Lesson 11 - 16/9/25
1/12
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
13 Terms
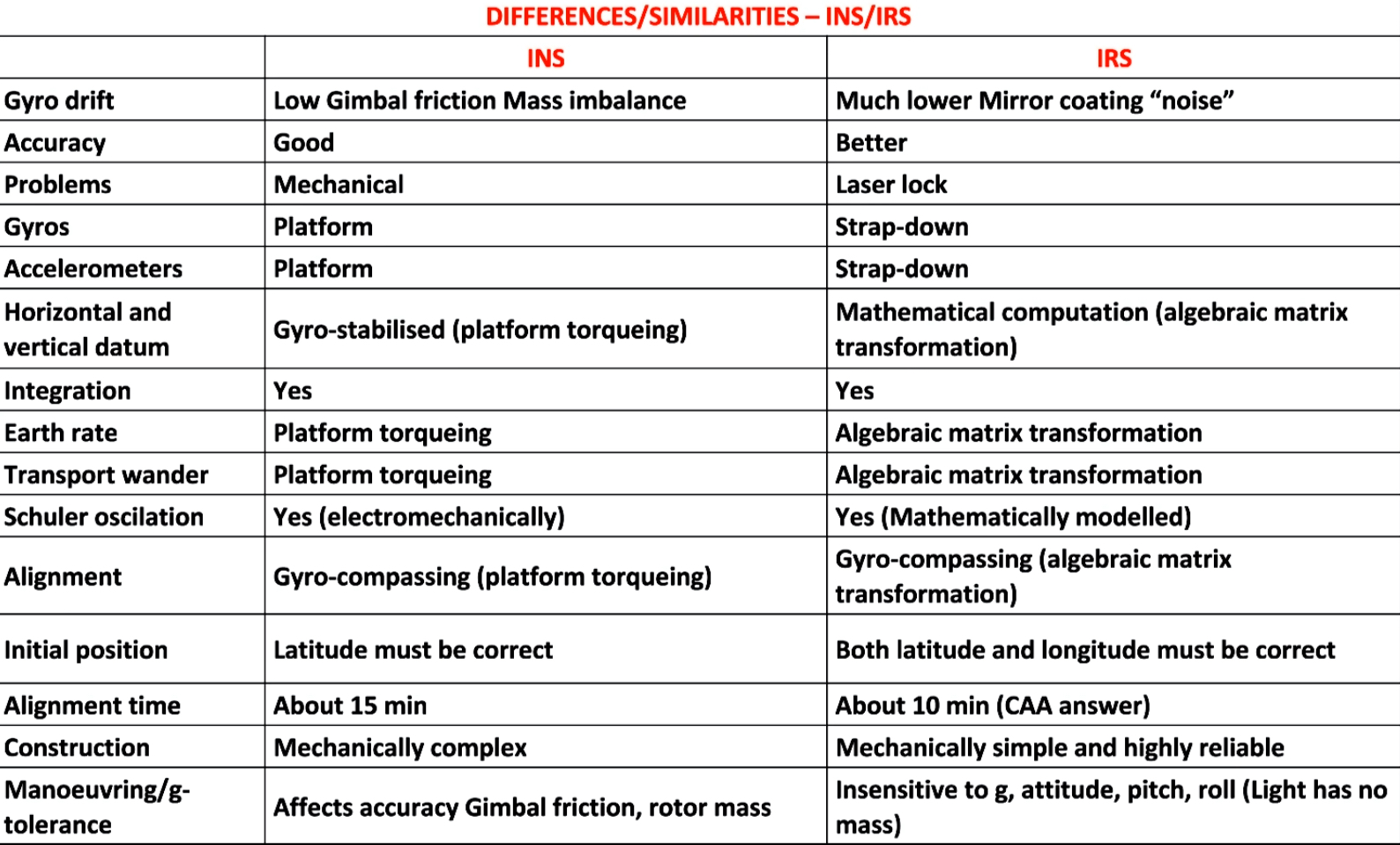
IRS / INS Differences
IRS has better system integration - provides better info to other systems
IRS has better computing power - able to utilise strapdown platform, and computing ability to resolve direction
Doesn’t conduct navigation - only forms data and gives it to FMS to navigate
INS - Stand-alone mechanical system
IRS - Integrated with FMS aircraft with greater computing power
Ring Laser Gyro
Uses monochromatic lasers (of known frequency and wavelength) to measure angular rotation
Angular rotation causes the apparent change in path of the light - change in fringe pattern
Movement of the platform causes a change in frequency and a change in fringe pattern
Peaks are counted by photodiodes
Ring laser gyro advantages/disadvantages
Advantages -
reduced alignment times
Better accuracy
More reliable
Small and lighter
Lower power requirements
Disadvantages -
Dither - Small rates of rotation, tendency for beams to lock onto the same frequency giving zero input, so the gyro is oscillated about its axis (dithering), as the dithering is is equal in both directions, sum over time is zero
