Quiz 4
1/14
Earn XP
Description and Tags
Cards 12-15 are the solution to the questions that you need to work out
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
15 Terms
The following matrix:
will not require pivoting when solved by gauss elimination
will require pivoting when solved by gauss elimination
is not diagonally dominant
is diagonally dominant
will require pivoting when solved by gauss elimination
is not diagonally dominant
When factoring the N x N matrix [A] into its upper and lower (LU) factors
Crout’s method set the diagonal elements of [U] equal to one
Doolittle’s method set the diagonal elements of [L] equal to one
Cholesky’s method set the diagonal elements of [U] equal to one
Crout’s method set the diagonal elements of [L] equal to one
is exact for round off error
Cholesky’s method can be applied to any metric [A] regardless of its structure
Crout’s method set the diagonal elements of [U] equal to one
Doolittle’s method set the diagonal elements of [L] equal to one
is exact for round off error
If a set of simultaneous equations [A]{x}={b} is solved by an iterative and [A] is a 400 × 400 metric and if it takes K=10 iterations to converge, the then number of floating point operations taken to find the solution is estimated to be of the order of
1,600,000
Iterative methods of solution for simultaneous equations include
successive over relaxation (SOR)
LU decomposition
Jacobi iteration
Householder decomposition
Gauss-Seidel iteration
successive over relaxation (SOR)
Jacobi iteration
Gauss-Seidel iteration
The LU decomposition method applied to the linear system [A]{x}={b} is (assume that the matrix [A] is fully populated)
is a method that takes O(N3) floating point operations to solve the system of equations for the first right hand side vector [b] and subsequently takes on O(N3) for any new right hand side vector [b]
is an iterative operation
is a direct method of solution
requires finding the lower and upper factors of the matrix [A] by one of three possible choices
is used when the coefficient matrix [A] stays constant and there are multiple right hand sides [b] to solve
is a direct method of solution
is used when the coefficient matrix [A] stays constant and there are multiple right hand sides [b] to solve
requires finding the lower and upper factors of the matrix [A] by one of three possible choices
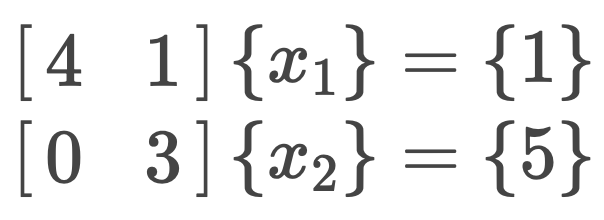
The system of equations
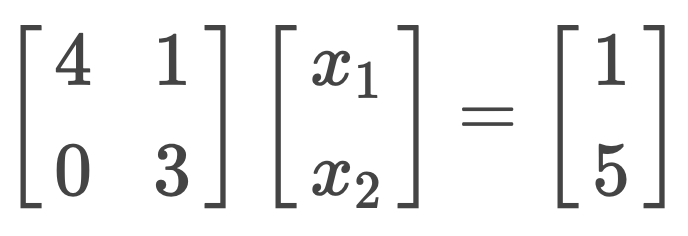
is solved by Jacobi iteration and the solution vector after the 3rd iteration is
The residual norm is evaluated using Linfinity norm as
4
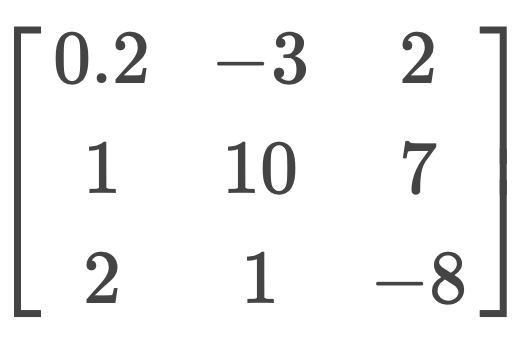
Faced with the following coefficient matrix of a system of equations to be solved by Gauss elimination methods, will partial pivoting be required?
