x= desc(U,y)
eroare_reziduala = b - A @ x
norma_eroare_reziduala = (eroare_reziduala**2).sum()**0.5
return x, norma_eroare_reziduala9
New cards
rezolvare ecuatii normale sistem supradeterminat (m>=n) folosing cholesky + vector eroare reziduala
import numpy as np
def cholesky(A):
"""
Performs Cholesky decomposition of a symmetric positive definite matrix A.
Returns L such that A = L @ L.T
"""
n = A.shape[0]
L = np.zeros_like(A)
for i in range(n):
for j in range(i + 1):
suma = sum(L[i, k] * L[j, k] for k in range(j))
if i == j:
L[i, j] = np.sqrt(A[i, i] - suma)
else:
L[i, j] = (A[i, j] - suma) / L[j, j]
return L
def substitutie_asc(L, b):
""" Solves Ly = b using forward substitution """
e= 10**-14
l= np.shape(A)[0]
c= np.shape(A)[1]
n = len(b)
y = np.zeros(n)
if l!= n :
raise ValueError("Sistemul nu este compatibil")
if l!= c :
raise ValueError("Matricea A nu este patratica")
for i in range(0,l-1):
for j in range(i+1,l):
if abs(A[i][j])>e:
raise ValueError("Matricea A nu este inferior triunghiulara")
if np.linalg.det(A)< e:
raise ValueError("Matricea A are determinant nul")
for i in range(n):
suma = sum(L[i, j] * y[j] for j in range(i))
y[i] = (b[i] - suma) / L[i, i]
return y
def substitutie_desc(U, y):
""" Solves Ux = y using backward substitution """
e = 10 ** -14
l = np.shape(U)[0]
c = np.shape(U)[1]
n = len(y)
y = np.zeros(n)
if l != n:
raise ValueError("Sistemul nu este compatibil")
if l != c:
raise ValueError("Matricea A nu este patratica")
for i in range(1,l):
for j in range(i):
if abs(A[i][j]) > e:
raise ValueError("Matricea A nu este superior triunghiulara")
if np.linalg.det(A) < e:
raise ValueError("Matricea A are determinant nul")
n = len(y)
x = np.zeros(n)
for i in reversed(range(n)):
suma = sum(U[i, j] * x[j] for j in range(i + 1, n))
x[i] = (y[i] - suma) / U[i, i]
return x
def rez_ec_normale_Cholesky(A, b):
"""
Solves the least squares problem Ax = b using Cholesky factorization.
"""
m, n = A.shape
if m < n:
raise ValueError("Matricea A trebuie sa aiba m ≥ n.")
if np.linalg.matrix_rank(A) < n:
raise ValueError("Matricea A nu este inversabila la stanga.")
if A.shape[0] != b.shape[0]:
raise ValueError("Matricea A si vectorul b nu au acelasi numar de linii.")
AtA = A.T @ A
Atb = A.T @ b
L = cholesky(AtA)
y = substitutie_asc(L, Atb)
x = substitutie_desc(L.T, y)
eroare_reziduala = b - A @ x
norma_eroare = np.sqrt((eroare_reziduala**2).sum())
return x, norma_eroare10
New cards
grafice + metoda celor mai mici patrate
import numpy as np
import matplotlib.pyplot as plt
# === Your Cholesky-based least squares solver (as defined earlier) ===
def cholesky_decomposition(A):
n = A.shape[0]
L = np.zeros_like(A)
for i in range(n):
for j in range(i + 1):
suma = sum(L[i, k] * L[j, k] for k in range(j))
if i == j:
L[i, j] = np.sqrt(A[i, i] - suma)
else:
L[i, j] = (A[i, j] - suma) / L[j, j]
return L
def forward_substitution(L, b):
n = len(b)
y = np.zeros(n)
for i in range(n):
suma = sum(L[i, j] * y[j] for j in range(i))
y[i] = (b[i] - suma) / L[i, i]
return y
def backward_substitution(U, y):
n = len(y)
x = np.zeros(n)
for i in reversed(range(n)):
suma = sum(U[i, j] * x[j] for j in range(i + 1, n))
x[i] = (y[i] - suma) / U[i, i]
return x
def rez_ec_normale_Cholesky(A, b):
m, n = A.shape
if m < n:
raise ValueError("Matricea A trebuie sa aiba m ≥ n.")
if np.linalg.matrix_rank(A) < n:
raise ValueError("Matricea A nu este inversabila la stanga.")
if A.shape[0] != b.shape[0]:
raise ValueError("Matricea A si vectorul b nu au acelasi numar de linii.")
AtA = A.T @ A
Atb = A.T @ b
L = cholesky_decomposition(AtA)
y = forward_substitution(L, Atb)
x = backward_substitution(L.T, y)
residual = b - A @ x
norm = np.sqrt((residual**2).sum())
return x, norm
# === (a) Solve regression line ===
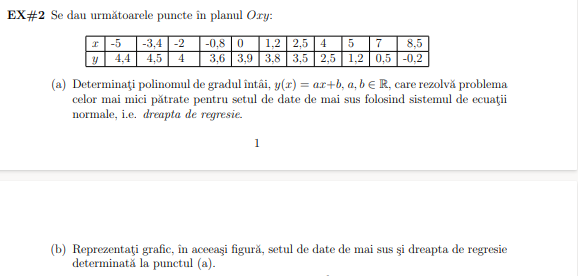
x_data = np.array([-5, -3.4, -2, -0.8, 0, 1.2, 2.5, 4, 5, 7, 8.5])
y_data = np.array([4.4, 4.5, 4, 3.6, 3.9, 3.8, 3.5, 2.5, 1.2, 0.5, -0.2])
# Build A matrix for linear regression y = ax + b
A = np.column_stack((x_data, np.ones_like(x_data)))
b = y_data
coeffs, error = rez_ec_normale_Cholesky(A, b)
a, b_intercept = coeffs
print(f"Regresie: y(x) = {a:.4f}x + {b_intercept:.4f}")
print(f"Norma erorii reziduale: {error:.4f}")
# === (b) Plot regression line and data ===
x_line = np.linspace(min(x_data), max(x_data), 200)
y_line = a * x_line + b_intercept
plt.figure(figsize=(8, 5))
plt.scatter(x_data, y_data, color='blue', label='Puncte date')
plt.plot(x_line, y_line, color='red', label=f'Regresie: y = {a:.2f}x + {b_intercept:.2f}')
plt.title('Regresie liniară prin metoda celor mai mici pătrate')
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
plt.legend()
plt.tight_layout()
plt.show()