MTH 267 - Differential Equations Exam 2 Topics
1/56
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
57 Terms
nth-Order Initial-Value Problem (IVP)

Existence of a Unique Solution Theorem
“Let an(x), an-1(x), …, a1(x), a0(x) and g(x) be continuous on an interval I and let for every x in this interval. If is any point in this interval, then a solution of the initial-value problem exists on the interval and is unique.”
Boundary-Value Problem (BVP)
“linear differential equation of order two or greater in which the dependent variable y or its derivatives are specified at different points”
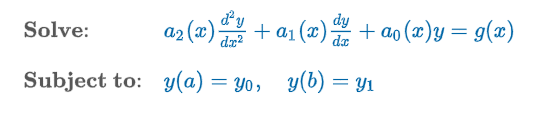
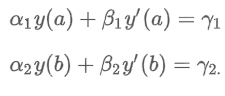
Boundary Conditions (BC)
The prescribed y(a) = y0 values and a y(b) = y1
Homogeneous Equations
Equivalently, L(y) = 0
Note: y = 0 is always a solution of a homogeneous linear equation

Nonhomogeneous Equations
Equivalently, L(y) = g(y)

Differential Operator
transforms a differentiable function into another function
Linearity Property
“L operating on a linear combination of two differentiable functions is the same as the linear combination of L operating on the individual functions”

Superposition Principle
“Let y1, y2, …, yk be solutions of the homogeneous nth-order differential equation on an interval I. Then the linear combination y = c1y1(x) + c2y2(x) + … + ckyk(x) where the ci = 1,2,…, k are arbitrary constants, is also a solution on the interval.”

Superposition Corollaries - Homogeneous Equations
(A) A constant multiple y = c1y1 of a solution y1(x) of a homogeneous linear differential equation is also a solution.
(B) A homogeneous linear differential equation always possesses the trivial solution y = 0.
Linear Dependence/Independence
“A set of functions f1(x), f2(x), …, fn(x) is said to be linearly dependent on an interval I if there exist constants c1, c2, …, cn not all zero, such that c1f1(x) + c2f2(x) + … + cnfn(x) = 0
for every x in the interval. If the set of functions is not linearly dependent on the interval, it is said to be linearly independent.”

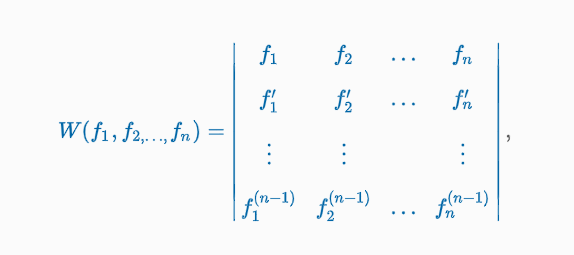
Wronskian
“Suppose each of the functions f1(x), f2(x), …, fn(x) possesses at least n - 1 derivatives. The determinant (Image) where the primes denote derivatives.
Criterion for Linearly Independent Solutions
Let y1, y2, …, yn be n solutions of the homogeneous linear -order differential equation on an interval I. Then the set of solutions is linearly independent on I if and only if W(y1, y2, …, yn) ≠ 0 for every x in the interval.”
Fundamental Set of Solutions
“Any set y1, y2, …, yn of n linearly independent solutions of the homogeneous linear nth-order differential equation on an interval I is said to be a fundamental set of solutions on the interval.”
Existence of a Fundamental Set
“There exists a fundamental set of solutions for the homogeneous linear -order differential equation on an interval I.”
General Solution - Homogeneous
Let y1, y2, …, yn be a fundamental set of solutions of the homogeneous linear -order differential equation on an interval I. Then the general solution of the equation on the interval is y = c1y1(x) + c2y2(x) + … + cnyn(x) where ci, i = 1, 2, …, n are arbitrary constants.”

