Inverse Kinematics
1/6
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
7 Terms
Inverse Kinematics answers the question:
Where should the joints be?
What is correct for serial robots?
Inverse Kinematics is derived from Forward Kinematics

A typical step to simplify the solution of the Inverse Kinematics is:
Remove the Tool from the Wrist
Even if an algebraic solution is found for the Inverse Kinematics, it may be invalid because
It is beyond the joints mechanical limits
Regarding Inverse Kinematics, is a closed-form solution faster to compute than iterative methods?
Yes
What is not a typical characteristic of Numerical Iterative methods?
They require a local minimum
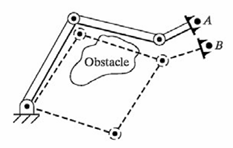
If many Inverse Kinematics solutions exist, one must be chosen. What is relevant?
Avoid collisions, minimize the energy used during motion, minimize the time needed to complete the motion