Real Wander - even with few mechanical parts for thermal expansion to occur, it still occurs, this can be compensated for
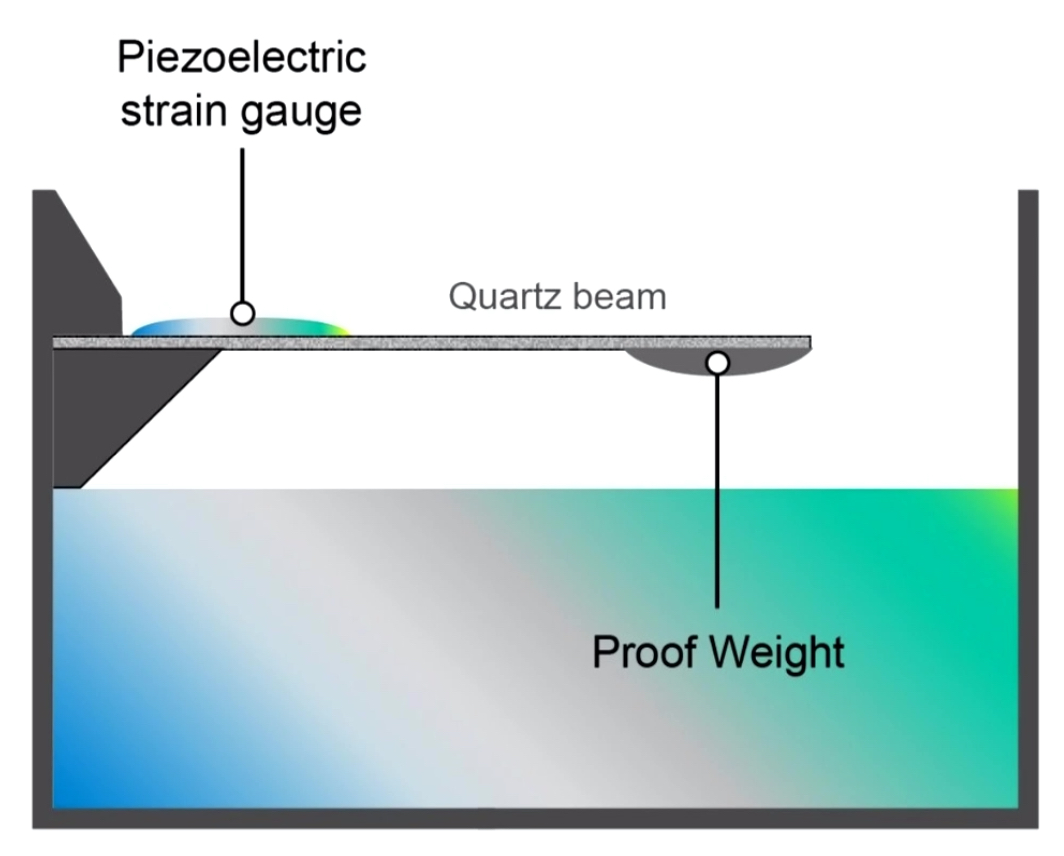
MEMs Accelerometers
Piezoelectrical material = change of shape induces a voltage
Proof weight acts like a pendulum
Quartz beam bends
Changes shape of Piezoelectric strain gauge
Change of shape proportional to acceleration
Induced voltage is proportional to acceleration
IRS Operation
Measures acceleration along 3 axis (aircraft axis) with 3 accelerometers - strapdown system
This is related to longitude/latitude and earths vertical
IRS Initialisation
When stationary on ground
All accelerometers are used to measure gravity and reference the vertical, meaning changes of attitude against a space reference must be coming from earths rotation
The RLGs can use earths rotation to establish true north which is stored in the computer
IRS will then use earths rotation to estimate latitude
Pilot inputs latitude/longitude into FMS/IRS to establish a start point
Initialisation is known as alignment but happens theoretically