Particular Solution
Any function yp free of arbitrary parameters
General Solution - Nonhomogeneous Equations
“Let yp be any particular solution of the nonhomogeneous linear nth-order differential equation on an interval I, and let y1, y2, …, yn be a fundamental set of solutions of the associated homogeneous differential equation on I. Then the general solution of the equation on the interval is y = c1y1(x) + c2y2(x) + … + cnyn(x) + yp(x) where the ci, i = 1, 2, …, n are arbitrary constants.”
y = complementary function + any particular solution
y = yc + yp

Complementary Function
y =c1y1(x) + c2y2(x) + … + cnyn(x)
General Solution - Nonhomogeneous
Superposition Principle - Nonhomogeneous
Let yp1, yp2, …, ypk be k particular solutions of the nonhomogeneous linear nth-order differential equation (7) on an interval I corresponding, in turn, to k distinct functions g1, g2, …, gk. That is, suppose yp denotes a particular solution of the corresponding differential equation
an(x)yn + an - 1(x)yn - 1 + … + a1(x)y’ + a0(x)y = gi(x)
where i = 1, 2, …, k. Then
yp(x) = yp1(x) + yp2(x) + … + ypk(x)
is a particular solution of
an(x)yn + an - 1(x)yn - 1 + … + a1(x)y’ + a0(x)y = g1(x) + g2(x) + … + gk(x)
Reduction of Order
If y1 and y2 are linearly independent, then their quotient y2 ∕ y1 is nonconstant on I—that is, y2(x) ∕ y1(x) = u(x) or y2(x) = u(x)y1(x).
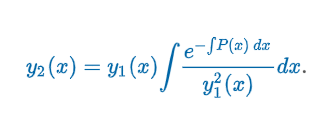
General Case:
“Let y1(x) be a solution of the homogeneous differential equation y″ + P(x)y′ + Q(x)y = 0 on an interval I and that y1(x) ≠ 0 for all x in I. Then (Image) is a second solution.
Wronskian w/ Reduction of Order
If is the y2 solution in the Reduction of Order Formula, then the functions y1(x) and y2(x) are linearly independent on any interval I on which is not zero.

m: solution or root of the 1st degree polynomial equation am + b = 0 (Homogeneous Linear Equations with Constant Coefficients)
If we substitute y = emx & y’ = memx into ay’+ by = 0, we get
amemx + bemx = 0 or emx(am + b) = 0

Auxiliary Equation (Homogeneous Linear Equations with Constant Coefficients)
Homogeneous 2nd-order DE : ay” + by’ + cy = 0 where a, b, & c are constants
Subsitute y = emx, y’ = memx, y” = m2emx
New Equation: am2emx + bmemx + cemx = 0 or emx (am2 + bm + c) = 0
m : root of the quadratic equation
Auxiliary Equation: am2 + bm + c = 0
m1 & m2 real & distinct (b2 - 4ac > 0),
m1 & m2 real & equal (b2 - 4ac = 0), &
m1 & m2 conjugate complex numbers (b2 - 4ac < 0)

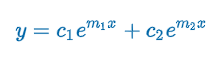
Case 1: Distinct Real Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 real & distinct (b2 - 4ac > 0)
am2 + bm + c = 0 has 2 real unequal roots m1 & m2 → linearly independent y1 = em1x & y2 = em2x
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)
y = c1em1x + c2em2x
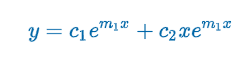
Case 2: Repeated Real Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 real & equal (b2 - 4ac = 0)
m1 = m2 → y1 = em1x & b2 - 4ac = 0 → m1 = -b/2a
Proof: y2 = em1x∫(e2m1x/e2m1x)dx = em1x∫dx = xem1x
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)
m1 = m2 = -b/2a
y = c1em1x + c2em1x
Case 3: Conjugate Complex Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 conjugate complex numbers (b2 - 4ac < 0)
m1 & m2 are complex → m1 = α + iβ & m2 = α - iβ were α & β > 0 are real & i2 = -1
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)

Equation 1 Worth Knowing (Homogeneous Linear Equations with Constant Coefficients)
k: real
DE: y” + k2y = 0
Auxiliary Equation: m2 + k2 = 0
Roots: m1 = ki & m2 = -ki
Solution: y = c1coskx + c2sinkx
Equation 2 Worth Knowing (Homogeneous Linear Equations with Constant Coefficients)
k: real
DE: y” - k2y = 0
Auxiliary Equation: m2 - k2 = 0
Roots: m1 = k & m2 = -k
Solution: y = c1ekx+ c2e-kx
Special Case: c1 = c2 = ½ → y = 1/2(ekx + e-kx) = coshkx
Special Case: c1 = ½ & c2 = -½ → y = 1/2(ekx - e-kx) = sinhkx
Alternative form: y = c1coshkx + c2sinhkx
Higher-Order Equations (Homogeneous Linear Equations with Constant Coefficients)
Repeated Complex Roots (Homogeneous Linear Equations with Constant Coefficients)
m1 = α + iβ, β > 0 is a complex root of multiplicity k of an auxiliary equation w/ real coefficients, then its conjugate m2 = α + iβ, β > 0 is also a complex root of multiplicity k