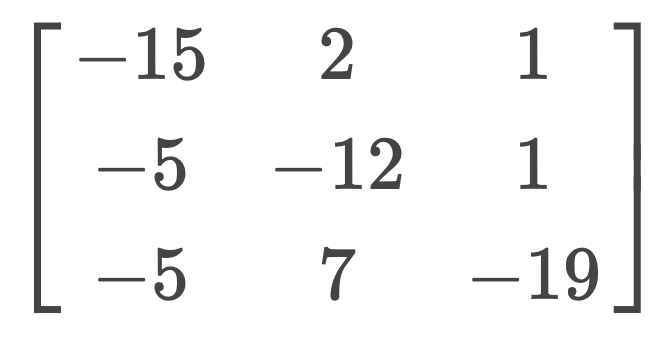
No, because the matrix is diagonally dominant
The Thomas algorithm:
can store and solve the problem on 4 vectors
is used to solve tridiagonal systems of linear equations
can be applied to a set of equations with a fully populated matrix [A]
used Crout’s method to find the factors of the coefficient matrix [A]
is an iterative method of solution of linear systems
is used to solve tridiagonal systems of linear equations
can store and solve the problem on 4 vectors
used Crout’s method to find the factors of the coefficient matrix [A]
If a set of simultaneous equations [A]{x}={b} is solved by an iterative and [A] is a 200 × 200 metric and if it takes K=10 iterations to converge, the then number of floating point operations taken to find the solution is estimated to be of the order of
400,000
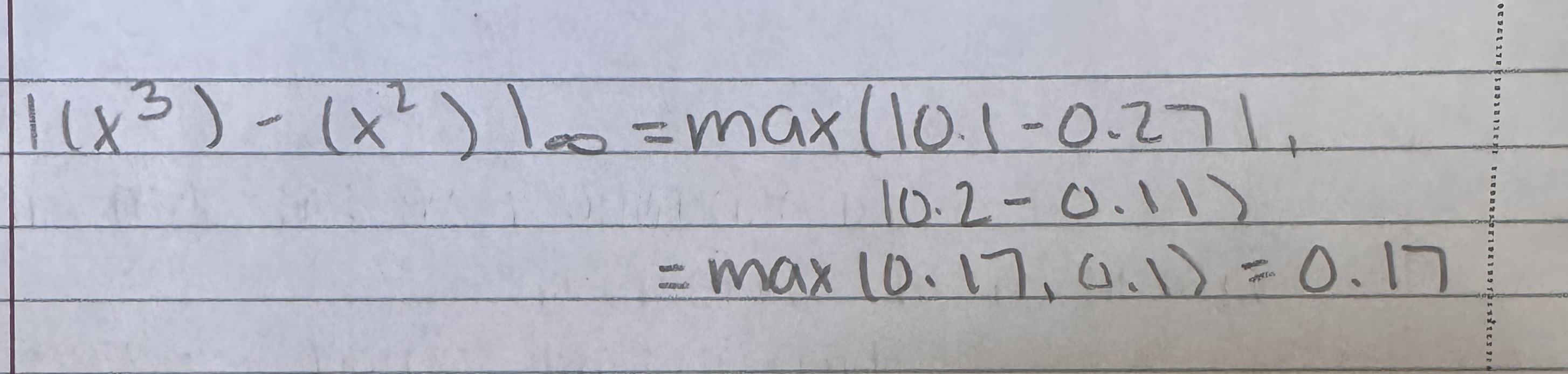
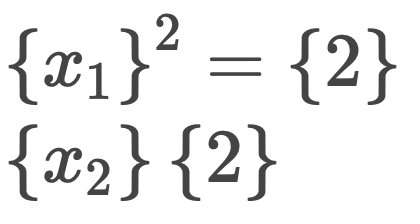
When solving a linear system of equations by Jacobi iteration, given the following two vectors at iterations 2 and 3