IRS alignment takes 5 mins at equator, 10 mins at 70 north, and 17 mins above that
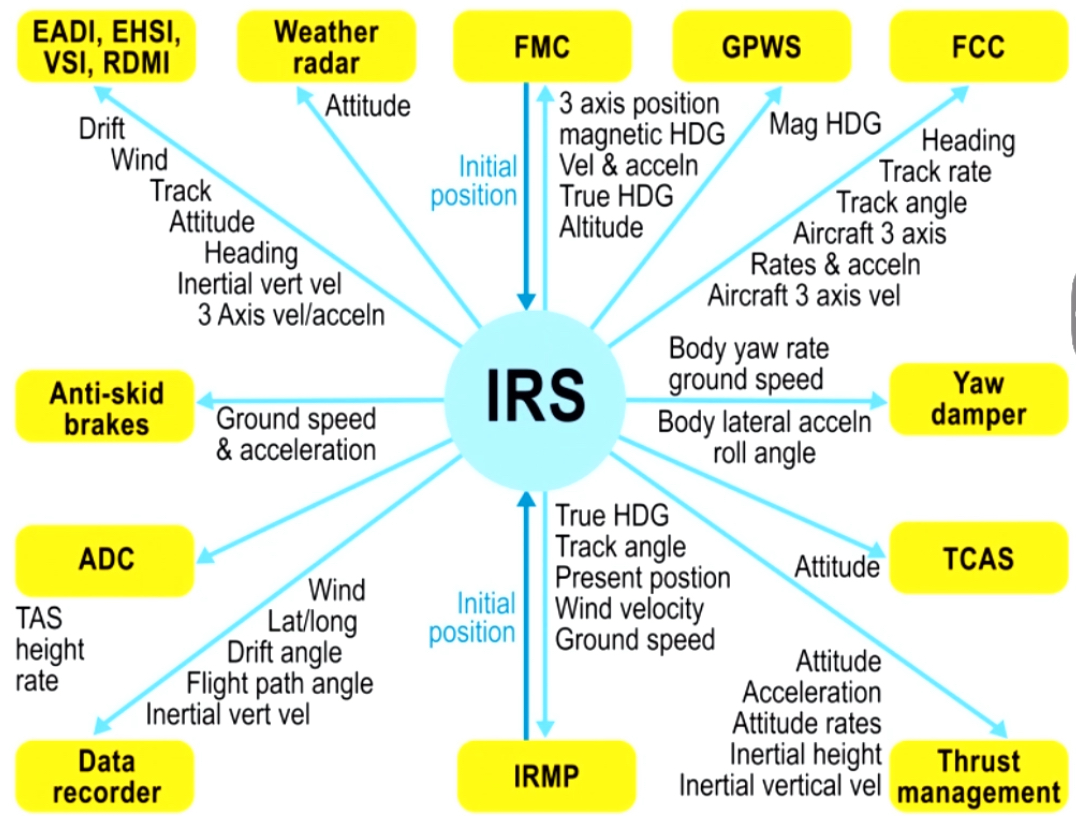
FMS Aircraft Positioning
Methods -
IRS
GNSS
DME
VOR
Localiser
All positions are put through Kalman filter which filters out inaccurate data
If stationary, GS Should be zero in relation to waypoints but may display 1 due to small errors. Big numbers represent a problem
IRS Errors
Coriolis Errors
Earth Rotation Wander
Transport Wander
Schuler error - present even with no physical platform
IRS MSU
Does not have a standby function due to the gyro not needing to spin up
Lights -
Align - (Steady = Alignment in progress, Flashing = alignment can’t be completed, Unlit = alignment completed)
Fault
On DC - Using battery power
DC Fail - No battery power available, only generated AC Power available
ISDU Function
Only used when a FMS failure happens
IRS doesn’t navigate, the FMS does so when it fails, the ISDU is used
IRS Output
Accuracy of IRS = 0.5 NM per hour compared to 1.5 NM per hour for INS
Cannot be interfered from the ground - conflict areas
IRS/INS Differences/Similarities
Air data inertial reference unit - ADIRU
IRS Combined with a ADC - More modern