Rational Roots (Homogeneous Linear Equations with Constant Coefficients)
We know that if m1 = p ∕ q is a rational root (expressed in lowest terms) of a polynomial equation anmn + … +anm +a0 = 0 with integer coefficients, then the integer p is a factor of the constant term a0 and the integer q is a factor of the leading coefficient an.
Nonhomogeneous General Solution
General Solution: y = yc + yp
yc : complementary function; general solution of the associated homogeneous DE
yp :any particular solution of the nonhomogeneous equation
Method of Undetermined Coefficients
Limited to linear DEs such as nonhomogeneous linear DE where
the coefficients ai, i = 0, 1, …, n are constants &
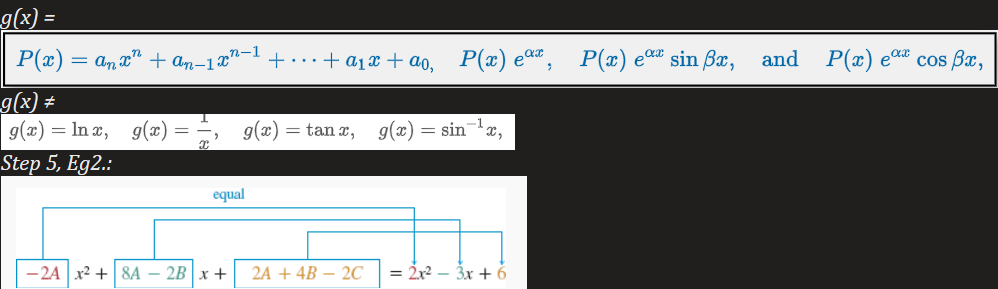
g(x) is a constant k, a polynomial function, an exponential function eαx, a sine or cosine function sinβx or cosβx, or finite sums and products of these functions. (Refer to image to what this means)
Steps:
1) Find yh
Characteristic Equation
Identify type of Homogeneous Linear Equations with Constant Coefficient
2) Choose a general yp
Look at RHS, the equation will include RHS & it’s derivatives
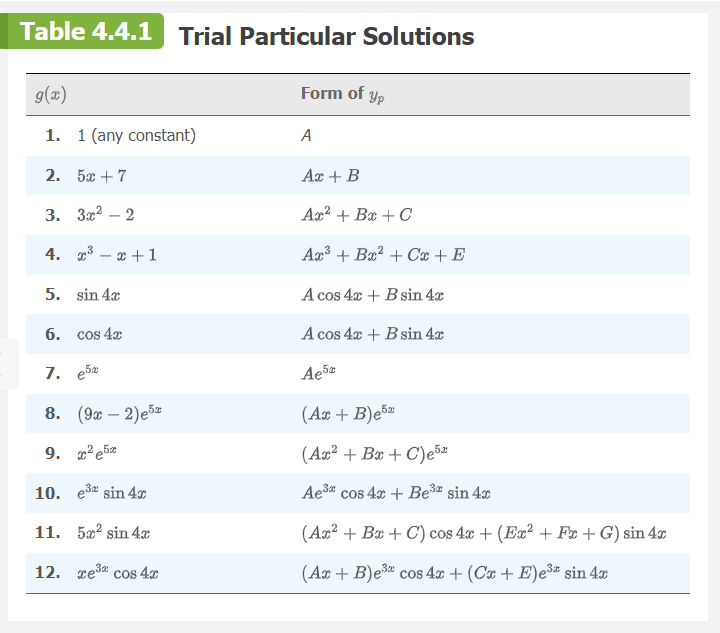
Refer to Trial Particular Solutions Flashcard
Eg. RHS = 3x2 → Ax2 + Bx + C = 0
3) Derive the general yp
4) Plug the derivatives into the DE
5) Match elements in LHS w/ elements in RHS