{x}^2 = {0.27}
{ 0.1 }
{x}^3 = { 0.1 }
{ 0.2 }
using the Linf norm the iterative convergence criterion is:
0.17
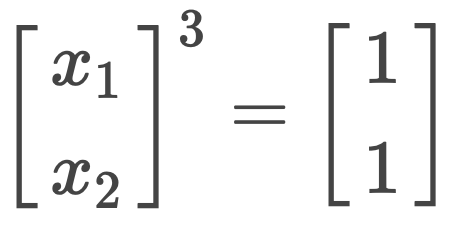
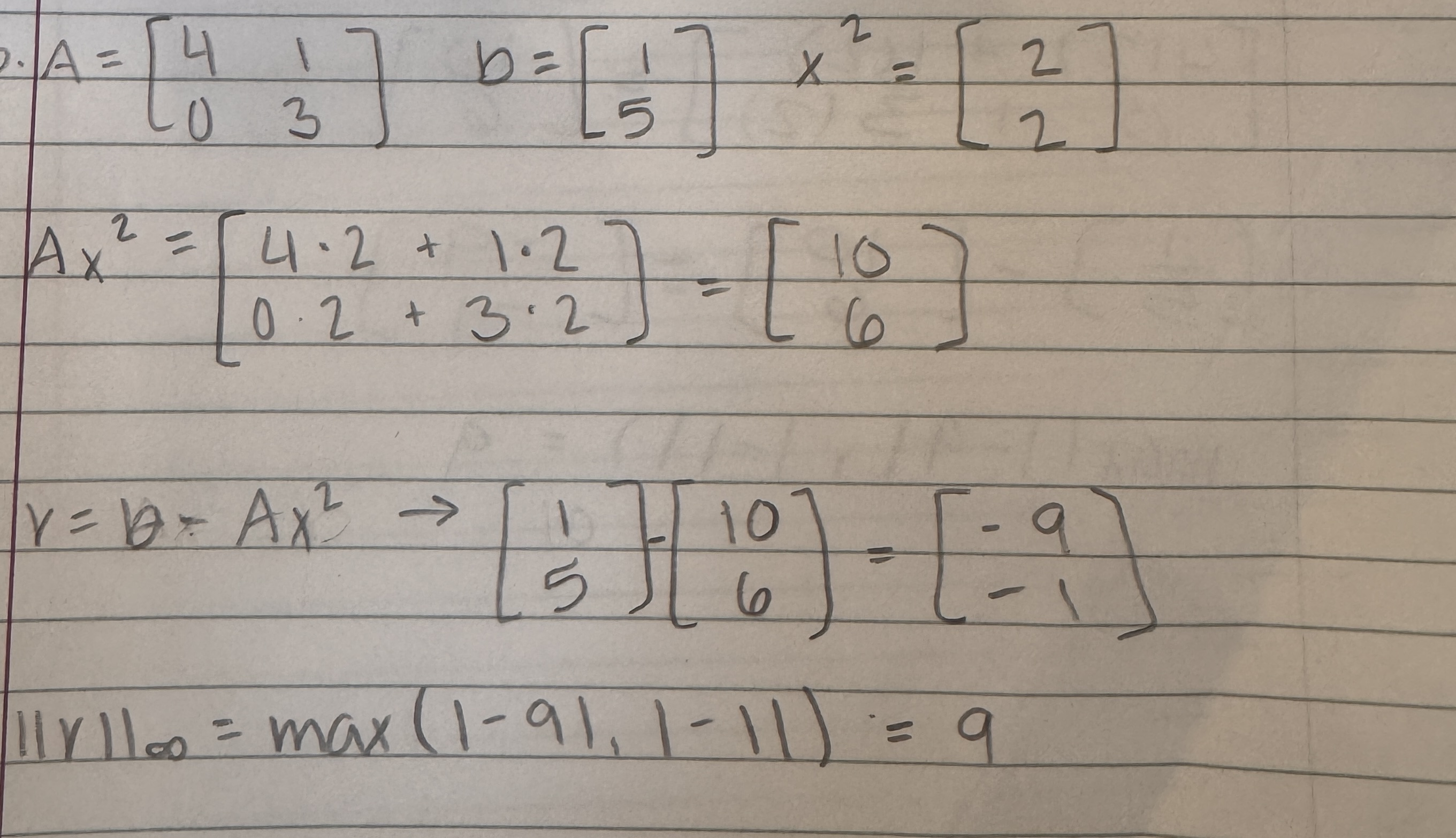
The system of equations
is solved by the Jacobi iteration and the solution vector after the 3rd iteration is
The residual norm is evaluated using the Linf norm as
9
#6 card explanation
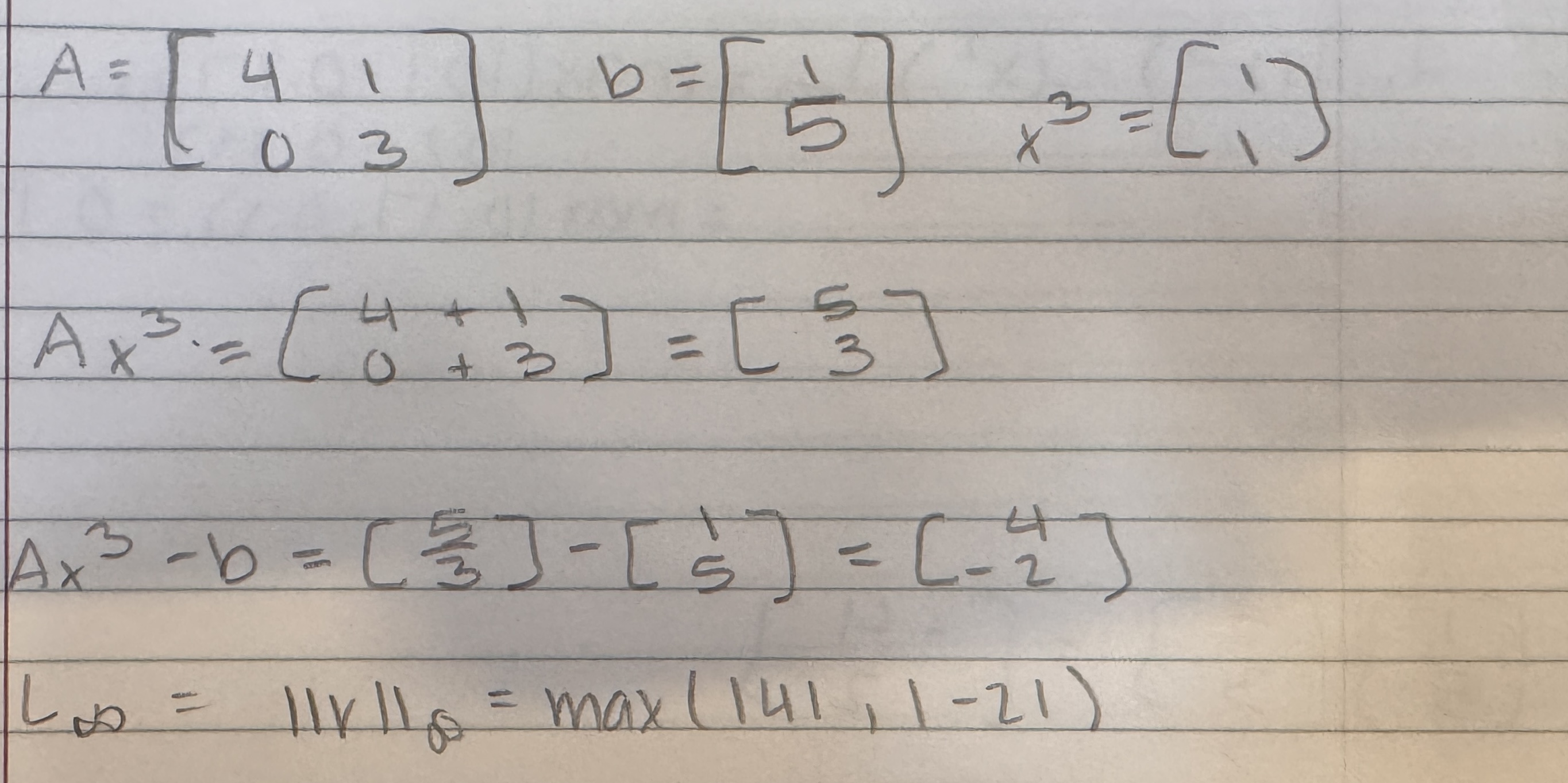
=4
#9 card explanation (applies to card #3)

#11 card explanation
#10 card explanation