Eg1. LHS = 2A - 4Ax2 - 4Bx + 4C; RHS = 3x2 + 0x +1 → 2A + 4C = 0, -4B = 0, -4A = 3
Eg2. Refer to Image
Solve
6) Plug into yp
7) Write y = yh + yp
8) Check by plugging solution into DE
Superposition Principle for Nonhomogeneous Equations
yp = yp1 + yp2 +…+ ypn
(Apply this theorem when g(x) is a combination of allowable functions)
Case 1
No function in the assumed particular solution is a solution of the associated homogeneous differential equation.
The form of yp is a linear combination of all linearly independent functions that are generated by repeated differentiations of g(x).
Case 2:
A function in the assumed particular solution is also a solution of the associated homogeneous differential equation.
Linear 1st-Order Revisited
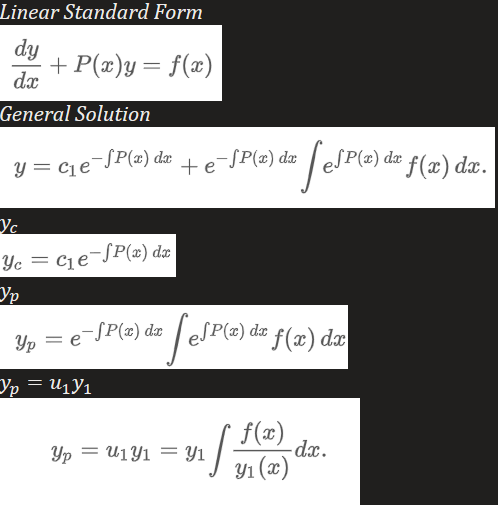
Linear 1st-Order (Possible Exam Question)
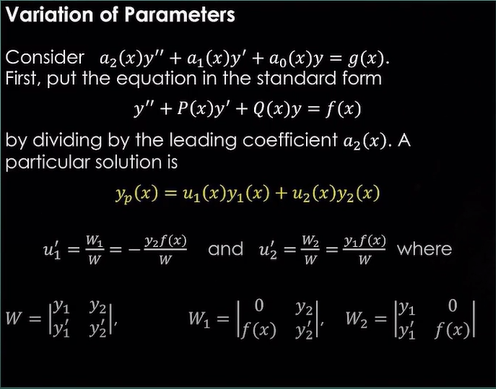
Variation of Parameters
Note: do not need to introduce new constants, solution method may involved integral-defined functions, particular solution may not be unique
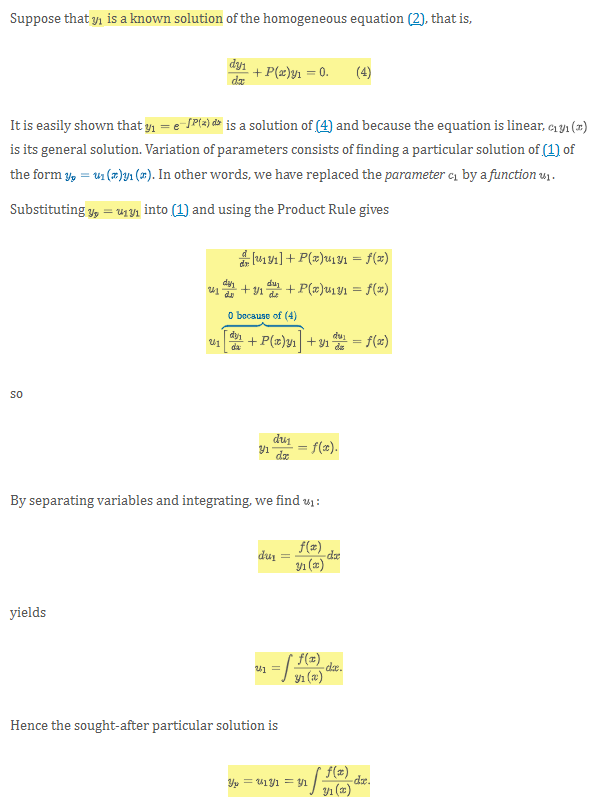
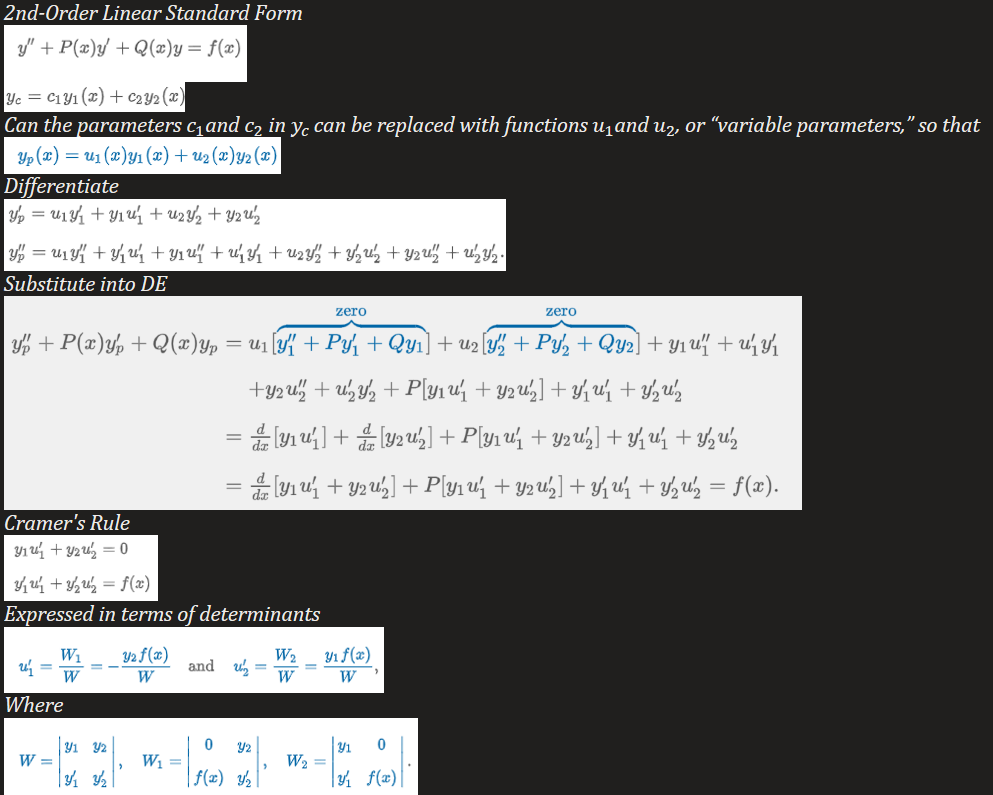
Variation of Parameters Proof of Linear 2nd-Order (Possible Exam Question)
Note: can be generalized to linear nth-order equations that have been put into standard form
Linear Dynamical System
y(0) = y0 & y’(0) = y1: Initial Conditions w/ t=time
g(t): Driving function/Forcing Function/Input
Solution y(t): Response/Output

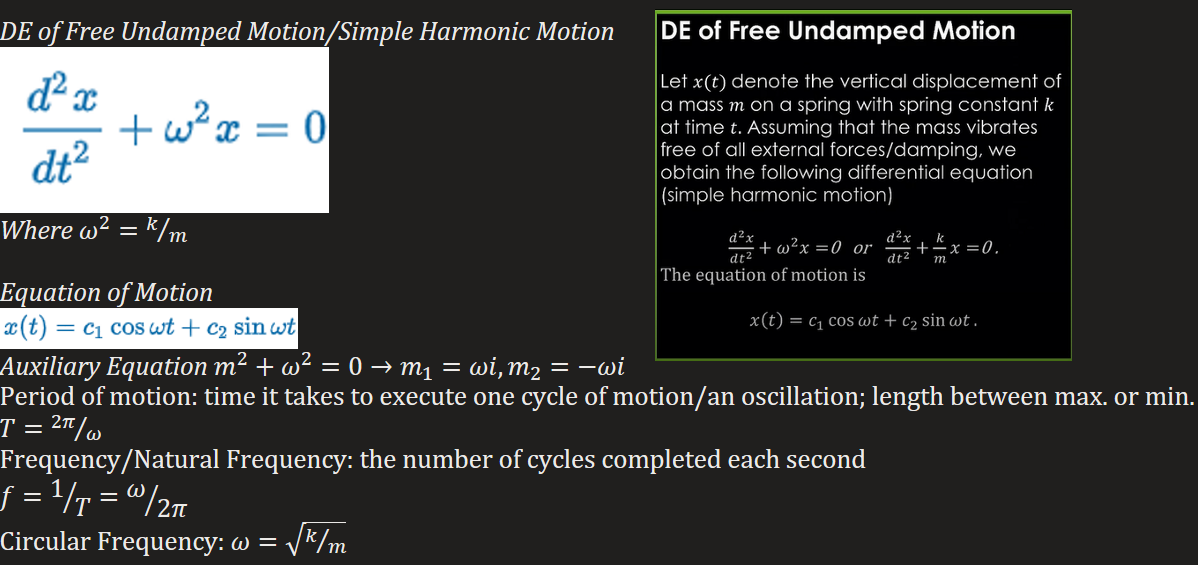
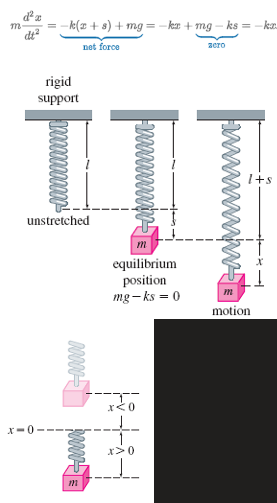
Spring/Mass System: Free Undamped Motion
Hooke’s law
“spring exerts a restoring force F opposite to the direction of elongation and proportional to the amount of elongation s”
k > 0: constant of proportionality called the spring constant or stiffness of the spring
Newton’s 2nd Law
m(d2x/dt) = -k(x + s) + mg = -kx +mg - ks = -kx
F1 = -k(x+s) : restoring force
W = mg: Weight = mass*acceleration
mg = ks or mg -ks = 0: condition of equilibrium (stretched- elongation/compression)
x(t): displacement where x = 0 is the equilibrium position, above is negative, below is positive
F = ma: Force = mass* acceleration
a = d2x/dt2: acceleration
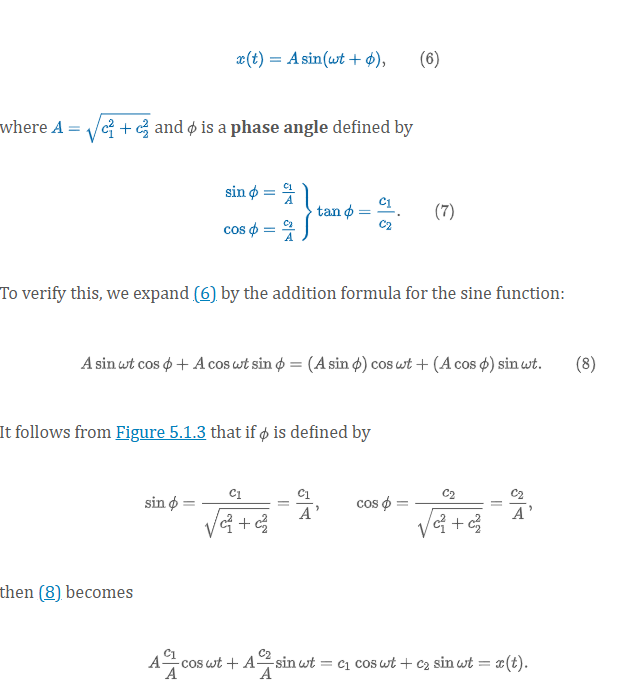
Free Undamped Motion - Alternative Form of x(t)
amplitude A
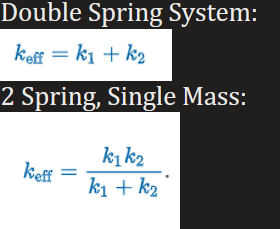
Effective Spring Constant
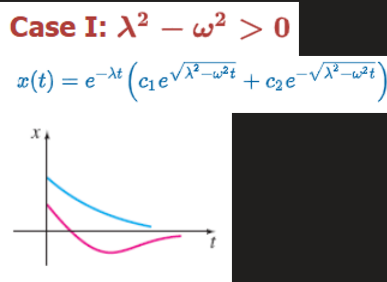
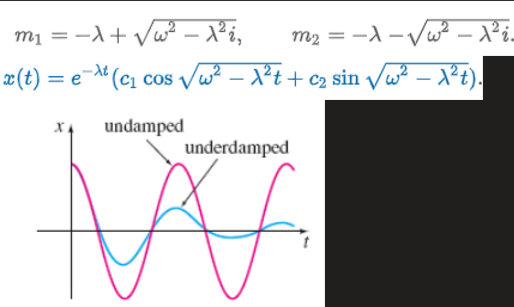
Spring/Mass Systems: DE of Free Damped Motion
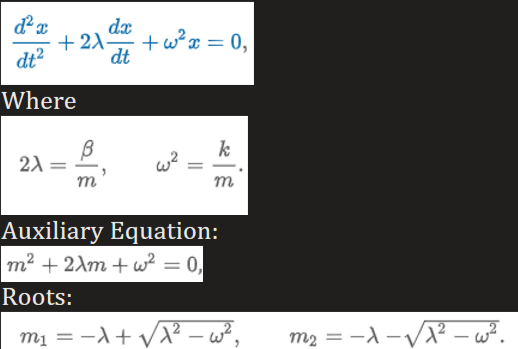
Case 1: Overdamped
Case 2: Critically Damped

Case 3: Underdamped
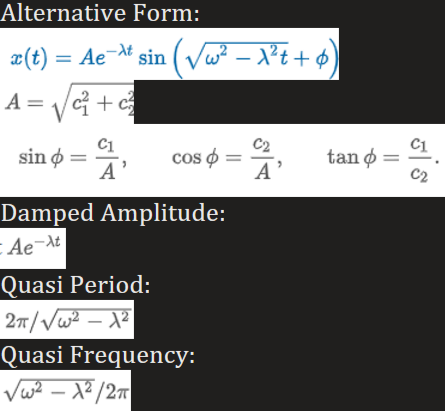
Free Damped Motion - Alternative Form of x(t)
amplitude A
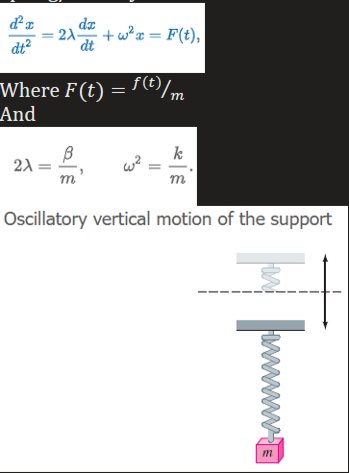
Spring/Mass Systems: Driven Motion with Damping
Take into consideration an external force f(t) acting on a vibrating mass on a spring.
Note: when F is a periodic function, it is considered a transient term; in other word, yc = transient term, yp = steady-state term

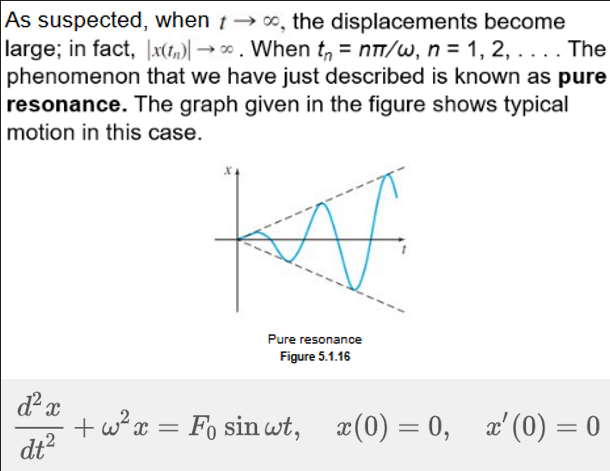
Spring/Mass Systems: Driven Motion without Damping
With a periodic impressed force and no damping force, thereis no transient term in the solution of a problem.
Pure Resonance
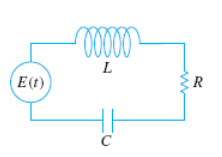
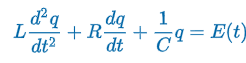
LRC Series Circuit
“Kirchoff’s 2nd Law states the impressed voltage E(t) in a closed loop equals the sum of the voltage drop.”
E(t) = impressed voltage ~ external force, f(t)
i(t) = current in closed circuit
q(t) = charge incapacitor at time t
L = inductance ~ mass, m
R = Resistance ~ damping constant, b
C = Capacitance ~ spring constant, k
E(t) = 0: electrical vibration of the circuit are free
E(t) > 0: electrical vibrations are forced
R ≠ 0, qc(t) = transient solution, qp(t) = steady-state solution
general solution contains the factor e-Rt/2L
the capacitor is charging and discharging as t→∞ (simple harmonic)
E(t) = 0 & R = 0: undamped, electrical vibrations fo not approach 0 as t increases without bound